- Обчислювальний вузол (ОВ) цифрового обчислювального пристрою (ЦОП)

Содержание
- 2. Устрій та бойове застосування КЗА 86Ж6 Тема № 4: Апаратура автоматизованих робочих місць Заняття № 5:
- 3. ЛІТЕРАТУРА: 1. Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за редакцією Сторубльова О.І.) Навчальний посібник.
- 4. Навчальні питання Призначення та склад ЦОП РМ. Основні завдання, що вирішуються обчислювальним вузлом. Програми П1 -
- 5. 1. Призначення та склад ЦОП РМ (рис.49-50, с. 30-31) Цифровий обчислювальній пристрій (ЦОП) робочого місця призначений
- 6. 2. Основні завдання, що вирішуються обчислювальним вузлом 1. Підготовка інформації для формування розгортки на екранах індикаторів
- 7. 4. Перерахунок координат ЕТ, машинного маркера ММ та вектора з абсолютної системи координат до відносної, аналіз
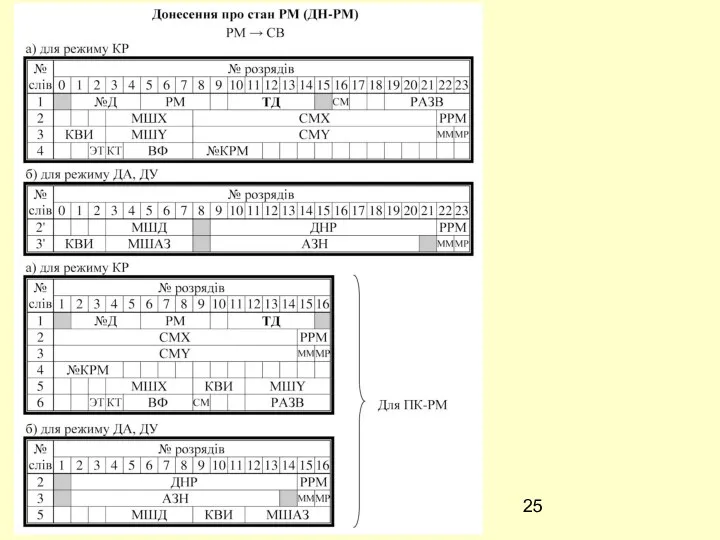
- 8. П1 ПРОГРАМА П1 слугує для формування первинних розгорток, для чого виконується розрахунок точок початку інтегрування Хі,
- 9. П2 ПРОГРАМА П2 є програмою видання та слугує для розрахунку координат початку сектора за координатами Х
- 10. П3 ПРОГРАМА П3 забезпечує перерахунок координат вторинної інформації, що надходить від СО-1 з типом координат ТК=1
- 11. П4 ПРОГРАМА П4 виконує перерахунок координат вторинної інформації з абсолютної системи координат до відносної. У підпрограмах
- 12. Таблиця 1 Програми ЦВУ
- 13. 3. Склад обчислювального вузла РМ за структурною схемою (рис.49, с. 30)
- 14. 4. Принцип роботи ВУ під час реалізації програми П2 (рис.49, с. 30)
- 15. 1. Перерахунок координат початку сектора в режимі П2 НС БС
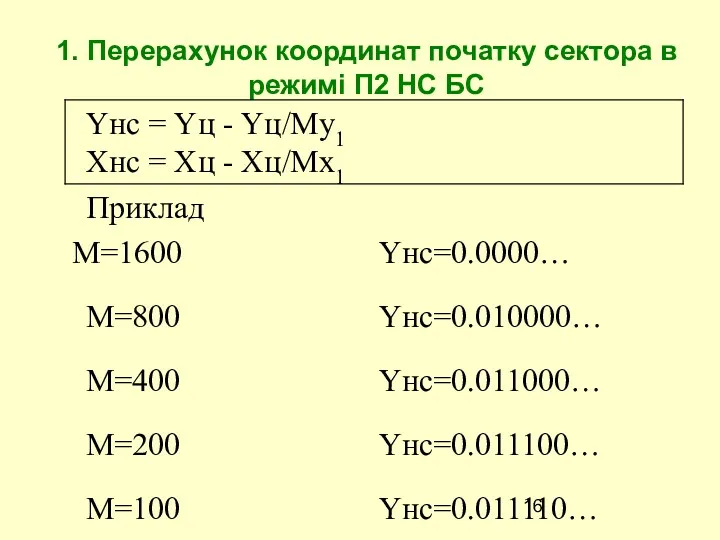
- 16. 1. Перерахунок координат початку сектора в режимі П2 НС БС
- 17. 2. Обчислення координат в режимі видачі інформації МАРКЕРА ОПЕРАТОРА з РМ П2 МО КР
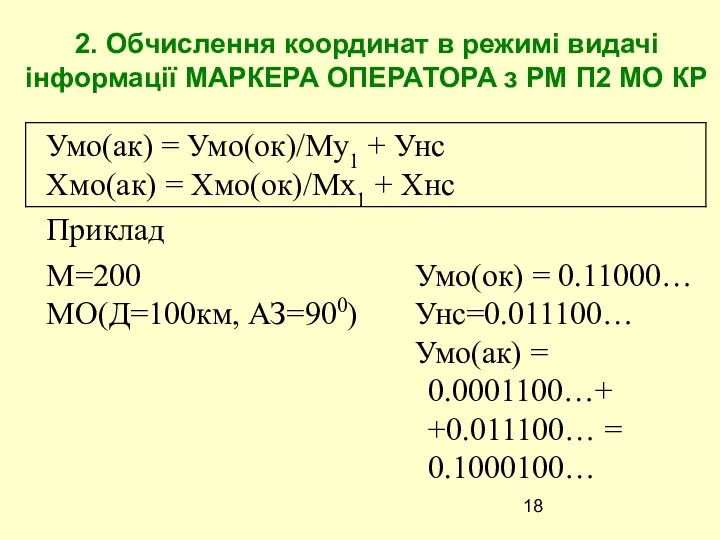
- 18. 2. Обчислення координат в режимі видачі інформації МАРКЕРА ОПЕРАТОРА з РМ П2 МО КР
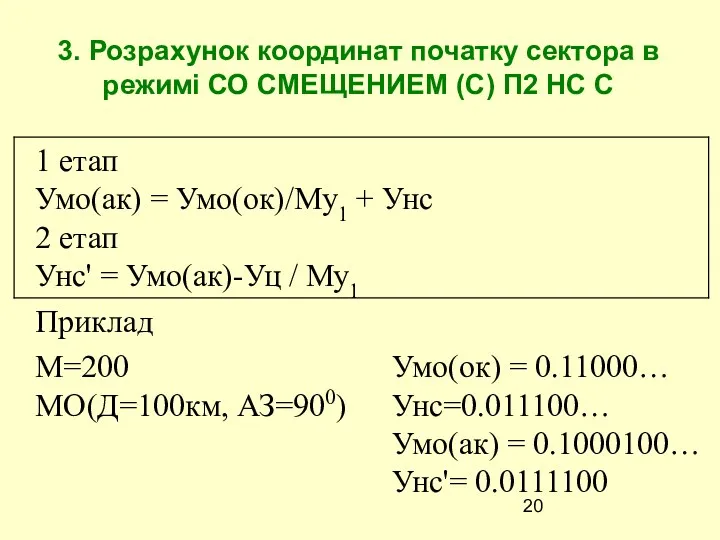
- 19. 3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П2 НС С
- 20. 3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П2 НС С
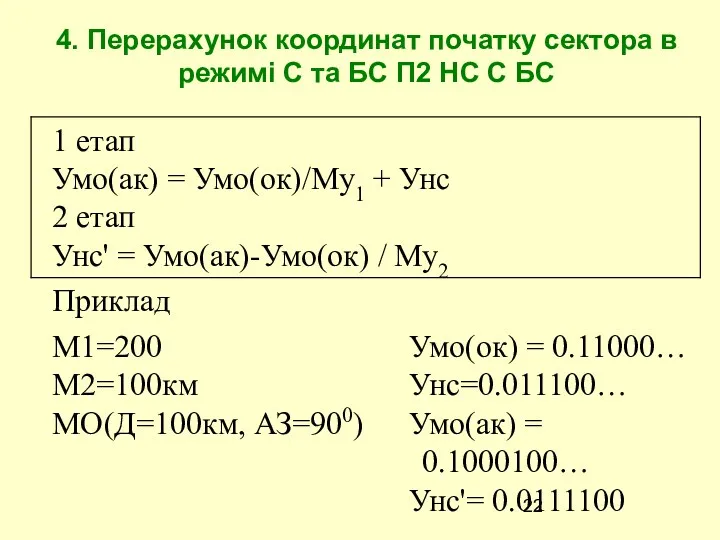
- 21. 4. Перерахунок координат початку сектора в режимі С та БС П2 НС С БС
- 22. 4. Перерахунок координат початку сектора в режимі С та БС П2 НС С БС
- 23. Запуск програми П2 НС БС
- 24. Таблиця 2 Програма П2
- 26. Перевірка роботи програми П2 (рис.59, с.36) 1. Увімкнути РМ, встановивши на ПРМ клавіші АК, КР, 90,
- 28. Скачать презентацию
Устрій та бойове застосування КЗА 86Ж6
Тема № 4: Апаратура автоматизованих робочих
Устрій та бойове застосування КЗА 86Ж6
Тема № 4: Апаратура автоматизованих робочих
ЛІТЕРАТУРА:
1. Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за
ЛІТЕРАТУРА: 1. Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за
Навчальні питання
Призначення та склад ЦОП РМ.
Основні завдання, що вирішуються обчислювальним
Навчальні питання
Призначення та склад ЦОП РМ.
Основні завдання, що вирішуються обчислювальним
1. Призначення та склад ЦОП РМ
(рис.49-50, с. 30-31)
Цифровий обчислювальній пристрій (ЦОП)
1. Призначення та склад ЦОП РМ
(рис.49-50, с. 30-31)
Цифровий обчислювальній пристрій (ЦОП)
2. Основні завдання, що вирішуються обчислювальним вузлом
1. Підготовка інформації для формування
2. Основні завдання, що вирішуються обчислювальним вузлом
1. Підготовка інформації для формування
4. Перерахунок координат ЕТ, машинного маркера ММ та вектора з абсолютної
4. Перерахунок координат ЕТ, машинного маркера ММ та вектора з абсолютної
П1
ПРОГРАМА П1 слугує для формування первинних розгорток, для чого виконується розрахунок
П1
ПРОГРАМА П1 слугує для формування первинних розгорток, для чого виконується розрахунок
П2
ПРОГРАМА П2 є програмою видання та слугує для розрахунку координат початку
П2
ПРОГРАМА П2 є програмою видання та слугує для розрахунку координат початку
П3
ПРОГРАМА П3 забезпечує перерахунок координат вторинної інформації, що надходить від СО-1
П3
ПРОГРАМА П3 забезпечує перерахунок координат вторинної інформації, що надходить від СО-1
П4
ПРОГРАМА П4 виконує перерахунок координат вторинної інформації з абсолютної системи координат
П4
ПРОГРАМА П4 виконує перерахунок координат вторинної інформації з абсолютної системи координат

Таблиця 1
Програми ЦВУ
Таблиця 1
Програми ЦВУ
3. Склад обчислювального вузла РМ за структурною схемою
(рис.49, с. 30)
3. Склад обчислювального вузла РМ за структурною схемою
(рис.49, с. 30)
4. Принцип роботи ВУ під час реалізації програми П2
(рис.49, с.
4. Принцип роботи ВУ під час реалізації програми П2 (рис.49, с.
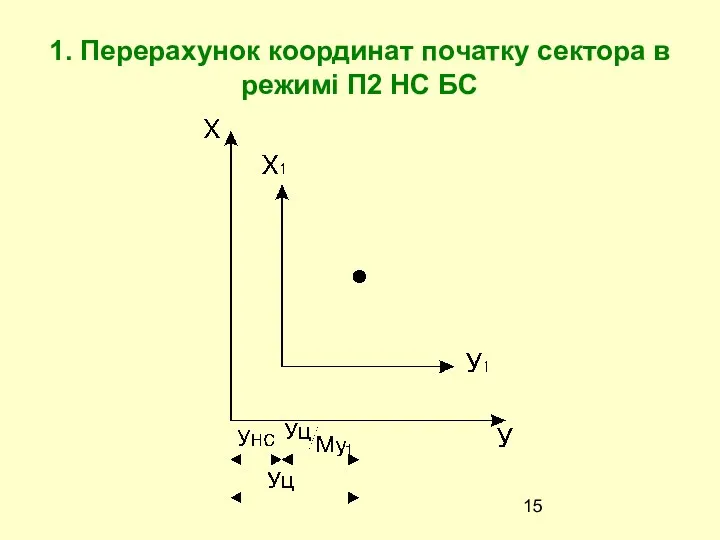
1. Перерахунок координат початку сектора в режимі П2 НС БС
1. Перерахунок координат початку сектора в режимі П2 НС БС
1. Перерахунок координат початку сектора в режимі П2 НС БС
1. Перерахунок координат початку сектора в режимі П2 НС БС
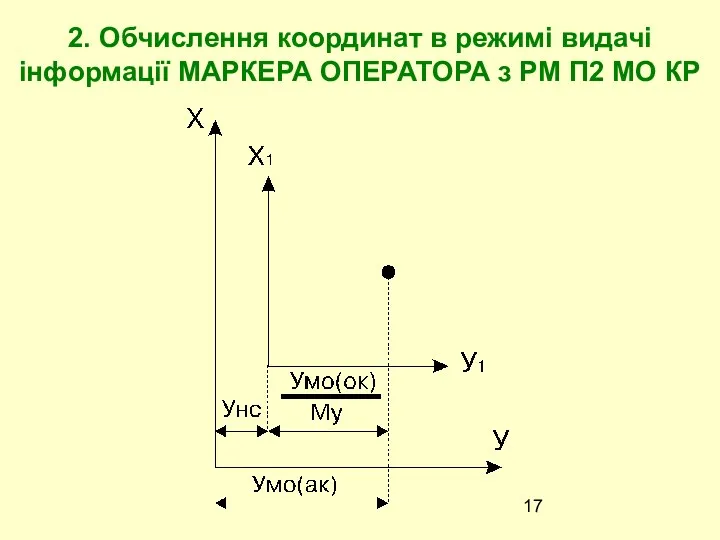
2. Обчислення координат в режимі видачі інформації МАРКЕРА ОПЕРАТОРА з РМ
2. Обчислення координат в режимі видачі інформації МАРКЕРА ОПЕРАТОРА з РМ
2. Обчислення координат в режимі видачі інформації МАРКЕРА ОПЕРАТОРА з РМ
2. Обчислення координат в режимі видачі інформації МАРКЕРА ОПЕРАТОРА з РМ
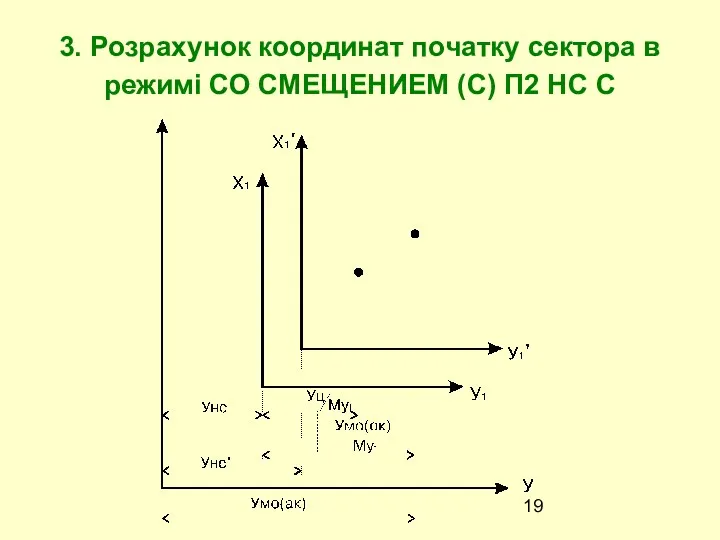
3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П2
3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П2
3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П2
3. Розрахунок координат початку сектора в режимі СО СМЕЩЕНИЕМ (С) П2

4. Перерахунок координат початку сектора в режимі С та БС П2
4. Перерахунок координат початку сектора в режимі С та БС П2
4. Перерахунок координат початку сектора в режимі С та БС П2
4. Перерахунок координат початку сектора в режимі С та БС П2

Запуск програми П2 НС БС
Запуск програми П2 НС БС
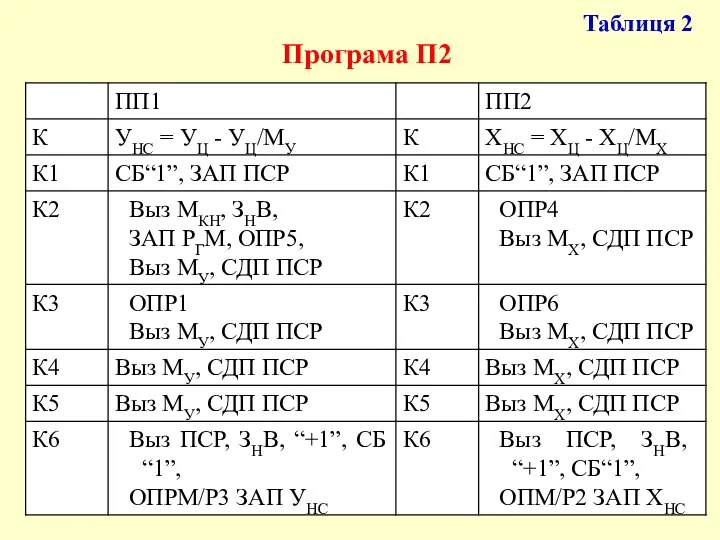
Таблиця 2
Програма П2
Таблиця 2
Програма П2

Перевірка роботи програми П2 (рис.59, с.36)
1. Увімкнути РМ, встановивши на ПРМ
Перевірка роботи програми П2 (рис.59, с.36)
1. Увімкнути РМ, встановивши на ПРМ
 Тема 4: Обязанности лиц суточного наряда. Занятие № 1. Суточный наряд роты и его обязанности
Тема 4: Обязанности лиц суточного наряда. Занятие № 1. Суточный наряд роты и его обязанности Пристрелка и стрельба на поражение целей по НЗР при поправке на смещение менее 5-00
Пристрелка и стрельба на поражение целей по НЗР при поправке на смещение менее 5-00 Система прикриття воєнних об’єктів держави від ударів засобів повітряного нападу
Система прикриття воєнних об’єктів держави від ударів засобів повітряного нападу Прохождение военной службы по контракту
Прохождение военной службы по контракту Защита Отечества
Защита Отечества Презентация к Л12 Т 1 З 2
Презентация к Л12 Т 1 З 2 Цели и задачи технического обеспечения в ВС РФ. Состав сил и средств технического обеспечения воинских частей
Цели и задачи технического обеспечения в ВС РФ. Состав сил и средств технического обеспечения воинских частей Тактика действий подразделений армий иностранных государств в основных видах боя. Иррегулярные вооруженные формирования
Тактика действий подразделений армий иностранных государств в основных видах боя. Иррегулярные вооруженные формирования Дії солдата в обороні та наступі
Дії солдата в обороні та наступі Виды ядерного, химического и биологического оружия. Определение и классификация, способы защиты
Виды ядерного, химического и биологического оружия. Определение и классификация, способы защиты Организация, вооружение и боевая техника мотострелкового (танкового) батальона, артиллерийских подразделений полка
Организация, вооружение и боевая техника мотострелкового (танкового) батальона, артиллерийских подразделений полка Освидетельствование и ввод в эксплуатацию техники связи и АСУ (лекции № 5)
Освидетельствование и ввод в эксплуатацию техники связи и АСУ (лекции № 5) Военная техника
Военная техника Общевоинские уставы Вооруженных Сил Российской Федерации
Общевоинские уставы Вооруженных Сил Российской Федерации Организация и вооружение мотострелкового батальона Вооруженных Сил Республики Казахстан
Организация и вооружение мотострелкового батальона Вооруженных Сил Республики Казахстан ТТХ та призначення гармати МТ-12
ТТХ та призначення гармати МТ-12 Внутренний порядок и суточный наряд. Тема №2
Внутренний порядок и суточный наряд. Тема №2 История создания Вооруженных Сил ПМР. Предназначение, организация и структура
История создания Вооруженных Сил ПМР. Предназначение, организация и структура Сущность, задачи и виды обеспечения боевых действий
Сущность, задачи и виды обеспечения боевых действий Устройство надводного корабля. Военный корабль
Устройство надводного корабля. Военный корабль Военно-воздушные силы РФ
Военно-воздушные силы РФ Силовая установка, её обслуживание и ремонт. Система питания двигателя танка, БМП, БТР-80 топливом. (Тема 7.3)
Силовая установка, её обслуживание и ремонт. Система питания двигателя танка, БМП, БТР-80 топливом. (Тема 7.3) День пограничника
День пограничника Силовая установка, её обслуживание и ремонт
Силовая установка, её обслуживание и ремонт Выбор места для наблюдательного поста, его оборудование и маскировка
Выбор места для наблюдательного поста, его оборудование и маскировка Основы современного общевойскового боя
Основы современного общевойскового боя Военная психология как наука. Роль психологических знаний в деятельности офицера
Военная психология как наука. Роль психологических знаний в деятельности офицера Основы военно-педагогических знаний. Воспитательная работа командира с личным составом. Идеологическая подготовка. (Тема 2.2)
Основы военно-педагогических знаний. Воспитательная работа командира с личным составом. Идеологическая подготовка. (Тема 2.2)