- Колебания. Виды колебаний

Содержание
- 2. Колебания почти всегда связаны с попеременным превращением энергии одной формы проявления в другую форму. Колебания различной
- 3. Виды колебаний Свободные Вынужденные Гармонические Резонанс Автоколебания Параметрические
- 4. Свободные колебания Свободные колебания (или собственные колебания) — это колебания колебательной системы, совершаемые только благодаря первоначально
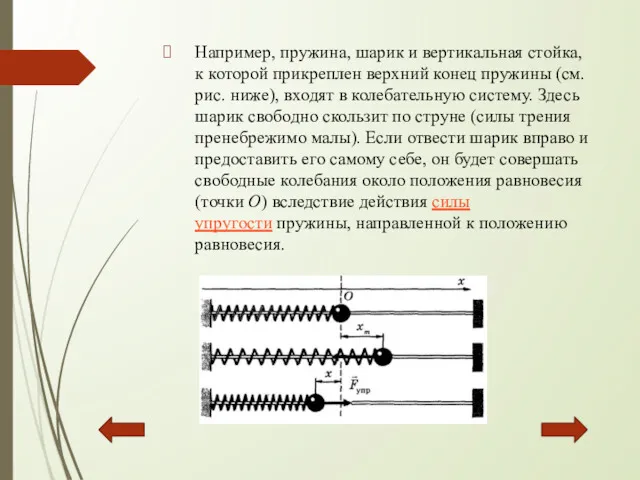
- 5. Например, пружина, шарик и вертикальная стойка, к которой прикреплен верхний конец пружины (см. рис. ниже), входят
- 6. Другим классическим примером механической колебательной системы является математический маятник (см. рис. ниже). В данном случае шарик
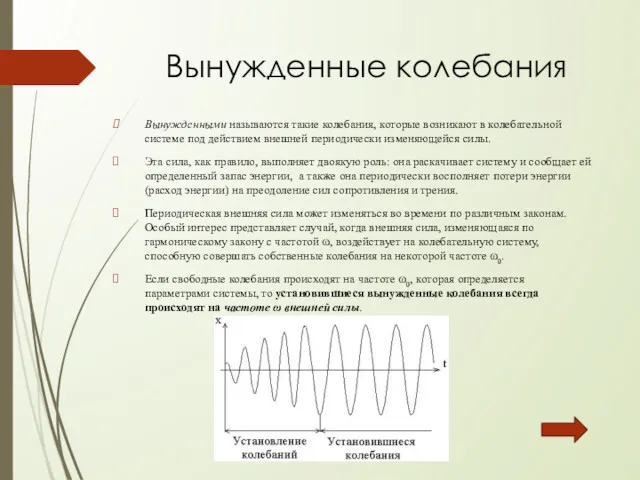
- 7. Вынужденные колебания Вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся
- 8. После начала воздействия внешней силы на колебательную систему необходимо некоторое время Δt для установления вынужденных колебаний.
- 9. Если частота ω внешней силы приближается к собственной частоте ω0, возникает резкое возрастание амплитуды вынужденных колебаний.
- 10. Гармонические колебания
- 11. На рисунке изображены положения тела через одинаковые промежутки времени при гармонических колебаниях. Такую картину можно получить
- 12. Резонанс Резонанс — явление, при котором амплитуда вынужденных колебаний имеет максимум при некотором значении частоты вынуждающей
- 13. На явлении резонанса основало действие прибора, предназначенного для определения частоты переменного тока, сила которого изменяется по
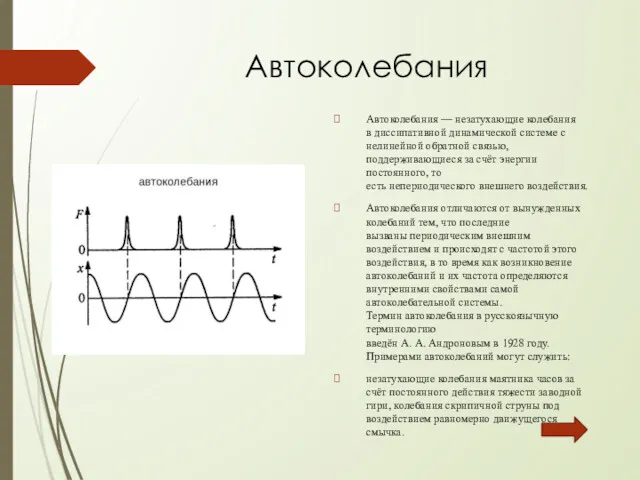
- 14. Автоколебания Автоколебания — незатухающие колебания в диссипативной динамической системе с нелинейной обратной связью, поддерживающиеся за счёт
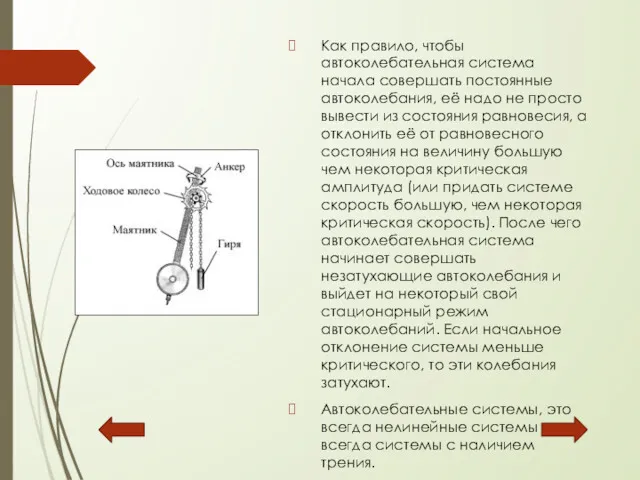
- 15. Как правило, чтобы автоколебательная система начала совершать постоянные автоколебания, её надо не просто вывести из состояния
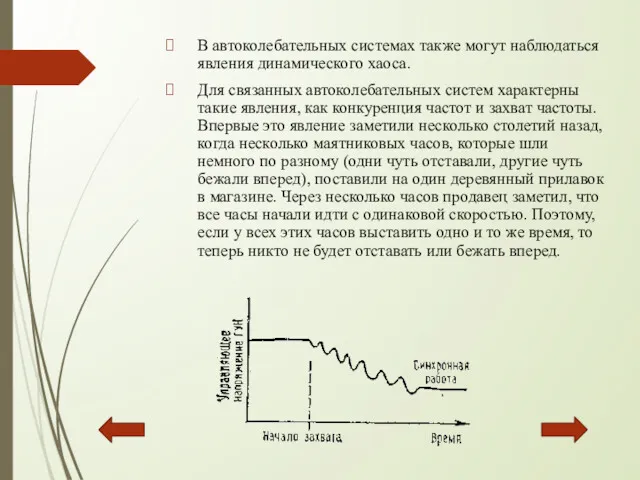
- 16. В автоколебательных системах также могут наблюдаться явления динамического хаоса. Для связанных автоколебательных систем характерны такие явления,
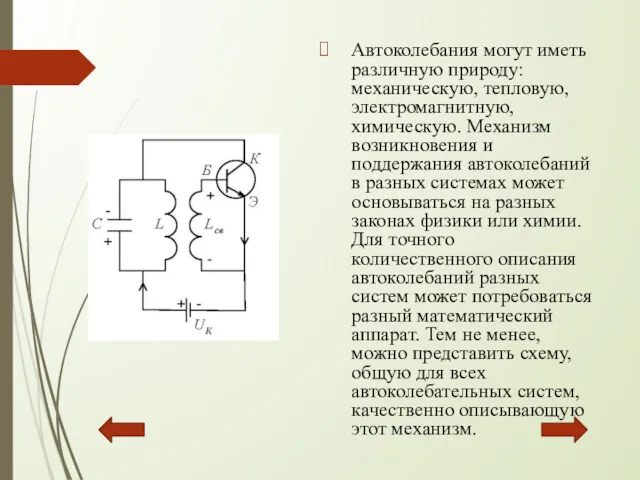
- 17. Автоколебания могут иметь различную природу: механическую, тепловую, электромагнитную, химическую. Механизм возникновения и поддержания автоколебаний в разных
- 18. Если колеблющийся элемент системы способен к собственным затухающим колебаниям , автоколебания устанавливаются на частоте, близкой к
- 19. Автоколебательные системы, не содержащие гармонических осцилляторов, называются релаксационными. Колебания в них могут сильно отличаться от гармонических,
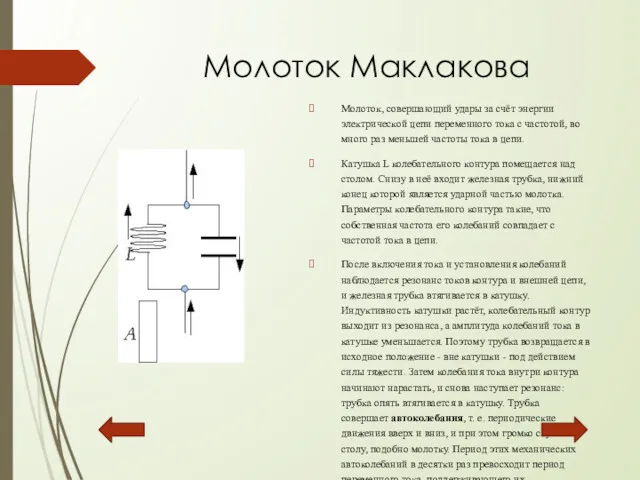
- 20. Молоток Маклакова Молоток, совершающий удары за счёт энергии электрической цепи переменного тока с частотой, во много
- 21. В сильно нелинейных колебательных системах с двумя и более степенями свободы может происходить стохастизация колебаний. Для
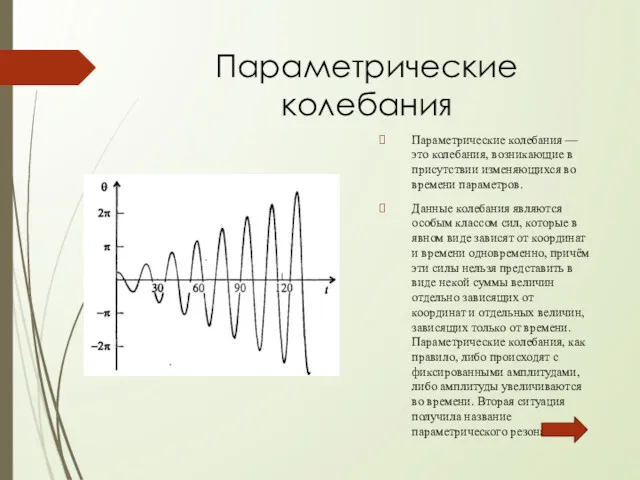
- 22. Параметрические колебания Параметрические колебания — это колебания, возникающие в присутствии изменяющихся во времени параметров. Данные колебания
- 23. Параметрические колебания имеют вид: В простейшем случае, для системы с одной степенью свободы для малых отклонений
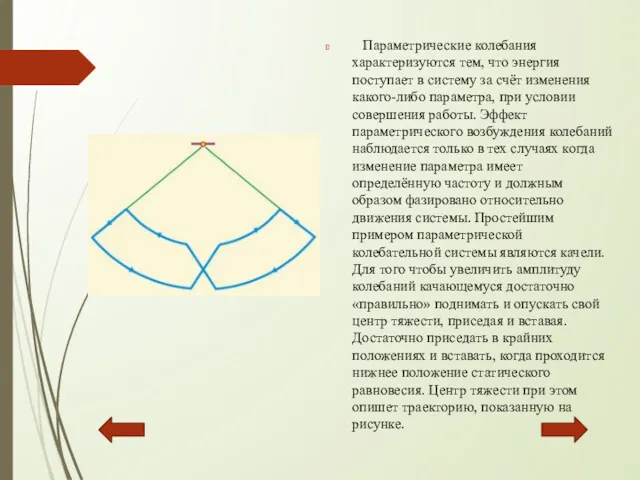
- 24. Параметрические колебания характеризуются тем, что энергия поступает в систему за счёт изменения какого-либо параметра, при условии
- 25. Другим классическим примером параметрических колебаний является знаменитый опыт, поставленный профессором Мельде в 1859 г. Натянутая струна
- 26. Рассмотрим простую модельную систему: колебательный контур с переменной емкостью, где мгновенные значения заряда и напряжения на
- 28. Скачать презентацию
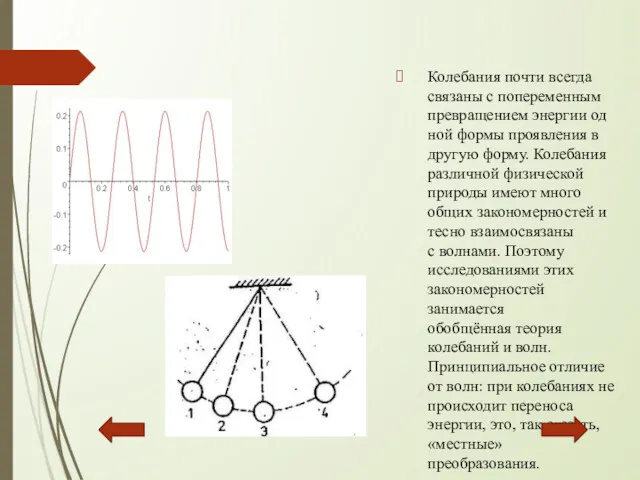
Колебания почти всегда связаны с попеременным превращением энергии одной формы проявления в другую
Колебания почти всегда связаны с попеременным превращением энергии одной формы проявления в другую
Виды колебаний
Свободные
Вынужденные
Гармонические
Резонанс
Автоколебания
Параметрические
Виды колебаний
Свободные
Вынужденные
Гармонические
Резонанс
Автоколебания
Параметрические
Свободные колебания
Свободные колебания (или собственные колебания) — это колебания колебательной системы, совершаемые только
Свободные колебания
Свободные колебания (или собственные колебания) — это колебания колебательной системы, совершаемые только
Например, пружина, шарик и вертикальная стойка, к которой прикреплен верхний конец
Например, пружина, шарик и вертикальная стойка, к которой прикреплен верхний конец
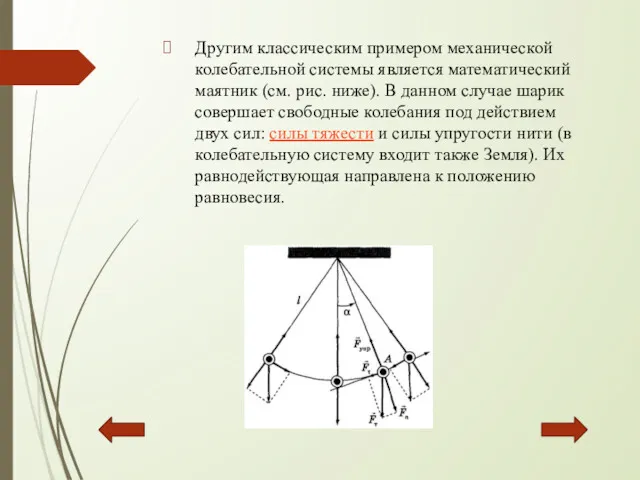
Другим классическим примером механической колебательной системы является математический маятник (см. рис.
Другим классическим примером механической колебательной системы является математический маятник (см. рис.
Вынужденные колебания
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием
Вынужденные колебания
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием
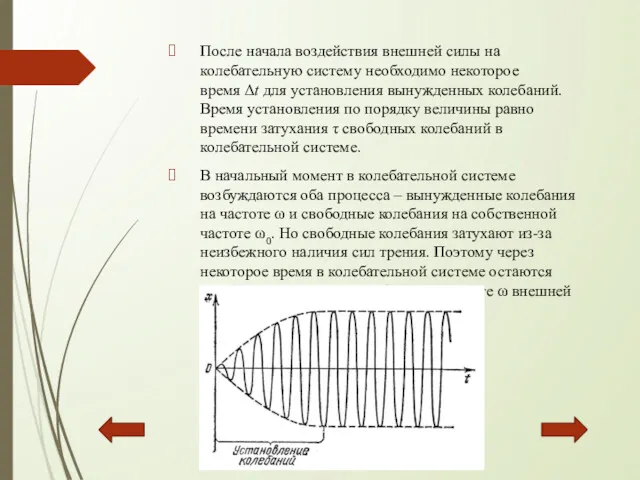
После начала воздействия внешней силы на колебательную систему необходимо некоторое время Δt для
После начала воздействия внешней силы на колебательную систему необходимо некоторое время Δt для
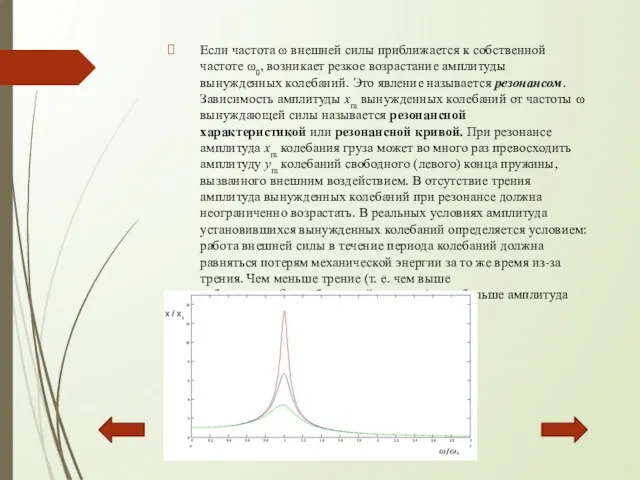
Если частота ω внешней силы приближается к собственной частоте ω0, возникает резкое возрастание амплитуды
Если частота ω внешней силы приближается к собственной частоте ω0, возникает резкое возрастание амплитуды
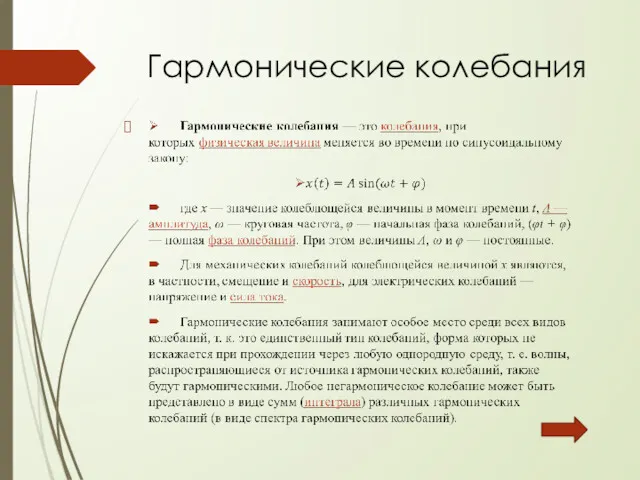
Гармонические колебания
Гармонические колебания
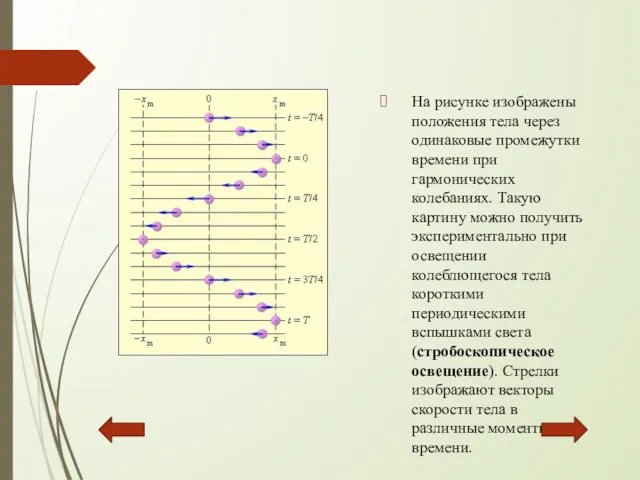
На рисунке изображены положения тела через одинаковые промежутки времени при гармонических
На рисунке изображены положения тела через одинаковые промежутки времени при гармонических
Резонанс
Резонанс — явление, при котором амплитуда вынужденных колебаний имеет максимум при некотором значении частоты вынуждающей силы. Часто это
Резонанс
Резонанс — явление, при котором амплитуда вынужденных колебаний имеет максимум при некотором значении частоты вынуждающей силы. Часто это
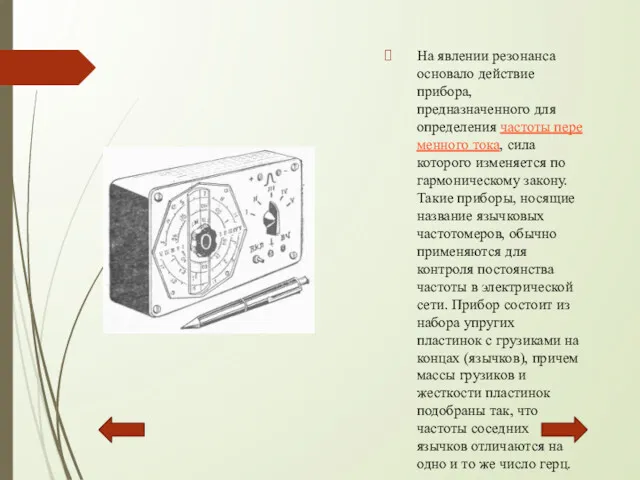
На явлении резонанса основало действие прибора, предназначенного для определения частоты переменного тока, сила
На явлении резонанса основало действие прибора, предназначенного для определения частоты переменного тока, сила
Автоколебания
Автоколебания — незатухающие колебания в диссипативной динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии
Автоколебания
Автоколебания — незатухающие колебания в диссипативной динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии
Как правило, чтобы автоколебательная система начала совершать постоянные автоколебания, её надо
Как правило, чтобы автоколебательная система начала совершать постоянные автоколебания, её надо
В автоколебательных системах также могут наблюдаться явления динамического хаоса.
Для связанных автоколебательных
В автоколебательных системах также могут наблюдаться явления динамического хаоса.
Для связанных автоколебательных
Автоколебания могут иметь различную природу: механическую, тепловую, электромагнитную, химическую. Механизм возникновения
Автоколебания могут иметь различную природу: механическую, тепловую, электромагнитную, химическую. Механизм возникновения
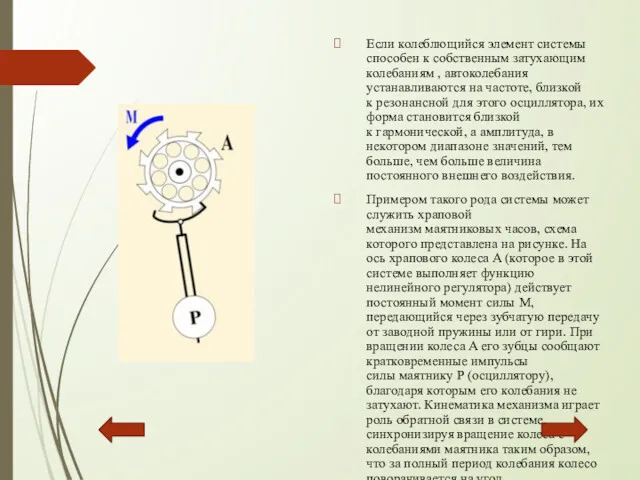
Если колеблющийся элемент системы способен к собственным затухающим колебаниям , автоколебания устанавливаются на частоте,
Если колеблющийся элемент системы способен к собственным затухающим колебаниям , автоколебания устанавливаются на частоте,
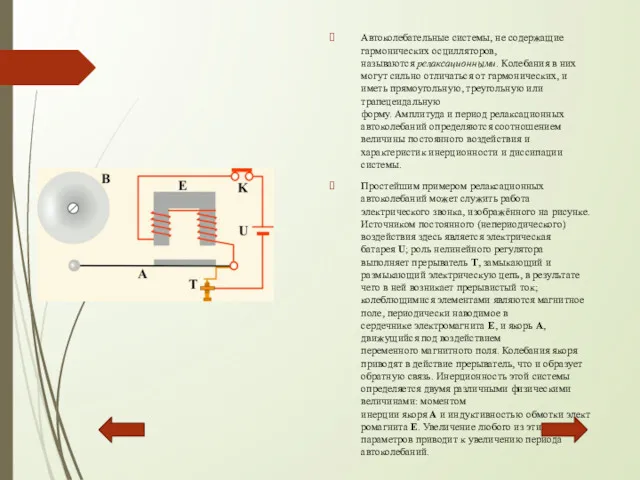
Автоколебательные системы, не содержащие гармонических осцилляторов, называются релаксационными. Колебания в них могут
Автоколебательные системы, не содержащие гармонических осцилляторов, называются релаксационными. Колебания в них могут
Молоток Маклакова
Молоток, совершающий удары за счёт энергии электрической цепи переменного тока
Молоток Маклакова
Молоток, совершающий удары за счёт энергии электрической цепи переменного тока
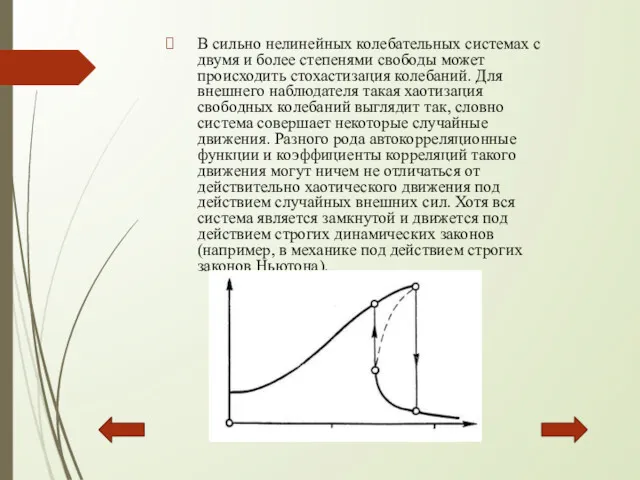
В сильно нелинейных колебательных системах с двумя и более степенями свободы
В сильно нелинейных колебательных системах с двумя и более степенями свободы
Параметрические колебания
Параметрические колебания — это колебания, возникающие в присутствии изменяющихся во
Параметрические колебания
Параметрические колебания — это колебания, возникающие в присутствии изменяющихся во
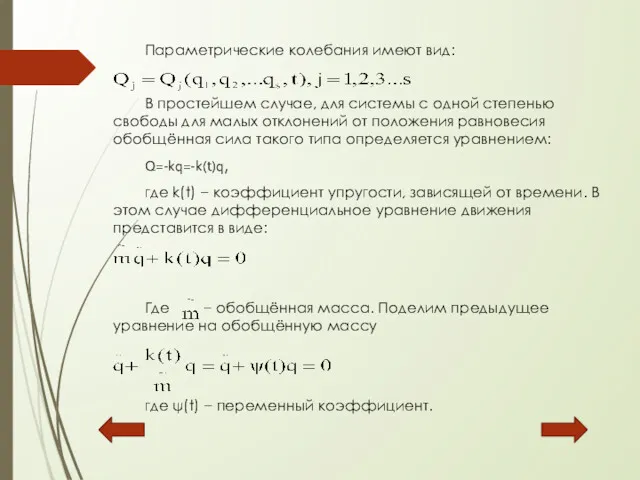
Параметрические колебания имеют вид:
В простейшем случае, для системы с одной степенью
Параметрические колебания имеют вид:
В простейшем случае, для системы с одной степенью
Параметрические колебания характеризуются тем, что энергия поступает в систему за
Параметрические колебания характеризуются тем, что энергия поступает в систему за
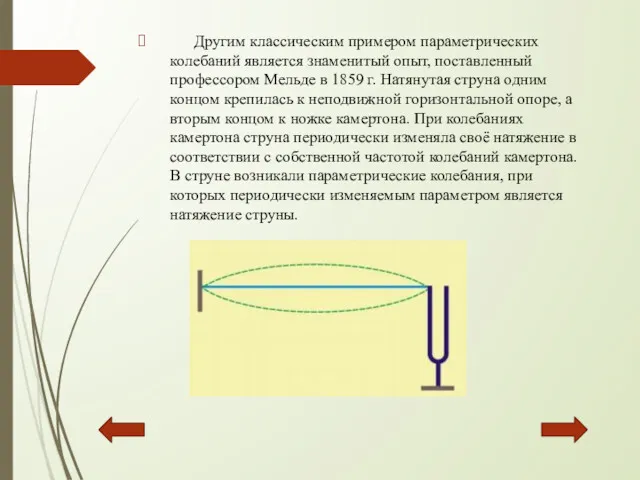
Другим классическим примером параметрических колебаний является знаменитый опыт, поставленный профессором
Другим классическим примером параметрических колебаний является знаменитый опыт, поставленный профессором
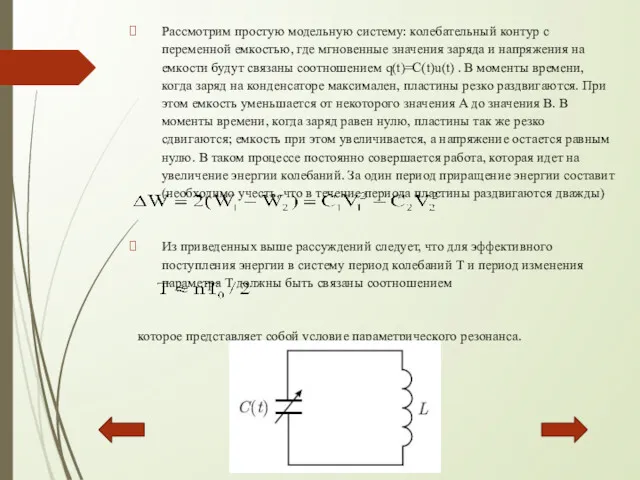
Рассмотрим простую модельную систему: колебательный контур с переменной емкостью, где мгновенные
Рассмотрим простую модельную систему: колебательный контур с переменной емкостью, где мгновенные
 Современные тепловые двигатели
Современные тепловые двигатели Constant Jerk Trajectory Generator
Constant Jerk Trajectory Generator Мастер класс по использованию сингапурской системы для учителей физики Татарстан
Мастер класс по использованию сингапурской системы для учителей физики Татарстан Механізм газорозподілу. (Лекція 3.2)
Механізм газорозподілу. (Лекція 3.2) Геометрическа оптика
Геометрическа оптика Легированные стали
Легированные стали Силы в природе (7 класс)
Силы в природе (7 класс) Дисперсия. Важнейшие выводы теории Максвелла
Дисперсия. Важнейшие выводы теории Максвелла Урок по физике Сила трения
Урок по физике Сила трения Практические навыки матроса. Основы МППСС. Лекция 3
Практические навыки матроса. Основы МППСС. Лекция 3 Výpočet tepla
Výpočet tepla Нестабильные обороты на холостом ходу при включённой нагрузке
Нестабильные обороты на холостом ходу при включённой нагрузке Воздухоплавание. Первый воздушный полёт
Воздухоплавание. Первый воздушный полёт Потенциальная и кинетическая энергия
Потенциальная и кинетическая энергия Агрегатные состояния веществ
Агрегатные состояния веществ Коммерческий транспорт Groupe PSA - Opel Vivaro
Коммерческий транспорт Groupe PSA - Opel Vivaro Хромов_В_И_ПМ-101_радиация
Хромов_В_И_ПМ-101_радиация Электр станцияларының электр жабдықтары: аккумуляторлық, конденсаторлық қондырғылар
Электр станцияларының электр жабдықтары: аккумуляторлық, конденсаторлық қондырғылар Тепловое действие тока. Закон Джоуля–Ленца
Тепловое действие тока. Закон Джоуля–Ленца Презентация к уроку Что изучает физика. Физические явления (7 класс)
Презентация к уроку Что изучает физика. Физические явления (7 класс) презентация импульс тела закон сохранения импульса
презентация импульс тела закон сохранения импульса Урок физики в 7 классе на тему: Агрегатные состояния вещества
Урок физики в 7 классе на тему: Агрегатные состояния вещества Состав ядра. Ядерные силы
Состав ядра. Ядерные силы Нагревание воздуха и его температура
Нагревание воздуха и его температура Режим промывки насоса
Режим промывки насоса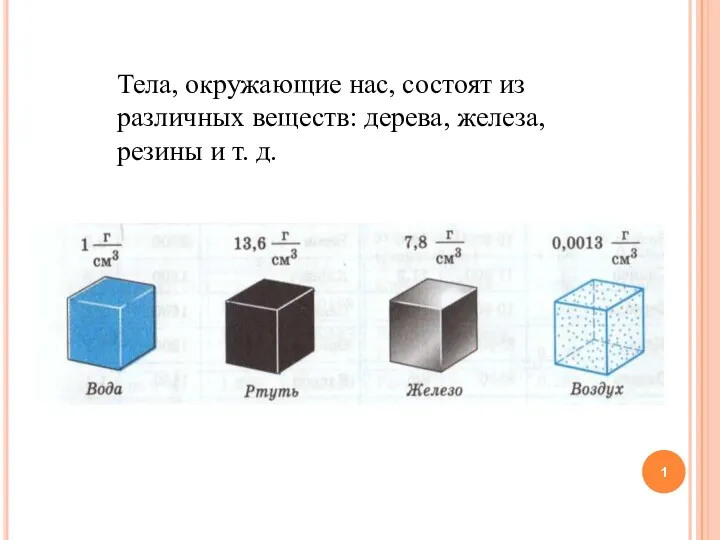 Понятие плотности тела (вещества)
Понятие плотности тела (вещества)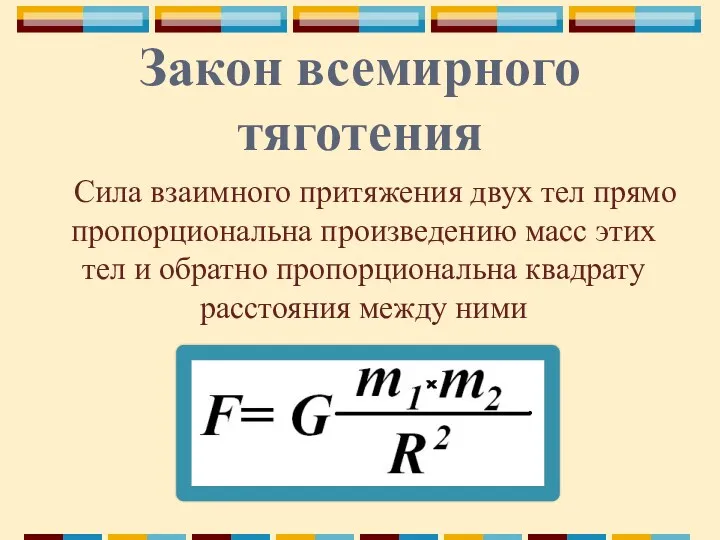 Презентация Вес тела
Презентация Вес тела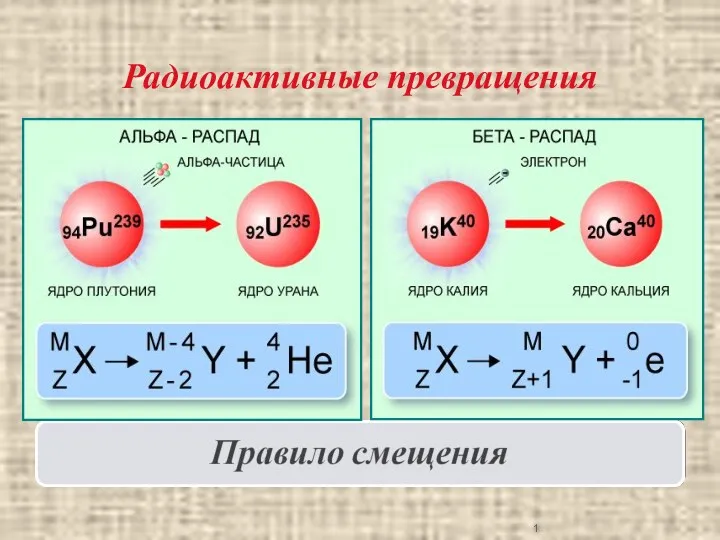 ИЗОТОПЫ
ИЗОТОПЫ