- Топогеодезическая привязка элементов боевых порядков артиллерийских подразделений

Содержание
- 2. ТЕМА 7. Топогеодезическая привязка элементов боевых порядков артиллерийских подразделений. ЗАНЯТИЕ 1 Определение прямоугольных координат позиций и
- 3. Учебные цели: В результате изучения темы студенты должны: Знать: способы определения прямоугольных координат при топогеодезический привязке
- 4. 1-й Вопрос. Способы определения прямоугольных координат при топогеодезический привязке по карте.
- 5. При определении координат привязываемых точек по карте (аэроснимку) с помощью приборов в зависимости от условий наблюдения,
- 6. 2-й Вопрос. Определение прямоугольных координат ОП (КНП) полярным способом, его сущность и условия применения.
- 7. Полярный способ определения координат применяется тогда, когда имеется прямая видимость между привязываемой и исходной точками. Сущность
- 8. Дирекционный угол с исходной точки на привязываемую определяют с помощью магнитной стрелки буссоли, гирокурсоуказателя навигационной аппаратуры,
- 9. Прямая геодезическая задача (полярный способ) ΔХ = Д х cos αкт-оп ΔУ = Д х sin
- 10. 3 45,3 10-2 15 8(12) А р. Соть оз. Щучье Рябиновка 45 45,3 контурная точка огневая
- 11. 3 45,3 10-2 15 8(12) А р. Соть оз. Щучье 45,3 огневая позиция контурная точка ПАБ-2А
- 12. Определить расстояние, если, β=12-72, Б=76м. Решение: γ=15-00 – 12-72 = 2-28 2-20 8 Для Б=10м Д=41м
- 13. Пример Решение ΔХ= 1370 х cos 43-27= 1370 х( – 0,180) = - 247 ΔУ= 1370
- 14. Пример Решение ΔХ= 740 х cos 34-63= 740 х -0,885 = - 665 ΔУ= 740 х
- 15. α‘ = 34-49 Д = 360 КТ Хоп = Хкт + ∆Х Уоп = Укт +
- 16. 3-й Вопрос. Определение прямоугольных координат ОП (КНП) ходом в 2-3 стороны, его сущность и условия применения.
- 17. При определении координат точек по карте в условиях закрытой или полузакрытой местности применяют разомкнутый или висячий
- 18. Полевые работы при прокладке любого хода заключаются в измерении углов между сторонами хода или в непосредственном
- 19. промежуточная точка α1 α2 Ход в две стороны контурная точка огневая позиция Хоп = Хкт +
- 20. α2 α3 α1′ Висячий ход. КТ (Хкт, Укт) 1 2 ОП α2′ α1 Хп = Хп-1
- 22. 4. Засечки.
- 23. Обратная засечка по дирекционным углам Работа на местности α 1= α 2= α 3=
- 24. 3 45,3 10-2 15 8(12) А гл. 3 р. Соть оз. Щучье 78,3 Рябиновка 45 Ель
- 25. А (ХА,УА) В (ХВ,УВ) С (ХС ,УС) Р α3 α2 α1 Р Определяем угол Р, Р
- 26. Обратная засечка не ориентированным прибором (способ Болотова) Работа на местности α β
- 27. α β Обратная засечка не ориентированным прибором (способ Болотова) Подготовка кальки к работе
- 28. 3 45,3 10-2 15 8(12) А гл. 3 р. Соть оз. Щучье 78,3 Рябиновка 45 Ель
- 29. Обратная засечка по измеренным расстояниям Работа на местности Д1 Д2 Д3
- 30. Порядок откладывания расстояния с помощью поперечного масштаба 2 4 8 2 4 6 8 0 6
- 31. 3 45,3 10-2 15 8(12) А гл. 3 р. Соть оз. Щучье 78,3 Рябиновка 45 Ель
- 33. Скачать презентацию
ТЕМА 7. Топогеодезическая привязка элементов боевых порядков артиллерийских подразделений.
ЗАНЯТИЕ 1 Определение
ТЕМА 7. Топогеодезическая привязка элементов боевых порядков артиллерийских подразделений.
ЗАНЯТИЕ 1 Определение
Учебные цели:
В результате изучения темы студенты должны:
Знать:
способы определения прямоугольных координат
Учебные цели:
В результате изучения темы студенты должны:
Знать:
способы определения прямоугольных координат
1-й Вопрос. Способы определения прямоугольных координат при топогеодезический привязке по карте.
1-й Вопрос. Способы определения прямоугольных координат при топогеодезический привязке по карте.
При определении координат привязываемых точек по карте (аэроснимку) с помощью приборов
При определении координат привязываемых точек по карте (аэроснимку) с помощью приборов
2-й Вопрос. Определение прямоугольных координат ОП (КНП) полярным способом, его сущность
2-й Вопрос. Определение прямоугольных координат ОП (КНП) полярным способом, его сущность
Полярный способ определения координат применяется тогда, когда имеется прямая видимость между
Полярный способ определения координат применяется тогда, когда имеется прямая видимость между
Дирекционный угол с исходной точки на привязываемую определяют с помощью магнитной
Дирекционный угол с исходной точки на привязываемую определяют с помощью магнитной
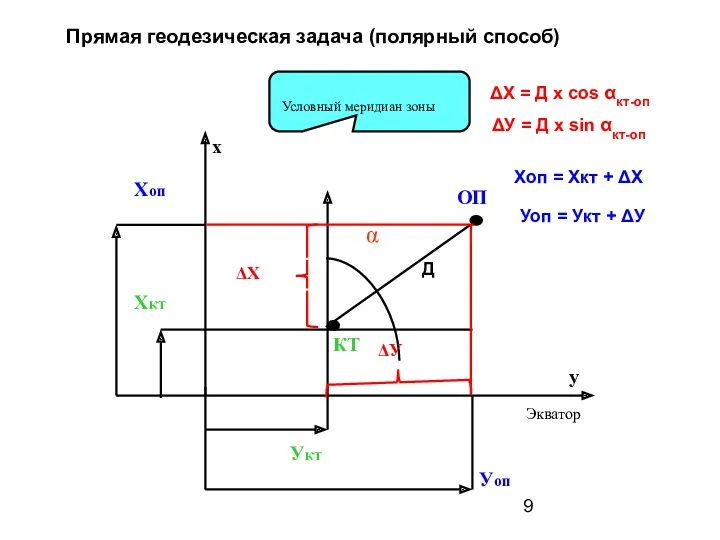
Прямая геодезическая задача (полярный способ)
ΔХ = Д х cos αкт-оп
ΔУ =
Прямая геодезическая задача (полярный способ)
ΔХ = Д х cos αкт-оп
ΔУ =

3
45,3
10-2
15
8(12) А
р. Соть
оз. Щучье
Рябиновка
45
45,3
контурная
точка
огневая
позиция
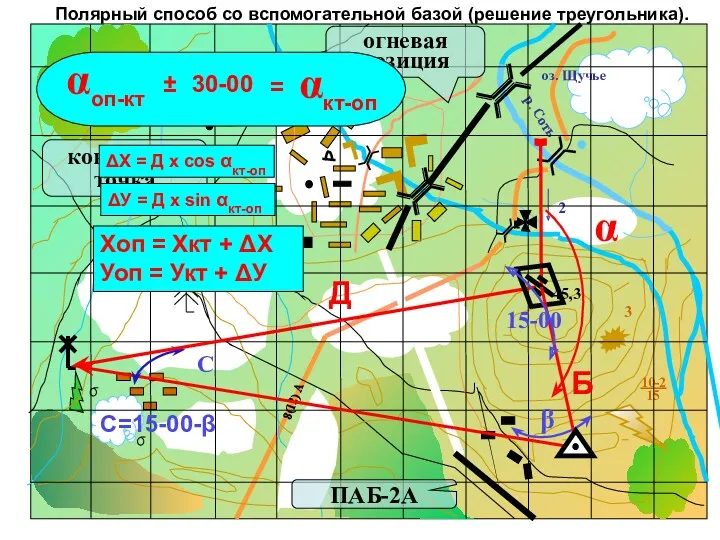
αоп-кт
αкт-оп
Хоп = Хкт + ΔХ
Уоп = Укт +
3
45,3
10-2
15
8(12) А
р. Соть
оз. Щучье
Рябиновка
45
45,3
контурная
точка
огневая
позиция
αоп-кт
αкт-оп
Хоп = Хкт + ΔХ
Уоп = Укт +
3
45,3
10-2
15
8(12) А
р. Соть
оз. Щучье
45,3
огневая
позиция
контурная
точка
ПАБ-2А
Полярный способ со вспомогательной базой (решение треугольника).
С=15-00-β
Хоп =
3
45,3
10-2
15
8(12) А
р. Соть
оз. Щучье
45,3
огневая
позиция
контурная
точка
ПАБ-2А
Полярный способ со вспомогательной базой (решение треугольника).
С=15-00-β
Хоп =
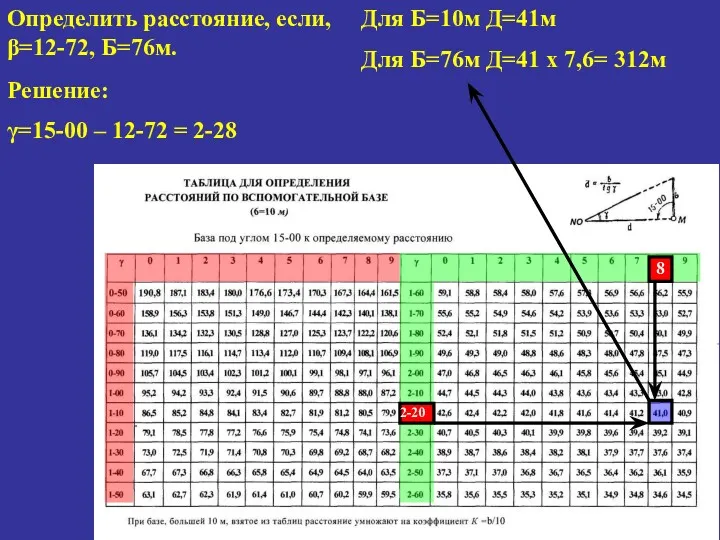
Определить расстояние, если, β=12-72, Б=76м.
Решение:
γ=15-00 – 12-72 = 2-28
2-20
8
Для Б=10м Д=41м
Для
Определить расстояние, если, β=12-72, Б=76м.
Решение:
γ=15-00 – 12-72 = 2-28
2-20
8
Для Б=10м Д=41м
Для
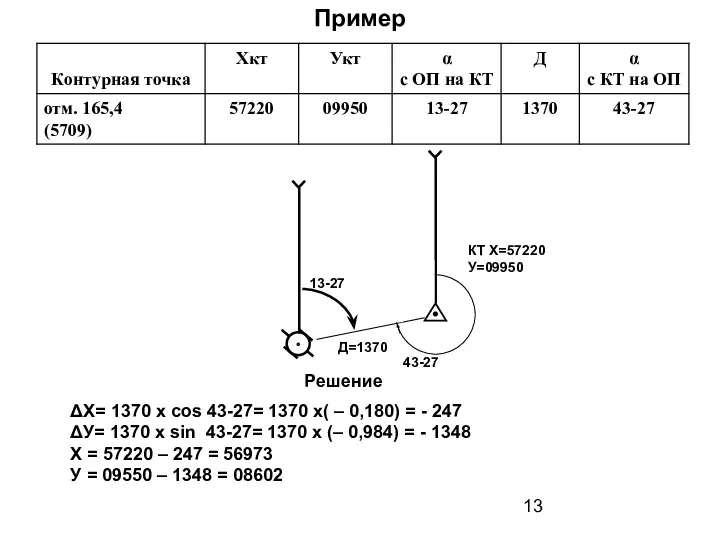
Пример
Решение
ΔХ= 1370 х cos 43-27= 1370 х( – 0,180) =
Пример
Решение
ΔХ= 1370 х cos 43-27= 1370 х( – 0,180) =
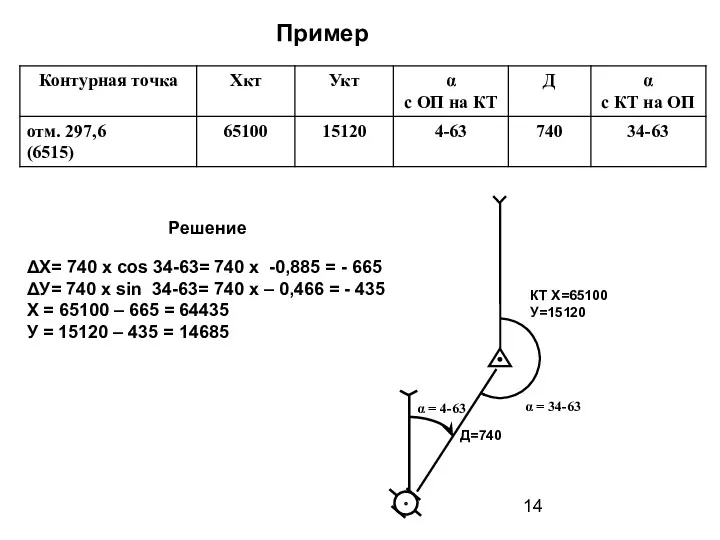
Пример
Решение
ΔХ= 740 х cos 34-63= 740 х -0,885 = -
Пример
Решение
ΔХ= 740 х cos 34-63= 740 х -0,885 = -
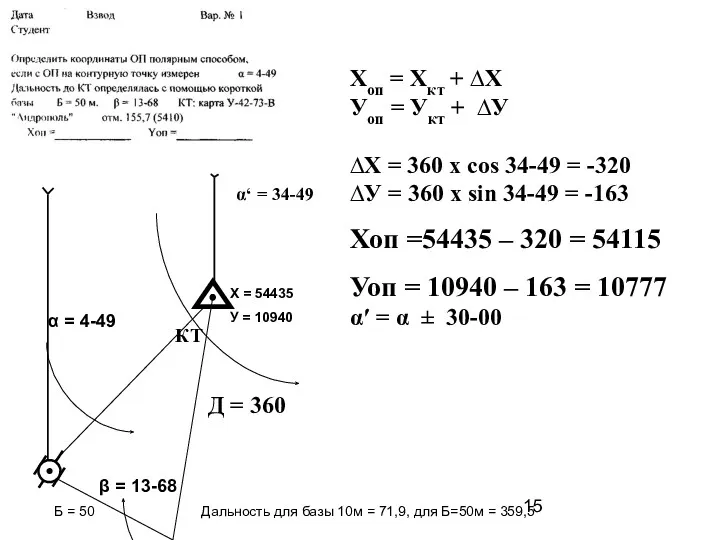
α‘ = 34-49
Д = 360
КТ
Хоп = Хкт + ∆Х
Уоп =
α‘ = 34-49
Д = 360
КТ
Хоп = Хкт + ∆Х
Уоп =
3-й Вопрос. Определение прямоугольных координат ОП (КНП) ходом в 2-3 стороны,
3-й Вопрос. Определение прямоугольных координат ОП (КНП) ходом в 2-3 стороны,
При определении координат точек по карте в условиях закрытой или полузакрытой
При определении координат точек по карте в условиях закрытой или полузакрытой
Полевые работы при прокладке любого хода заключаются в измерении углов между
Полевые работы при прокладке любого хода заключаются в измерении углов между

промежуточная
точка
α1
α2
Ход в две стороны
контурная
точка
огневая
позиция
Хоп = Хкт + ΔХ1 + ΔХ2
промежуточная
точка
α1
α2
Ход в две стороны
контурная
точка
огневая
позиция
Хоп = Хкт + ΔХ1 + ΔХ2
α2
α3
α1′
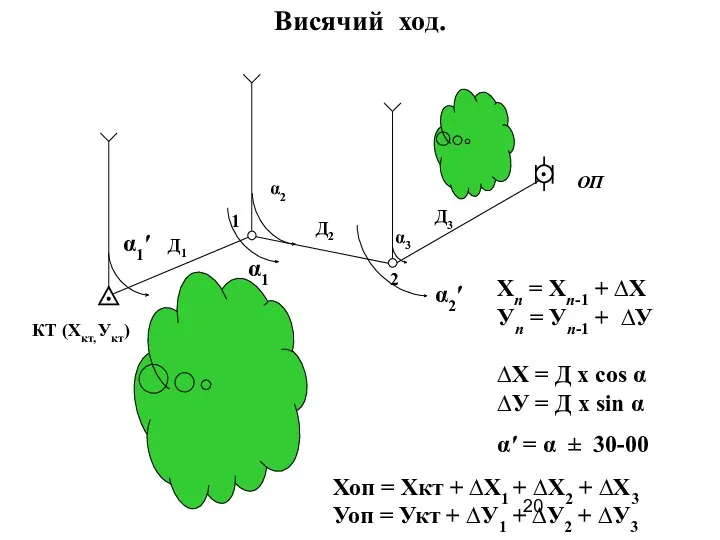
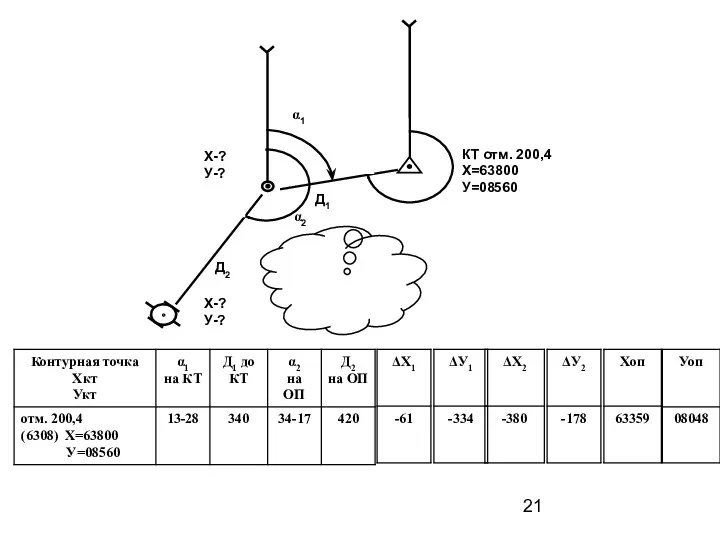
Висячий ход.
КТ (Хкт, Укт)
1
2
ОП
α2′
α1
Хп = Хп-1 + ∆Х
Уп = Уп-1 +
α2
α3
α1′
Висячий ход.
КТ (Хкт, Укт)
1
2
ОП
α2′
α1
Хп = Хп-1 + ∆Х
Уп = Уп-1 +
4. Засечки.
4. Засечки.

Обратная засечка по дирекционным углам
Работа на местности
α 1=
α 2=
α 3=
Обратная засечка по дирекционным углам
Работа на местности
α 1=
α 2=
α 3=

3
45,3
10-2
15
8(12) А
гл. 3
р. Соть
оз. Щучье
78,3
Рябиновка
45
Ель 25-4
0,5
Бугры
свх. Заря
45,3
Обратная засечка по дирекционным
3
45,3
10-2
15
8(12) А
гл. 3
р. Соть
оз. Щучье
78,3
Рябиновка
45
Ель 25-4
0,5
Бугры
свх. Заря
45,3
Обратная засечка по дирекционным
А (ХА,УА)
В (ХВ,УВ)
С (ХС ,УС)
Р
α3
α2
α1
Р
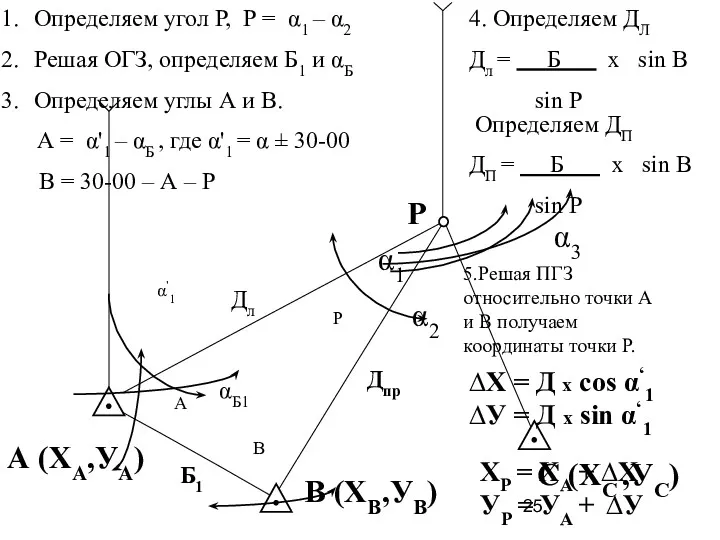
Определяем угол Р, Р = α1 –
А (ХА,УА)
В (ХВ,УВ)
С (ХС ,УС)
Р
α3
α2
α1
Р
Определяем угол Р, Р = α1 –
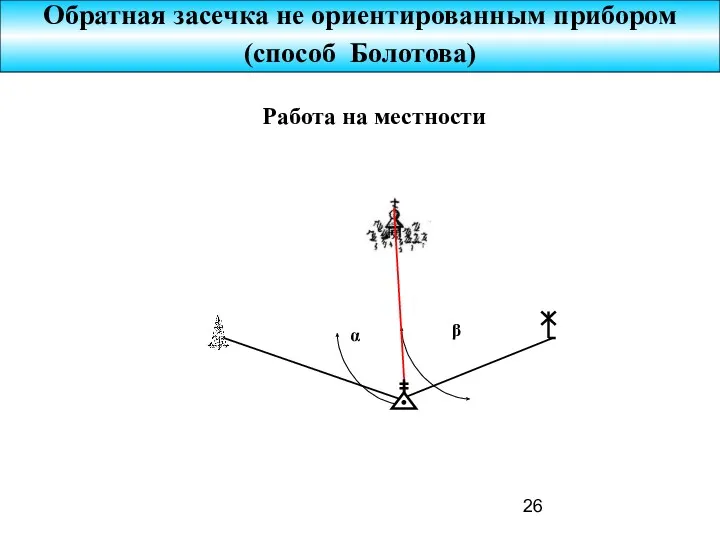
Обратная засечка не ориентированным прибором
(способ Болотова)
Работа на местности
α
β
Обратная засечка не ориентированным прибором
(способ Болотова)
Работа на местности
α
β

α
β
Обратная засечка не ориентированным прибором
(способ Болотова)
Подготовка кальки к работе
α
β
Обратная засечка не ориентированным прибором
(способ Болотова)
Подготовка кальки к работе

3
45,3
10-2
15
8(12) А
гл. 3
р. Соть
оз. Щучье
78,3
Рябиновка
45
Ель 25-4
0,5
Бугры
свх. Заря
45,3
Работа с картой
Обратная засечка
3
45,3
10-2
15
8(12) А
гл. 3
р. Соть
оз. Щучье
78,3
Рябиновка
45
Ель 25-4
0,5
Бугры
свх. Заря
45,3
Работа с картой
Обратная засечка
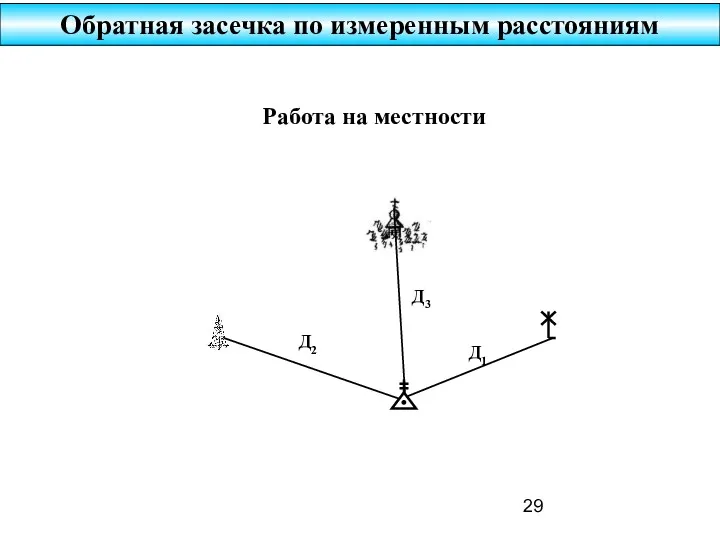
Обратная засечка по измеренным расстояниям
Работа на местности
Д1
Д2
Д3
Обратная засечка по измеренным расстояниям
Работа на местности
Д1
Д2
Д3
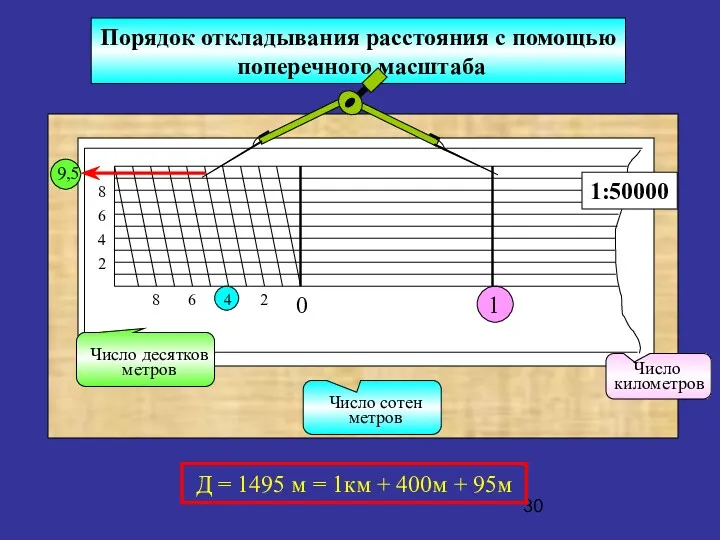
Порядок откладывания расстояния с помощью
поперечного масштаба
2
4
8
2
4
6
8
0
6
1:50000
Д = 1495 м =
Порядок откладывания расстояния с помощью
поперечного масштаба
2
4
8
2
4
6
8
0
6
1:50000
Д = 1495 м =

3
45,3
10-2
15
8(12) А
гл. 3
р. Соть
оз. Щучье
78,3
Рябиновка
45
Ель 25-4
0,5
Бугры
свх. Заря
45,3
Обратная засечка по измеренным
3
45,3
10-2
15
8(12) А
гл. 3
р. Соть
оз. Щучье
78,3
Рябиновка
45
Ель 25-4
0,5
Бугры
свх. Заря
45,3
Обратная засечка по измеренным
 Ядерний вибух та ядерна зброя
Ядерний вибух та ядерна зброя Зміст навчальних питань. Топографічні мапи та умовні топографічні знаки
Зміст навчальних питань. Топографічні мапи та умовні топографічні знаки Действия солдата в разведке. Разведывательная подготовка
Действия солдата в разведке. Разведывательная подготовка Общевоинские уставы, их основные требования и содержание
Общевоинские уставы, их основные требования и содержание Задачи Вооруженных Сил Российской Федерации
Задачи Вооруженных Сил Российской Федерации Нормативно-правовые основы мобилизационной подготовки здравоохранения
Нормативно-правовые основы мобилизационной подготовки здравоохранения Общие принципы построения боевых порядков частей ПВО и базирования авиационных частей. (Тема 3.1)
Общие принципы построения боевых порядков частей ПВО и базирования авиационных частей. (Тема 3.1) Размещение военнослужащих (занятие № 1)
Размещение военнослужащих (занятие № 1) Устройство боевого ручного оружия и обращение с ним. Огнестрельное оружие, состоящее на вооружении ОВД. Пистолеты. (Тема 6)
Устройство боевого ручного оружия и обращение с ним. Огнестрельное оружие, состоящее на вооружении ОВД. Пистолеты. (Тема 6) Основы организации санитарно-гигиенического и противоэпидемического надзора за питанием и водоснабжением войск
Основы организации санитарно-гигиенического и противоэпидемического надзора за питанием и водоснабжением войск Воздушно-десантные войска РФ
Воздушно-десантные войска РФ Радиационная, химическая и биологическая защита
Радиационная, химическая и биологическая защита Оптико - электронное подавление систем управления оружием (лекция 10)
Оптико - электронное подавление систем управления оружием (лекция 10) Разведывательная подготовка. Действия в разведке
Разведывательная подготовка. Действия в разведке Общевоинские уставы. Караульная служба
Общевоинские уставы. Караульная служба Военная присяга
Военная присяга Мінна безпека
Мінна безпека Законодательство РК о воинской службе. Отбор на воинскую службу по контракту
Законодательство РК о воинской службе. Отбор на воинскую службу по контракту Морская авиация
Морская авиация Сухопутные войска
Сухопутные войска Общее устройство, тактикотехнические характеристики базы буксируемых артиллерийских орудий и орудий противотанковой артиллерии
Общее устройство, тактикотехнические характеристики базы буксируемых артиллерийских орудий и орудий противотанковой артиллерии Химическое оружие: дефиниции; классификация; клиника, этапная организация медицинской помощи; СИЗ и санобработка
Химическое оружие: дефиниции; классификация; клиника, этапная организация медицинской помощи; СИЗ и санобработка Строевые приёмы и движения без оружия
Строевые приёмы и движения без оружия Tactical Combat. Casualty Care For Medical Personnel
Tactical Combat. Casualty Care For Medical Personnel Передающее устройство РЛС 35Н6
Передающее устройство РЛС 35Н6 Боевые свойства и поражающее действие ядерного, химического, биологического оружия, средства и способы защиты от них
Боевые свойства и поражающее действие ядерного, химического, биологического оружия, средства и способы защиты от них Основы инженерного обеспечения в роте (взводе). Инженерные заграждения
Основы инженерного обеспечения в роте (взводе). Инженерные заграждения Криминалистическое исследование взрывных устройств, взрывных веществ и следов их применения
Криминалистическое исследование взрывных устройств, взрывных веществ и следов их применения