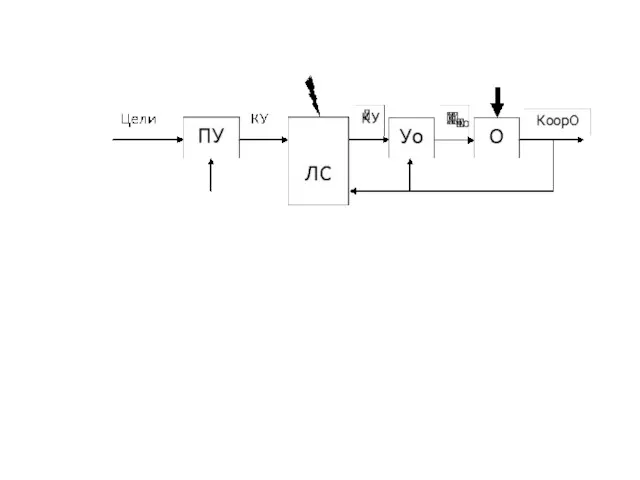
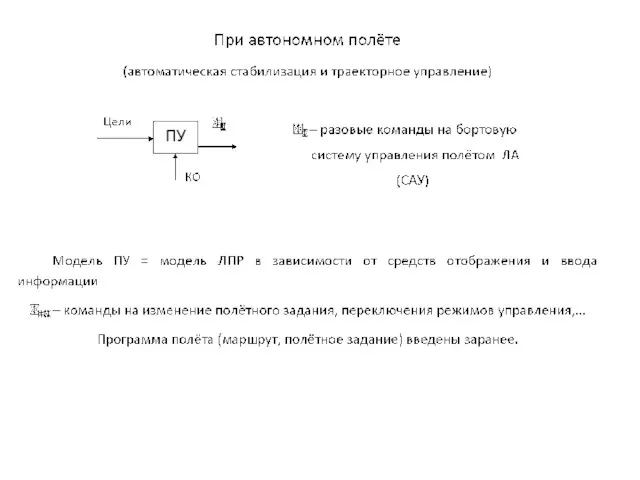
- Алгоритмы управления полётом БЛА. Система управления полётом (СУП)

Содержание
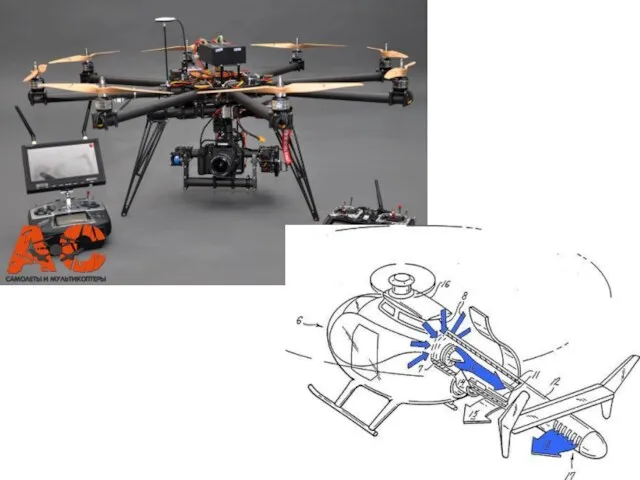
- 2. Особенности для различных аэродинамических типов ЛА: планирующие (самолёты) мультироторные (коптеры) и с газодинамическим управлением вертолёты (управляемый
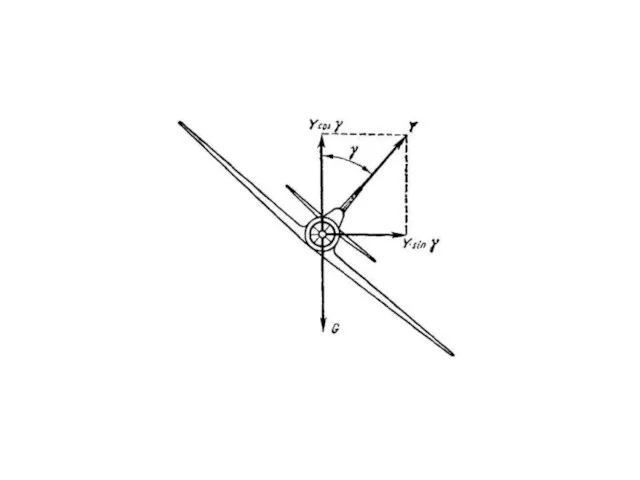
- 4. Основной принцип аэродинамического управления ЛА планирующего типа – создание (изменение) поперечных сил («подъёмной» и «боковой») путём
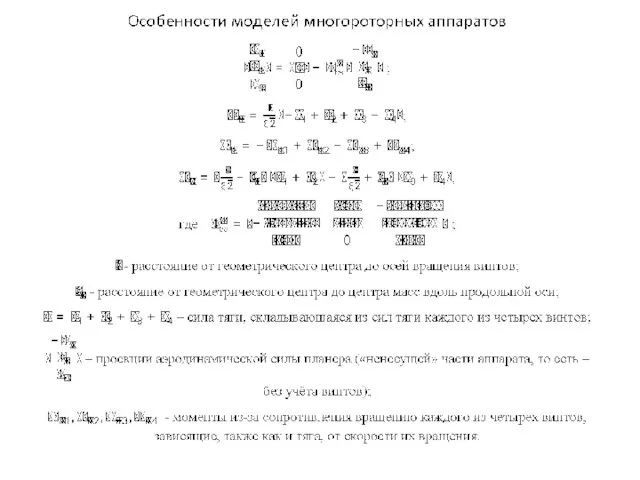
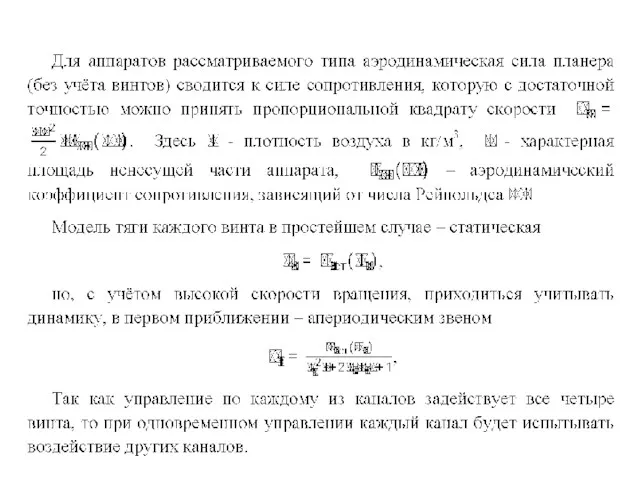
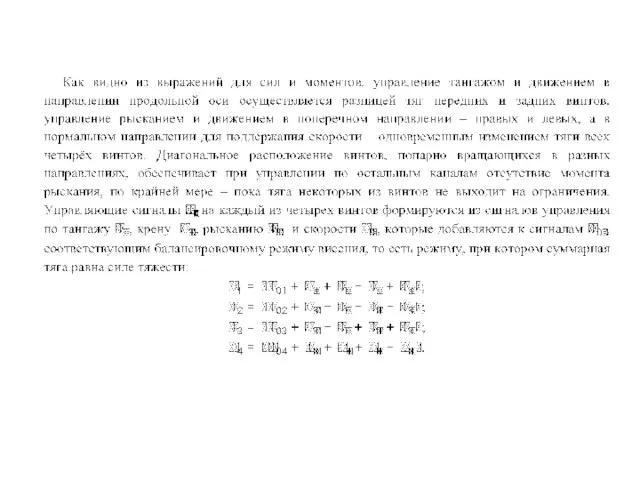
- 6. Основной принцип управления мультироторных ЛА и винтокрылых ЛА со струйным управлением (вектор тяги – всегда по
- 8. Основной принцип аэродинамического управления ЛА вертолётного типа – создание (изменение) горизонтальных («пропульсивных») сил («продольной» и «боковой»)
- 10. Создание моделей и исследование динамических свойств разрабатываемой системы
- 14. Модель линий связи без учёта помех Модель помех с учётом их обработки (статистическая)
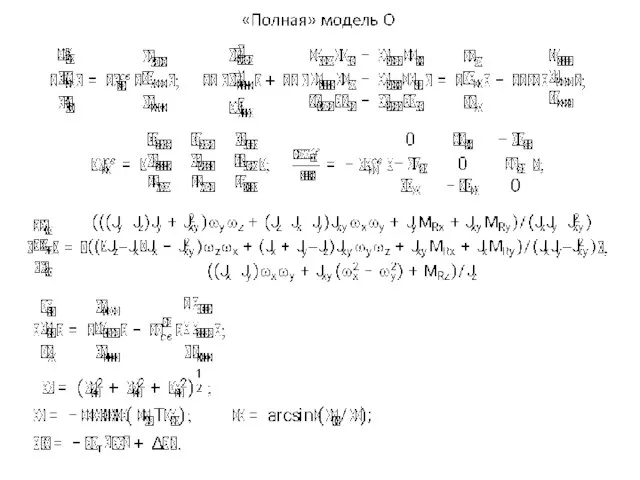
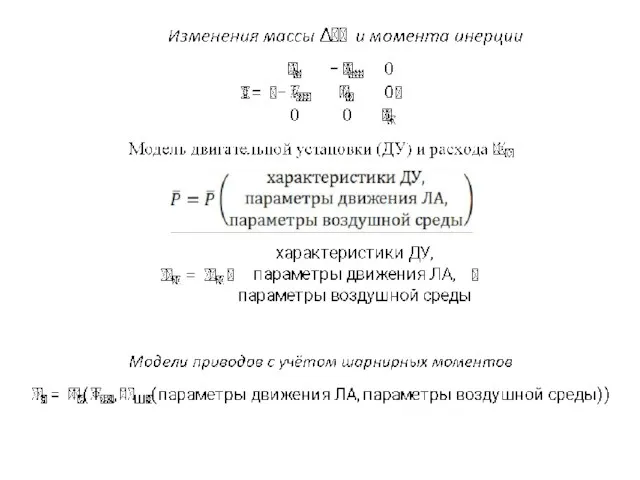
- 15. Модель объекта (с бортовой СУ): расчётная – со всеми возможными упрощениями; «полная» - для испытаний (проверок)
- 16. для синтеза алгоритмов управления
- 21. – сфера или плоскость (стандартная атмосфера ГОСТ 4401-81) – геоид – эллипсоид вращения Модель силы тяжести
- 25. Декомпозиции: Разделение каналов пространственного движения Стабилизация и траекторное управление
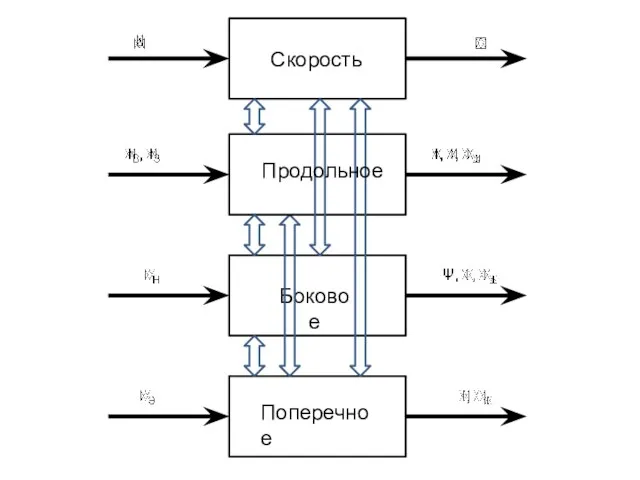
- 26. Продольное Боковое Поперечное
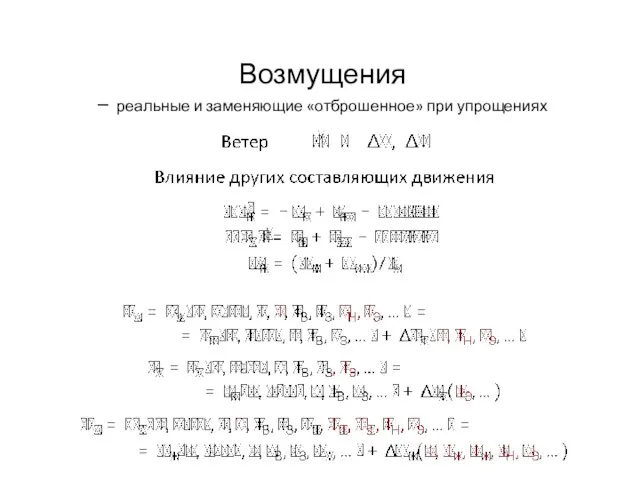
- 29. Возмущения – реальные и заменяющие «отброшенное» при упрощениях
- 30. Возмущения ветровые – независимые от движения, возмущения от других каналов – зависят в том числе и
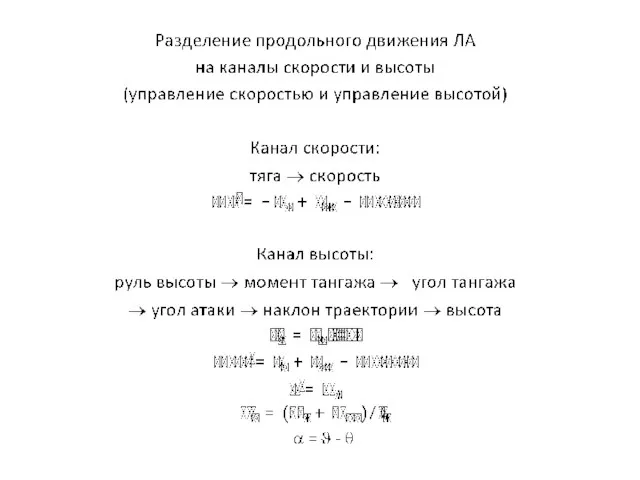
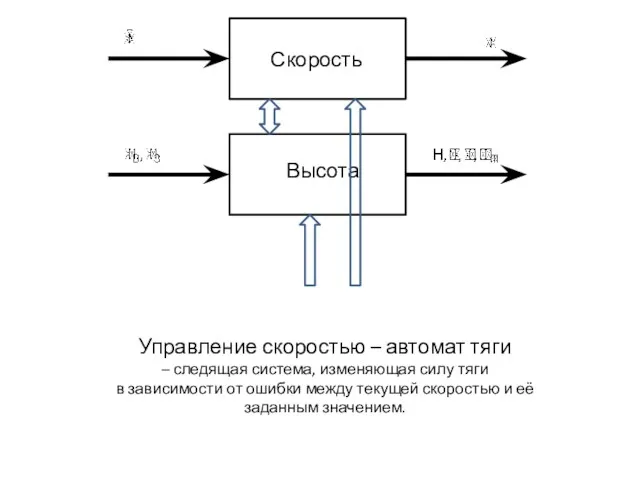
- 32. Продольное Высота Скорость Управление скоростью – автомат тяги – следящая система, изменяющая силу тяги в зависимости
- 33. Продольное Боковое Поперечное Продольное Скорость
- 34. Продольное Боковое (скольжение) Поперечное (крен) Продольное Скорость Боковое Боковое
- 35. Основной принцип аэродинамического управления высотой ЛА – изменение угла наклона траектории изменением подъёмной силы путём изменения
- 37. Возможный алгоритм управления высотой: - по разнице между заданной и текущей высотой задаётся угол наклона траектории,
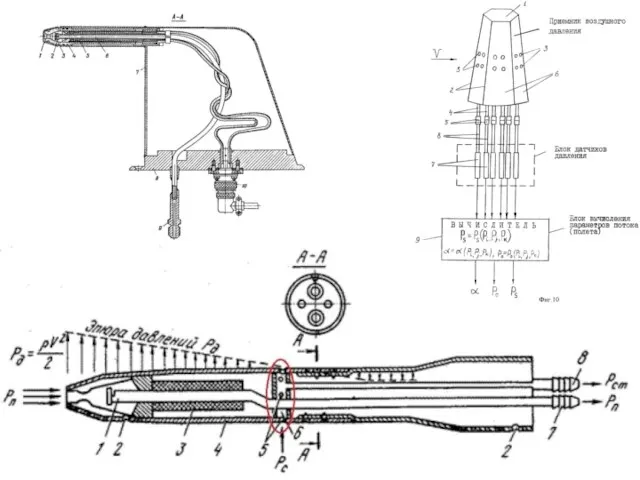
- 38. Измерения: высоты (высотомеры (альтиметры) – барометрические и радиовысотомеры); ускорения (ДЛУ – датчики линейных ускорений, акселерометры); угла
- 41. Измерения угла наклона траектории? Измерение линейного ускорения (перегрузки), угла атаки или угла тангажа Традиционно – перегрузочный
- 42. Управление высотой тангажным автопилотом: по разнице между заданной и текущей высотой задаётся угол тангажа, «отработка» которого
- 44. Управление высотой перегрузочным автопилотом: по разнице между заданной и текущей высотой задаётся перегрузка, «отработка» которой осуществляется
- 46. Управление высотой изменением угловой скорости: по разнице между заданной и текущей высотой задаётся угловая скорость ЛА,
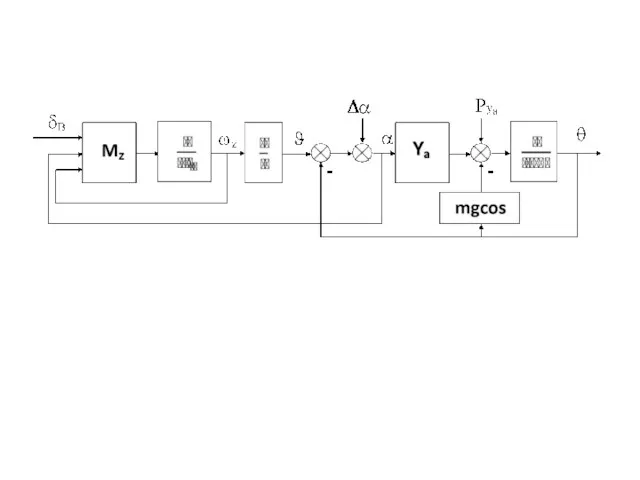
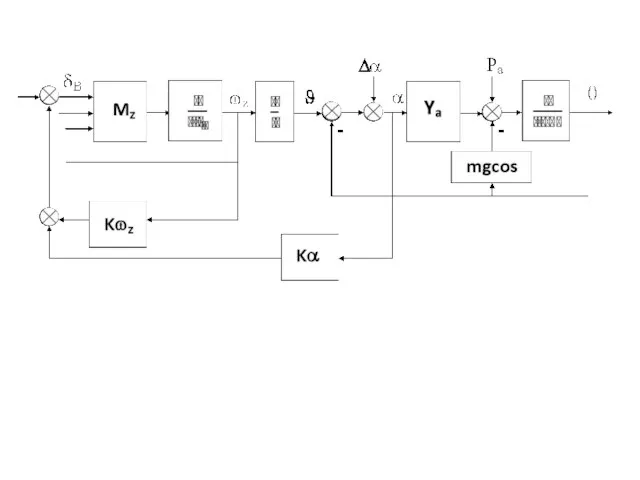
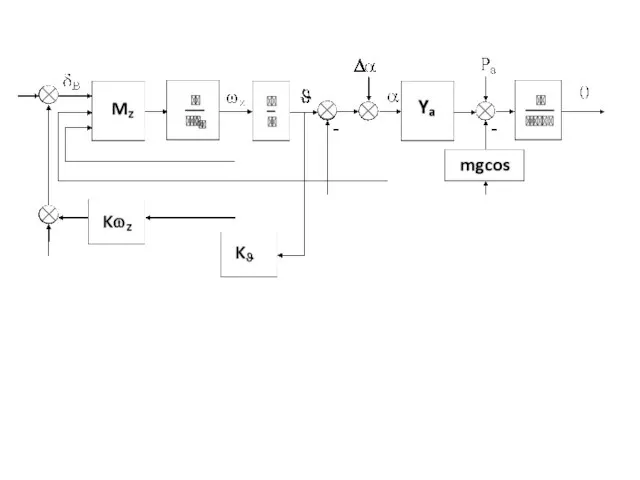
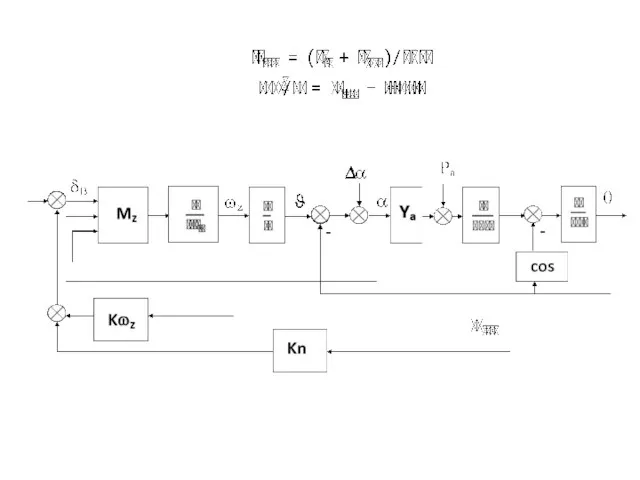
- 48. Контур управления угловым движением (устойчивости и управляемости)
- 57. Скачать презентацию
Особенности для различных аэродинамических типов ЛА:
планирующие (самолёты)
мультироторные (коптеры)
Особенности для различных аэродинамических типов ЛА:
планирующие (самолёты)
мультироторные (коптеры)

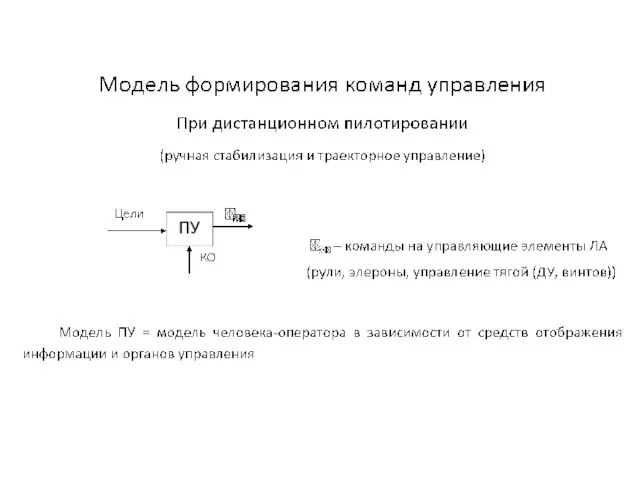
Основной принцип аэродинамического управления
ЛА планирующего типа
– создание (изменение) поперечных сил
Основной принцип аэродинамического управления
ЛА планирующего типа
– создание (изменение) поперечных сил
Основной принцип управления
мультироторных ЛА и винтокрылых ЛА со струйным управлением
(вектор
Основной принцип управления
мультироторных ЛА и винтокрылых ЛА со струйным управлением
(вектор


Основной принцип аэродинамического управления
ЛА вертолётного типа
– создание (изменение) горизонтальных («пропульсивных»)
Основной принцип аэродинамического управления
ЛА вертолётного типа
– создание (изменение) горизонтальных («пропульсивных»)
Создание моделей
и исследование динамических свойств разрабатываемой системы
Создание моделей
и исследование динамических свойств разрабатываемой системы
Модель линий связи без учёта помех
Модель помех с учётом их обработки
(статистическая)
Модель линий связи без учёта помех
Модель помех с учётом их обработки
(статистическая)
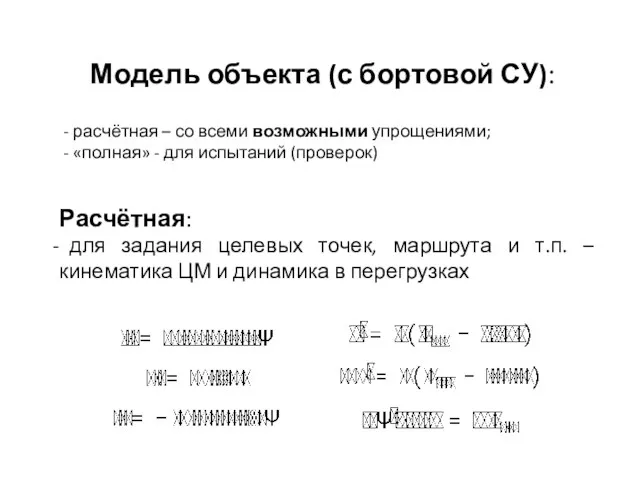
Модель объекта (с бортовой СУ):
расчётная – со всеми возможными упрощениями;
Модель объекта (с бортовой СУ):
расчётная – со всеми возможными упрощениями;
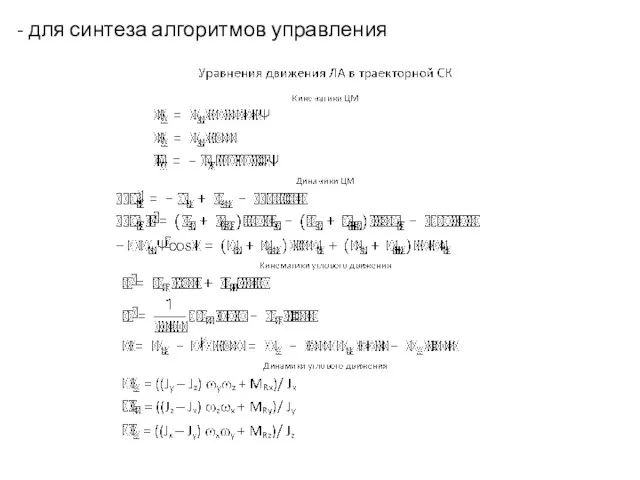
для синтеза алгоритмов управления
для синтеза алгоритмов управления
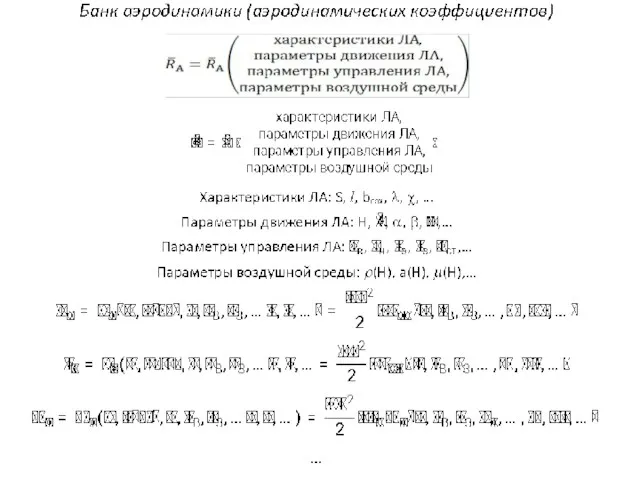
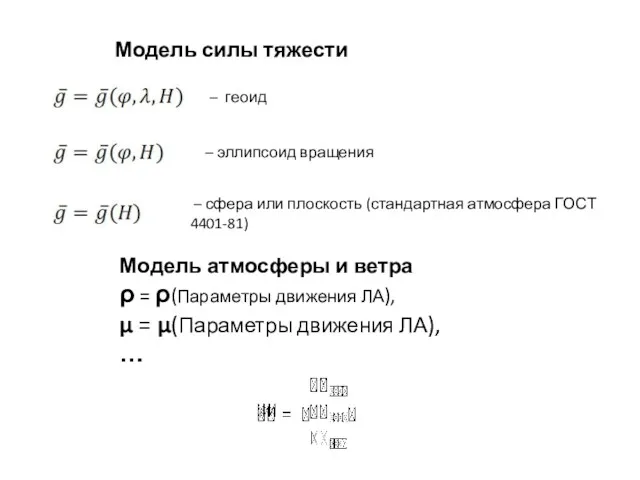
– сфера или плоскость (стандартная атмосфера ГОСТ 4401-81)
–
– сфера или плоскость (стандартная атмосфера ГОСТ 4401-81)
–
Декомпозиции:
Разделение каналов пространственного движения
Стабилизация и траекторное управление
Декомпозиции:
Разделение каналов пространственного движения
Стабилизация и траекторное управление
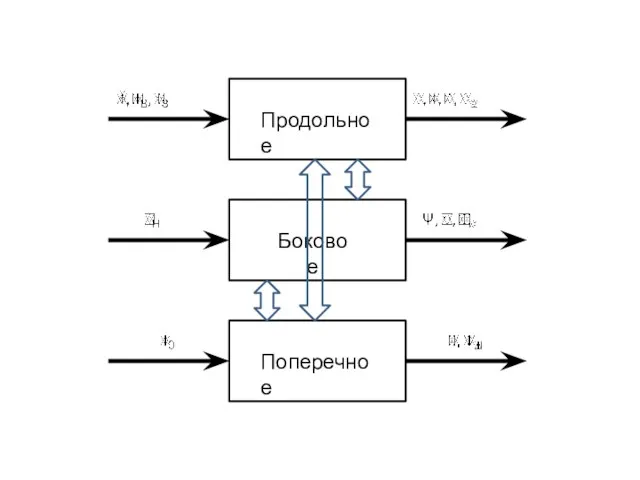
Продольное
Боковое
Поперечное
Продольное
Боковое
Поперечное

Возмущения
– реальные и заменяющие «отброшенное» при упрощениях
Возмущения
– реальные и заменяющие «отброшенное» при упрощениях
Возмущения ветровые – независимые от движения,
возмущения от других каналов – зависят
Возмущения ветровые – независимые от движения,
возмущения от других каналов – зависят
Продольное
Высота
Скорость
Управление скоростью – автомат тяги
– следящая система, изменяющая силу тяги
в зависимости
Продольное
Высота
Скорость
Управление скоростью – автомат тяги
– следящая система, изменяющая силу тяги
в зависимости
Продольное
Боковое
Поперечное
Продольное
Скорость
Продольное
Боковое
Поперечное
Продольное
Скорость
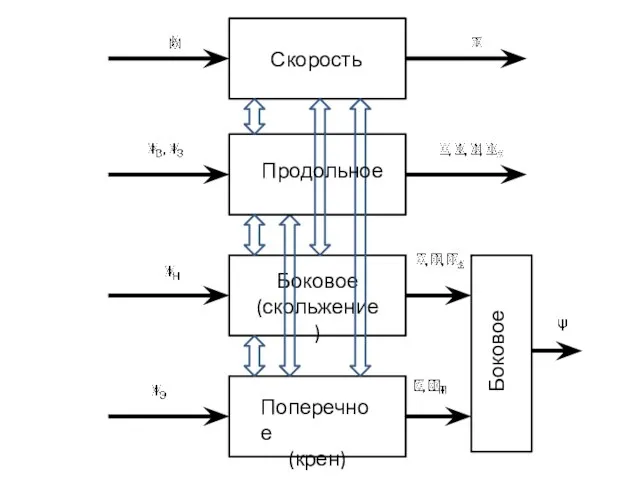
Продольное
Боковое
(скольжение)
Поперечное
(крен)
Продольное
Скорость
Боковое
Боковое
Продольное
Боковое
(скольжение)
Поперечное
(крен)
Продольное
Скорость
Боковое
Боковое
Основной принцип аэродинамического управления высотой ЛА
– изменение угла наклона траектории
Основной принцип аэродинамического управления высотой ЛА
– изменение угла наклона траектории
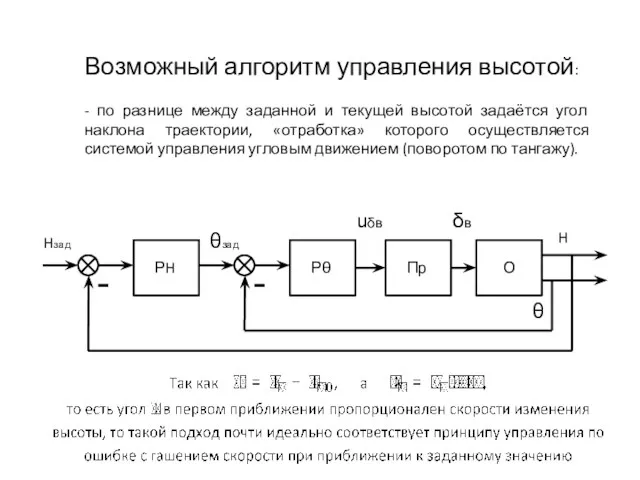
Возможный алгоритм управления высотой:
- по разнице между заданной и текущей высотой
Возможный алгоритм управления высотой:
- по разнице между заданной и текущей высотой
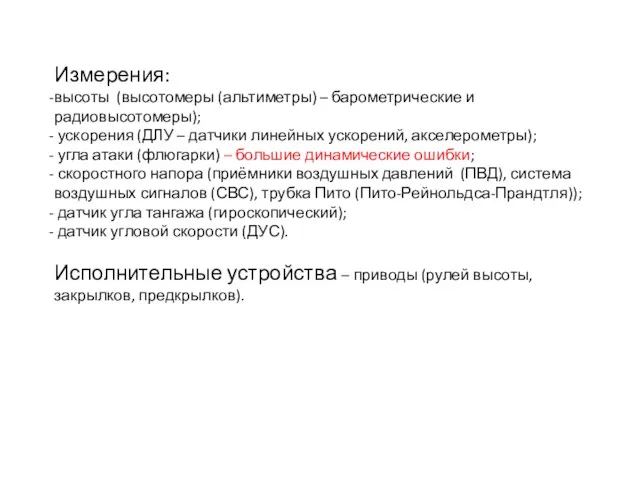
Измерения:
высоты (высотомеры (альтиметры) – барометрические и радиовысотомеры);
ускорения (ДЛУ – датчики
Измерения:
высоты (высотомеры (альтиметры) – барометрические и радиовысотомеры);
ускорения (ДЛУ – датчики

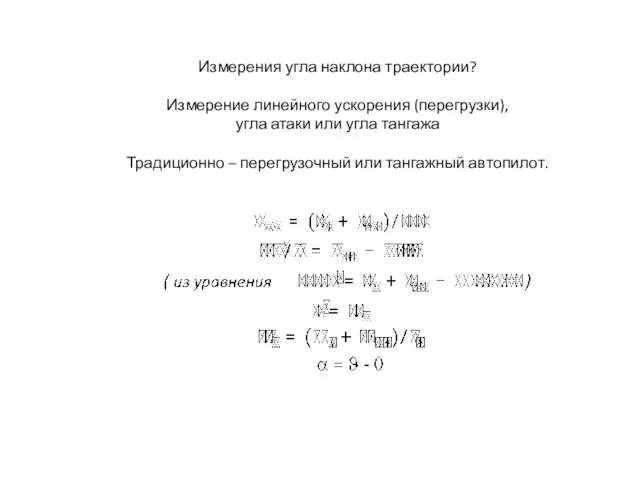
Измерения угла наклона траектории?
Измерение линейного ускорения (перегрузки),
угла атаки или угла
Измерения угла наклона траектории?
Измерение линейного ускорения (перегрузки),
угла атаки или угла
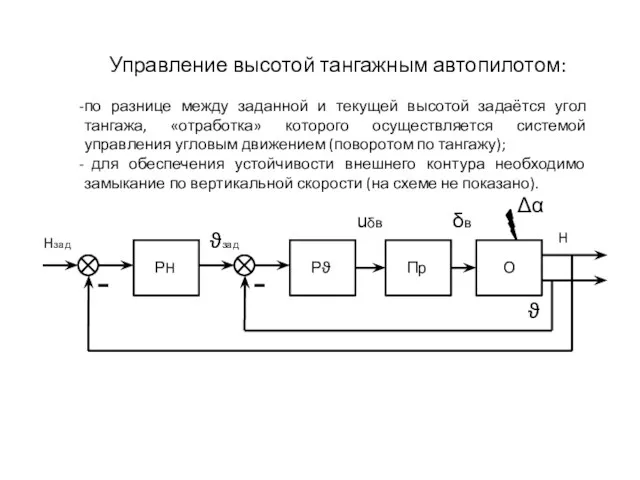
Управление высотой тангажным автопилотом:
по разнице между заданной и текущей высотой задаётся
Управление высотой тангажным автопилотом:
по разнице между заданной и текущей высотой задаётся
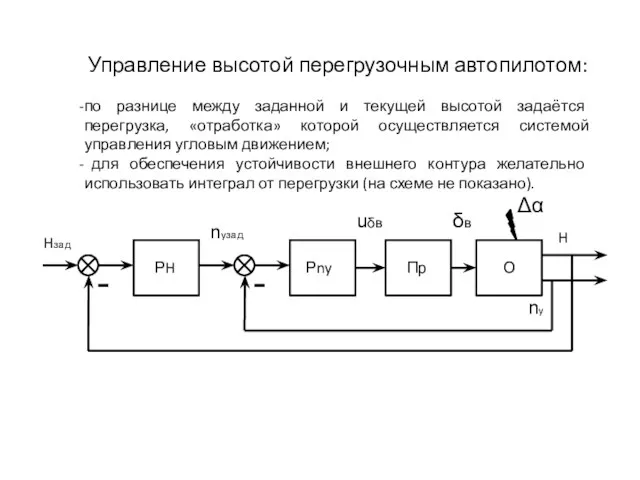
Управление высотой перегрузочным автопилотом:
по разнице между заданной и текущей высотой задаётся
Управление высотой перегрузочным автопилотом:
по разнице между заданной и текущей высотой задаётся
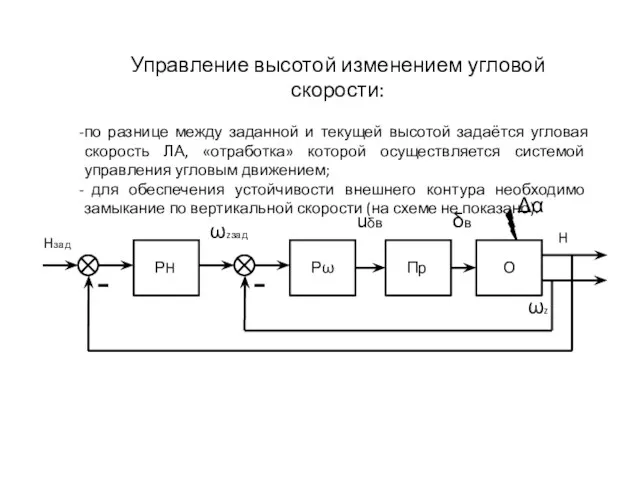
Управление высотой изменением угловой скорости:
по разнице между заданной и текущей высотой
Управление высотой изменением угловой скорости:
по разнице между заданной и текущей высотой
Контур управления угловым движением
(устойчивости и управляемости)
Контур управления угловым движением
(устойчивости и управляемости)
 Презентация по физике Оптические иллюзии
Презентация по физике Оптические иллюзии Законы отражения
Законы отражения Ядерные реакции
Ядерные реакции Механические волны. Виды волн
Механические волны. Виды волн Ығысу Тогы. Максвелдің екінші теңдеуі
Ығысу Тогы. Максвелдің екінші теңдеуі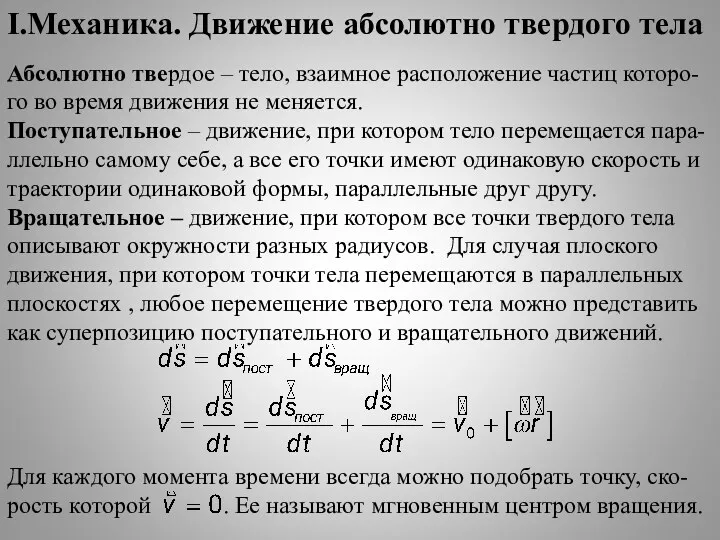 Механика. Движение абсолютно твердого тела. Лекция 7
Механика. Движение абсолютно твердого тела. Лекция 7 Работа по перемещению проводника с током в магнитном поле
Работа по перемещению проводника с током в магнитном поле Динамика поступательного движения. Законы сохранения
Динамика поступательного движения. Законы сохранения Плавание тел в жидкости
Плавание тел в жидкости Специальные вопросы электроснабжения. Изоляция и перенапряжения
Специальные вопросы электроснабжения. Изоляция и перенапряжения Механическое движение. Плотность вещества. 7 класс
Механическое движение. Плотность вещества. 7 класс Жылуалмасу теориясының негізгі ережелері. Жылудың жылуөткізгіштікпен берілуі
Жылуалмасу теориясының негізгі ережелері. Жылудың жылуөткізгіштікпен берілуі Звук и его характеристики.
Звук и его характеристики. Общая химия. Химическая термодинамика. Первый закон термодинамики. Термохимия
Общая химия. Химическая термодинамика. Первый закон термодинамики. Термохимия Заклёпочные соединения
Заклёпочные соединения Циклы теплосиловых установок. Термодинамическая эффективность циклов теплосиловых установок. (Занятие 7)
Циклы теплосиловых установок. Термодинамическая эффективность циклов теплосиловых установок. (Занятие 7) Качер Бровина
Качер Бровина Генератор переменного тока
Генератор переменного тока Основные понятия и определения в электротехнике
Основные понятия и определения в электротехнике Особенности ядерных реакций
Особенности ядерных реакций урок-игра по физике по теме Плотность
урок-игра по физике по теме Плотность План-конспект урока по физике по теме Сила 7 класс
План-конспект урока по физике по теме Сила 7 класс Работа и мощность электрического поля. Закон Джоуля - Ленца
Работа и мощность электрического поля. Закон Джоуля - Ленца Тербелістер мен толқындар
Тербелістер мен толқындар Испарение и конденсация
Испарение и конденсация Управление нефтегазовыми технологическими процессами
Управление нефтегазовыми технологическими процессами Механическое движение. Плотность вещества
Механическое движение. Плотность вещества Сила трения
Сила трения