- Бортовая аппаратура управления ЗУР 9М39

Содержание
- 2. Вопросы занятия: 1-ый вопрос: Состав бортовой аппаратуры управления полётом ЗУР. 2 – ой вопрос: Работа бортовой
- 3. 1-ый вопрос: Состав бортовой аппаратуры управления полётом ЗУР. Бортовая аппаратура (БА) ЗУР 9М39 представляет собой совокупность
- 4. Рис. 1. Структурная схема бортовой аппаратуры ЗУР 9М39
- 5. Структурный состав бортовой аппаратуры: ОГС, включает: координатор цели (КЦ); устройство выработки команд (УВК). АП, включает: одноканальный
- 6. В режиме «СЛЕЖЕНИЕ» для автоматического непрерывного совмещения оптической оси объектива с продольной осью ракеты необходимо иметь
- 7. Если плоскость вращения магнита ротора гироскопа совпадает с плоскостью витков пеленговой обмотки, то ЭДС, наводимая в
- 8. Координатор цели является функциональной системой и представляет собой замкнутый контур с изменяющейся структурой в зависимости от
- 9. В контур арретирования включен элемент – обмотка заклона (ОбЗкл), вырабатывающая постоянной величины напряжение UηЗ, обеспечивающее отклонение
- 10. В режиме «СЛЕЖ.», обеспечивающем измерение угловой скорости линии визирования «ракета-цель» в процессе автоматического сопровождения цели, по
- 11. 2 – ой вопрос: Работа бортовой аппаратуры управления полётом ЗУР по функциональной схеме. Функциональный состав бортовой
- 12. Координатор цели. Обмотка пеленга является измерительным элементом угла пеленга, используемого в работе контура арретирования и формирования
- 13. Интегральный модуль (ИМ) в составе анализаторов изображения (АИ) и фотоприемных устройств (ФПУ) в каждом канале осуществляет
- 14. Усилитель коррекции осуществляет фильтрацию детектированных сигналов и усиления их по мощности. Нагрузкой усилителя мощности являются обмотки
- 15. Канал защиты от воздействия помех типа ЛТЦ обеспечивает установление факта наличия в поле зрения пеленгатора помехи
- 16. Схема ближней зоны (СБЗ) функционирует вблизи цели на такой относительной дальности, при которой наступает «ослепление» пеленгатора.
- 17. Система стабилизации оборотов гироскопа обеспечивает постоянство угловой скорости вращения гироскопа, которая определяет частоту модуляции сигнала ошибки.
- 19. Скачать презентацию
Вопросы занятия:
1-ый вопрос: Состав бортовой аппаратуры управления полётом ЗУР.
2 – ой
Вопросы занятия:
1-ый вопрос: Состав бортовой аппаратуры управления полётом ЗУР.
2 – ой
1-ый вопрос: Состав бортовой аппаратуры управления полётом ЗУР.
Бортовая аппаратура (БА)
1-ый вопрос: Состав бортовой аппаратуры управления полётом ЗУР.
Бортовая аппаратура (БА)
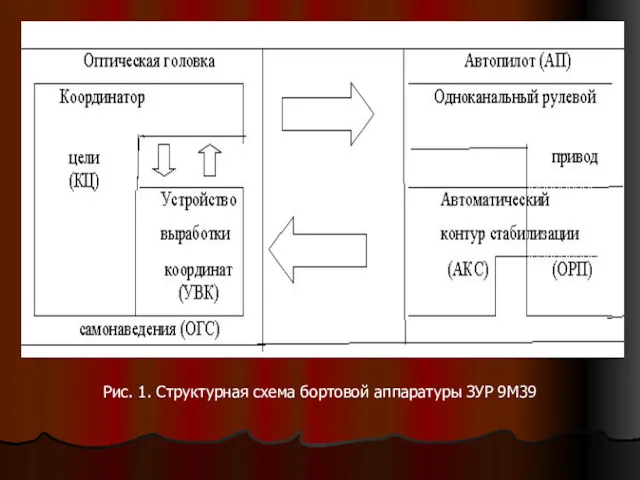
Рис. 1. Структурная схема бортовой аппаратуры ЗУР 9М39
Рис. 1. Структурная схема бортовой аппаратуры ЗУР 9М39
Структурный состав бортовой аппаратуры:
ОГС, включает:
координатор цели (КЦ);
устройство выработки команд (УВК).
АП, включает:
одноканальный
Структурный состав бортовой аппаратуры:
ОГС, включает:
координатор цели (КЦ);
устройство выработки команд (УВК).
АП, включает:
одноканальный
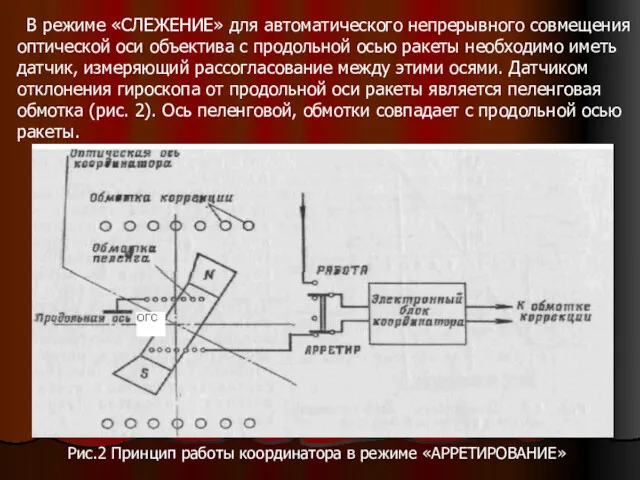
В режиме «СЛЕЖЕНИЕ» для автоматического непрерывного совмещения оптической оси объектива
В режиме «СЛЕЖЕНИЕ» для автоматического непрерывного совмещения оптической оси объектива
Если плоскость вращения магнита ротора гироскопа совпадает с плоскостью витков
Если плоскость вращения магнита ротора гироскопа совпадает с плоскостью витков
Координатор цели является функциональной системой и представляет собой замкнутый контур
Координатор цели является функциональной системой и представляет собой замкнутый контур
В контур арретирования включен элемент – обмотка заклона (ОбЗкл), вырабатывающая
В контур арретирования включен элемент – обмотка заклона (ОбЗкл), вырабатывающая
В режиме «СЛЕЖ.», обеспечивающем измерение угловой скорости линии визирования «ракета-цель»
В режиме «СЛЕЖ.», обеспечивающем измерение угловой скорости линии визирования «ракета-цель»
2 – ой вопрос: Работа бортовой аппаратуры управления полётом ЗУР по
2 – ой вопрос: Работа бортовой аппаратуры управления полётом ЗУР по
Координатор цели.
Обмотка пеленга является измерительным элементом угла пеленга, используемого в
Координатор цели.
Обмотка пеленга является измерительным элементом угла пеленга, используемого в
Интегральный модуль (ИМ) в составе анализаторов изображения (АИ) и фотоприемных устройств
Интегральный модуль (ИМ) в составе анализаторов изображения (АИ) и фотоприемных устройств
Усилитель коррекции осуществляет фильтрацию детектированных сигналов и усиления их по мощности.
Усилитель коррекции осуществляет фильтрацию детектированных сигналов и усиления их по мощности.
Канал защиты от воздействия помех типа ЛТЦ обеспечивает установление факта наличия
Канал защиты от воздействия помех типа ЛТЦ обеспечивает установление факта наличия
Схема ближней зоны (СБЗ) функционирует вблизи цели на такой относительной дальности,
Схема ближней зоны (СБЗ) функционирует вблизи цели на такой относительной дальности,
Система стабилизации оборотов гироскопа обеспечивает постоянство угловой скорости вращения гироскопа, которая
Система стабилизации оборотов гироскопа обеспечивает постоянство угловой скорости вращения гироскопа, которая
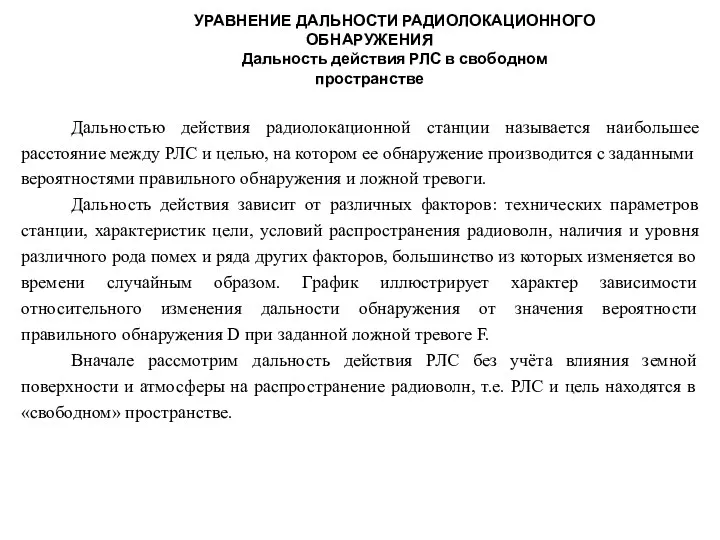 Уравнение дальности радиолокационного обнаружения
Уравнение дальности радиолокационного обнаружения :Организация, вооружение боевая техника мотострелковых и танковых подразделений сухопутных войск
:Организация, вооружение боевая техника мотострелковых и танковых подразделений сухопутных войск Система охлаждения и подогрева двигателя танка Т-72. (Тема 7.1)
Система охлаждения и подогрева двигателя танка Т-72. (Тема 7.1) Форми бойового застосування та способи бойових дій авіаційних частин, підрозділів. (Тема 9)
Форми бойового застосування та способи бойових дій авіаційних частин, підрозділів. (Тема 9) Строевые приемы и движение с оружием
Строевые приемы и движение с оружием Тактико-технические характеристики вооружения и военной техники мотопехотного (пехотного) батальона армий иностранных государств
Тактико-технические характеристики вооружения и военной техники мотопехотного (пехотного) батальона армий иностранных государств Методологія управління та прийняття рішень командиром взводу з обліку особового складу і підведення підсумків
Методологія управління та прийняття рішень командиром взводу з обліку особового складу і підведення підсумків Организация обороны Российской Федерации
Организация обороны Российской Федерации Крылатые ракеты
Крылатые ракеты Обязательная подготовка граждан к военной службе
Обязательная подготовка граждан к военной службе Пункт отбора на военную службу по контракту
Пункт отбора на военную службу по контракту Средства и способы специальной обработки
Средства и способы специальной обработки Основные виды воинской деятельности
Основные виды воинской деятельности Зажигательное оружие как разновидность оружия массового поражения
Зажигательное оружие как разновидность оружия массового поражения Организация, вооружение и боевая техника подразделений танкового (мотострелкового) батальона
Организация, вооружение и боевая техника подразделений танкового (мотострелкового) батальона Требования, предъявляемые к российским военнослужащим при работе с оружием или военной техникой
Требования, предъявляемые к российским военнослужащим при работе с оружием или военной техникой Россия в системе современной международной безопасности
Россия в системе современной международной безопасности Вимірювання потужності
Вимірювання потужності Вооруженные Силы Российской Федерации
Вооруженные Силы Российской Федерации Основы военно-педагогических знаний. Воспитательная работа командира с личным составом. Идеологическая подготовка. (Тема 2.2)
Основы военно-педагогических знаний. Воспитательная работа командира с личным составом. Идеологическая подготовка. (Тема 2.2) Назначение, боевые свойства и общее устройство АК-74. Тема №13
Назначение, боевые свойства и общее устройство АК-74. Тема №13 Современные виды вооружения и военной техники в Российской
Современные виды вооружения и военной техники в Российской Порядок перевірки технічного стану УПО з допомогою пульта контролю ПК і ПОУ-СВ
Порядок перевірки технічного стану УПО з допомогою пульта контролю ПК і ПОУ-СВ Порядок и правила ношения формы одежды
Порядок и правила ношения формы одежды Противовоздушная оборона. Инженерное обеспечение
Противовоздушная оборона. Инженерное обеспечение Значение обязательности подготовки граждан к военной службе
Значение обязательности подготовки граждан к военной службе Самолеты беспилотники. Модели-копии самолетов беспилотников
Самолеты беспилотники. Модели-копии самолетов беспилотников Область применения получаемых профессиональных знаний при исполнении обязанностей военной службы
Область применения получаемых профессиональных знаний при исполнении обязанностей военной службы