- Эвольвентные поверхности. Основы теории режущих инструментов

Содержание
- 2. Эвольвентные поверхности в деталях машин Прямозубые – Эвольвентная цилиндрическая поверхность Цилиндрические зубчатые колеса Косозубые – Эвольвентная
- 3. Эвольвента окружности Эвольвента окружности представляет собой траекторию любой точки прямой линии, перекатываемой по окружности без скольжения;
- 4. Образование эвольвенты окружности
- 5. Прямоугольная и полярная система координат В прямоугольной (декартовой) система координат положение точки определяется координатами X и
- 6. Уравнение эвольвенты в полярной системе координат ОМ0 – соответствует началу угловой координат; ρ – радиус текущей
- 7. Уравнения эвольвенты окружности В параметрическом виде уравнения эвольвенты окружности выглядят следующим образом: rb – радиус основной
- 8. Эвольвентная цилиндрическая поверхность П – плоскость поперечного сечения основного цилиндра К – плоскость, касательная к основному
- 9. Эвольвентная винтовая поверхность τ - угол подъема винтовой линии на основном цилиндре; σ - угол наклона
- 10. Эвольвентная коническая поверхность К – плоскость, касательная к основному конусу; АВ – образующая прямая; Точка на
- 11. Преобразование систем координат Все формулы преобразования систем координат основаны на переносе начала координат и повороте осей;
- 12. Преобразование систем координат Поворот координатных осей на угол τ XY => X0Y0 : Х0 = m
- 13. Преобразование систем координат Винтовое движение системы координат Система XYZ движется вдоль оси Z и вращается вокруг
- 15. Скачать презентацию
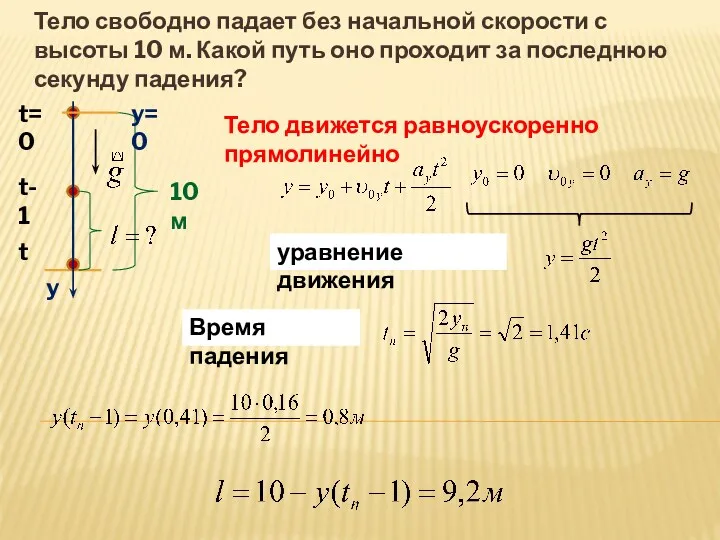 Свободное падение
Свободное падение Ознакомление с автомобилем 580 и его системами
Ознакомление с автомобилем 580 и его системами Тепловые явления. Температура
Тепловые явления. Температура Мастер-класс Формирование мотивации к изучению предмета посредством использования информационно - коммуникационных технологий на уроках физики
Мастер-класс Формирование мотивации к изучению предмета посредством использования информационно - коммуникационных технологий на уроках физики Решение задач по теме: Основы МКТ
Решение задач по теме: Основы МКТ Факты о которых мы не знали
Факты о которых мы не знали Силы в природе
Силы в природе Основы кристаллизации расплавов
Основы кристаллизации расплавов Опиливание металла
Опиливание металла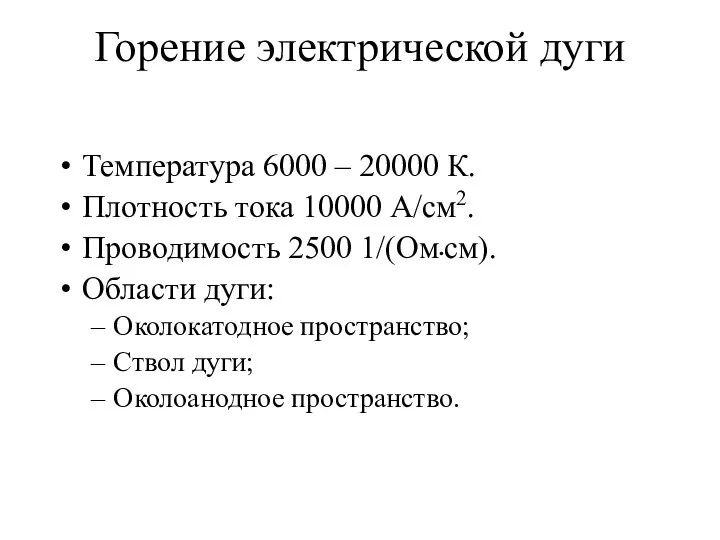 Горение электрической дуги
Горение электрической дуги Дисперсия света
Дисперсия света Связи. Реакции связей
Связи. Реакции связей Центр ваги твердого тіла
Центр ваги твердого тіла Индукция магнитного поля. Магнитный поток
Индукция магнитного поля. Магнитный поток Неисправности гидросистемы зерноуборочного комбайна ДОН-1500 и их методы устранения
Неисправности гидросистемы зерноуборочного комбайна ДОН-1500 и их методы устранения Жидкостная хроматография
Жидкостная хроматография Модернизация и моделирование электропривода дверей лифта за счет применения линейного двигателя
Модернизация и моделирование электропривода дверей лифта за счет применения линейного двигателя Нагревание проводников электрическим током. Закон Джоуля – Ленца
Нагревание проводников электрическим током. Закон Джоуля – Ленца Средства измерений
Средства измерений Электростатика
Электростатика Электрическое напряжение
Электрическое напряжение Адгезия және сулану. Дәріс 6
Адгезия және сулану. Дәріс 6 Презентация к уроку физики Электромагниты
Презентация к уроку физики Электромагниты Расчет пути и времени движения
Расчет пути и времени движения Изобретение электричества. История, применение, получение
Изобретение электричества. История, применение, получение Вертолет Ми-8МТВ. Рулевой винт
Вертолет Ми-8МТВ. Рулевой винт Силы в природе
Силы в природе Принцип Бернулли. Закон Бернулли
Принцип Бернулли. Закон Бернулли