- Классификация систем автоматического регулирования

Содержание
- 2. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ по наличию обратной связи по изменению регулируемой величины по способности поддерживать значение регулируемой
- 3. Разомкнутые системы ЗУ - задающее устройство; У - усилитель; ИУ - исполнительное устройство; ОУ – объект
- 4. Разомкнутые системы Достоинства системы: 1) Простота 2) Малая инерционность 3) Быстродействие системы Недостатки: 1) Управление осуществляется
- 5. Замкнутые системы У - усилитель; ИУ - исполнительное устройство; g - задающее воздействие; U - управляющее
- 6. Замкнутые системы Достоинства: 1) Выработка регулирующего воздействия в независимости от возмущающего фактора 2) Учёт действительного параметра
- 7. Стабилизирующие системы Поддерживается постоянное значение регулируемой величины
- 8. Системы программного регулирования Изменение регулируемой величины обеспечивается изменением задающего воздействия по строго определенной программе.
- 9. Следящие системы Регулируемая величина изменяется в зависимости от неизвестной заранее переменной величины на входе автоматической системы.
- 10. Статические системы Не возможно поддержать одно и то же значение регулируемого параметра при условии, что задающее
- 11. Астатические системы Регулируемый параметр принимает всегда одно и то же значение и не зависит от значения
- 12. Непрерывные системы Непрерывному изменению входных величин элементов соответствует, непрерывное изменение выходных величин этих элементов.
- 13. Дискретные системы Непрерывному изменению входной величины, соответствует дискретное изменение выходной величины этого элемента.
- 15. Скачать презентацию
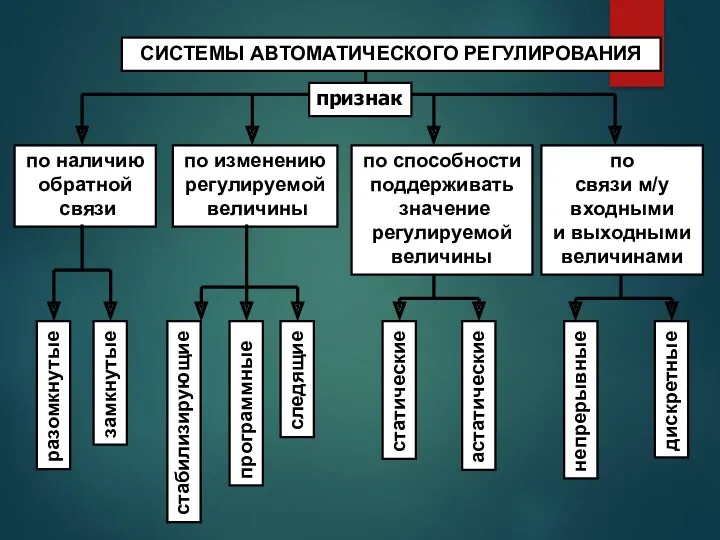
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
по наличию
обратной
связи
по изменению
регулируемой
величины
по способности
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
по наличию
обратной
связи
по изменению
регулируемой
величины
по способности
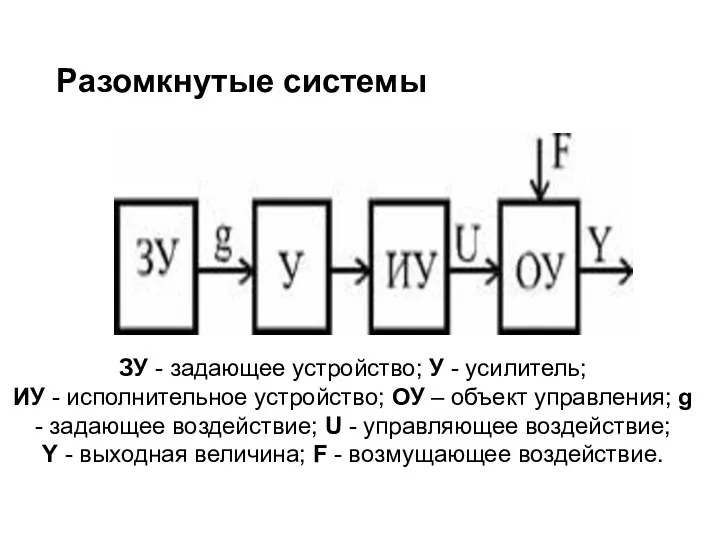
Разомкнутые системы
ЗУ - задающее устройство; У - усилитель;
ИУ - исполнительное
Разомкнутые системы
ЗУ - задающее устройство; У - усилитель;
ИУ - исполнительное
Разомкнутые системы
Достоинства системы:
1) Простота
2) Малая инерционность
3) Быстродействие системы
Недостатки:
1) Управление
Разомкнутые системы
Достоинства системы:
1) Простота
2) Малая инерционность
3) Быстродействие системы
Недостатки:
1) Управление
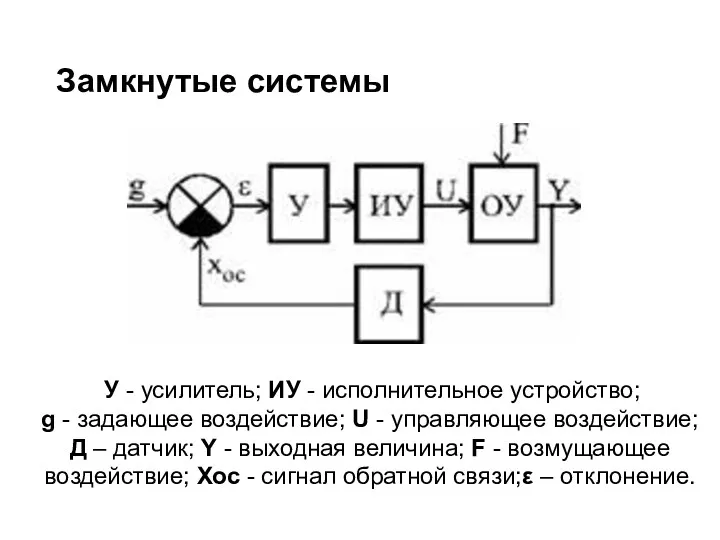
Замкнутые системы
У - усилитель; ИУ - исполнительное устройство;
g -
Замкнутые системы
У - усилитель; ИУ - исполнительное устройство;
g -
Замкнутые системы
Достоинства:
1) Выработка регулирующего воздействия в независимости от возмущающего
Замкнутые системы
Достоинства:
1) Выработка регулирующего воздействия в независимости от возмущающего

Стабилизирующие системы
Поддерживается постоянное значение регулируемой величины
Стабилизирующие системы
Поддерживается постоянное значение регулируемой величины

Системы программного регулирования
Изменение регулируемой величины обеспечивается изменением задающего воздействия по строго
Системы программного регулирования
Изменение регулируемой величины обеспечивается изменением задающего воздействия по строго

Следящие системы
Регулируемая величина изменяется в зависимости от неизвестной заранее переменной величины
Следящие системы
Регулируемая величина изменяется в зависимости от неизвестной заранее переменной величины

Статические системы
Не возможно поддержать одно и то же значение регулируемого
Статические системы
Не возможно поддержать одно и то же значение регулируемого

Астатические системы
Регулируемый параметр принимает всегда одно и то же значение и
Астатические системы
Регулируемый параметр принимает всегда одно и то же значение и

Непрерывные системы
Непрерывному изменению входных величин элементов соответствует, непрерывное изменение выходных
Непрерывные системы
Непрерывному изменению входных величин элементов соответствует, непрерывное изменение выходных

Дискретные системы
Непрерывному изменению входной величины, соответствует дискретное изменение выходной величины
Дискретные системы
Непрерывному изменению входной величины, соответствует дискретное изменение выходной величины
 Современные тепловые двигатели
Современные тепловые двигатели Схемы электрических соединений электрических станций и подстанций
Схемы электрических соединений электрических станций и подстанций Презентация Определение цены деления прибора 7 класс
Презентация Определение цены деления прибора 7 класс Разработка урока по теме Закон Кулона
Разработка урока по теме Закон Кулона Кинетическая и потенциальная энергия, работа, мощность
Кинетическая и потенциальная энергия, работа, мощность Происхождение элементов
Происхождение элементов Электропроводность диэлектриков
Электропроводность диэлектриков Матеріали дипломної роботи. Електропостачання житлового мікрорайону міста Дрогобич
Матеріали дипломної роботи. Електропостачання житлового мікрорайону міста Дрогобич Презентация к уроку Газовые законы 10 класс
Презентация к уроку Газовые законы 10 класс Квантовая механика
Квантовая механика Умови плавання тіл
Умови плавання тіл Ядерный реактор
Ядерный реактор Своя игра по теме Электрические явления. 8 класс
Своя игра по теме Электрические явления. 8 класс Презентация для урока Обнаружение магнитного поля по его действию на электрический ток. 9 класс
Презентация для урока Обнаружение магнитного поля по его действию на электрический ток. 9 класс Почему радуга разноцветная
Почему радуга разноцветная Лекция 41. Рентгеновская трубка. Эффект Комптона. Введение в квантовую механику
Лекция 41. Рентгеновская трубка. Эффект Комптона. Введение в квантовую механику ТО и ТР заднего моста
ТО и ТР заднего моста Презентация Механическая работа
Презентация Механическая работа Методическая разработка конспекта урока по теме Осторожно, электрический ток!
Методическая разработка конспекта урока по теме Осторожно, электрический ток! Проектирование фрагментов уроков физики с применением ЦОР
Проектирование фрагментов уроков физики с применением ЦОР интерференция света
интерференция света Механические напряжения и деформации в тонких пленках
Механические напряжения и деформации в тонких пленках Режимы работы промышленных электрических сетей
Режимы работы промышленных электрических сетей Физика и музыка
Физика и музыка Физическая спартакиада. Игра-соревнование
Физическая спартакиада. Игра-соревнование Презентация к урокупо теме Третий закон Ньютона, 9 кл.
Презентация к урокупо теме Третий закон Ньютона, 9 кл. Свободные и вынужденные колебания, колебательные системы
Свободные и вынужденные колебания, колебательные системы Особенности ядерных реакций
Особенности ядерных реакций