- Колебания и волны

Содержание
- 2. Гармонические колебания Гармонические колебания — колебания, при которых физическая величина изменяется с течением времени по закону
- 3. Гармонические колебания Так как косинус – периодическая функция, то состояние системы будет повторятся через некоторый промежуток
- 4. Математический маятник Математический маятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки на конце
- 5. Физический маятник Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил
- 6. Затухающие колебания Гармонические колебания описывались действием только квазиупругих сил. Если в системе присутствуют диссипативные силы, то
- 7. Вынужденные колебания Вынужденные колебания – колебания, которые возникают в системе под действием внешней периодической силы. Рассмотрим
- 9. Скачать презентацию
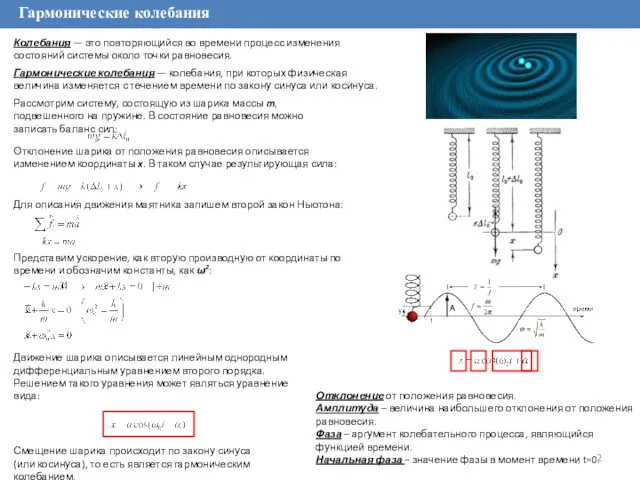
Гармонические колебания
Гармонические колебания — колебания, при которых физическая величина изменяется с течением
Гармонические колебания
Гармонические колебания — колебания, при которых физическая величина изменяется с течением
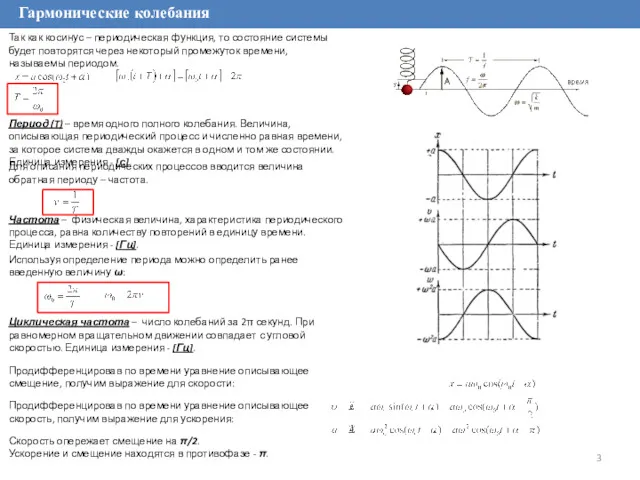
Гармонические колебания
Так как косинус – периодическая функция, то состояние системы будет
Гармонические колебания
Так как косинус – периодическая функция, то состояние системы будет
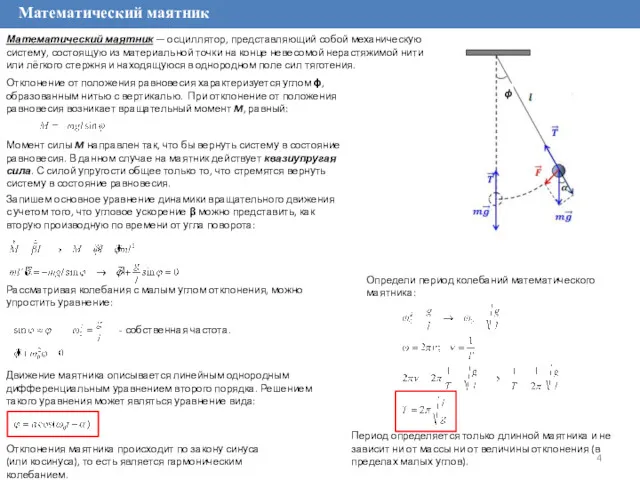
Математический маятник
Математический маятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки на конце невесомой
Математический маятник
Математический маятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки на конце невесомой
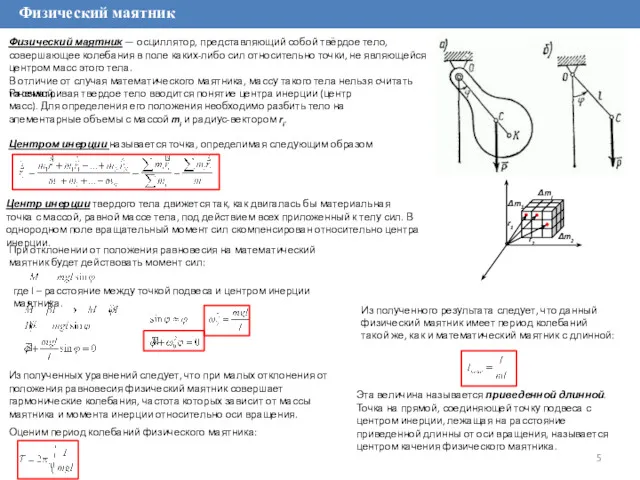
Физический маятник
Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле
Физический маятник
Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле
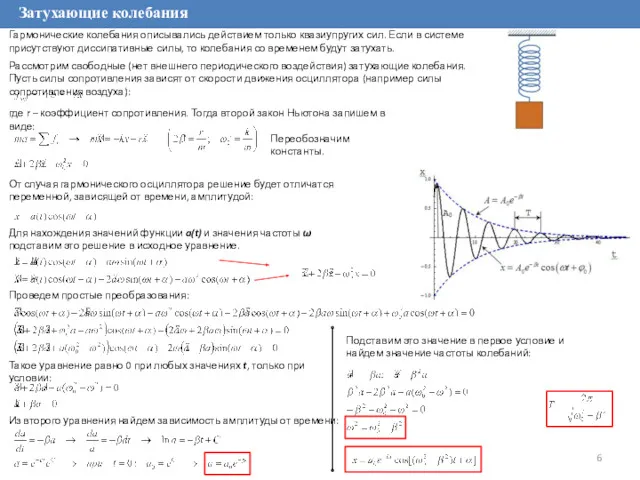
Затухающие колебания
Гармонические колебания описывались действием только квазиупругих сил. Если в системе
Затухающие колебания
Гармонические колебания описывались действием только квазиупругих сил. Если в системе
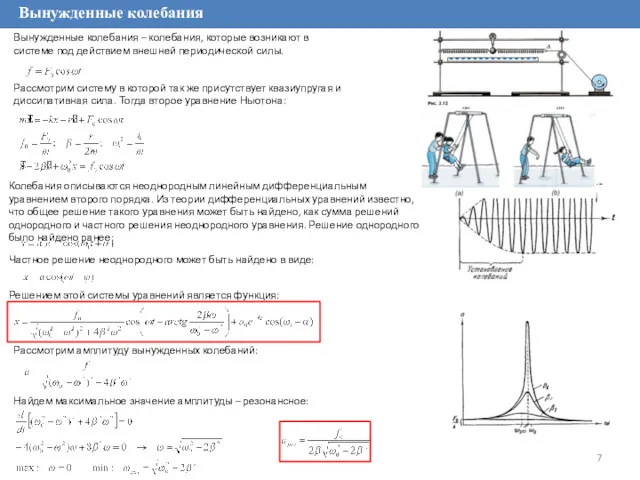
Вынужденные колебания
Вынужденные колебания – колебания, которые возникают в системе под действием
Вынужденные колебания
Вынужденные колебания – колебания, которые возникают в системе под действием
 Гидравлический пресс.
Гидравлический пресс. Лекция 8. Магнитоэлектрические приборы
Лекция 8. Магнитоэлектрические приборы Эксперименты по физике
Эксперименты по физике Урок по физике на тему Развитие средств связи
Урок по физике на тему Развитие средств связи Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Механические колебания
Механические колебания Физические основы оптической локации
Физические основы оптической локации ВКР: Границы использования аналитических моделей в диссипативной среде с усредненными параметрами биологической ткани
ВКР: Границы использования аналитических моделей в диссипативной среде с усредненными параметрами биологической ткани Эффект Доплера
Эффект Доплера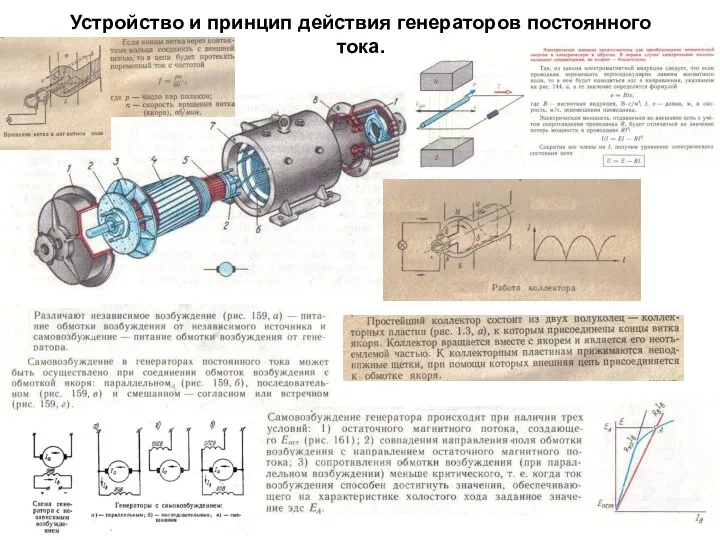 Устройство и принцип действия генераторов постоянного тока на судне. (Билет 9)
Устройство и принцип действия генераторов постоянного тока на судне. (Билет 9) Электроемкость. Конденсаторы
Электроемкость. Конденсаторы Презентация по физике для 7 класса по теме Простые механизмы
Презентация по физике для 7 класса по теме Простые механизмы Полупроводниковые материалы
Полупроводниковые материалы Исследовательская деятельность как интеграция физики и информатики
Исследовательская деятельность как интеграция физики и информатики Поверхностное натяжение
Поверхностное натяжение Автомобильные двигатели и виды топлива к ним
Автомобильные двигатели и виды топлива к ним Потери в электрических сетях
Потери в электрических сетях Линейный компрессор. Сервисное руководство
Линейный компрессор. Сервисное руководство Реальные газы. Тема 11
Реальные газы. Тема 11 Система работы учителя по подготовке учащихся к итоговой аттестации по физике
Система работы учителя по подготовке учащихся к итоговой аттестации по физике Закон Ома для участка цепи
Закон Ома для участка цепи Радио
Радио Junjis. Engineer Traning
Junjis. Engineer Traning Презентация к Научно-исследовательской работе Физика и ВОВ
Презентация к Научно-исследовательской работе Физика и ВОВ Презентация 10 класса Газовые законы
Презентация 10 класса Газовые законы КАБИНЕТ ФИЗИКИ
КАБИНЕТ ФИЗИКИ Электромагнитные колебания
Электромагнитные колебания Взаимосвязь массы и энергии покоя
Взаимосвязь массы и энергии покоя