Заняття 2. Лекція 2. Моделювання як процес дослідження систем управління спеціального призначення презентация
- Заняття 2. Лекція 2. Моделювання як процес дослідження систем управління спеціального призначення

Содержание
- 2. МОДЕЛЮВАННЯ ЯК ПРОЦЕС ДОСЛІДЖЕННЯ СИСТЕМ УПРАВЛІННЯ СПЕЦІАЛЬНОГО ПРИЗНАЧЕННЯ Заняття 2 / Лекція 2. Введення 1. Роль
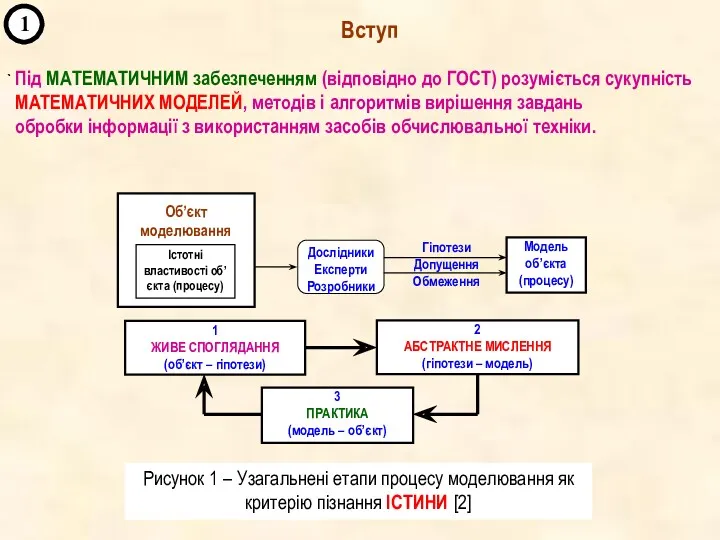
- 3. ` 1 Вступ Під МАТЕМАТИЧНИМ забезпеченням (відповідно до ГОСТ) розуміється сукупність МАТЕМАТИЧНИХ МОДЕЛЕЙ, методів і алгоритмів
- 4. ` 2 1. Роль і місце моделювання в дослідженнях систем управління силами (військами) і засобами (зброєю)
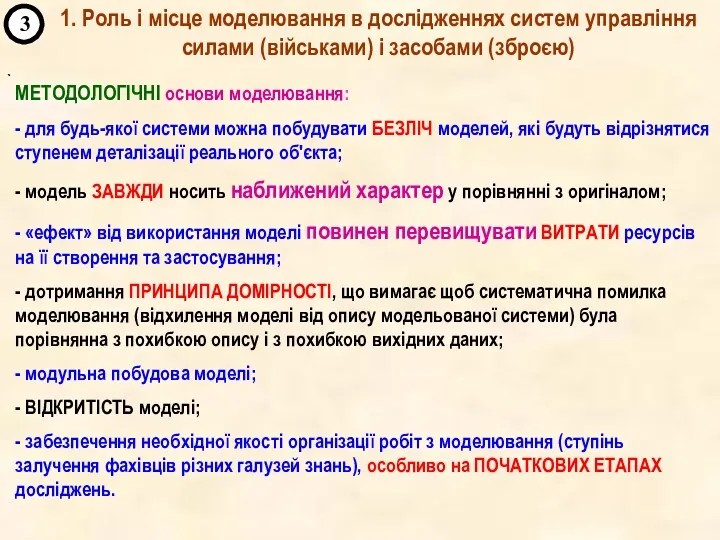
- 5. ` 3 МЕТОДОЛОГІЧНІ основи моделювання: - для будь-якої системи можна побудувати БЕЗЛІЧ моделей, які будуть відрізнятися
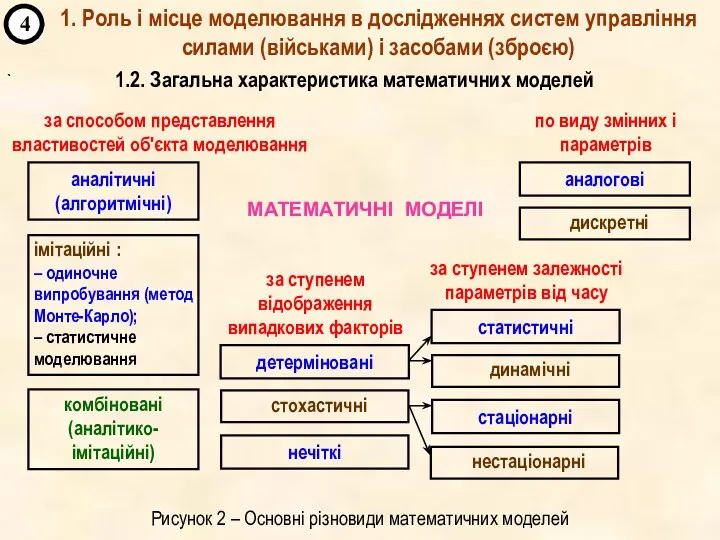
- 6. ` 4 аналітичні (алгоритмічні) імітаційні : – одиночне випробування (метод Монте-Карло); – статистичне моделювання комбіновані (аналітико-імітаційні)
- 7. ` 5 По ряду інших класифікаційних ознак розрізняють МАТЕМАТИЧНІ МОДЕЛІ: - лінійні і нелінійні моделі; -
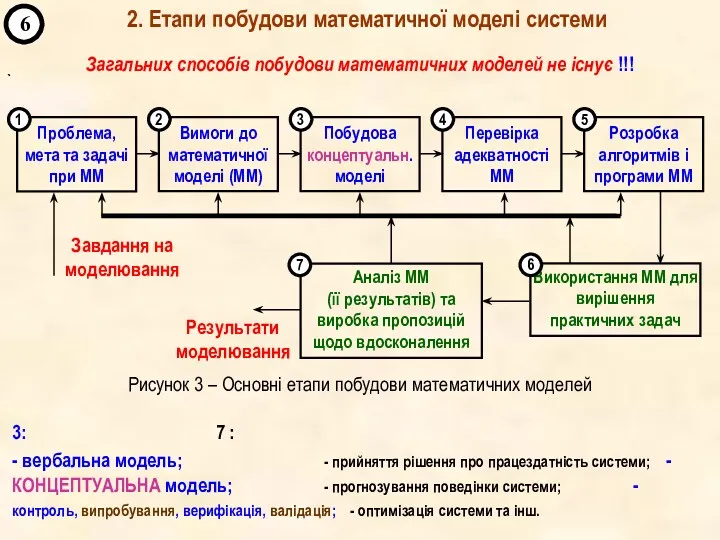
- 8. ` 6 2. Етапи побудови математичної моделі системи 3: 7 : - вербальна модель; - прийняття
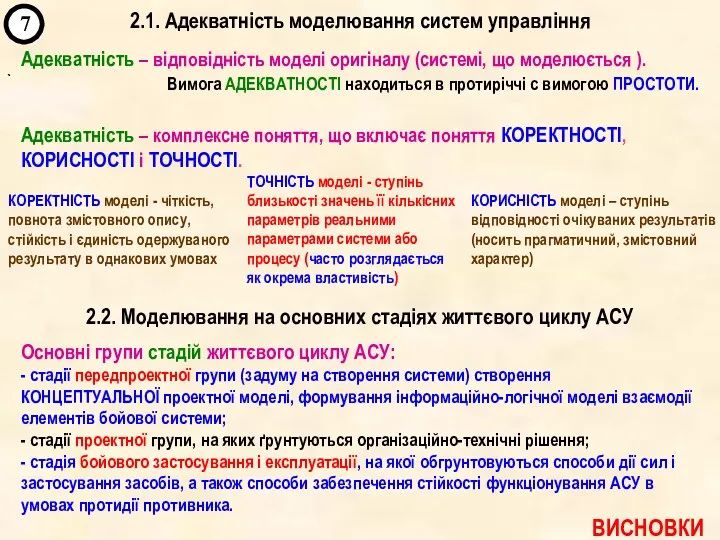
- 9. ` 7 Адекватність – відповідність моделі оригіналу (системі, що моделюється ). Адекватність – комплексне поняття, що
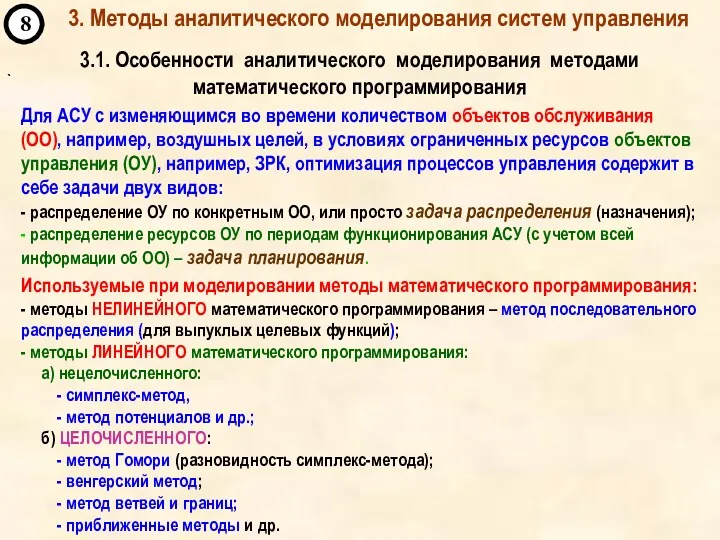
- 10. ` Для АСУ с изменяющимся во времени количеством объектов обслуживания (ОО), например, воздушных целей, в условиях
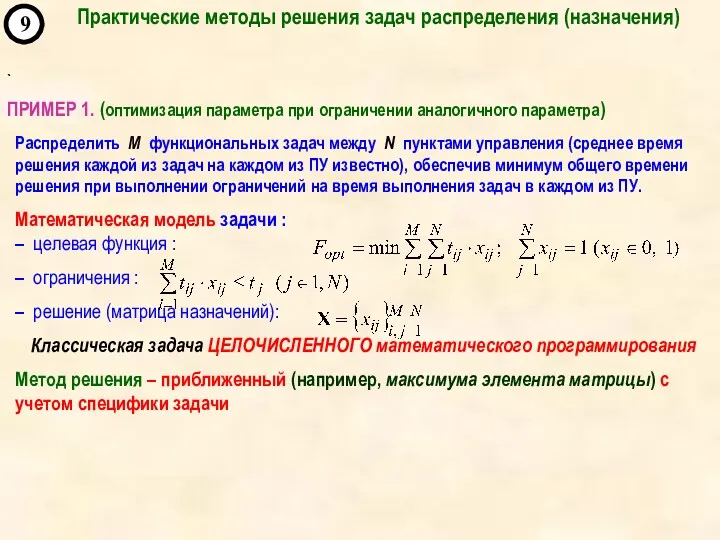
- 11. ` 9 ПРИМЕР 1. (оптимизация параметра при ограничении аналогичного параметра) Распределить M функциональных задач между N
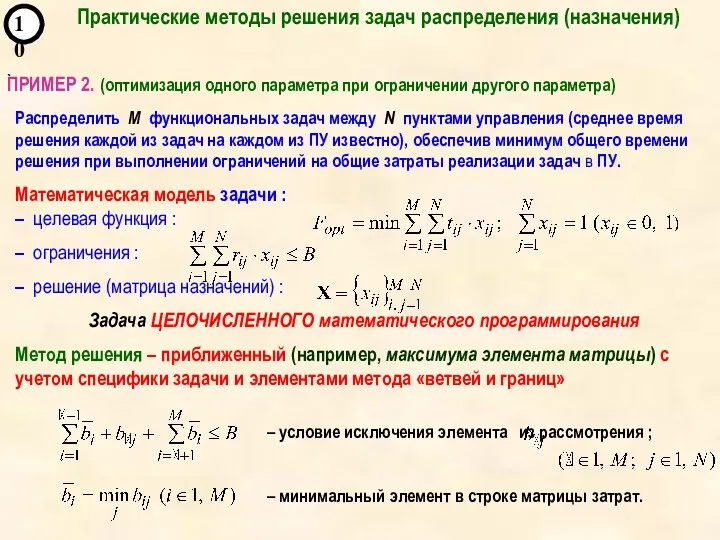
- 12. ` 10 ПРИМЕР 2. (оптимизация одного параметра при ограничении другого параметра) Распределить M функциональных задач между
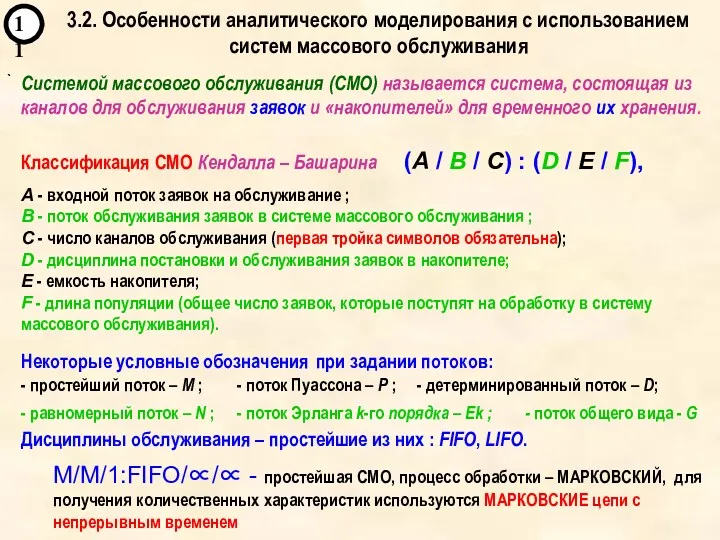
- 13. ` 11 Классификация СМО Кендалла – Башарина (A / B / С) : (D / E
- 14. ` 12 Примеры использования МАРКОВСКИХ ЦЕПЕЙ при моделировании: - организация обстрела воздушных целей ЗРК. Каждое состояние
- 15. ` 12’ Марковский процесс с дискретными состояниями и непрерывным временем называется марковской цепью с непрерывным временем
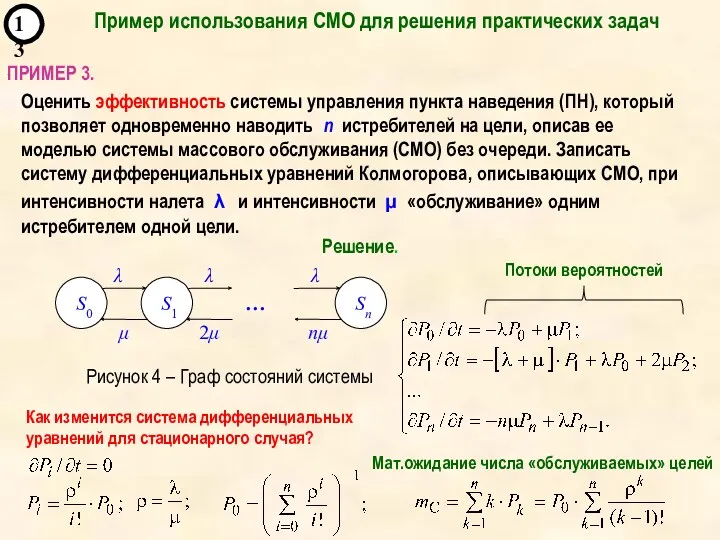
- 16. ` 13 Оценить эффективность системы управления пункта наведения (ПН), который позволяет одновременно наводить n истребителей на
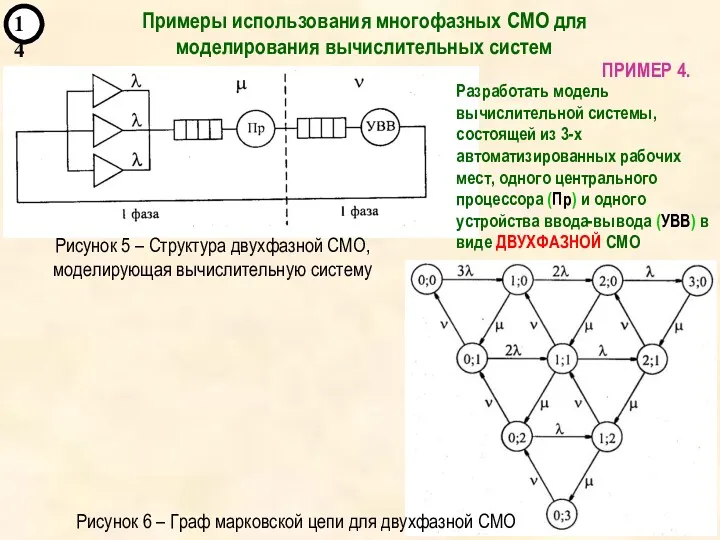
- 17. ` Примеры использования многофазных СМО для моделирования вычислительных систем 14 Разработать модель вычислительной системы, состоящей из
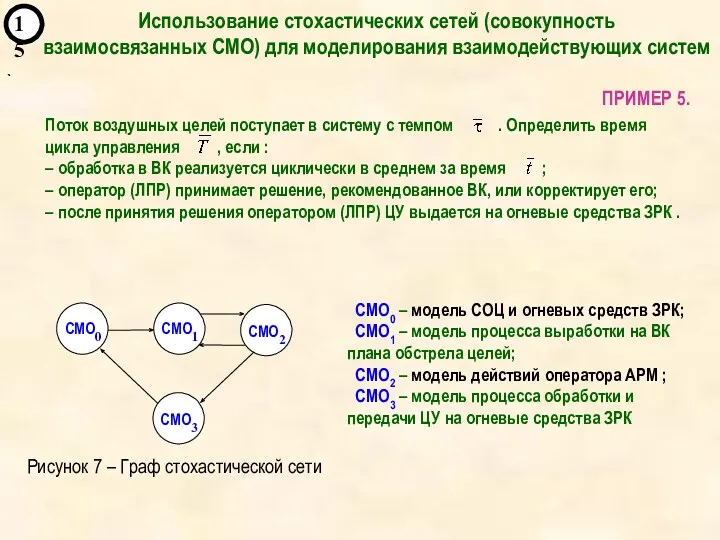
- 18. ` Использование стохастических сетей (совокупность взаимосвязанных СМО) для моделирования взаимодействующих систем 15 Поток воздушных целей поступает
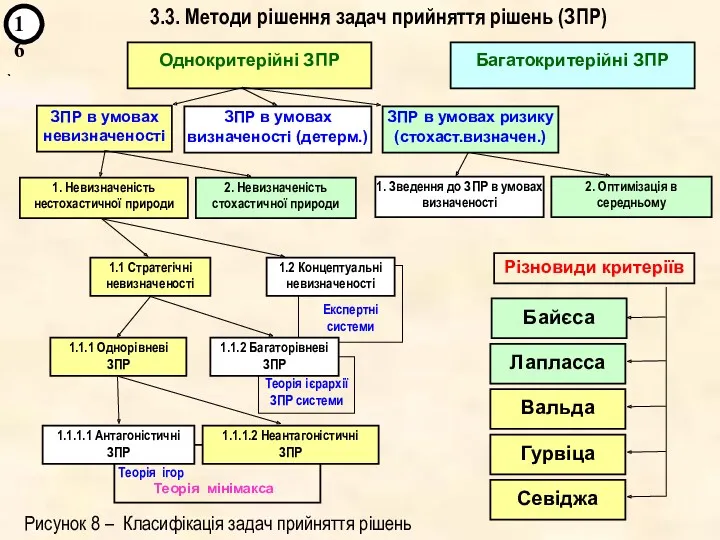
- 19. ` 16 3.3. Методи рішення задач прийняття рішень (ЗПР) Рисунок 8 – Класифікація задач прийняття рішень
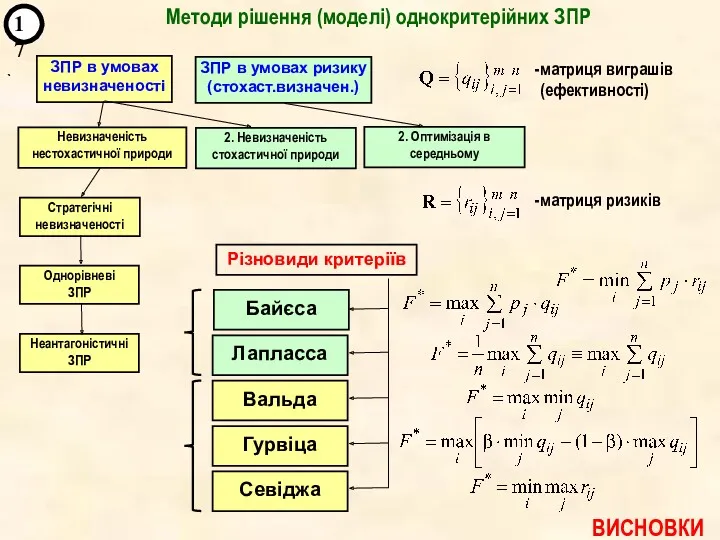
- 20. ` 17 Байєса Різновиди критеріїв Лапласса Вальда Гурвіца Севіджа ЗПР в умовах невизначеності 2. Невизначеність стохастичної
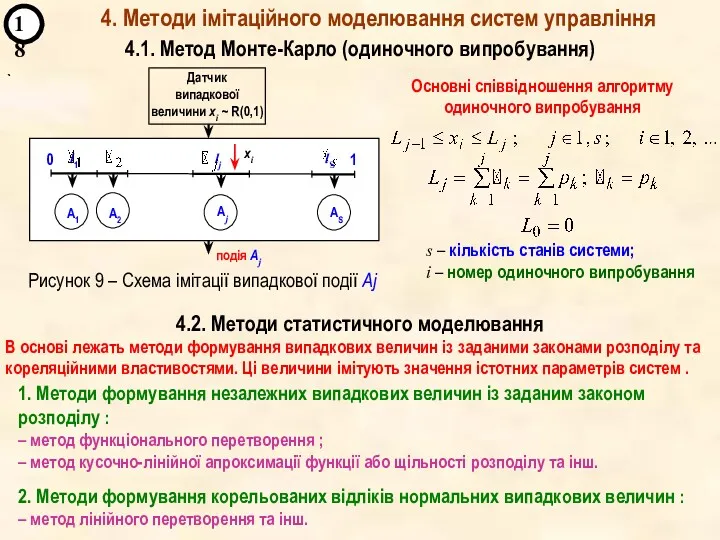
- 21. ` 4. Методи імітаційного моделювання систем управління 18 4.1. Метод Монте-Карло (одиночного випробування) 4.2. Методи статистичного
- 23. Скачать презентацию
МОДЕЛЮВАННЯ ЯК ПРОЦЕС ДОСЛІДЖЕННЯ СИСТЕМ УПРАВЛІННЯ СПЕЦІАЛЬНОГО ПРИЗНАЧЕННЯ
Заняття 2 / Лекція
МОДЕЛЮВАННЯ ЯК ПРОЦЕС ДОСЛІДЖЕННЯ СИСТЕМ УПРАВЛІННЯ СПЕЦІАЛЬНОГО ПРИЗНАЧЕННЯ
Заняття 2 / Лекція
`
1
Вступ
Під МАТЕМАТИЧНИМ забезпеченням (відповідно до ГОСТ) розуміється сукупність
`
1
Вступ
Під МАТЕМАТИЧНИМ забезпеченням (відповідно до ГОСТ) розуміється сукупність
`
2
1. Роль і місце моделювання в дослідженнях систем управління
`
2
1. Роль і місце моделювання в дослідженнях систем управління
`
3
МЕТОДОЛОГІЧНІ основи моделювання:
- для будь-якої системи можна побудувати
`
3
МЕТОДОЛОГІЧНІ основи моделювання:
- для будь-якої системи можна побудувати
`
4
аналітичні (алгоритмічні)
імітаційні :
– одиночне випробування (метод Монте-Карло);
– статистичне моделювання
комбіновані
`
4
аналітичні (алгоритмічні)
імітаційні :
– одиночне випробування (метод Монте-Карло);
– статистичне моделювання
комбіновані
`
5
По ряду інших класифікаційних ознак розрізняють МАТЕМАТИЧНІ МОДЕЛІ:
-
`
5
По ряду інших класифікаційних ознак розрізняють МАТЕМАТИЧНІ МОДЕЛІ: -
`
6
2. Етапи побудови математичної моделі системи
3: 7 :
-
`
6
2. Етапи побудови математичної моделі системи
3: 7 : -
`
7
Адекватність – відповідність моделі оригіналу (системі, що моделюється ).
`
7
Адекватність – відповідність моделі оригіналу (системі, що моделюється ).
`
Для АСУ с изменяющимся во времени количеством объектов обслуживания (ОО),
`
Для АСУ с изменяющимся во времени количеством объектов обслуживания (ОО),
`
9
ПРИМЕР 1. (оптимизация параметра при ограничении аналогичного параметра)
Распределить M
`
9
ПРИМЕР 1. (оптимизация параметра при ограничении аналогичного параметра)
Распределить M
`
10
ПРИМЕР 2. (оптимизация одного параметра при ограничении другого параметра)
Распределить
`
10
ПРИМЕР 2. (оптимизация одного параметра при ограничении другого параметра)
Распределить
`
11
Классификация СМО Кендалла – Башарина (A / B / С) : (D / E / F),
А - входной
`
11
Классификация СМО Кендалла – Башарина (A / B / С) : (D / E / F),
А - входной
`
12
Примеры использования МАРКОВСКИХ ЦЕПЕЙ при моделировании:
- организация обстрела
`
12
Примеры использования МАРКОВСКИХ ЦЕПЕЙ при моделировании: - организация обстрела
`
12’
Марковский процесс с дискретными состояниями и непрерывным временем называется
`
12’
Марковский процесс с дискретными состояниями и непрерывным временем называется
`
13
Оценить эффективность системы управления пункта наведения (ПН), который позволяет
`
13
Оценить эффективность системы управления пункта наведения (ПН), который позволяет
`
Примеры использования многофазных СМО для моделирования вычислительных систем
14
Разработать модель
`
Примеры использования многофазных СМО для моделирования вычислительных систем
14
Разработать модель
`
Использование стохастических сетей (совокупность
взаимосвязанных СМО) для моделирования взаимодействующих систем
`
Использование стохастических сетей (совокупность
взаимосвязанных СМО) для моделирования взаимодействующих систем
`
16
3.3. Методи рішення задач прийняття рішень (ЗПР)
Рисунок 8 –
`
16
3.3. Методи рішення задач прийняття рішень (ЗПР)
Рисунок 8 –
`
17
Байєса
Різновиди критеріїв
Лапласса
Вальда
Гурвіца
Севіджа
ЗПР в
`
17
Байєса
Різновиди критеріїв
Лапласса
Вальда
Гурвіца
Севіджа
ЗПР в
`
4. Методи імітаційного моделювання систем управління
18
4.1. Метод Монте-Карло (одиночного
`
4. Методи імітаційного моделювання систем управління
18
4.1. Метод Монте-Карло (одиночного
 Бойові властивості та фактори ураження ядерної, хімічної, біологічної зброї
Бойові властивості та фактори ураження ядерної, хімічної, біологічної зброї Методика подготовки и подведения инструктивного занятия и инструктажа актива подразделения
Методика подготовки и подведения инструктивного занятия и инструктажа актива подразделения Распределение времени и внутренний порядок в подразделении
Распределение времени и внутренний порядок в подразделении Есть такая профессия - Родину защищать
Есть такая профессия - Родину защищать Індивідуальні дії солдата. Озброєння та екіпірування
Індивідуальні дії солдата. Озброєння та екіпірування Современные средства поражения. Оружие массового поражения
Современные средства поражения. Оружие массового поражения Инженерное оборудование и маскировка позиций (Занятие 4.1)
Инженерное оборудование и маскировка позиций (Занятие 4.1) Организация связи и скрытого управления войсками. (Тема 19.1)
Организация связи и скрытого управления войсками. (Тема 19.1) Боевая и мобилизационная готовность подразделений и частей
Боевая и мобилизационная готовность подразделений и частей Методическая система подготовки офицеров как руководителей обучения военнослужащих и пути совершенствования этой системы
Методическая система подготовки офицеров как руководителей обучения военнослужащих и пути совершенствования этой системы Ритуал приведения к военной присяге
Ритуал приведения к военной присяге Основы тылового обеспечения войск
Основы тылового обеспечения войск Қазақстан Республикасы Қарулы Күштерінің тәртіптік жарғысы
Қазақстан Республикасы Қарулы Күштерінің тәртіптік жарғысы Тема 2. Общие обязанности военнослужащих и солдата. Занятие 1. Общие обязанности военнослужащих и обязанности солдата
Тема 2. Общие обязанности военнослужащих и солдата. Занятие 1. Общие обязанности военнослужащих и обязанности солдата Инженерные заграждения
Инженерные заграждения Основные понятия о воинской обязанности. Организация воинского учёта
Основные понятия о воинской обязанности. Организация воинского учёта Будова і дія частин та механізмів кулемета КПВТ (Заняття 4.3)
Будова і дія частин та механізмів кулемета КПВТ (Заняття 4.3) Обычные средства поражения (Занятие 6.1)
Обычные средства поражения (Занятие 6.1) Организация призыва на военную службу
Организация призыва на военную службу Прицельные системы бомбометания
Прицельные системы бомбометания Умовні знаки НАТО
Умовні знаки НАТО Методы наведения ЗУР на цель
Методы наведения ЗУР на цель Захист Вітчизни. Розділ 7. Військова топографія
Захист Вітчизни. Розділ 7. Військова топографія Технічне обслуговування (ТО) техніки РЕБ
Технічне обслуговування (ТО) техніки РЕБ Обязанности граждан по воинскому учёту. Обязательная подготовка граждан к военной службе
Обязанности граждан по воинскому учёту. Обязательная подготовка граждан к военной службе ТТХ та призначення гармати МТ-12
ТТХ та призначення гармати МТ-12 Умови переходу до оборони та її мети
Умови переходу до оборони та її мети Боевая подготовка в Вооруженных Силах Российской Федерации
Боевая подготовка в Вооруженных Силах Российской Федерации