- Методы космической геодезии

Содержание
- 2. Методы космической геодезии: Геометрические методы (космическая триангуляция); Динамические методы - орбитальные методы, - собственно динамический метод,
- 3. Классификация систем координат По геометрии: - прямоугольные, - криволинейные (сферические, эллипсоидальные). По участию во вращении Земли:
- 4. Орбита ИСЗ
- 5. Элементы орбиты ИСЗ
- 6. Трасса ИСЗ
- 7. Наклонение - 89 Высота - 500 км Трассы ИСЗ
- 8. Методы наблюдений ИСЗ Оптические Визуальные Фотографические Лазерные Радио- технические Радио дальномерные Допплеровские
- 9. Фотографические спутниковые камеры Бейкер-Нанн
- 10. лазер ФСС ФОС СТАРТ ИВИ ЧАСЫ СТОП ПК Тх tB Отраженный лазерный сигнал (СТОП) Зондирующий лазерный
- 11. Основные области применения результатов лазерной дальнометрии КА Координатно-временное обеспечение ГНСС ГЛОНАСС Космическая геодезия и навигация Калибровка
- 12. Лазерные методы
- 13. Рабочая площадка с установленным на ней оборудованием, контейнерами и телескопом УНИФИЦИРОВАННАЯ ТРАНСПОРТИРУЕМАЯ КВАНТОВО-ОПТИЧЕСКАЯ СИСТЕМА Система в
- 14. Пассивные ИСЗ LAGEOS ЭТАЛОН PAGEOS
- 15. Активные ИСЗ GEOS GPS TOPEX-P GOCE ГЕО-ИК ГЛОНАСС
- 16. Впервые в отечественной практике с помощью 28-канальной адаптивной оптической системы и телескопа траекторных измерений АОЛЦ получено
- 17. Глобальные навигационные спутниковые системы
- 18. Навигация Синхронизация связи Наведение оружия Нацеливание Спутниковое позиционирование Фотографирование Местоположение сил Дитя военного ведомства США
- 19. Связь Геодезия и картография Рыболовство и судоходство Добыча нефти Отдых Слежение и доставка Персональная навигация Авиация
- 20. Структура GNSS GNSS состоит из трех основных частей - сегментов Станции Слежения О-в Диего Гарсия О-в
- 23. Ваши координаты: 55o 47’ 27” N 49o 07’ 09” E Глобальная навигационная спутниковая система
- 24. Сегмент пользователей
- 25. Система КВНО Российской Федерации Система КВНО Сегмент формирования искусственных навигационных полей Сегмент решения фундаментальных задач Потребительский
- 26. Орбитальная группировка: 24 спутника (3 плоскости по 8 спутников) Тип орбиты: круговая, высота - H =
- 27. Состав системы ГЛОНАСС (в соответствии с ТТТ к ГНС ГЛОНАСС, утвержденными 15.02.2008) Наземный комплекс управления Ракетно-космические
- 28. НКУ ГЛОНАСС (Космические Войска) ЦУС ГЛОНАСС Краснознаменск, М.О. Управление КА Станции КИС Ленинградская обл. Щелково, М.О.
- 29. ГИЦИУ КС – г.Краснознаменск
- 30. ГЛОНАСС Galileo GPS
- 31. КА Серии ГЛОНАСС КА ГЛОНАСС К КА ГЛОНАСС М
- 32. 1982 2011 2003 2013 ГСАС 3 года Нестабильность БСУ - 5*10-13 Сигналы: L1SF, L2SF, L1OF Всего
- 33. История и перспективы развития группировки: Этапы развития орбитальной группировки ГЛОНАСС: 18 КА в группировке – 2007
- 34. Система ГЛОНАСС расширенного состава Дирекция Средства контроля характеристик (гражданские) Средства контроля характеристик (специальные) Комплекс средств фундаментального
- 35. Развитие средств фундаментального обеспечения
- 36. Работы по системе ГЛОНАСС на среднесрочную перспективу будут проводиться в рамках федеральной целевой программы «Поддержание, развитие
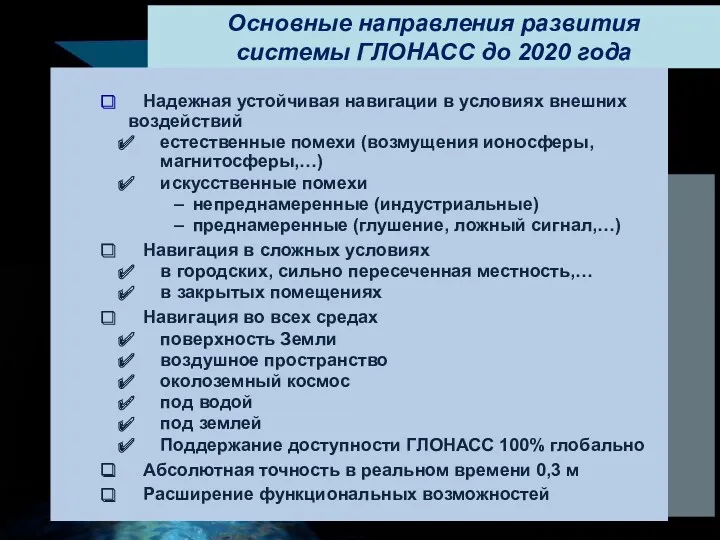
- 37. Основные направления развития системы ГЛОНАСС до 2020 года Надежная устойчивая навигации в условиях внешних воздействий естественные
- 39. Мировая тенденция развития глобальных навигационных спутниковых систем Глобальная среднеорбитальная группировка Региональная высокоорбитальная группировка Функциональные дополнения Ассистирующие
- 40. Геоид Методы определения параметров гравитационного поля Земли Наземные гравиметрические измерения Спутниковая альтиметрия Эволюция элементов орбиты ИСЗ
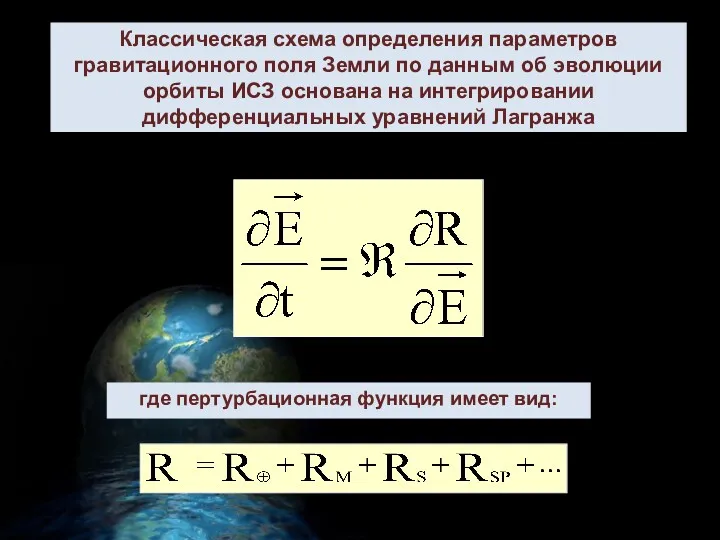
- 41. Классическая схема определения параметров гравитационного поля Земли по данным об эволюции орбиты ИСЗ основана на интегрировании
- 42. ортогональность системы сферических функций, наглядность геофизической интерпретации, наилучшее (при фиксированном N) среднеквадратическое приближение, развитая теория определения
- 43. Спутниковые методы дифференциальных измерений в системах с изменяемой геометрией расположения элементов Межспутниковое слежение - Satellite-to-Satellite Tracking
- 44. Advanced satellite techniques Satellite-to-Satellite Tracking - SST High-Low SST Low-Low SST Satellite Gravity Gradiometry - SGG
- 45. Кинематическая схема межспутникового слежения SST
- 46. CHAllenging Mini-satellite Payload for geophysical research and application 15 июля 2000г.
- 47. Измерения, выполняемые в интересах гравиметрии: Координаты ИСЗ CHAMP и псевдодальности, измеряемые бортовыми GPS-приемниками между высокими ИСЗ
- 48. HL SST
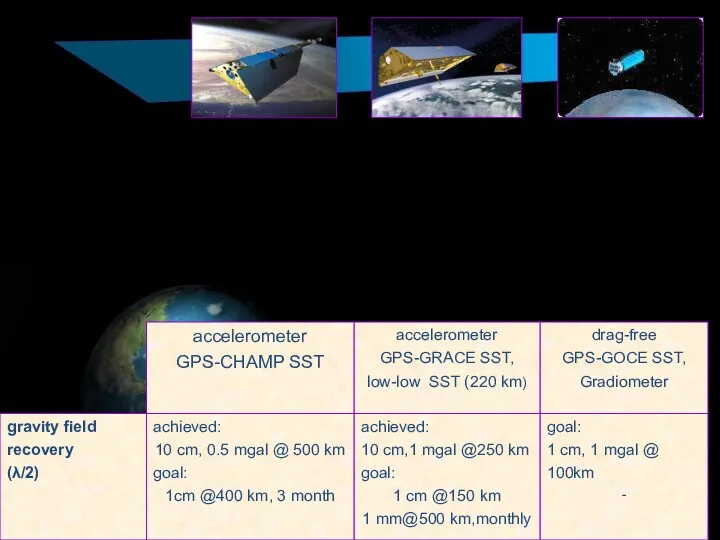
- 49. CHAMP mission benefits for a fundamental progress in gravity field recovery: near-polar orbit (i=87o) for a
- 50. Расположение бортовых антенн GPS-приемников
- 51. Фигура геоида по данным ИСЗ CHAMP
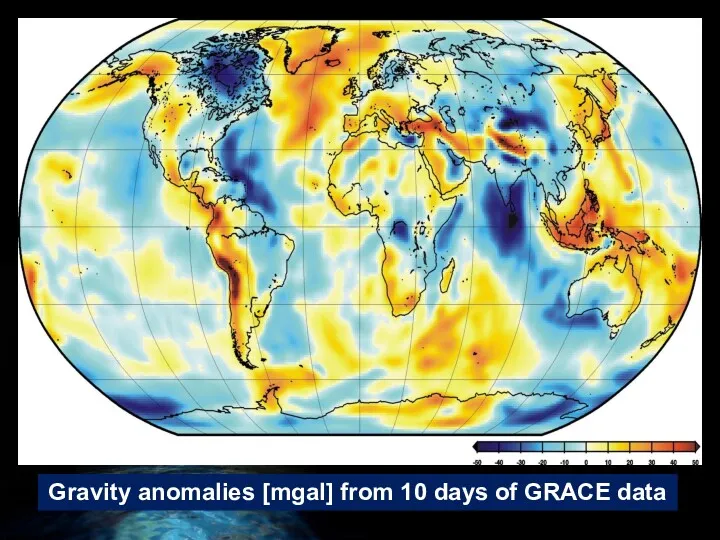
- 52. 17марта 2002г. Gravity Recovery And Climate Experiment
- 53. Позиционирование ИСЗ GRACE путем привязки к ИСЗ созвездия GPS LL SST + HL SST
- 54. GRACE Mission Concept GPS GRACE A/B hl code & phase GRACE A/B ll K-band range &
- 56. Gravity field and steady-state Ocean Circulation Explorer
- 57. Тензор вторых производных потенциала cилы тяжести W=V+Q=U+T W - потенциал силы тяжести, V - потенциал силы
- 58. Измерение вторых производных сводится к измерению а) компонент вектора относительного ускорения, б) компонент вектора относительного положения
- 59. Спутник GOCE - первый спутник выполняющий градиентометрические измерения.
- 60. Главные цели миссии GOCE: определить гравитационные аномалии с точностью 1 mGal; определить фигуру геоида с точностью
- 61. SGG + HL SST
- 62. Спутник GOCE - первый спутник с установленным на своем борту градиентометром Электростатический гравитационный градиентометр (EGG), предназначенный
- 63. EGG - трехосный градиентометр, состоящий из 3 пар, снабженных сервоприводами акселерометров на сверхустойчивой углеродной основе. Принцип
- 65. Разрешение подробностей фигуры геоида по данным: CHAMP GRACE GOCE
- 66. Модели гравитационного поля Земли
- 67. Gravity Recovery And Interior Laboratory
- 68. Аномалии силы тяжести на Луне по данным программы GRAIL
- 70. Аппараты-близнецы Ebb (отлив) и Flow (прилив) врезались в гору на северном полюсе Луны 17 декабря 2012
- 72. Скачать презентацию
Методы
космической геодезии:
Геометрические методы
(космическая триангуляция);
Динамические методы
- орбитальные методы,
-
Методы
космической геодезии:
Геометрические методы
(космическая триангуляция);
Динамические методы
- орбитальные методы,
-
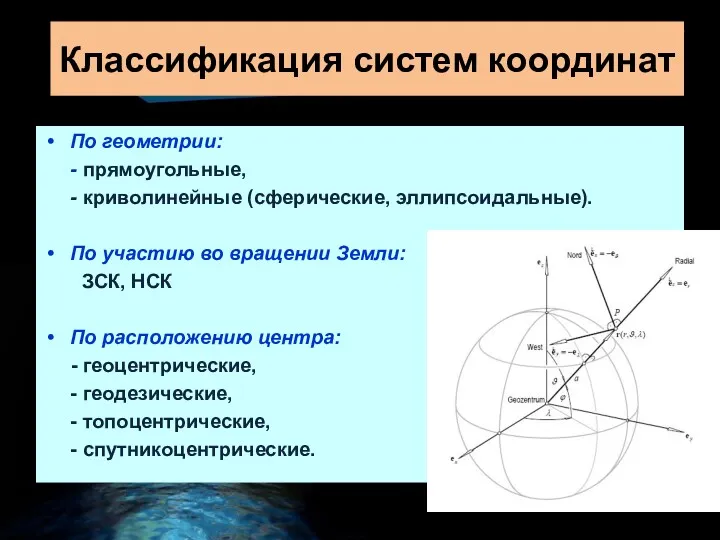
Классификация систем координат
По геометрии:
- прямоугольные,
- криволинейные (сферические,
Классификация систем координат
По геометрии:
- прямоугольные,
- криволинейные (сферические,
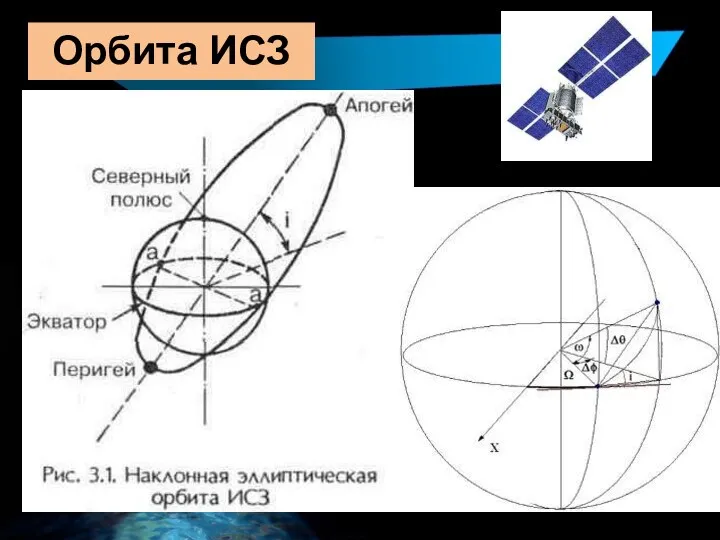
Орбита ИСЗ
Орбита ИСЗ
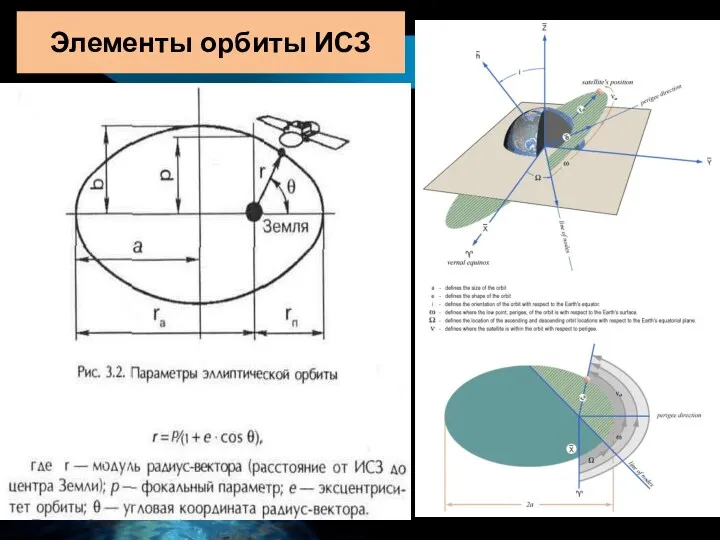
Элементы орбиты ИСЗ
Элементы орбиты ИСЗ
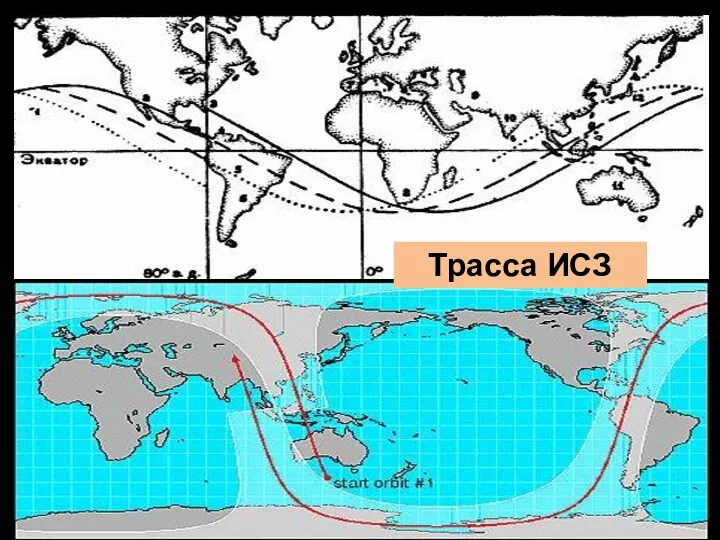
Трасса ИСЗ
Трасса ИСЗ
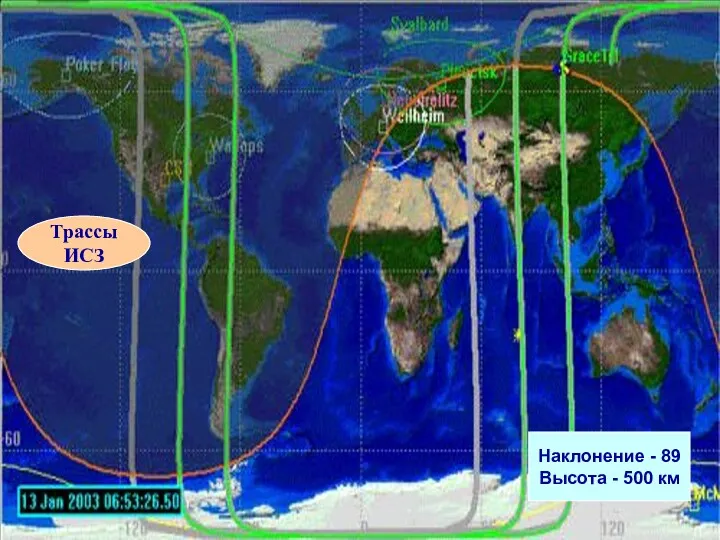
Наклонение - 89
Высота - 500 км
Трассы ИСЗ
Наклонение - 89
Высота - 500 км
Трассы ИСЗ
Методы
наблюдений ИСЗ
Оптические
Визуальные
Фотографические
Лазерные
Радио-
технические
Радио
дальномерные
Допплеровские
Методы
наблюдений ИСЗ
Оптические
Визуальные
Фотографические
Лазерные
Радио-
технические
Радио
дальномерные
Допплеровские

Фотографические спутниковые камеры
Бейкер-Нанн
Фотографические спутниковые камеры
Бейкер-Нанн

лазер
ФСС
ФОС
СТАРТ
ИВИ
ЧАСЫ
СТОП
ПК
Тх
tB
Отраженный
лазерный сигнал
(СТОП)
Зондирующий
лазерный сигнал
(СТАРТ)
Принцип действия лазерного импульсного дальномера
лазер
ФСС
ФОС
СТАРТ
ИВИ
ЧАСЫ
СТОП
ПК
Тх
tB
Отраженный
лазерный сигнал
(СТОП)
Зондирующий
лазерный сигнал
(СТАРТ)
Принцип действия лазерного импульсного дальномера
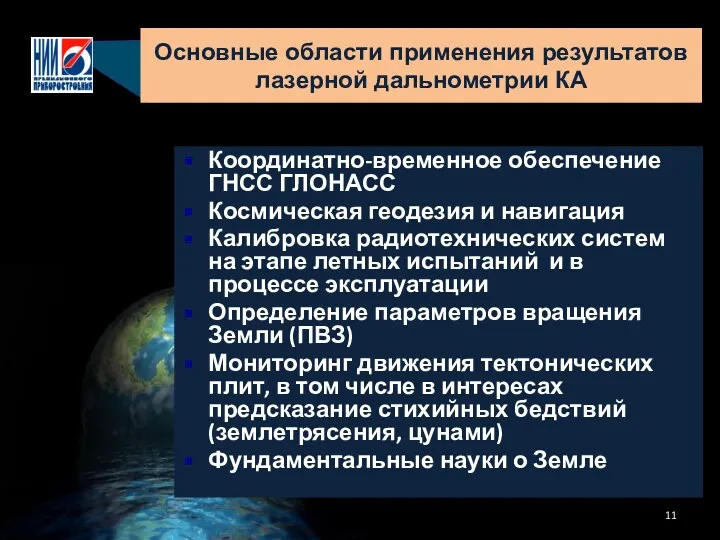
Основные области применения результатов лазерной дальнометрии КА
Координатно-временное обеспечение ГНСС ГЛОНАСС
Космическая геодезия
Основные области применения результатов лазерной дальнометрии КА
Координатно-временное обеспечение ГНСС ГЛОНАСС
Космическая геодезия

Лазерные методы
Лазерные методы

Рабочая площадка с установленным на ней оборудованием, контейнерами и телескопом
УНИФИЦИРОВАННАЯ ТРАНСПОРТИРУЕМАЯ
Рабочая площадка с установленным на ней оборудованием, контейнерами и телескопом
УНИФИЦИРОВАННАЯ ТРАНСПОРТИРУЕМАЯ
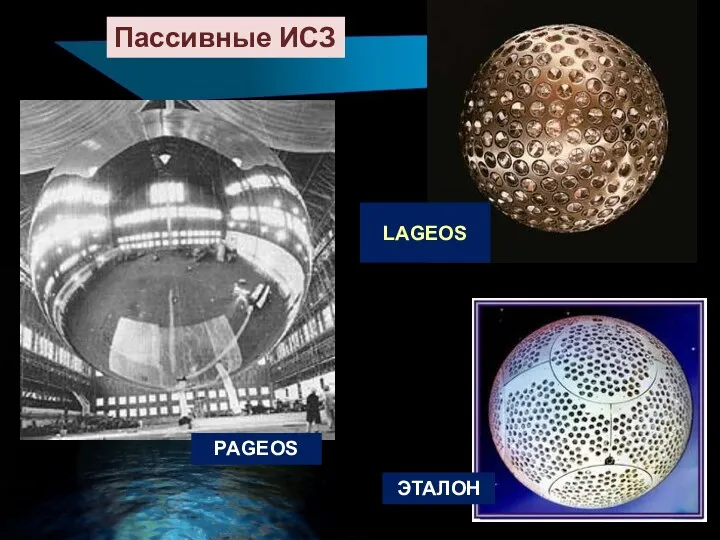
Пассивные ИСЗ
LAGEOS
ЭТАЛОН
PAGEOS
Пассивные ИСЗ
LAGEOS
ЭТАЛОН
PAGEOS

Активные ИСЗ
GEOS
GPS
TOPEX-P
GOCE
ГЕО-ИК
ГЛОНАСС
Активные ИСЗ
GEOS
GPS
TOPEX-P
GOCE
ГЕО-ИК
ГЛОНАСС

Впервые в отечественной практике с помощью
28-канальной адаптивной оптической системы и
Впервые в отечественной практике с помощью 28-канальной адаптивной оптической системы и
Глобальные навигационные спутниковые системы
Глобальные навигационные спутниковые системы

Навигация
Синхронизация связи
Наведение оружия
Нацеливание
Спутниковое позиционирование
Фотографирование
Местоположение сил
Дитя военного ведомства США
Навигация
Синхронизация связи
Наведение оружия
Нацеливание
Спутниковое позиционирование
Фотографирование
Местоположение сил
Дитя военного ведомства США

Связь
Геодезия и
картография
Рыболовство и
судоходство
Добыча
нефти
Отдых
Слежение и
доставка
Персональная навигация
Авиация
Железные дороги
Энергетические
системы
Гражданское использование GPS
Связь
Геодезия и
картография
Рыболовство и
судоходство
Добыча
нефти
Отдых
Слежение и
доставка
Персональная навигация
Авиация
Железные дороги
Энергетические
системы
Гражданское использование GPS

Структура GNSS
GNSS состоит из трех основных частей - сегментов
Станции Слежения
О-в
Структура GNSS
GNSS состоит из трех основных частей - сегментов
Станции Слежения
О-в

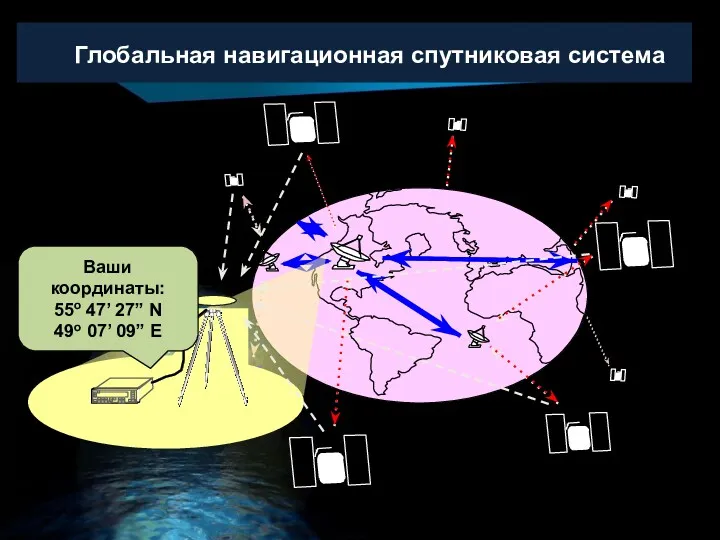
Ваши координаты:
55o 47’ 27” N
49o 07’ 09” E
Глобальная навигационная спутниковая
Ваши координаты:
55o 47’ 27” N
49o 07’ 09” E
Глобальная навигационная спутниковая

Сегмент пользователей
Сегмент пользователей

Система КВНО Российской Федерации
Система КВНО
Сегмент формирования искусственных навигационных полей
Сегмент
решения фундаментальных
Система КВНО Российской Федерации
Система КВНО
Сегмент формирования искусственных навигационных полей
Сегмент
решения фундаментальных
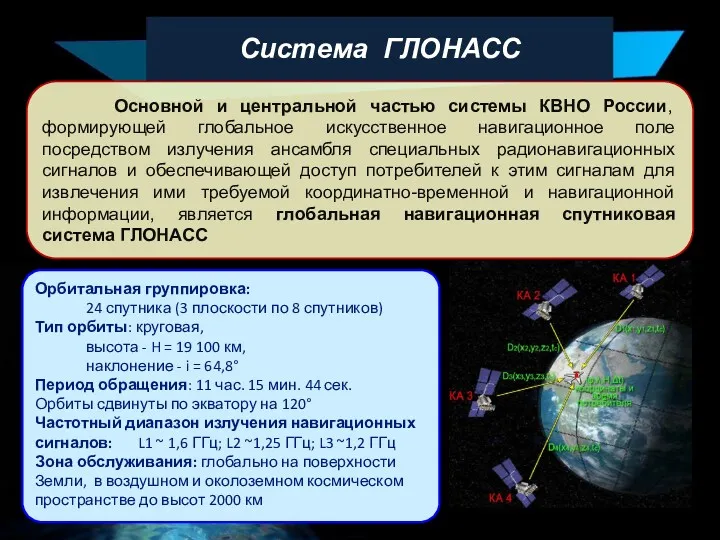
Орбитальная группировка:
24 спутника (3 плоскости по 8 спутников)
Тип орбиты: круговая,
высота
Орбитальная группировка:
24 спутника (3 плоскости по 8 спутников)
Тип орбиты: круговая,
высота
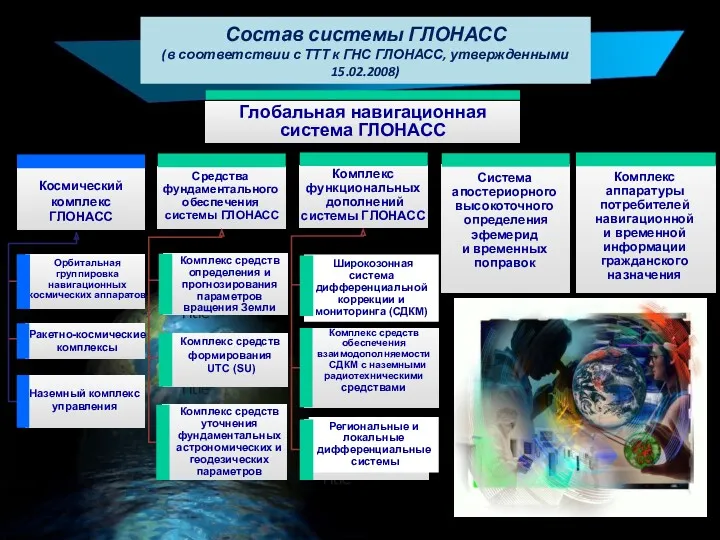
Состав системы ГЛОНАСС
(в соответствии с ТТТ к ГНС ГЛОНАСС, утвержденными 15.02.2008)
Наземный
Состав системы ГЛОНАСС
(в соответствии с ТТТ к ГНС ГЛОНАСС, утвержденными 15.02.2008)
Наземный

НКУ ГЛОНАСС (Космические Войска)
ЦУС ГЛОНАСС
Краснознаменск, М.О.
Управление КА
Станции КИС
Ленинградская обл.
Щелково, М.О.
Енисейск
Комсомольск
НКУ ГЛОНАСС (Космические Войска)
ЦУС ГЛОНАСС
Краснознаменск, М.О.
Управление КА
Станции КИС
Ленинградская обл.
Щелково, М.О.
Енисейск
Комсомольск

ГИЦИУ КС – г.Краснознаменск
ГИЦИУ КС – г.Краснознаменск
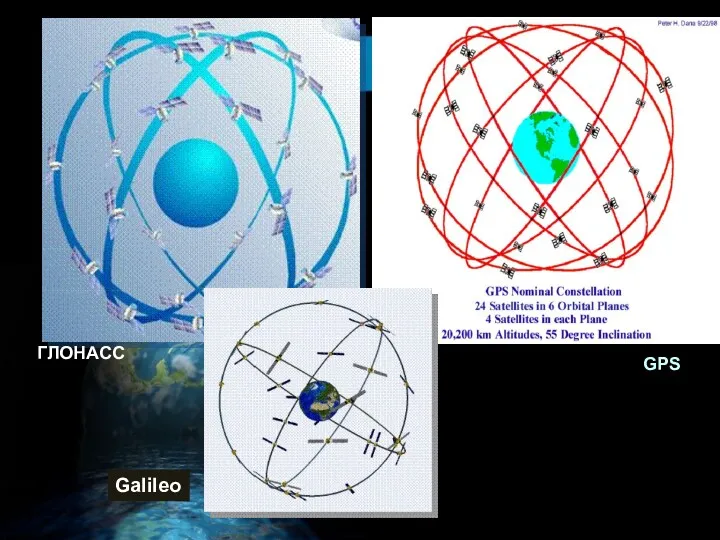
ГЛОНАСС
Galileo
GPS
ГЛОНАСС
Galileo
GPS

КА Серии ГЛОНАСС
КА ГЛОНАСС К
КА ГЛОНАСС М
КА Серии ГЛОНАСС
КА ГЛОНАСС К
КА ГЛОНАСС М

1982
2011
2003
2013
ГСАС 3 года
Нестабильность БСУ - 5*10-13
Сигналы:
L1SF, L2SF, L1OF
Всего запущен 81
1982
2011
2003
2013
ГСАС 3 года
Нестабильность БСУ - 5*10-13
Сигналы:
L1SF, L2SF, L1OF
Всего запущен 81

История и перспективы развития группировки:
Этапы развития орбитальной группировки ГЛОНАСС:
18 КА в
История и перспективы развития группировки:
Этапы развития орбитальной группировки ГЛОНАСС:
18 КА в
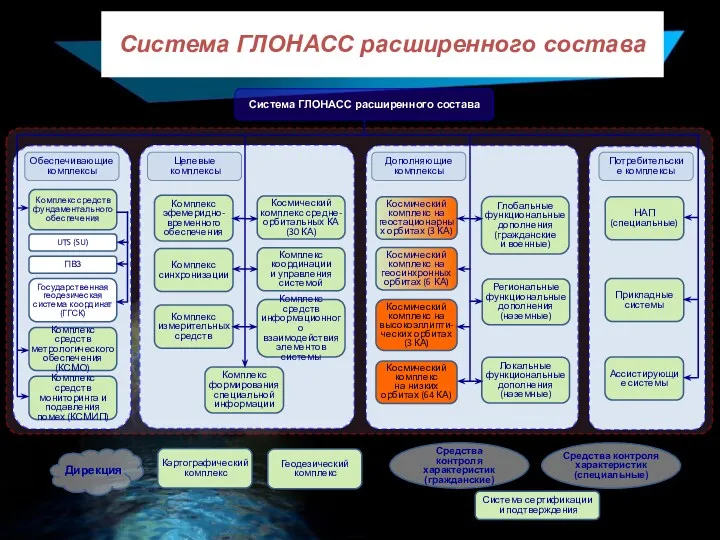
Система ГЛОНАСС расширенного состава
Дирекция
Средства контроля характеристик (гражданские)
Средства контроля характеристик (специальные)
Система ГЛОНАСС расширенного состава
Дирекция
Средства контроля характеристик (гражданские)
Средства контроля характеристик (специальные)

Развитие средств фундаментального обеспечения
Развитие средств фундаментального обеспечения

Работы по системе ГЛОНАСС на среднесрочную перспективу будут проводиться в рамках
Работы по системе ГЛОНАСС на среднесрочную перспективу будут проводиться в рамках
Основные направления развития
системы ГЛОНАСС до 2020 года
Надежная устойчивая навигации
Основные направления развития
системы ГЛОНАСС до 2020 года
Надежная устойчивая навигации
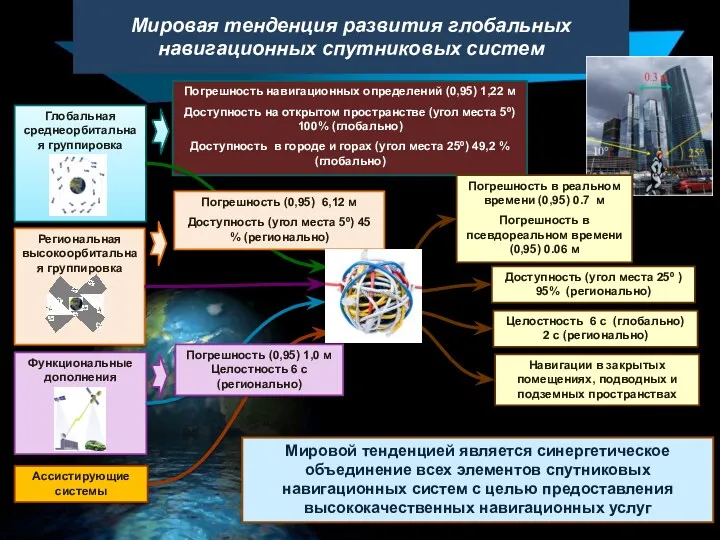
Мировая тенденция развития глобальных навигационных спутниковых систем
Глобальная среднеорбитальная группировка
Региональная высокоорбитальная группировка
Функциональные
Мировая тенденция развития глобальных навигационных спутниковых систем
Глобальная среднеорбитальная группировка
Региональная высокоорбитальная группировка
Функциональные
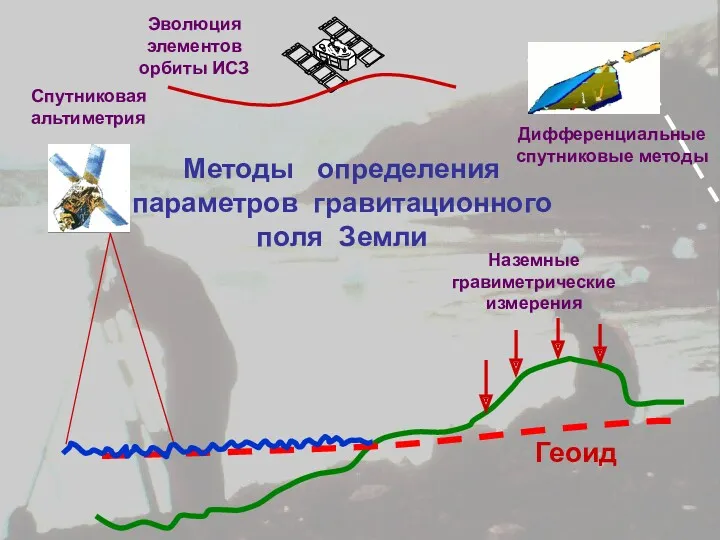
Геоид
Методы определения
параметров гравитационного поля Земли
Наземные
гравиметрические
измерения
Спутниковая
альтиметрия
Эволюция
элементов
орбиты ИСЗ
Дифференциальные
спутниковые методы
Геоид
Методы определения
параметров гравитационного поля Земли
Наземные
гравиметрические
измерения
Спутниковая
альтиметрия
Эволюция
элементов
орбиты ИСЗ
Дифференциальные
спутниковые методы
Классическая схема определения параметров
гравитационного поля Земли по данным об эволюции орбиты
Классическая схема определения параметров гравитационного поля Земли по данным об эволюции орбиты
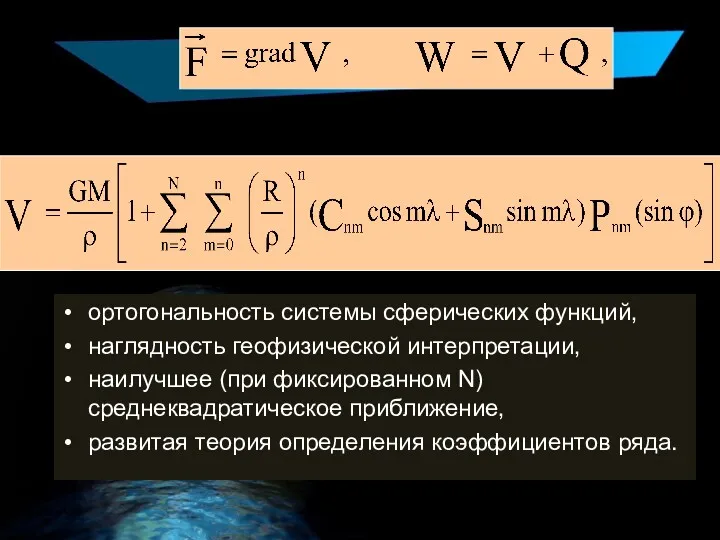
ортогональность системы сферических функций,
наглядность геофизической интерпретации,
наилучшее (при фиксированном N) среднеквадратическое приближение,
развитая
ортогональность системы сферических функций,
наглядность геофизической интерпретации,
наилучшее (при фиксированном N) среднеквадратическое приближение,
развитая

Спутниковые методы дифференциальных измерений в системах с изменяемой геометрией расположения элементов
Межспутниковое
Спутниковые методы дифференциальных измерений в системах с изменяемой геометрией расположения элементов
Межспутниковое
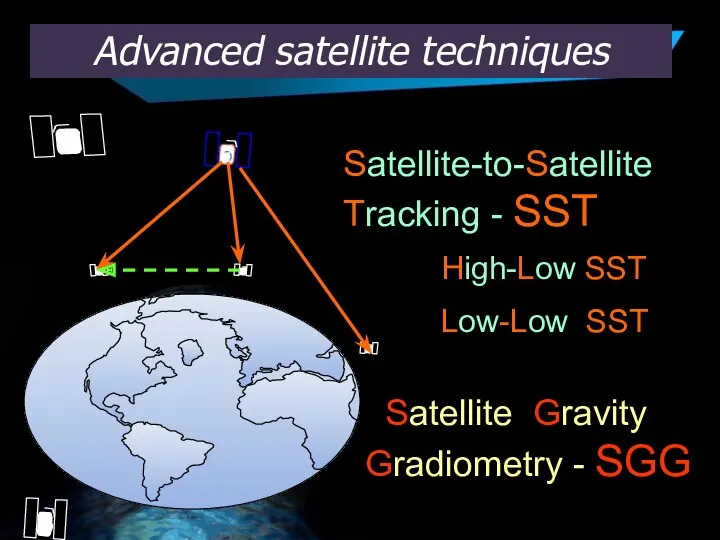
Advanced satellite techniques
Satellite-to-Satellite Tracking - SST
High-Low SST
Low-Low SST
Advanced satellite techniques
Satellite-to-Satellite Tracking - SST
High-Low SST
Low-Low SST
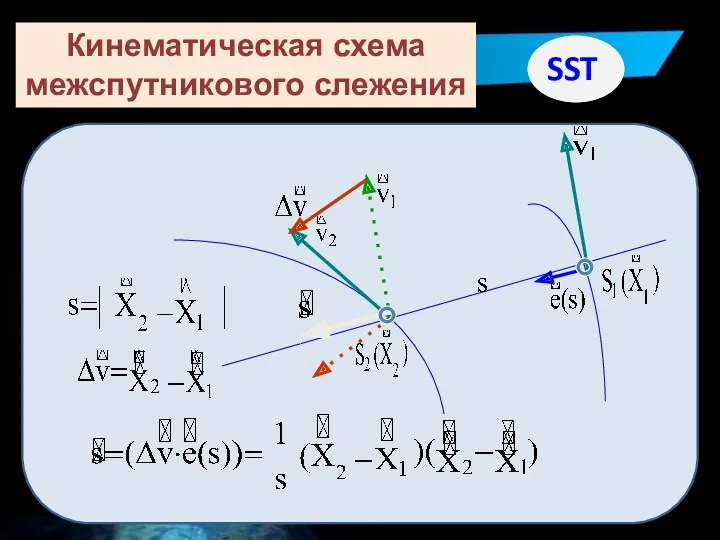
Кинематическая схема
межспутникового слежения
SST
Кинематическая схема
межспутникового слежения
SST
CHAllenging Mini-satellite Payload
for geophysical research and application
15 июля 2000г.
CHAllenging Mini-satellite Payload
for geophysical research and application
15 июля 2000г.
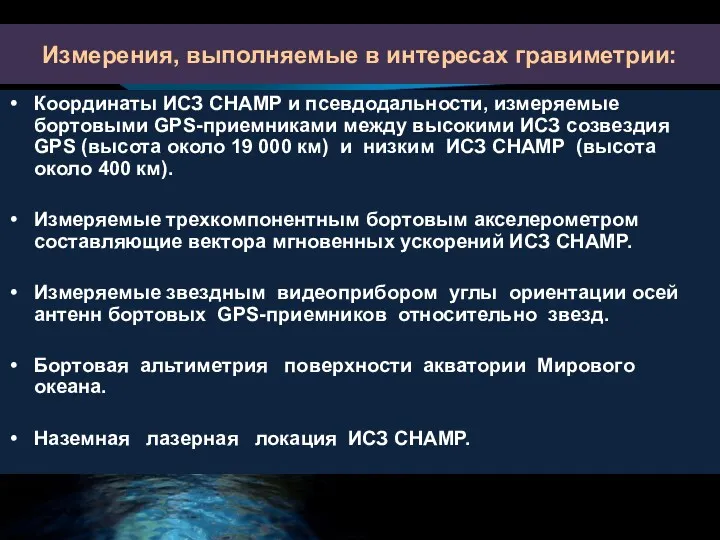
Измерения, выполняемые в интересах гравиметрии:
Координаты ИСЗ CHAMP и псевдодальности, измеряемые бортовыми
Измерения, выполняемые в интересах гравиметрии:
Координаты ИСЗ CHAMP и псевдодальности, измеряемые бортовыми
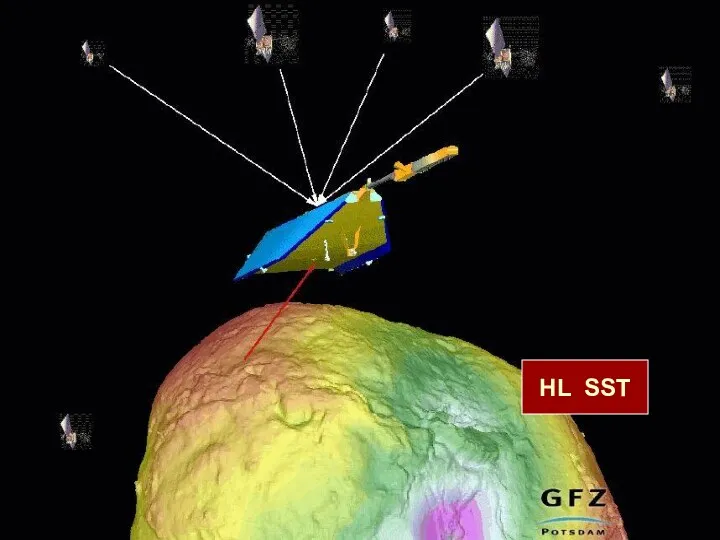
HL SST
HL SST
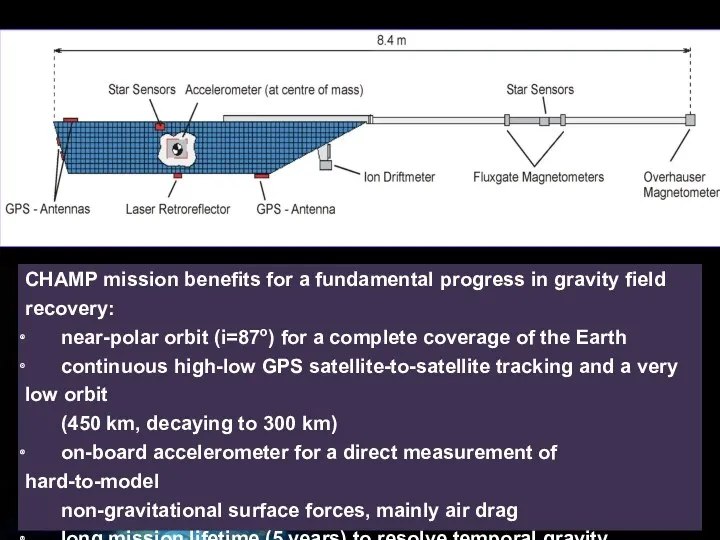
CHAMP mission benefits for a fundamental progress in gravity field recovery:
near-polar
CHAMP mission benefits for a fundamental progress in gravity field recovery:
near-polar
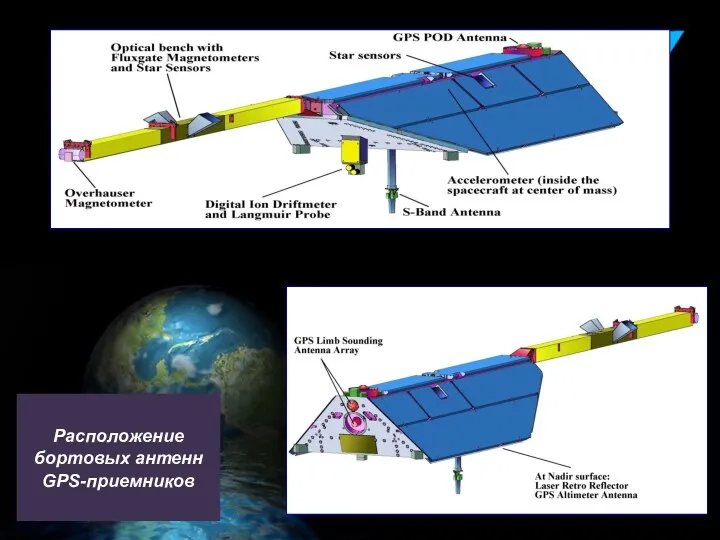
Расположение
бортовых антенн
GPS-приемников
Расположение
бортовых антенн
GPS-приемников
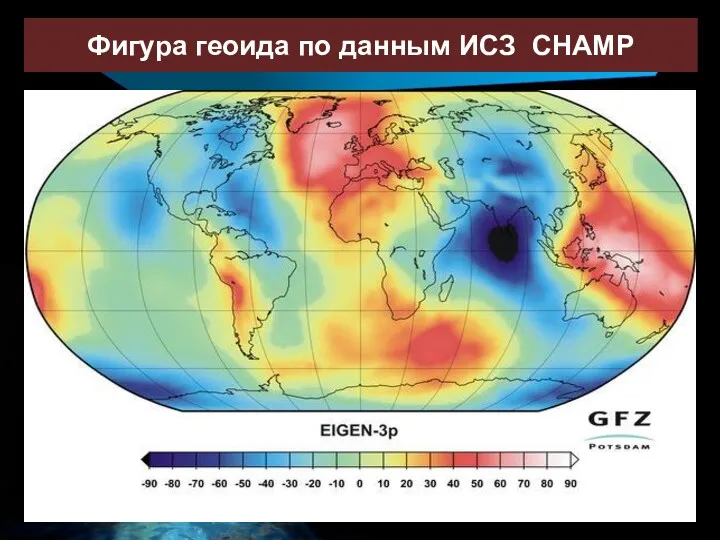
Фигура геоида по данным ИСЗ CHAMP
Фигура геоида по данным ИСЗ CHAMP
17марта 2002г.
Gravity Recovery And Climate Experiment
17марта 2002г.
Gravity Recovery And Climate Experiment

Позиционирование
ИСЗ GRACE путем
привязки к ИСЗ
созвездия GPS
LL
Позиционирование
ИСЗ GRACE путем
привязки к ИСЗ
созвездия GPS
LL
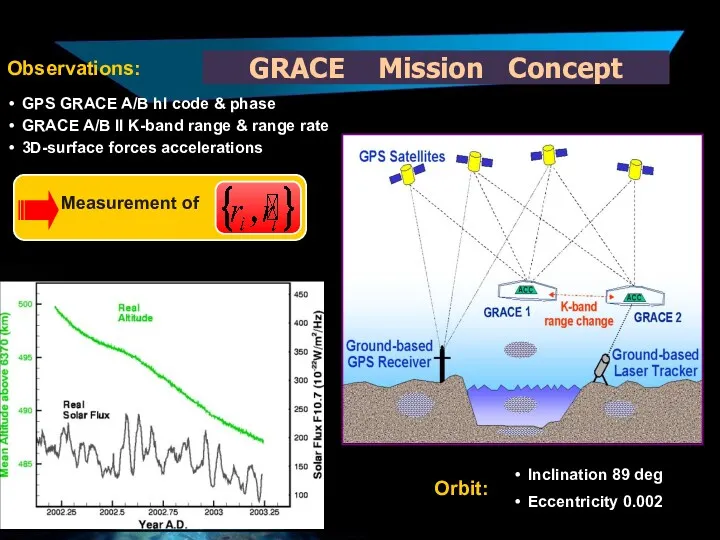
GRACE Mission Concept
GPS GRACE A/B hl code & phase
GRACE A/B ll
GRACE Mission Concept
GPS GRACE A/B hl code & phase
GRACE A/B ll

Gravity field and steady-state Ocean
Circulation Explorer
Gravity field and steady-state Ocean
Circulation Explorer
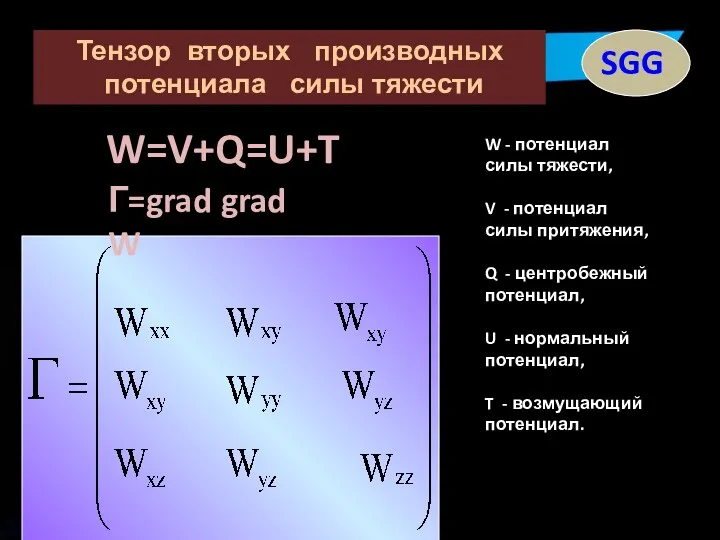
Тензор вторых производных
потенциала cилы тяжести
W=V+Q=U+T
W - потенциал
силы тяжести,
V
Тензор вторых производных
потенциала cилы тяжести
W=V+Q=U+T
W - потенциал
силы тяжести,
V
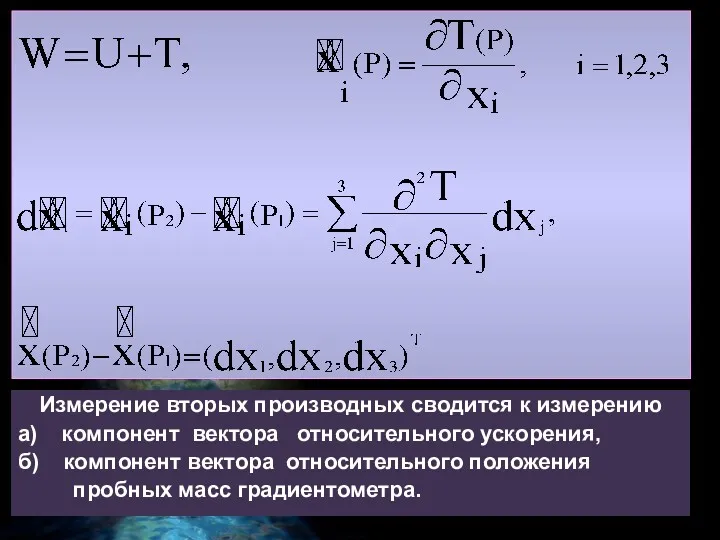
Измерение вторых производных сводится к измерению
а) компонент вектора относительного ускорения,
б)
Измерение вторых производных сводится к измерению
а) компонент вектора относительного ускорения,
б)

Спутник GOCE - первый спутник выполняющий градиентометрические измерения.
Спутник GOCE - первый спутник выполняющий градиентометрические измерения.
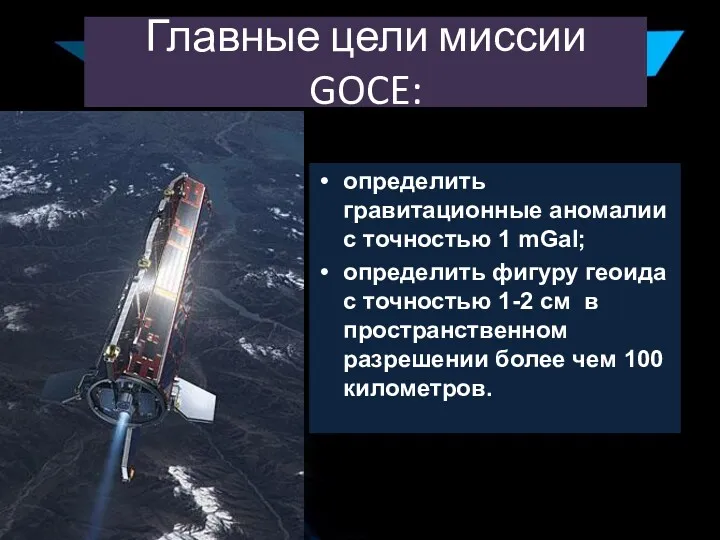
Главные цели миссии GOCE:
определить гравитационные аномалии с точностью 1 mGal;
определить фигуру
Главные цели миссии GOCE:
определить гравитационные аномалии с точностью 1 mGal;
определить фигуру
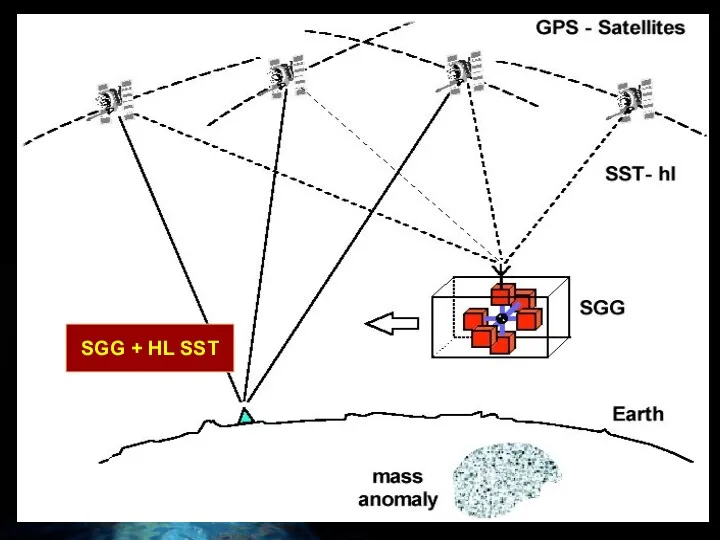
SGG + HL SST
SGG + HL SST
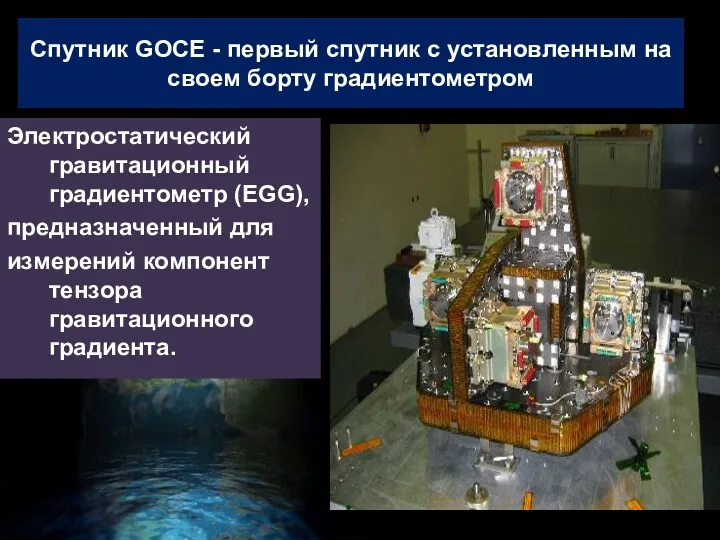
Спутник GOCE - первый спутник с установленным на своем борту градиентометром
Электростатический
Спутник GOCE - первый спутник с установленным на своем борту градиентометром
Электростатический
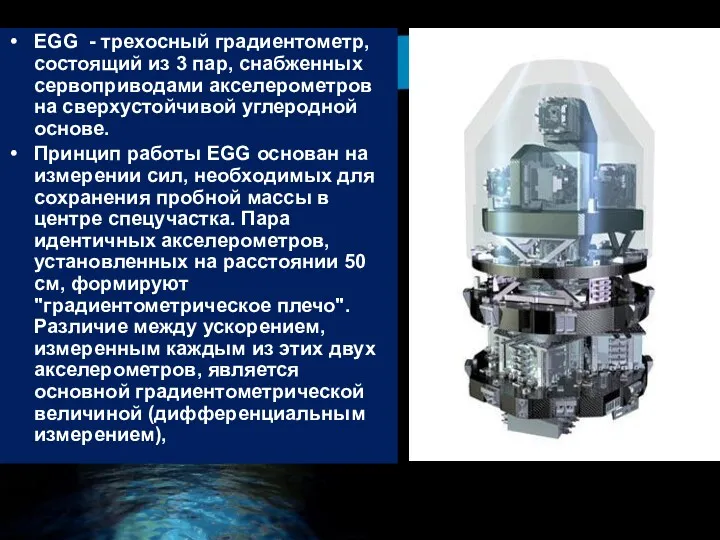
EGG - трехосный градиентометр, состоящий из 3 пар, снабженных сервоприводами акселерометров
EGG - трехосный градиентометр, состоящий из 3 пар, снабженных сервоприводами акселерометров
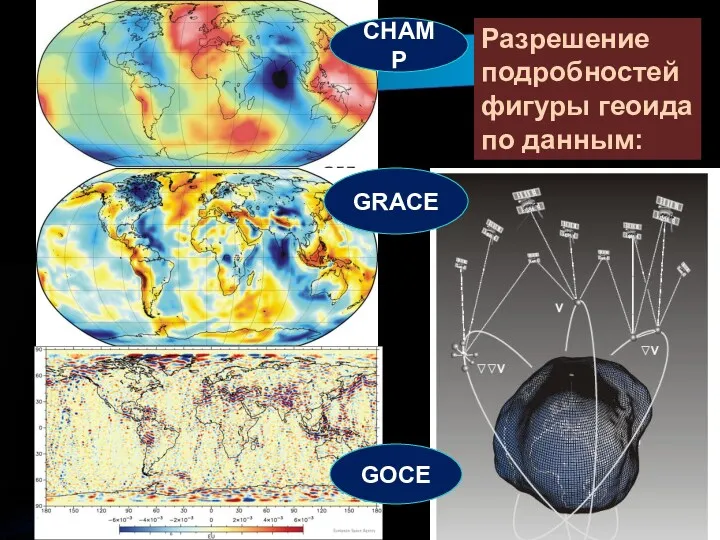
Разрешение
подробностей
фигуры геоида
по данным:
CHAMP
GRACE
GOCE
Разрешение
подробностей
фигуры геоида
по данным:
CHAMP
GRACE
GOCE

Модели
гравитационного
поля Земли
Модели
гравитационного
поля Земли
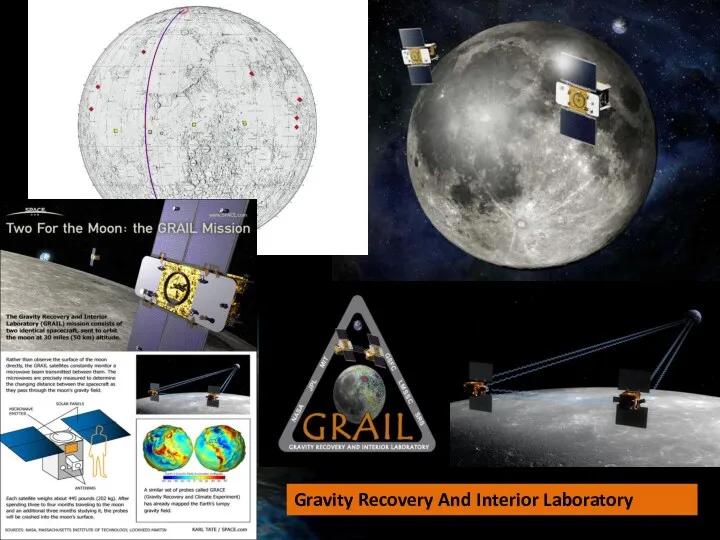
Gravity Recovery And Interior Laboratory
Gravity Recovery And Interior Laboratory
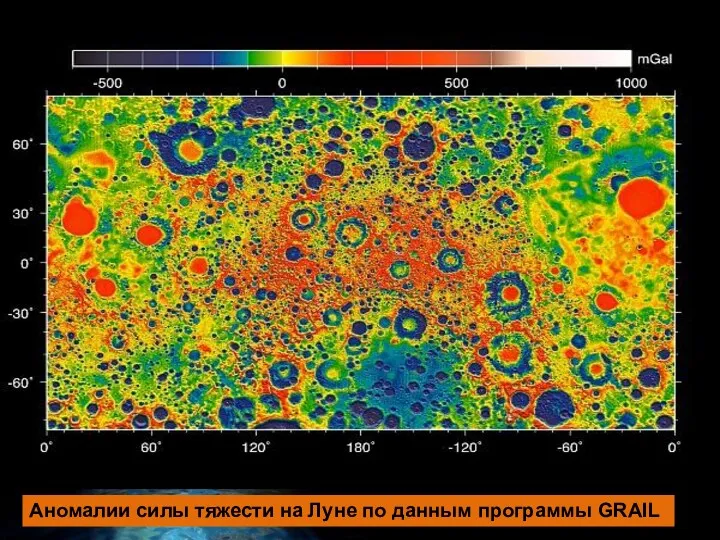
Аномалии силы тяжести на Луне по данным программы GRAIL
Аномалии силы тяжести на Луне по данным программы GRAIL
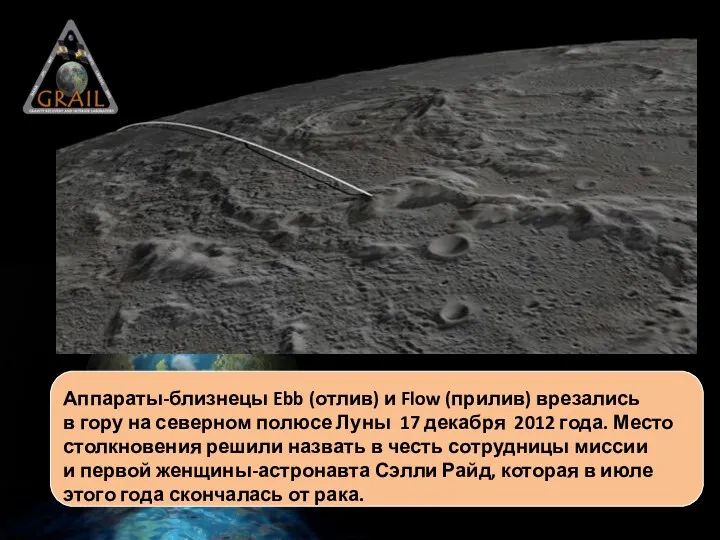
Аппараты-близнецы Ebb (отлив) и Flow (прилив) врезались в гору на северном полюсе Луны
Аппараты-близнецы Ebb (отлив) и Flow (прилив) врезались в гору на северном полюсе Луны
 Черные дыры: предсказание их существования, поиски во Вселенной, особенности подобных объектов
Черные дыры: предсказание их существования, поиски во Вселенной, особенности подобных объектов Звездное небо
Звездное небо Планеты солнечной системы и луна. (Часть 2)
Планеты солнечной системы и луна. (Часть 2) Земля. Презентація з предмету Астрономія
Земля. Презентація з предмету Астрономія Поиск внеземных цивилизаций
Поиск внеземных цивилизаций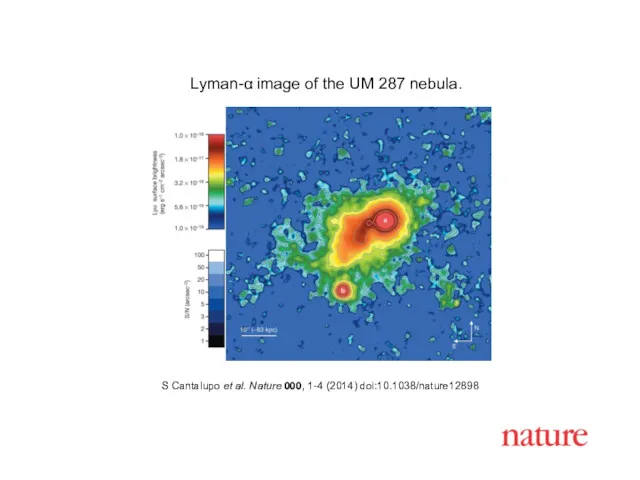 Lyman-α image of the UM 287 nebula
Lyman-α image of the UM 287 nebula Строение и эволюция Вселенной
Строение и эволюция Вселенной Космос
Космос Созвездие Пегас
Созвездие Пегас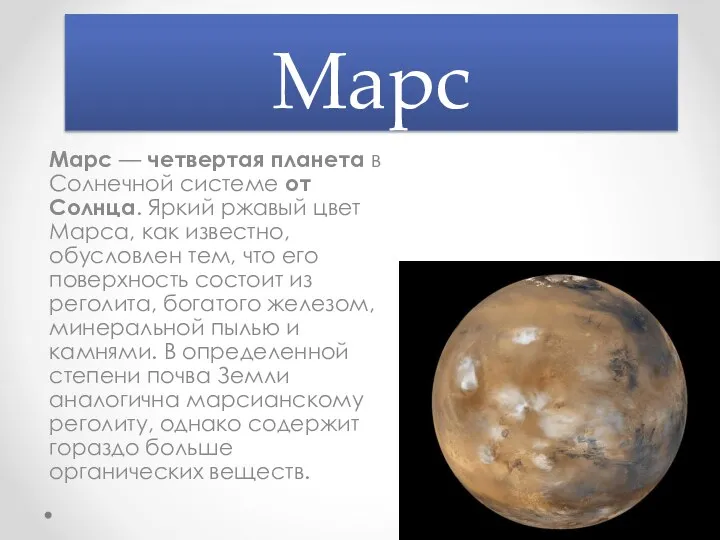 Планета Марс
Планета Марс Штучні супутники Землі
Штучні супутники Землі Космос
Космос Космические тела. Звёзды
Космические тела. Звёзды Земля і Місяць
Земля і Місяць Жизнь звезды
Жизнь звезды Чёрные дыры во Вселенной
Чёрные дыры во Вселенной Атмосфера солнца. Солнечная активность
Атмосфера солнца. Солнечная активность Тела космического происхождения - метеориты
Тела космического происхождения - метеориты Космос. Исследование космоса
Космос. Исследование космоса Презентация к интегрированному уроку химии-географии-биологии Железо. Металлургический комплекс Диск
Презентация к интегрированному уроку химии-географии-биологии Железо. Металлургический комплекс Диск Экзопланеты: мир иных миров
Экзопланеты: мир иных миров Астрономия. Звезда. Созвездие. Звездные величины
Астрономия. Звезда. Созвездие. Звездные величины Своя игра о космосе
Своя игра о космосе Красная луна
Красная луна Викторина Космос 5 класс
Викторина Космос 5 класс Освоение космоса
Освоение космоса Поиски жизни во вселенной
Поиски жизни во вселенной Галактики
Галактики