- Инерциальные навигационные системы. (Тема 3)

Содержание
- 2. План: История; 1) Назначение и основные функции 2) Физические принципы инерциальной навигации; 3) Классификация ИНС; 4)
- 3. История Принципы инерциальной навигации базируются на сформулированных ещё Ньютоном законах механики, которым подчиняется движение тел по
- 4. Практическая реализация методов инерциальной навигации была связана со значительными трудностями, вызываемыми необходимостью обеспечить высокую точность и
- 5. 1. Особенности инерциальных навигационных систем Инерциальные навигационные системы (ИНС) — это точные автоматические устройства, основанные на
- 6. ИНС имеют перед другими навигационными системами важные преимущества — универсальность применения, возможность определения основных параметров движения
- 8. 2. Принципы определения текущих координат, скорости ЛА и построения вертикали в ИНС Рассмотрим движение ЛА в
- 9. Рассмотрим принцип построения вертикали на ЛА. Эта задача является обратной задаче определения. Если ЛА переместится из
- 11. 2. Метод инерциальной навигации и инерциальные навигационные системы (ИНС) в настоящее время находят широкое применение для
- 12. 2 . Физические принципы инерциальной навигации неразрывно связаны с реше- нием основной задачи динамики: при известных
- 13. Различают платформенные (когда измерительные акселерометры установлены на стабилизированной в плоскости горизонта платформе) и бесплатформенные инерциальные системы.
- 14. Типы ИНС: 1. Инерциальная система геометрического типа имеет две платформы. Одна платформа с гироскопами ориентирована и
- 15. 3. Полуаналитическая система имеет платформу, которая непрерывно стабилизируется по местному горизонту. На платформе имеются гироскопы и
- 16. Инерциальная система типа И-11 Инерциальная система является системой навигации и предназначена для решения задач самолетовождения. Система
- 17. — определение и индикацию времени полета и оставшегося расстояния до очередного промежуточного пункта маршрута, географические координаты
- 19. Бесплатформенная инерциальная навигационная система И42-1С (БИНС) Эта навигационная система устанавливается на самолетах Ту-204 и Ил-96-300 и
- 20. 4 . Характерные особенности и условия построения различного типа ИНС В общем случае при построении инерциальных
- 21. В связи с этим в состав любой инерциальной системы входят следующие функциональные элементы: -система акселерометров, измеряющая
- 24. Инерциальные навигационные системы (ИНС) имеют в своём составе датчики линейного ускорения (акселерометры) и угловой скорости (гироскопы
- 27. Скачать презентацию
План:
История;
1) Назначение и основные функции
2) Физические принципы инерциальной навигации;
3) Классификация ИНС;
4)
План:
История;
1) Назначение и основные функции
2) Физические принципы инерциальной навигации;
3) Классификация ИНС;
4)
История
Принципы инерциальной навигации базируются на сформулированных ещё Ньютоном законах
История
Принципы инерциальной навигации базируются на сформулированных ещё Ньютоном законах
Практическая реализация методов инерциальной навигации была связана со значительными трудностями, вызываемыми
Практическая реализация методов инерциальной навигации была связана со значительными трудностями, вызываемыми
1. Особенности инерциальных навигационных систем
Инерциальные навигационные системы (ИНС) — это точные
1. Особенности инерциальных навигационных систем
Инерциальные навигационные системы (ИНС) — это точные
ИНС имеют перед другими навигационными системами важные преимущества — универсальность применения,
ИНС имеют перед другими навигационными системами важные преимущества — универсальность применения,

2. Принципы определения текущих координат, скорости ЛА и построения вертикали в
2. Принципы определения текущих координат, скорости ЛА и построения вертикали в
Рассмотрим принцип построения вертикали на ЛА. Эта задача является обратной задаче
Рассмотрим принцип построения вертикали на ЛА. Эта задача является обратной задаче

2. Метод инерциальной навигации и инерциальные навигационные системы (ИНС) в настоящее
2. Метод инерциальной навигации и инерциальные навигационные системы (ИНС) в настоящее
2 . Физические принципы инерциальной навигации неразрывно связаны с реше- нием
2 . Физические принципы инерциальной навигации неразрывно связаны с реше- нием
Различают платформенные (когда измерительные акселерометры установлены на стабилизированной в плоскости горизонта
Различают платформенные (когда измерительные акселерометры установлены на стабилизированной в плоскости горизонта
Типы ИНС:
1. Инерциальная система геометрического типа имеет две платформы. Одна платформа
Типы ИНС:
1. Инерциальная система геометрического типа имеет две платформы. Одна платформа
3. Полуаналитическая система имеет платформу, которая непрерывно стабилизируется по местному горизонту.
3. Полуаналитическая система имеет платформу, которая непрерывно стабилизируется по местному горизонту.
Инерциальная система типа И-11
Инерциальная система является системой навигации и предназначена для
Инерциальная система типа И-11
Инерциальная система является системой навигации и предназначена для
— определение и индикацию времени полета и оставшегося расстояния до очередного
— определение и индикацию времени полета и оставшегося расстояния до очередного

Бесплатформенная инерциальная навигационная система И42-1С (БИНС)
Эта навигационная система устанавливается на самолетах
Бесплатформенная инерциальная навигационная система И42-1С (БИНС)
Эта навигационная система устанавливается на самолетах
4 . Характерные особенности и условия построения различного типа ИНС
В
4 . Характерные особенности и условия построения различного типа ИНС
В
В связи с этим в состав любой инерциальной системы входят следующие
В связи с этим в состав любой инерциальной системы входят следующие


Инерциальные навигационные системы (ИНС) имеют в своём составе датчики линейного ускорения
Инерциальные навигационные системы (ИНС) имеют в своём составе датчики линейного ускорения

 Лампа накаливания. История создания. Современная конструкция
Лампа накаливания. История создания. Современная конструкция Измерение влажности
Измерение влажности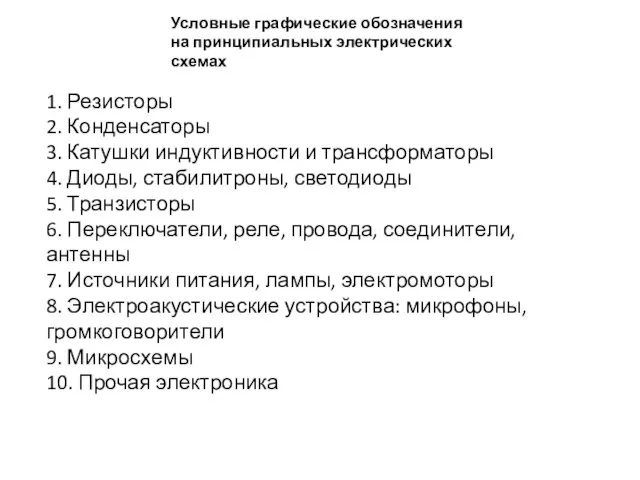 Условные графические обозначения на принципиальных электрических схемах
Условные графические обозначения на принципиальных электрических схемах Дисперсия
Дисперсия Бинарный урок - конференция по физике и химии
Бинарный урок - конференция по физике и химии Вертолет Ми-8МТВ. Несущий винт
Вертолет Ми-8МТВ. Несущий винт Осьові системи та інші механічні пристрої геодезичних приладів
Осьові системи та інші механічні пристрої геодезичних приладів Сглаживающие фильтры питания
Сглаживающие фильтры питания nanotehnologii_za_i_protiv
nanotehnologii_za_i_protiv Розв’язування задач за темою Рух тіла під дією кількох сил
Розв’язування задач за темою Рух тіла під дією кількох сил Манометры. Поршневой жидкостный насос. Гидравлический пресс. 7 класс
Манометры. Поршневой жидкостный насос. Гидравлический пресс. 7 класс Электрооборудование автомобилей. Контрольно-измерительные приборы. (Урок 10)
Электрооборудование автомобилей. Контрольно-измерительные приборы. (Урок 10) Проектирование участка шиномонтажных работ грузового автотранспортного предприятия
Проектирование участка шиномонтажных работ грузового автотранспортного предприятия урок по теме Дисперсия
урок по теме Дисперсия Итоговый видео тест по курсу Физика-8
Итоговый видео тест по курсу Физика-8 Исследование структуры. Оптическая и электронная микроскопия
Исследование структуры. Оптическая и электронная микроскопия Техническая термодинамика
Техническая термодинамика Реактивний рух в природі та техніці
Реактивний рух в природі та техніці Измерение атмосферного давления. К уроку по физике в 7 классе
Измерение атмосферного давления. К уроку по физике в 7 классе Шум как опасный фактор
Шум как опасный фактор Давление. Единицы давления
Давление. Единицы давления презентация к уроку Элементарные частицы
презентация к уроку Элементарные частицы Ампе́р, Вольт, Закон Ома. Характеристики резисторов
Ампе́р, Вольт, Закон Ома. Характеристики резисторов Свойства воздуха
Свойства воздуха Создание кроссвордов c триггерами в PowerPoint
Создание кроссвордов c триггерами в PowerPoint Свободное падение тел
Свободное падение тел Ядерные реакции
Ядерные реакции Передаточные функции и частотные характеристики АС
Передаточные функции и частотные характеристики АС