- Робототехника, применение в космосе

Содержание
- 2. КОСМИЧЕСКИЕ РОБОТЫ Космические исследования и размещение лазерного оружия - самое перспективное направление в развитии космической робототехники.
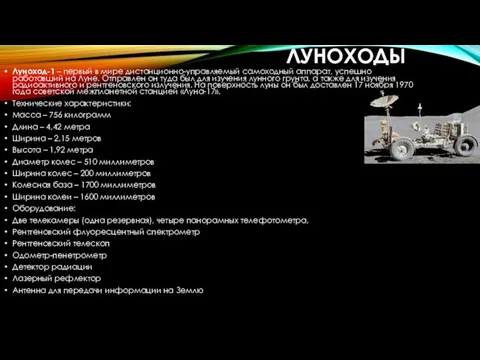
- 3. ЛУНОХОДЫ Луноход-1 – первый в мире дистанционно-управляемый самоходный аппарат, успешно работавший на Луне. Отправлен он туда
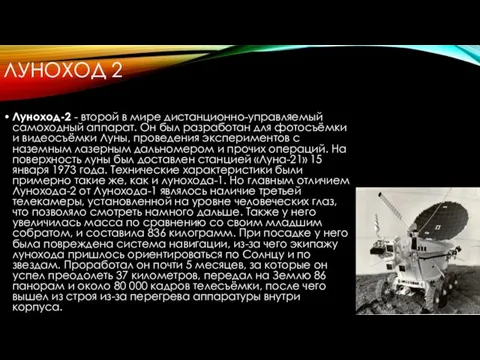
- 4. ЛУНОХОД 2 Луноход-2 - второй в мире дистанционно-управляемый самоходный аппарат. Он был разработан для фотосъёмки и
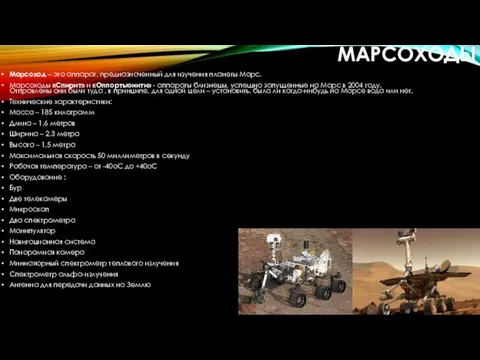
- 5. МАРСОХОДЫ Марсоход – это аппарат, предназначенный для изучения планеты Марс. Марсоходы «Спирит» и «Оппортьюнити» - аппараты
- 6. «БУРАН» Одним из самых ярких представителей полных по своей автоматизации и интеллекту космических роботов являлся корабль-челнок
- 7. БУРАН» ПРЕДНАЗНАЧАЛСЯ ДЛЯ: - комплексного противодействия мероприятиям вероятного противника по расширению использования космического пространства в военных
- 8. КОСМОРОБОТЫ Космороботы создаются самостоятельными, способными работать без связи с Землей и справляться, по возможности, с любыми
- 9. РОБОТ VALKYRIE Робот Valkyrie для освоения космоса Робот, официальное название которого R5, имеет рост 190 см
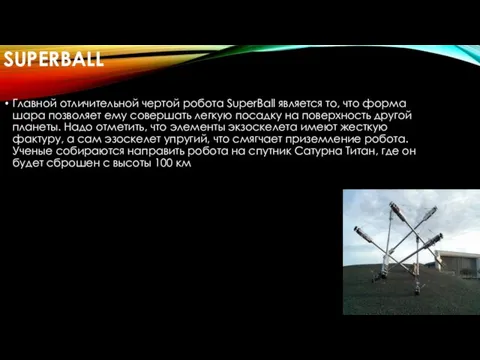
- 10. SUPERBALL Главной отличительной чертой робота SuperBall является то, что форма шара позволяет ему совершать легкую посадку
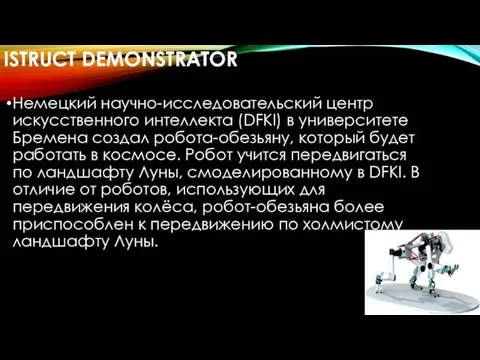
- 11. ISTRUCT DEMONSTRATOR Немецкий научно-исследовательский центр искусственного интеллекта (DFKI) в университете Бремена создал робота-обезьяну, который будет работать
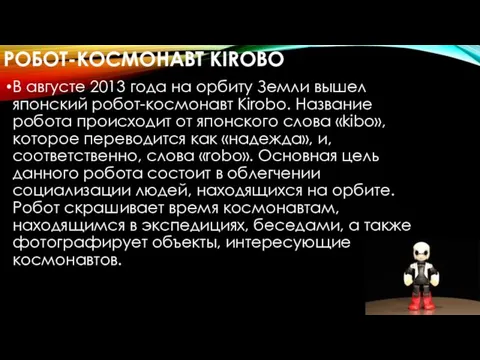
- 12. РОБОТ-КОСМОНАВТ KIROBO В августе 2013 года на орбиту Земли вышел японский робот-космонавт Kirobo. Название робота происходит
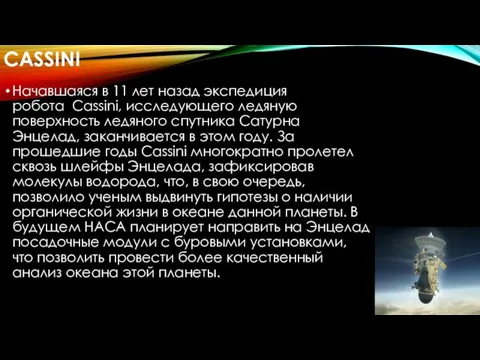
- 13. CASSINI Начавшаяся в 11 лет назад экспедиция робота Cassini, исследующего ледяную поверхность ледяного спутника Сатурна Энцелад,
- 14. РОБОТ-РЕМОНТНИК ДЖАСТИН Робот-андроид Джастин создан в Институте Робототехники и Механотроники, который является частью немецкого Космического Центра.
- 15. МАНИПУЛЯТОРЫ Система бортовых манипуляторов "Аист" Система бортовых манипуляторов (СБМ) "Аист" предназначена для выполнения операций на орбите
- 16. Конструктивно состоит из двух "плеч", соединенных "локтевым суставом", и двух захватов-эффекторов LEE (Latching End-Effectors) - A
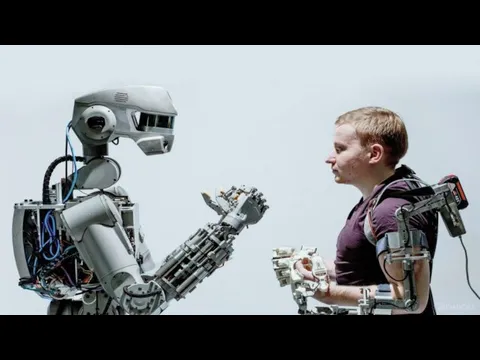
- 17. РОБОТЫ - АВАТАРЫ Роботы - аватары - это роботы, полностью копирующие людей, и способные в точности
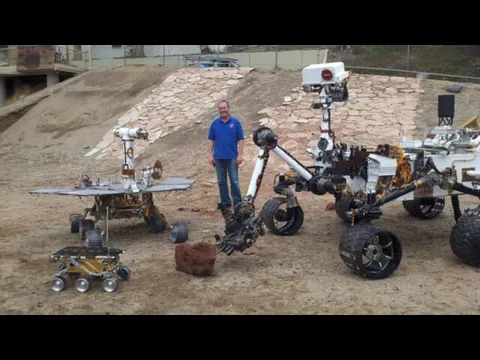
- 19. РОВЕРЫ Самые распространенные из автоматических аппаратов, использующихся в космических исследованиях - это роверы (луноходы, марсоходы). Такой
- 21. РОБОНАУТ Телеуправляемый робот-кентавр, представляющий собой новое поколение высокомобильных манипуляторов для работы в открытом космосе (рис.8). Предназначен
- 31. Скачать презентацию
КОСМИЧЕСКИЕ РОБОТЫ
Космические исследования и размещение лазерного оружия - самое перспективное направление
КОСМИЧЕСКИЕ РОБОТЫ
Космические исследования и размещение лазерного оружия - самое перспективное направление
ЛУНОХОДЫ
Луноход-1 – первый в мире дистанционно-управляемый самоходный аппарат, успешно работавший на Луне.
ЛУНОХОДЫ
Луноход-1 – первый в мире дистанционно-управляемый самоходный аппарат, успешно работавший на Луне.
ЛУНОХОД 2
Луноход-2 - второй в мире дистанционно-управляемый самоходный аппарат. Он был разработан
ЛУНОХОД 2
Луноход-2 - второй в мире дистанционно-управляемый самоходный аппарат. Он был разработан
МАРСОХОДЫ
Марсоход – это аппарат, предназначенный для изучения планеты Марс.
Марсоходы «Спирит» и «Оппортьюнити» - аппараты близнецы, успешно
МАРСОХОДЫ
Марсоход – это аппарат, предназначенный для изучения планеты Марс.
Марсоходы «Спирит» и «Оппортьюнити» - аппараты близнецы, успешно
«БУРАН»
Одним из самых ярких представителей полных по своей автоматизации и интеллекту
«БУРАН»
Одним из самых ярких представителей полных по своей автоматизации и интеллекту
БУРАН» ПРЕДНАЗНАЧАЛСЯ ДЛЯ:
- комплексного противодействия мероприятиям вероятного противника по расширению использования
БУРАН» ПРЕДНАЗНАЧАЛСЯ ДЛЯ:
- комплексного противодействия мероприятиям вероятного противника по расширению использования
КОСМОРОБОТЫ
Космороботы создаются самостоятельными, способными работать без связи с Землей и справляться,
КОСМОРОБОТЫ
Космороботы создаются самостоятельными, способными работать без связи с Землей и справляться,
РОБОТ VALKYRIE
Робот Valkyrie для освоения космоса Робот, официальное название которого R5, имеет рост
РОБОТ VALKYRIE
Робот Valkyrie для освоения космоса Робот, официальное название которого R5, имеет рост
SUPERBALL
Главной отличительной чертой робота SuperBall является то, что форма шара позволяет
SUPERBALL
Главной отличительной чертой робота SuperBall является то, что форма шара позволяет
ISTRUCT DEMONSTRATOR
Немецкий научно-исследовательский центр искусственного интеллекта (DFKI) в университете Бремена создал
ISTRUCT DEMONSTRATOR
Немецкий научно-исследовательский центр искусственного интеллекта (DFKI) в университете Бремена создал
РОБОТ-КОСМОНАВТ KIROBO
В августе 2013 года на орбиту Земли вышел японский робот-космонавт
РОБОТ-КОСМОНАВТ KIROBO
В августе 2013 года на орбиту Земли вышел японский робот-космонавт
CASSINI
Начавшаяся в 11 лет назад экспедиция робота Cassini, исследующего ледяную поверхность
CASSINI
Начавшаяся в 11 лет назад экспедиция робота Cassini, исследующего ледяную поверхность
РОБОТ-РЕМОНТНИК ДЖАСТИН
Робот-андроид Джастин создан в Институте Робототехники и Механотроники, который является
РОБОТ-РЕМОНТНИК ДЖАСТИН
Робот-андроид Джастин создан в Институте Робототехники и Механотроники, который является
МАНИПУЛЯТОРЫ
Система бортовых манипуляторов "Аист"
Система бортовых манипуляторов (СБМ) "Аист" предназначена для выполнения
МАНИПУЛЯТОРЫ
Система бортовых манипуляторов "Аист" Система бортовых манипуляторов (СБМ) "Аист" предназначена для выполнения

Конструктивно состоит из двух "плеч", соединенных "локтевым суставом", и двух захватов-эффекторов
Конструктивно состоит из двух "плеч", соединенных "локтевым суставом", и двух захватов-эффекторов
РОБОТЫ - АВАТАРЫ
Роботы - аватары - это роботы, полностью копирующие людей,
РОБОТЫ - АВАТАРЫ
Роботы - аватары - это роботы, полностью копирующие людей,

РОВЕРЫ
Самые распространенные из автоматических аппаратов, использующихся в космических исследованиях - это
РОВЕРЫ
Самые распространенные из автоматических аппаратов, использующихся в космических исследованиях - это
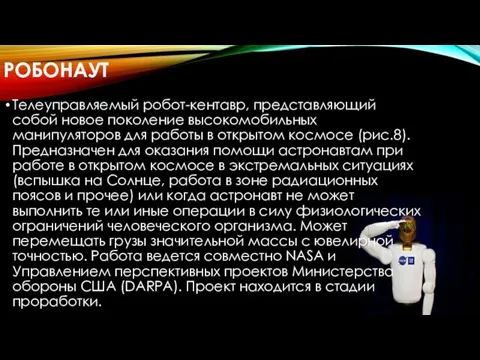
РОБОНАУТ
Телеуправляемый робот-кентавр, представляющий собой новое поколение высокомобильных манипуляторов для работы в
РОБОНАУТ
Телеуправляемый робот-кентавр, представляющий собой новое поколение высокомобильных манипуляторов для работы в
 Жұлдызды аспан
Жұлдызды аспан Сонячна активність. Прояви сонячної активності
Сонячна активність. Прояви сонячної активності Созвездия. Звездные карты. Небесные координаты
Созвездия. Звездные карты. Небесные координаты Малые тела Солнечной системы
Малые тела Солнечной системы Астрофизика и звездная астрономия
Астрофизика и звездная астрономия 12 апреля - День авиации и космонавтики
12 апреля - День авиации и космонавтики Неочікувані речі в космосі
Неочікувані речі в космосі О космосе. Юрий Алексеевич Гагарин
О космосе. Юрий Алексеевич Гагарин Уникальность планеты Земля
Уникальность планеты Земля Туманности
Туманности Жұлдыздарды анықтау
Жұлдыздарды анықтау Солнце. (11 класс)
Солнце. (11 класс) Gnss-технологии
Gnss-технологии Юпитер и его спутники
Юпитер и его спутники Высадка на Луну
Высадка на Луну Транснептуновые объекты и астероиды (1). Малые тела Солнечной системы. Урок 18
Транснептуновые объекты и астероиды (1). Малые тела Солнечной системы. Урок 18 Человек в космосе. Посвящается 50-летию полёта Валентины Терешковой
Человек в космосе. Посвящается 50-летию полёта Валентины Терешковой Туманности. Открытие туманностей
Туманности. Открытие туманностей Гелиоцентрическая концепция Николая Коперника
Гелиоцентрическая концепция Николая Коперника Нові та наднові зорі
Нові та наднові зорі Происхождение и развитие Вселенной (11 класс)
Происхождение и развитие Вселенной (11 класс)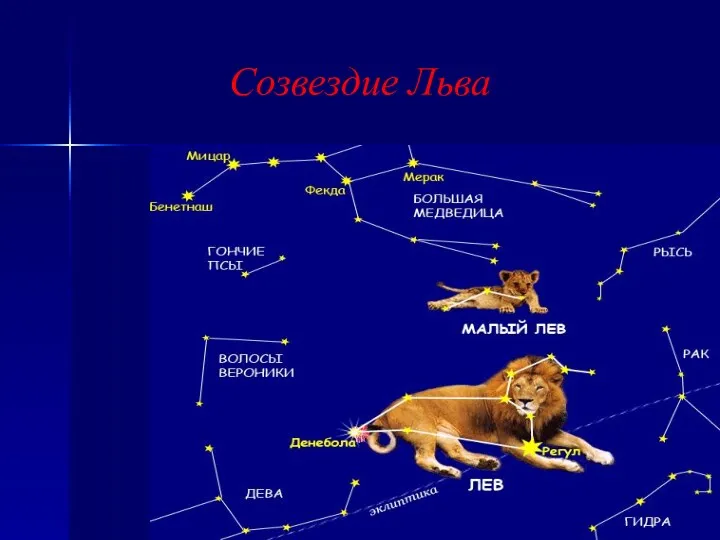 Созвездие Льва
Созвездие Льва Планета Венера
Планета Венера Космос
Космос Планеты Солнечной системы и древние боги из мифов
Планеты Солнечной системы и древние боги из мифов Роль астрономии в развитии цивилизации
Роль астрономии в развитии цивилизации Астрономия в картинках
Астрономия в картинках Комети і астероїди
Комети і астероїди