Статистическая теория обнаружения радиолокационных сигналов. Оптимальное решающее правило презентация
- Статистическая теория обнаружения радиолокационных сигналов. Оптимальное решающее правило

Содержание
- 2. ЦЕЛЬ ЛЕКЦИИ Раскрыть содержание задачи оптимизации обнаружения сигналов и метода ее решения. 1
- 3. 1. Постановка задачи оптимального обнаружения радиолокационных сигналов. Показатели качества обнаружения. ВОПРОСЫ ЛЕКЦИИ 2. Статистические критерии оптимизации
- 4. 1.ПОСТАНОВКА ЗАДАЧИ ОПТИМАЛЬНОГО ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ. Показатели качества обнаружения Решение задачи радиолокационного обнаружения сводится к принятию
- 5. При этом задача РЛ обнаружения заключается в выяснении следующего: содержит принимаемое колебание y(t) отраженный сигнал х(t)
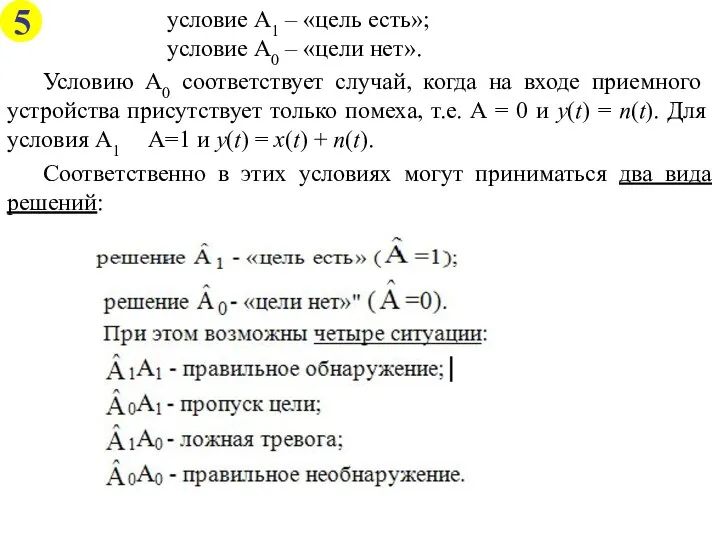
- 6. условие А1 – «цель есть»; условие А0 – «цели нет». Условию А0 соответствует случай, когда на
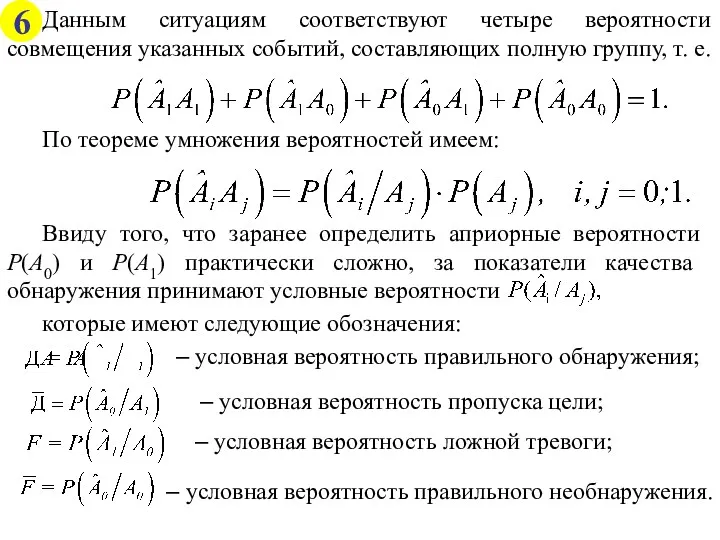
- 7. Данным ситуациям соответствуют четыре вероятности совмещения указанных событий, составляющих полную группу, т. е. По теореме умножения
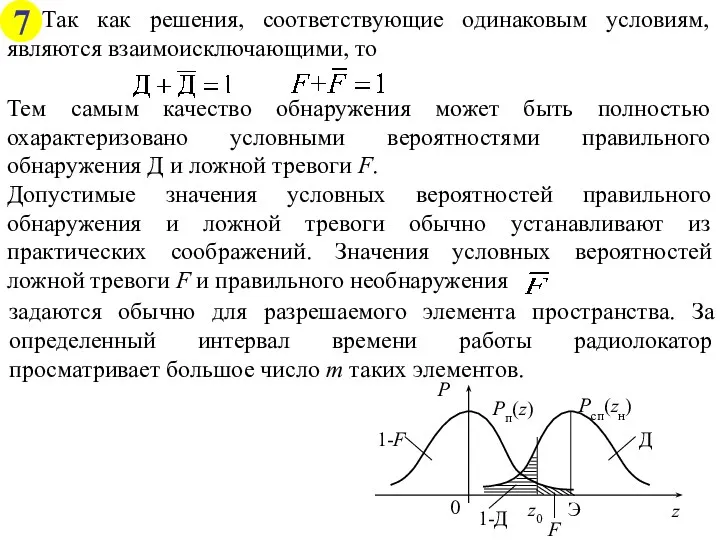
- 8. Допустимые значения условных вероятностей правильного обнаружения и ложной тревоги обычно устанавливают из практических соображений. Значения условных
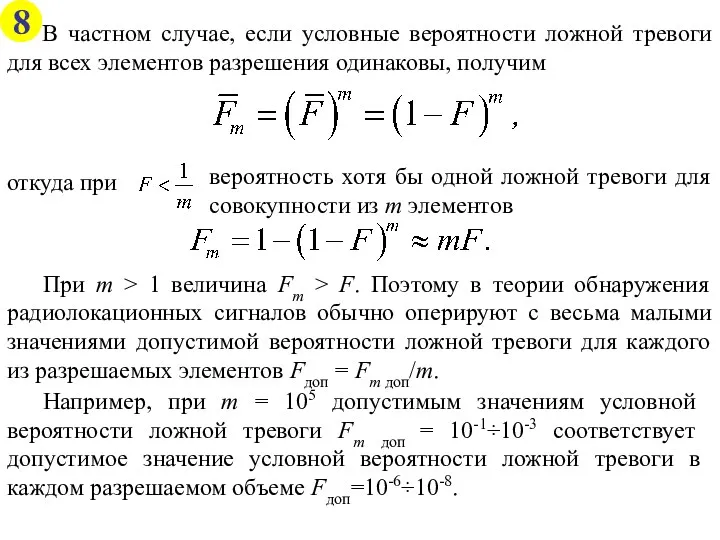
- 9. При m > 1 величина Fm > F. Поэтому в теории обнаружения радиолокационных сигналов обычно оперируют
- 10. Вероятность правильного обнаружения Д стремятся сделать возможно большей, что особенно трудно обеспечить, когда цель находится на
- 11. Критерий – существенный признак по которому производится оценка, определение или классификация чего-либо
- 12. 2. СТАТИСТИЧЕСКИЕ КРИТЕРИИ ОПТИМИЗАЦИИ ОБНАРУЖЕНИЯ СИГНАЛОВ. ОПТИМАЛЬНОЕ РЕШАЮЩЕЕ ПРАВИЛО Учитывая априорные вероятности Р(А0), Р(А1) и введенные
- 13. К выбору порога по весовому критерию Какая ошибка???
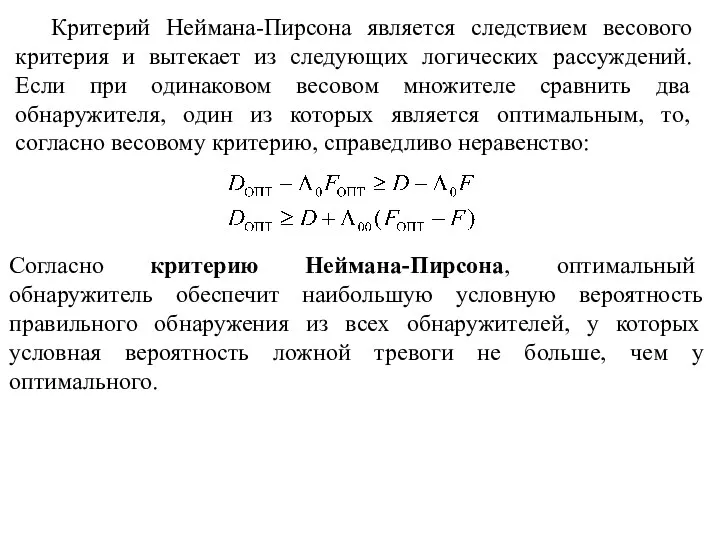
- 14. Критерий Неймана-Пирсона является следствием весового критерия и вытекает из следующих логических рассуждений. Если при одинаковом весовом
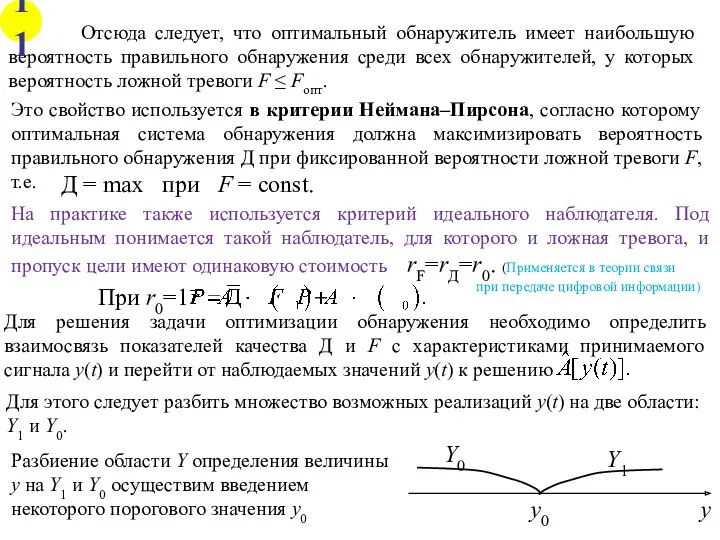
- 15. Отсюда следует, что оптимальный обнаружитель имеет наибольшую вероятность правильного обнаружения среди всех обнаружителей, у которых вероятность
- 16. Чтобы найти оптимальное правило будем полагать, что плотности вероятности распределения помехи pп(y) и смеси «сигнал +
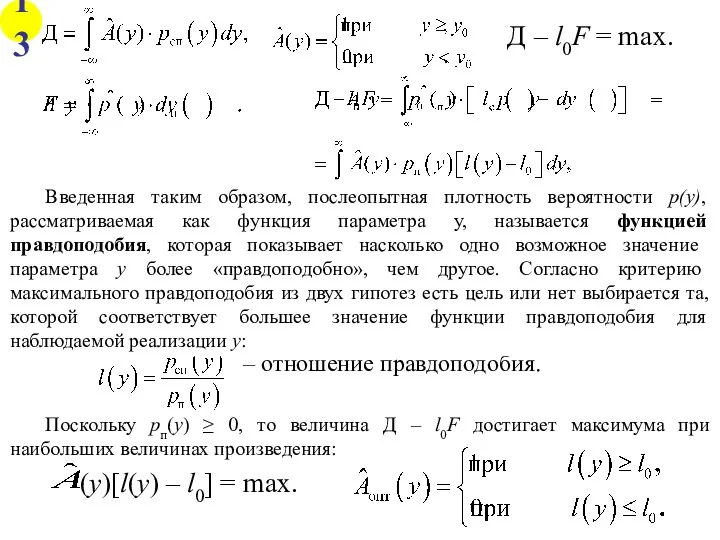
- 17. Д – l0F = max. – отношение правдоподобия. Поскольку pп(y) ≥ 0, то величина Д –
- 18. ВЫВОД Последнее соотношение характеризует критерий отношения правдоподобия. Таким образом, решение о наличии цели принимается в том
- 19. 15
- 21. Скачать презентацию
ЦЕЛЬ ЛЕКЦИИ
Раскрыть содержание задачи оптимизации обнаружения сигналов и метода ее
ЦЕЛЬ ЛЕКЦИИ
Раскрыть содержание задачи оптимизации обнаружения сигналов и метода ее
1. Постановка задачи оптимального обнаружения радиолокационных сигналов. Показатели качества обнаружения.
ВОПРОСЫ
1. Постановка задачи оптимального обнаружения радиолокационных сигналов. Показатели качества обнаружения.
ВОПРОСЫ
1.ПОСТАНОВКА ЗАДАЧИ ОПТИМАЛЬНОГО ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ.
Показатели качества обнаружения
Решение задачи радиолокационного обнаружения
1.ПОСТАНОВКА ЗАДАЧИ ОПТИМАЛЬНОГО ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ.
Показатели качества обнаружения
Решение задачи радиолокационного обнаружения
При этом задача РЛ обнаружения заключается в выяснении следующего: содержит принимаемое
При этом задача РЛ обнаружения заключается в выяснении следующего: содержит принимаемое
условие А1 – «цель есть»;
условие А0 – «цели нет».
Условию
условие А1 – «цель есть»;
условие А0 – «цели нет».
Условию
Данным ситуациям соответствуют четыре вероятности совмещения указанных событий, составляющих полную группу,
Данным ситуациям соответствуют четыре вероятности совмещения указанных событий, составляющих полную группу,
Допустимые значения условных вероятностей правильного обнаружения и ложной тревоги обычно устанавливают
Допустимые значения условных вероятностей правильного обнаружения и ложной тревоги обычно устанавливают
При m > 1 величина Fm > F. Поэтому в теории
При m > 1 величина Fm > F. Поэтому в теории
Вероятность правильного обнаружения Д стремятся сделать возможно большей, что особенно
Вероятность правильного обнаружения Д стремятся сделать возможно большей, что особенно
Критерий – существенный признак по которому производится оценка, определение или классификация
Критерий – существенный признак по которому производится оценка, определение или классификация
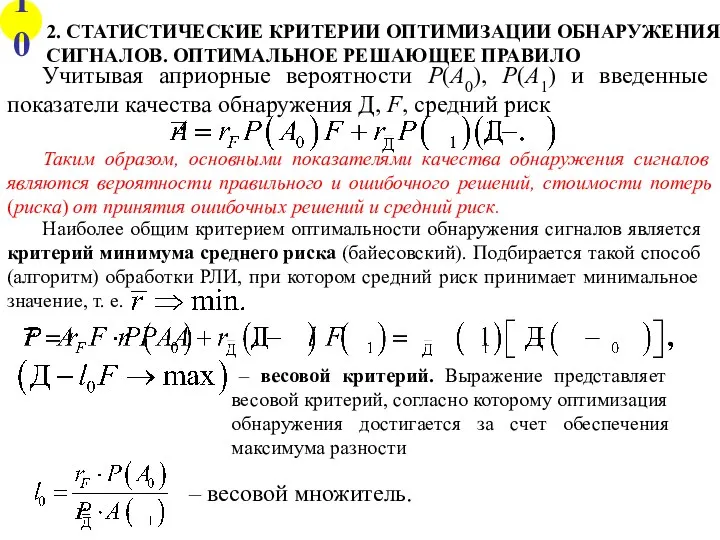
2. СТАТИСТИЧЕСКИЕ КРИТЕРИИ ОПТИМИЗАЦИИ ОБНАРУЖЕНИЯ СИГНАЛОВ. ОПТИМАЛЬНОЕ РЕШАЮЩЕЕ ПРАВИЛО
Учитывая априорные
2. СТАТИСТИЧЕСКИЕ КРИТЕРИИ ОПТИМИЗАЦИИ ОБНАРУЖЕНИЯ СИГНАЛОВ. ОПТИМАЛЬНОЕ РЕШАЮЩЕЕ ПРАВИЛО
Учитывая априорные
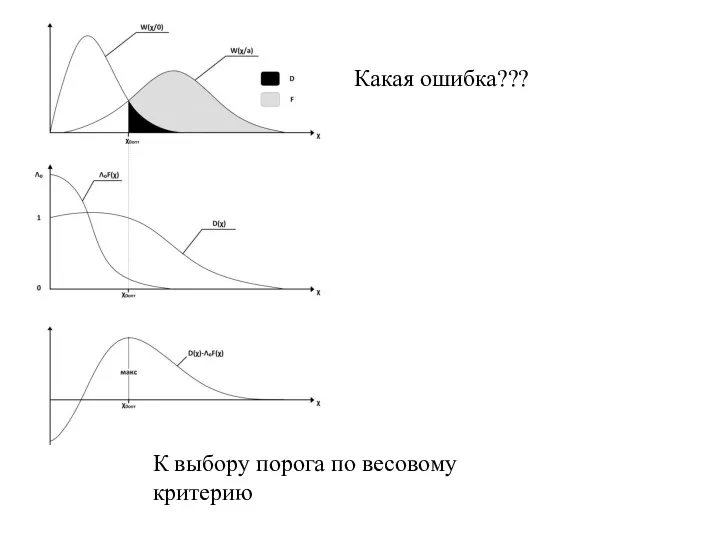
К выбору порога по весовому критерию
Какая ошибка???
К выбору порога по весовому критерию
Какая ошибка???
Критерий Неймана-Пирсона является следствием весового критерия и вытекает из следующих логических
Критерий Неймана-Пирсона является следствием весового критерия и вытекает из следующих логических
Отсюда следует, что оптимальный обнаружитель имеет наибольшую вероятность правильного обнаружения
Отсюда следует, что оптимальный обнаружитель имеет наибольшую вероятность правильного обнаружения
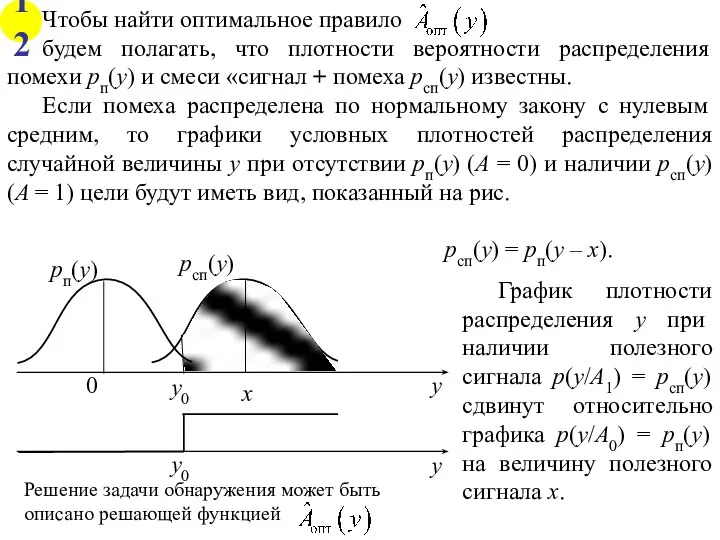
Чтобы найти оптимальное правило
будем полагать, что плотности вероятности распределения помехи
Чтобы найти оптимальное правило
будем полагать, что плотности вероятности распределения помехи
Д – l0F = max.
– отношение правдоподобия.
Поскольку pп(y) ≥
Д – l0F = max.
– отношение правдоподобия.
Поскольку pп(y) ≥
ВЫВОД
Последнее соотношение характеризует критерий отношения правдоподобия.
Таким образом, решение о
ВЫВОД
Последнее соотношение характеризует критерий отношения правдоподобия.
Таким образом, решение о
15
15
 Работа командира подразделения РХБ защиты по управлению подразделениями
Работа командира подразделения РХБ защиты по управлению подразделениями Организация воинского учёта и его предназначение
Организация воинского учёта и его предназначение Вооружение СССР с 1970 по 1991
Вооружение СССР с 1970 по 1991 Распределение времени. Внутренний порядок (занятие № 3)
Распределение времени. Внутренний порядок (занятие № 3) Современные средства поражения. Способы защиты
Современные средства поражения. Способы защиты Состав и организационная структура ВС РФ
Состав и организационная структура ВС РФ Прохождение воинской службы по призыву
Прохождение воинской службы по призыву Управление огнем артиллерии. Метеорологическая подготовка стрельбы
Управление огнем артиллерии. Метеорологическая подготовка стрельбы Символы ВС РФ. Знамена и ритуалы
Символы ВС РФ. Знамена и ритуалы Морская авиация
Морская авиация Перечень структур, в которых предусмотрена военная служба
Перечень структур, в которых предусмотрена военная служба Военнослужащий — патриот, с честью и достоинством несущий звание защитника Отечества
Военнослужащий — патриот, с честью и достоинством несущий звание защитника Отечества Досвід застосування РТВ в локальних конфліктах та АТО (Заняття № 4.6)
Досвід застосування РТВ в локальних конфліктах та АТО (Заняття № 4.6) Введение в военную специальность
Введение в военную специальность Техника военной авиации
Техника военной авиации Военная техника (1941-2019)
Военная техника (1941-2019) Военно-Морской Флот РФ
Военно-Морской Флот РФ Вид боевого обеспечения - охранение
Вид боевого обеспечения - охранение Система охлаждения и подогрева двигателя танка Т-72. (Тема 7.1)
Система охлаждения и подогрева двигателя танка Т-72. (Тема 7.1) Вооружённые силы США
Вооружённые силы США Объединенные вооруженные силы НАТО
Объединенные вооруженные силы НАТО Тема 1. Организация и несение внутренней службы в ВС РФ. Занятие 1. Общевоинские уставы ВС РФ
Тема 1. Организация и несение внутренней службы в ВС РФ. Занятие 1. Общевоинские уставы ВС РФ Символы воинской чести
Символы воинской чести Действия солдата, отделения в бою
Действия солдата, отделения в бою Общевоинские уставы. Устав гарнизонной и караульной служб ВС РФ. (Тема 1.5)
Общевоинские уставы. Устав гарнизонной и караульной служб ВС РФ. (Тема 1.5) Основы организации материального обеспечения войск. (Тема 3.1)
Основы организации материального обеспечения войск. (Тема 3.1) Дезактивация
Дезактивация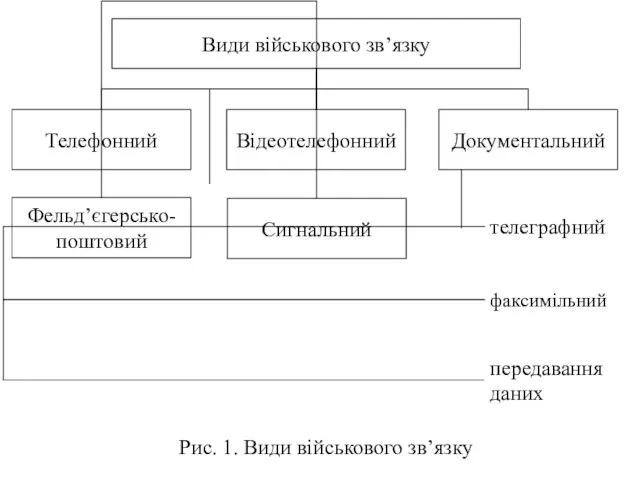 Засоби військового зв’язку
Засоби військового зв’язку