- Operating System Concepts

Содержание
- 2. Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to
- 3. Objectives Explore the structure of an operating system’s I/O subsystem Discuss the principles of I/O hardware
- 4. Overview I/O management is a major component of operating system design and operation Important aspect of
- 5. I/O Hardware Incredible variety of I/O devices Storage Transmission Human-interface Common concepts – signals from I/O
- 6. A Typical PC Bus Structure
- 7. I/O Hardware (Cont.) I/O instructions control devices Devices usually have registers where device driver places commands,
- 8. Device I/O Port Locations on PCs (partial)
- 9. Polling For each byte of I/O Read busy bit from status register until 0 Host sets
- 10. Interrupts Polling can happen in 3 instruction cycles Read status, logical-and to extract status bit, branch
- 11. Interrupt-Driven I/O Cycle
- 12. Intel Pentium Processor Event-Vector Table
- 13. Interrupts (Cont.) Interrupt mechanism also used for exceptions Terminate process, crash system due to hardware error
- 14. Direct Memory Access Used to avoid programmed I/O (one byte at a time) for large data
- 15. Six Step Process to Perform DMA Transfer
- 16. Application I/O Interface I/O system calls encapsulate device behaviors in generic classes Device-driver layer hides differences
- 17. A Kernel I/O Structure
- 18. Characteristics of I/O Devices
- 19. Characteristics of I/O Devices (Cont.) Subtleties of devices handled by device drivers Broadly I/O devices can
- 20. Block and Character Devices Block devices include disk drives Commands include read(), write(), seek() Raw I/O,
- 21. Network Devices Varying enough from block and character to have own interface Unix and Windows NT/9x/2000
- 22. Clocks and Timers Provide current time, elapsed time, timer Normal resolution about 1/60 second Some systems
- 23. Blocking and Nonblocking I/O Blocking - process suspended until I/O completed Easy to use and understand
- 24. Two I/O Methods Synchronous Asynchronous
- 25. Kernel I/O Subsystem Scheduling Some I/O request ordering via per-device queue Some OSs try fairness Some
- 26. Device-status Table
- 27. Sun Enterprise 6000 Device-Transfer Rates
- 28. Kernel I/O Subsystem Caching - faster device holding copy of data Always just a copy Key
- 29. Error Handling OS can recover from disk read, device unavailable, transient write failures Retry a read
- 30. I/O Protection User process may accidentally or purposefully attempt to disrupt normal operation via illegal I/O
- 31. Use of a System Call to Perform I/O
- 32. Kernel Data Structures Kernel keeps state info for I/O components, including open file tables, network connections,
- 33. UNIX I/O Kernel Structure
- 34. I/O Requests to Hardware Operations Consider reading a file from disk for a process Determine device
- 35. Life Cycle of An I/O Request
- 36. STREAMS STREAM – a full-duplex communication channel between a user-level process and a device in Unix
- 37. The STREAMS Structure
- 38. Performance I/O a major factor in system performance Demands CPU to execute device driver, kernel I/O
- 39. Intercomputer Communications
- 40. Improving Performance Reduce number of context switches Reduce data copying Reduce interrupts by using large transfers,
- 42. Скачать презентацию
Chapter 13: I/O Systems
I/O Hardware
Application I/O Interface
Kernel I/O Subsystem
Transforming I/O Requests
Chapter 13: I/O Systems
I/O Hardware
Application I/O Interface
Kernel I/O Subsystem
Transforming I/O Requests
Objectives
Explore the structure of an operating system’s I/O subsystem
Discuss the principles
Objectives
Explore the structure of an operating system’s I/O subsystem
Discuss the principles
Overview
I/O management is a major component of operating system design and
Overview
I/O management is a major component of operating system design and
I/O Hardware
Incredible variety of I/O devices
Storage
Transmission
Human-interface
Common concepts – signals from I/O
I/O Hardware
Incredible variety of I/O devices
Storage
Transmission
Human-interface
Common concepts – signals from I/O
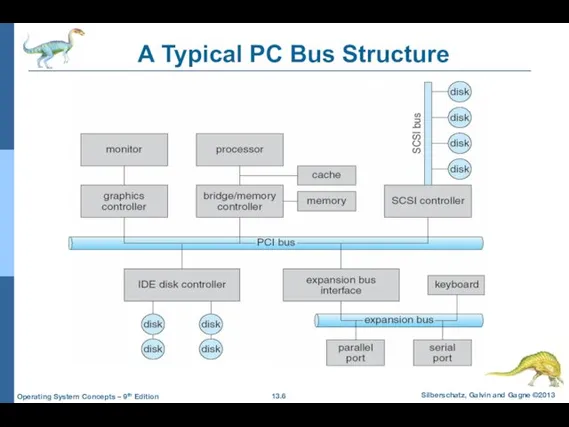
A Typical PC Bus Structure
A Typical PC Bus Structure
I/O Hardware (Cont.)
I/O instructions control devices
Devices usually have registers where device
I/O Hardware (Cont.)
I/O instructions control devices
Devices usually have registers where device
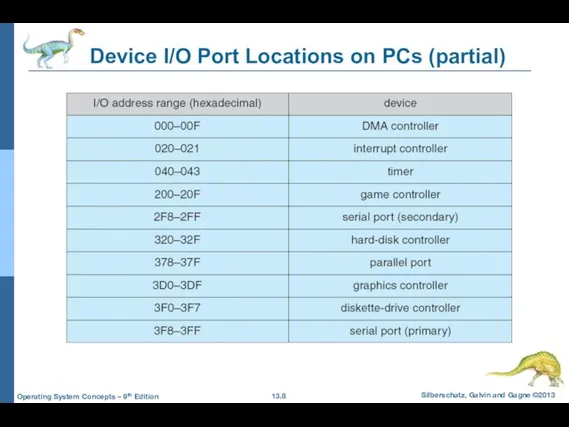
Device I/O Port Locations on PCs (partial)
Device I/O Port Locations on PCs (partial)
Polling
For each byte of I/O
Read busy bit from status register until
Polling
For each byte of I/O
Read busy bit from status register until
Interrupts
Polling can happen in 3 instruction cycles
Read status, logical-and to extract
Interrupts
Polling can happen in 3 instruction cycles
Read status, logical-and to extract
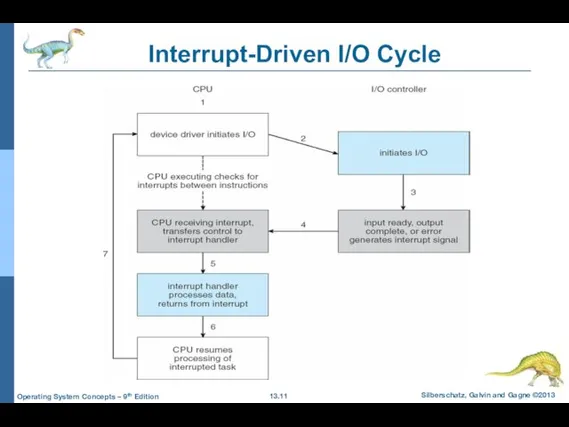
Interrupt-Driven I/O Cycle
Interrupt-Driven I/O Cycle
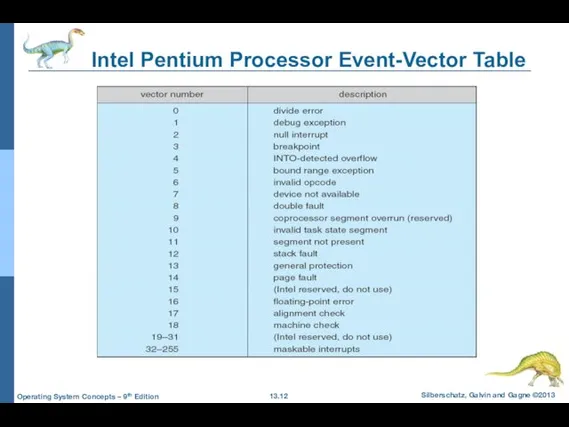
Intel Pentium Processor Event-Vector Table
Intel Pentium Processor Event-Vector Table
Interrupts (Cont.)
Interrupt mechanism also used for exceptions
Terminate process, crash system due
Interrupts (Cont.)
Interrupt mechanism also used for exceptions
Terminate process, crash system due
Direct Memory Access
Used to avoid programmed I/O (one byte at a
Direct Memory Access
Used to avoid programmed I/O (one byte at a
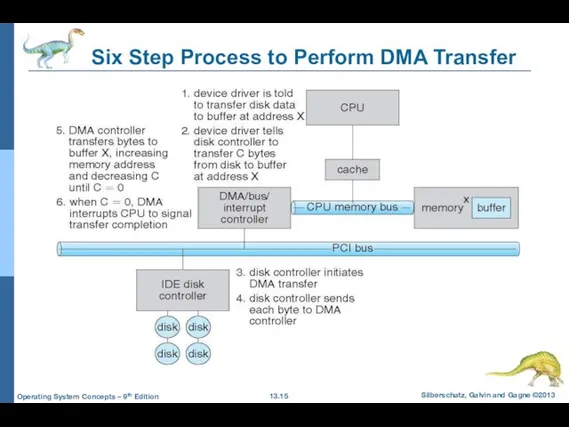
Six Step Process to Perform DMA Transfer
Six Step Process to Perform DMA Transfer
Application I/O Interface
I/O system calls encapsulate device behaviors in generic classes
Device-driver
Application I/O Interface
I/O system calls encapsulate device behaviors in generic classes
Device-driver
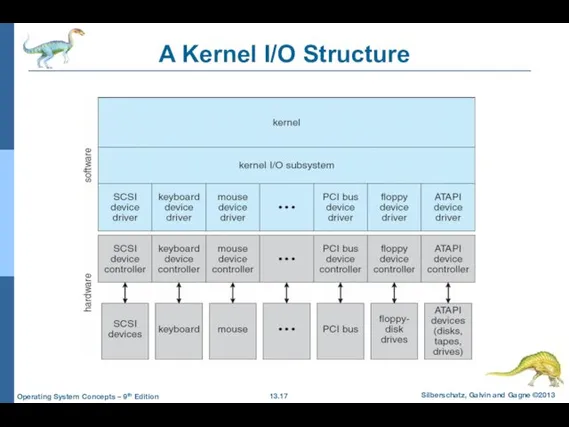
A Kernel I/O Structure
A Kernel I/O Structure
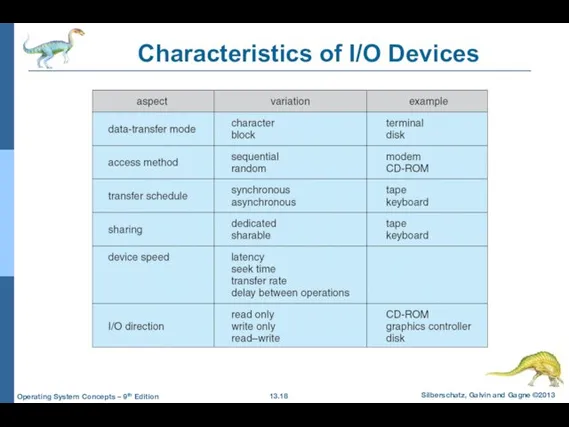
Characteristics of I/O Devices
Characteristics of I/O Devices
Characteristics of I/O Devices (Cont.)
Subtleties of devices handled by device drivers
Broadly
Characteristics of I/O Devices (Cont.)
Subtleties of devices handled by device drivers
Broadly
Block and Character Devices
Block devices include disk drives
Commands include read(), write(),
Block and Character Devices
Block devices include disk drives
Commands include read(), write(),
Network Devices
Varying enough from block and character to have own interface
Unix
Network Devices
Varying enough from block and character to have own interface
Unix
Clocks and Timers
Provide current time, elapsed time, timer
Normal resolution about 1/60
Clocks and Timers
Provide current time, elapsed time, timer
Normal resolution about 1/60
Blocking and Nonblocking I/O
Blocking - process suspended until I/O completed
Easy to
Blocking and Nonblocking I/O
Blocking - process suspended until I/O completed
Easy to
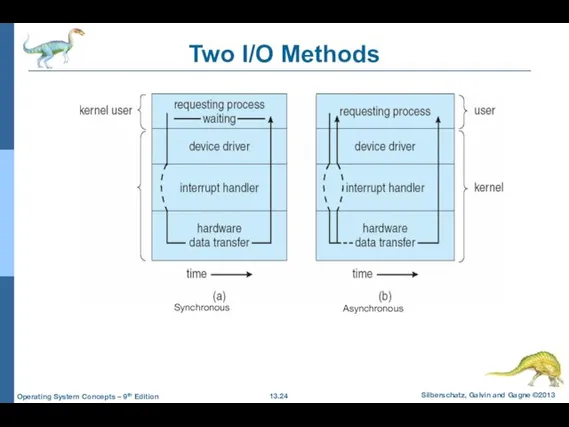
Two I/O Methods
Synchronous
Asynchronous
Two I/O Methods
Synchronous
Asynchronous
Kernel I/O Subsystem
Scheduling
Some I/O request ordering via per-device queue
Some OSs try
Kernel I/O Subsystem
Scheduling
Some I/O request ordering via per-device queue
Some OSs try
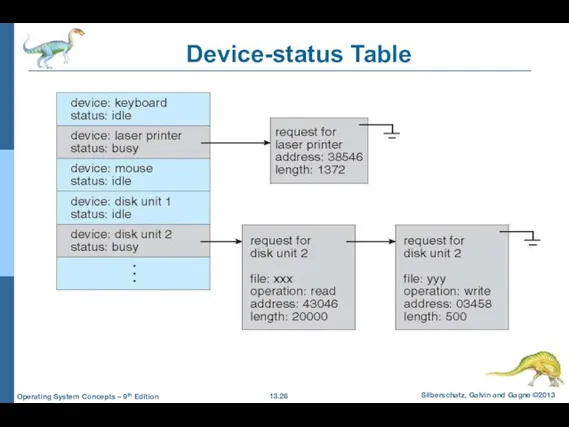
Device-status Table
Device-status Table
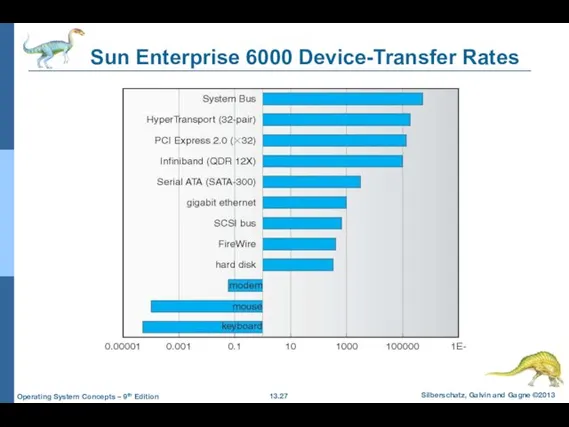
Sun Enterprise 6000 Device-Transfer Rates
Sun Enterprise 6000 Device-Transfer Rates
Kernel I/O Subsystem
Caching - faster device holding copy of data
Always just
Kernel I/O Subsystem
Caching - faster device holding copy of data
Always just
Error Handling
OS can recover from disk read, device unavailable, transient write
Error Handling
OS can recover from disk read, device unavailable, transient write
I/O Protection
User process may accidentally or purposefully attempt to disrupt normal
I/O Protection
User process may accidentally or purposefully attempt to disrupt normal
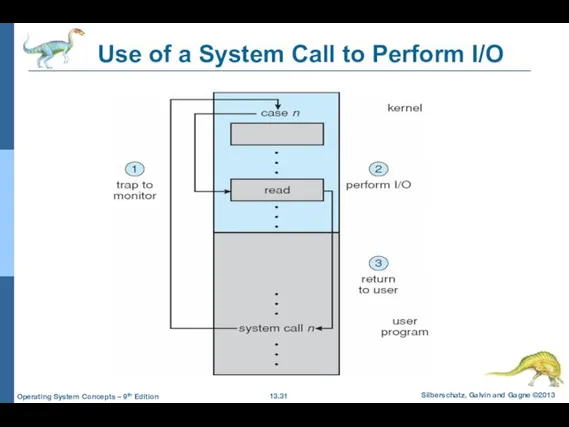
Use of a System Call to Perform I/O
Use of a System Call to Perform I/O
Kernel Data Structures
Kernel keeps state info for I/O components, including open
Kernel Data Structures
Kernel keeps state info for I/O components, including open
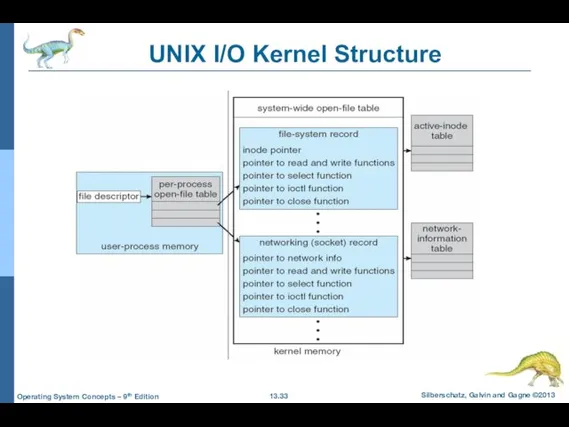
UNIX I/O Kernel Structure
UNIX I/O Kernel Structure
I/O Requests to Hardware Operations
Consider reading a file from disk for
I/O Requests to Hardware Operations
Consider reading a file from disk for
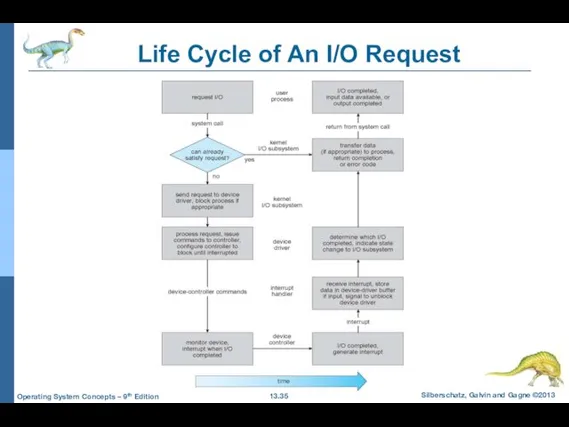
Life Cycle of An I/O Request
Life Cycle of An I/O Request
STREAMS
STREAM – a full-duplex communication channel between a user-level process and
STREAMS
STREAM – a full-duplex communication channel between a user-level process and
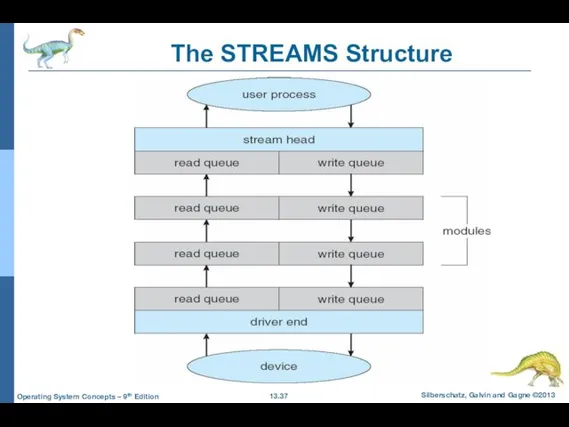
The STREAMS Structure
The STREAMS Structure
Performance
I/O a major factor in system performance
Demands CPU to execute device
Performance
I/O a major factor in system performance
Demands CPU to execute device
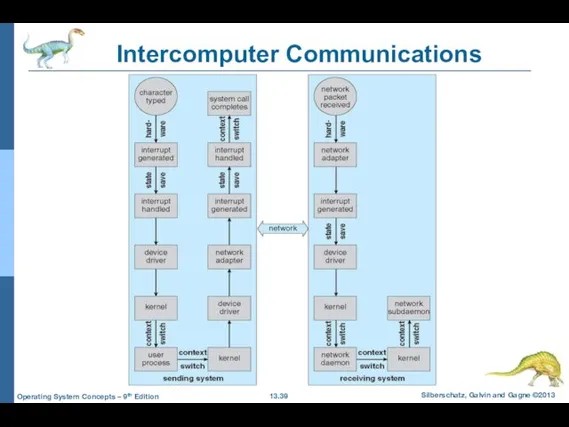
Intercomputer Communications
Intercomputer Communications
Improving Performance
Reduce number of context switches
Reduce data copying
Reduce interrupts by using
Improving Performance
Reduce number of context switches
Reduce data copying
Reduce interrupts by using
 Способы получения металлов и сплавов
Способы получения металлов и сплавов Жарочные тепловые аппараты
Жарочные тепловые аппараты МАСТЕР-КЛАСС ПО ТЕМЕ: СОЗДАНИЕ КЛИПА НА ОСНОВЕ ФОТОМАТЕРИАЛОВ, КАК ОДИН ИЗ ВАРИАНТОВ РЕФЛЕКСИИ МЕРОПРИЯТИЯ ВО ВНЕУРОЧНОЙ ДЕЯТЕЛЬНОСТИ
МАСТЕР-КЛАСС ПО ТЕМЕ: СОЗДАНИЕ КЛИПА НА ОСНОВЕ ФОТОМАТЕРИАЛОВ, КАК ОДИН ИЗ ВАРИАНТОВ РЕФЛЕКСИИ МЕРОПРИЯТИЯ ВО ВНЕУРОЧНОЙ ДЕЯТЕЛЬНОСТИ roman_2
roman_2 Основные условные графические обозначения и изображения элементов генерального плана и сооружений транспорта
Основные условные графические обозначения и изображения элементов генерального плана и сооружений транспорта Конструктивная характеристика одежды, обуви и кожгалантерейных изделий
Конструктивная характеристика одежды, обуви и кожгалантерейных изделий Имя существительное
Имя существительное Профессионально-прикладная физическая подготовка
Профессионально-прикладная физическая подготовка PERTime
PERTime Маркетинг персонала: понятие, задачи, функции
Маркетинг персонала: понятие, задачи, функции Герои любимых сказок
Герои любимых сказок День Святого Валентина
День Святого Валентина Балалардағы асқазан мен он екі елі ішектің жара аурулары
Балалардағы асқазан мен он екі елі ішектің жара аурулары Архангельская область России
Архангельская область России Презентация Наши новые друзья
Презентация Наши новые друзья DeepL Pro для редактирования презентации
DeepL Pro для редактирования презентации Джанни Родари. Викторина по сказке Приключения Чиполлино
Джанни Родари. Викторина по сказке Приключения Чиполлино Презентация к внеурочному занятию Мы идем в гости2 класс
Презентация к внеурочному занятию Мы идем в гости2 класс 20240122_slozh_i_vychit
20240122_slozh_i_vychit Шаблон Фракталы-11
Шаблон Фракталы-11 Лекция_презентация_Материальные ресурсы_Основные средства
Лекция_презентация_Материальные ресурсы_Основные средства Этапы процесса транскрипции в генетике. (Лекция 16)
Этапы процесса транскрипции в генетике. (Лекция 16) Юбилей Усогорска
Юбилей Усогорска Проведение ОПИ для снижения обводненности добывающих скважин Арланского месторождения ООО Башнефть-добыча
Проведение ОПИ для снижения обводненности добывающих скважин Арланского месторождения ООО Башнефть-добыча Қуысты мүшелердің жабық жарақаты
Қуысты мүшелердің жабық жарақаты Устойчивое развитие территорий (2)
Устойчивое развитие территорий (2) Растворы. Массовая доля растворенного вещества.
Растворы. Массовая доля растворенного вещества. Интерполяция. G-коды
Интерполяция. G-коды