- Курс лекций по теоретической механике. Динамика (I часть)

Содержание
- 2. Содержание Лекция 1. Введение в динамику. Законы и аксиомы динамики материальной точки. Основное уравнение динамики. Дифференциальные
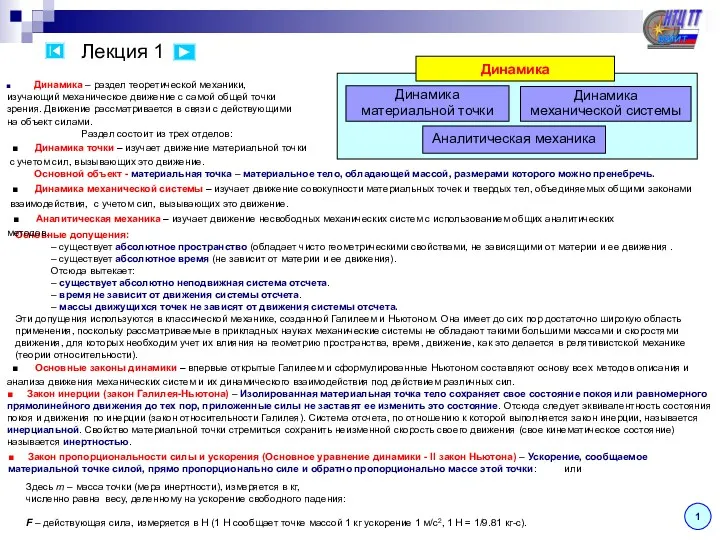
- 3. Лекция 1 Динамика – раздел теоретической механики, изучающий механическое движение с самой общей точки зрения. Движение
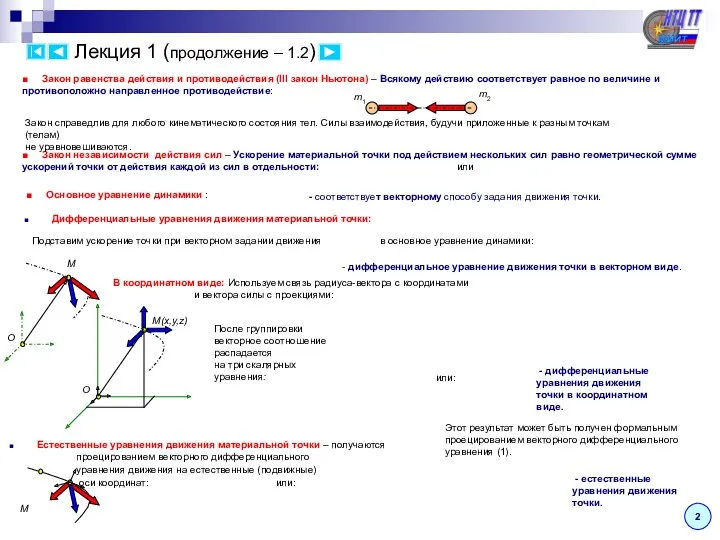
- 4. Лекция 1 (продолжение – 1.2) Дифференциальные уравнения движения материальной точки: - дифференциальное уравнение движения точки в
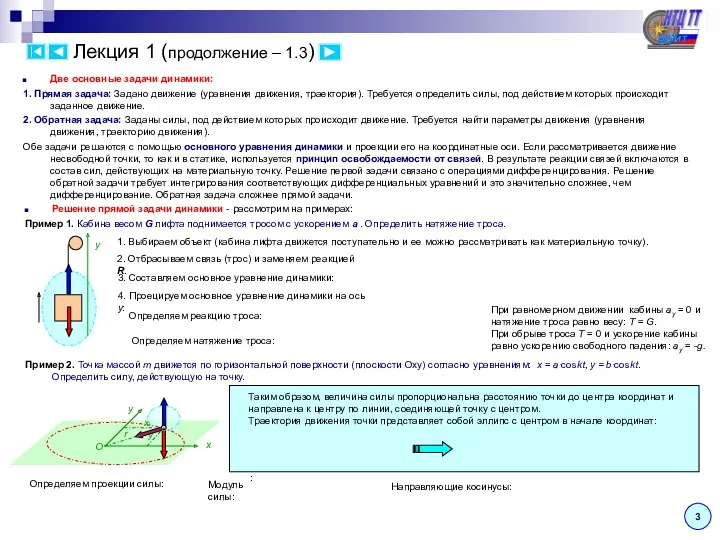
- 5. Две основные задачи динамики: 1. Прямая задача: Задано движение (уравнения движения, траектория). Требуется определить силы, под
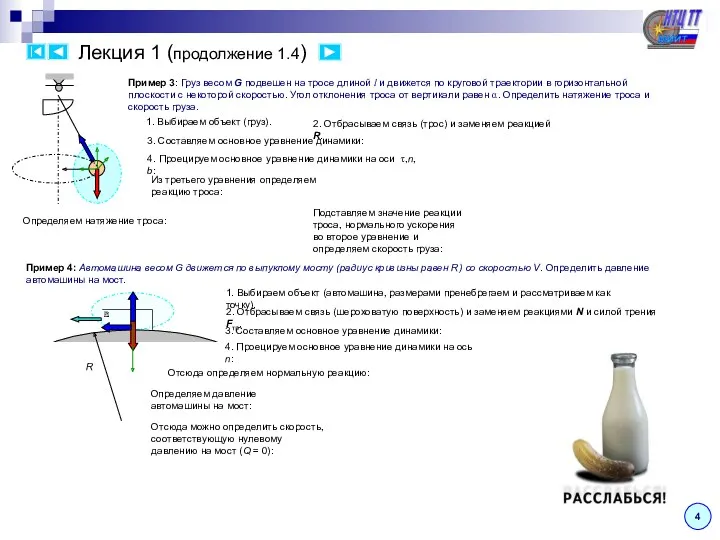
- 6. Лекция 1 (продолжение 1.4) Пример 3: Груз весом G подвешен на тросе длиной l и движется
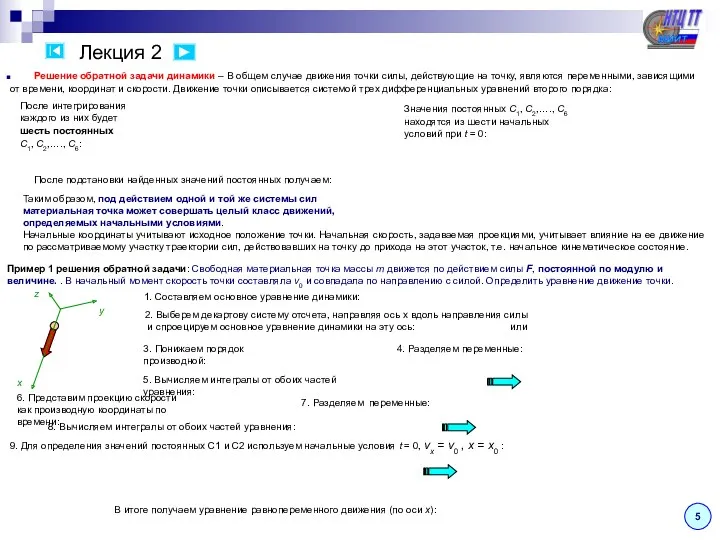
- 7. Лекция 2 После подстановки найденных значений постоянных получаем: Таким образом, под действием одной и той же
- 8. Общие указания к решению прямой и обратной задачи. Порядок решения: 1. Составление дифференциального уравнения движения: 1.1.
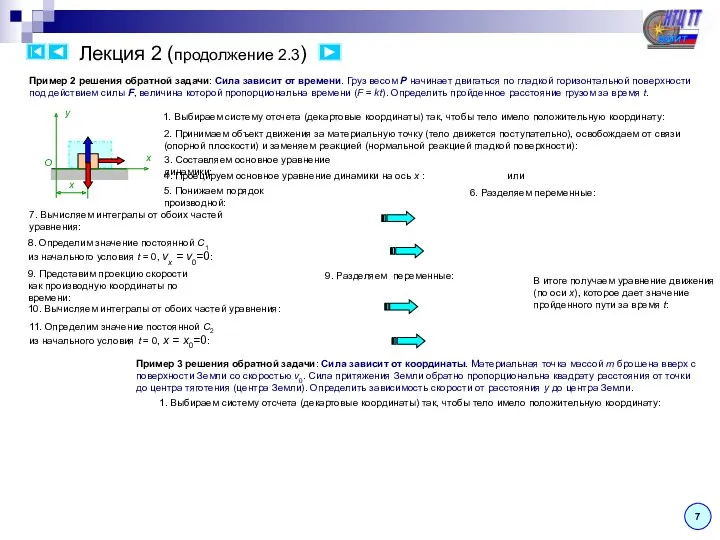
- 9. Лекция 2 (продолжение 2.3) Пример 2 решения обратной задачи: Сила зависит от времени. Груз весом P
- 10. Лекция 2 (продолжение 2.4) Пример 2 решения обратной задачи: Сила зависит от скорости. Судно массы m
- 11. Лекция 3 Динамика механической системы. Система материальных точек или механическая система – Совокупность материальных точек или
- 12. Лекция 3 (продолжение 3.2) 10 Теорема о движении центра масс системы – Рассмотрим систему n материальных
- 13. Лекция 4 Импульс силы – мера механического взаимодействия, характеризующая передачу механического движения со стороны действующих на
- 14. Лекция 4 (продолжение4.2) 12 Момент количества движения точки или кинетический момент движения относительно некоторого центра –
- 16. Скачать презентацию
Содержание
Лекция 1. Введение в динамику. Законы и аксиомы динамики материальной точки.
Содержание
Лекция 1. Введение в динамику. Законы и аксиомы динамики материальной точки.
Лекция 1
Динамика – раздел теоретической механики,
изучающий механическое движение с самой общей
Лекция 1
Динамика – раздел теоретической механики,
изучающий механическое движение с самой общей
Лекция 1 (продолжение – 1.2)
Дифференциальные уравнения движения материальной точки:
- дифференциальное уравнение
Лекция 1 (продолжение – 1.2)
Дифференциальные уравнения движения материальной точки:
- дифференциальное уравнение
Две основные задачи динамики:
1. Прямая задача: Задано движение (уравнения движения, траектория).
Две основные задачи динамики:
1. Прямая задача: Задано движение (уравнения движения, траектория).
Лекция 1 (продолжение 1.4)
Пример 3: Груз весом G подвешен на тросе
Лекция 1 (продолжение 1.4)
Пример 3: Груз весом G подвешен на тросе
Лекция 2
После подстановки найденных значений постоянных получаем:
Таким образом, под действием одной
Лекция 2
После подстановки найденных значений постоянных получаем:
Таким образом, под действием одной
Общие указания к решению прямой и обратной задачи. Порядок решения:
1. Составление
Общие указания к решению прямой и обратной задачи. Порядок решения:
1. Составление
Лекция 2 (продолжение 2.3)
Пример 2 решения обратной задачи: Сила зависит от
Лекция 2 (продолжение 2.3)
Пример 2 решения обратной задачи: Сила зависит от
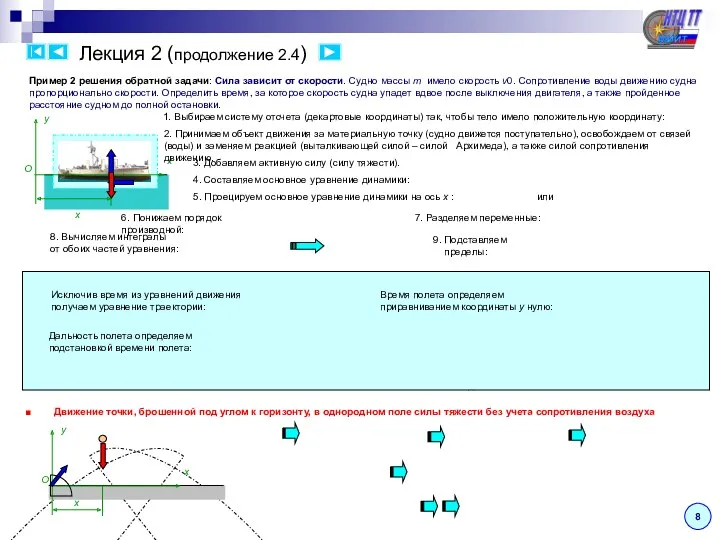
Лекция 2 (продолжение 2.4)
Пример 2 решения обратной задачи: Сила зависит от
Лекция 2 (продолжение 2.4)
Пример 2 решения обратной задачи: Сила зависит от
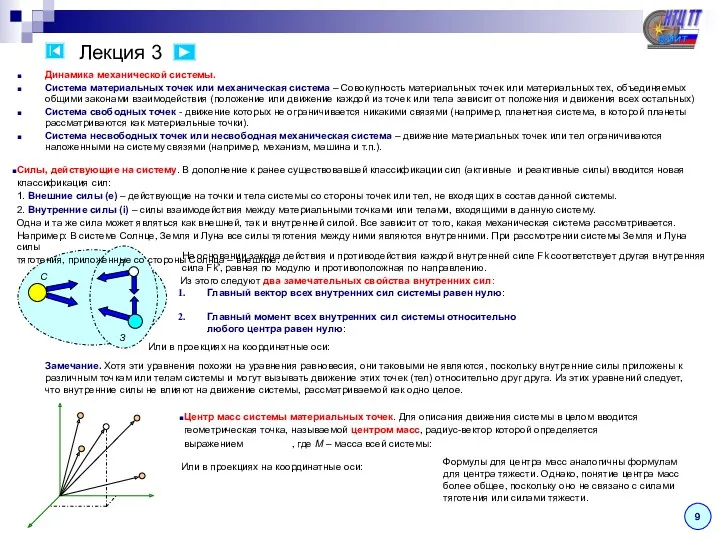
Лекция 3
Динамика механической системы.
Система материальных точек или механическая система – Совокупность
Лекция 3
Динамика механической системы.
Система материальных точек или механическая система – Совокупность

Лекция 3 (продолжение 3.2)
10
Теорема о движении центра масс системы – Рассмотрим
Лекция 3 (продолжение 3.2)
10
Теорема о движении центра масс системы – Рассмотрим
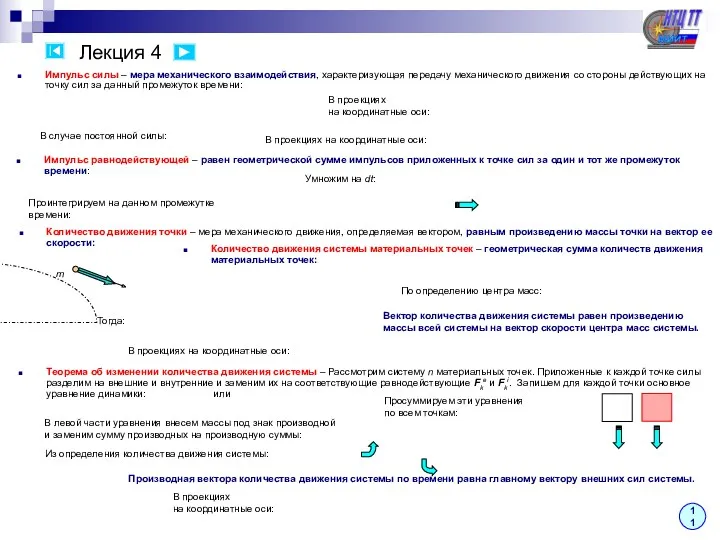
Лекция 4
Импульс силы – мера механического взаимодействия, характеризующая передачу механического движения
Лекция 4
Импульс силы – мера механического взаимодействия, характеризующая передачу механического движения
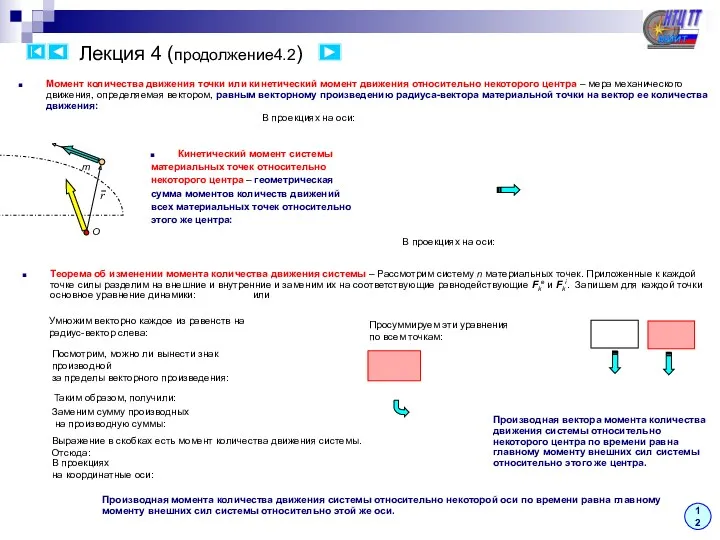
Лекция 4 (продолжение4.2)
12
Момент количества движения точки или кинетический момент движения относительно
Лекция 4 (продолжение4.2)
12
Момент количества движения точки или кинетический момент движения относительно
 Семинарское занятие по теме основы электростатики, 10 класс
Семинарское занятие по теме основы электростатики, 10 класс Баяндама Альберт Эйнштейн
Баяндама Альберт Эйнштейн Основные уравнения электростатики в вакууме. (Лекция 2)
Основные уравнения электростатики в вакууме. (Лекция 2) Квантовые свойства электромагнитного излучения. Фотоэффект
Квантовые свойства электромагнитного излучения. Фотоэффект Изучение треков заряженных частиц по готовым фотографиям
Изучение треков заряженных частиц по готовым фотографиям Моторамы. Назначение моторам
Моторамы. Назначение моторам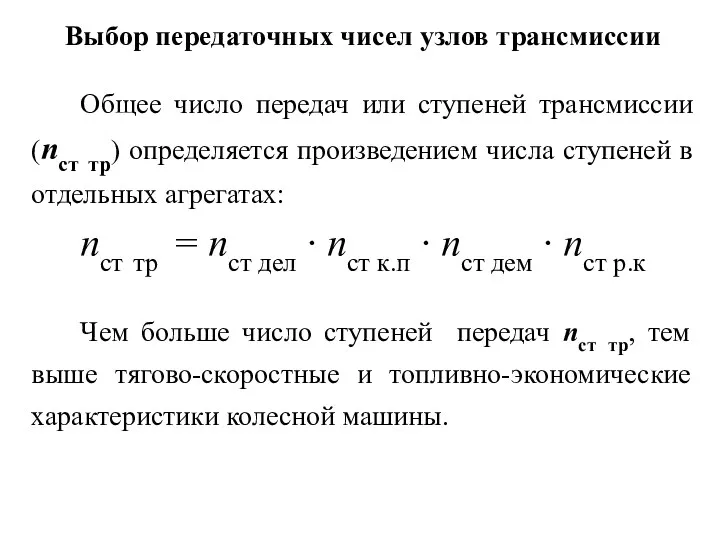 Выбор передаточных чисел узлов трансмиссии. Общее число передач или ступеней трансмиссии. Лекция 14
Выбор передаточных чисел узлов трансмиссии. Общее число передач или ступеней трансмиссии. Лекция 14 Измерение атмосферного давления. 7 класс
Измерение атмосферного давления. 7 класс Элементы квантовой теории (продолжение). Лекция 10
Элементы квантовой теории (продолжение). Лекция 10 Курс лекций по сопротивлению материалов (модуль 2, лекции 9-17)
Курс лекций по сопротивлению материалов (модуль 2, лекции 9-17) Физика в картинках
Физика в картинках Предметная неделя
Предметная неделя Активізація пізнавальної діяльності учнів на уроках фізики шляхом використання проблемних ситуацій
Активізація пізнавальної діяльності учнів на уроках фізики шляхом використання проблемних ситуацій Урок физики в 9 классе Магнитное поле. Линии магнитного поля
Урок физики в 9 классе Магнитное поле. Линии магнитного поля Общее устройство автомобиля
Общее устройство автомобиля Тепловое загрязнение
Тепловое загрязнение Расчет сложных электрических цепей постоянного тока
Расчет сложных электрических цепей постоянного тока Зонная теория твердых тел
Зонная теория твердых тел Метод вузлових напруг
Метод вузлових напруг Жидкостные термометры
Жидкостные термометры Активизация познавательной деятельности учащихся при изучении физики
Активизация познавательной деятельности учащихся при изучении физики Давление. От чего зависит результат действия силы?
Давление. От чего зависит результат действия силы? Использование технологии развития критического мышления на уроках математики и физики
Использование технологии развития критического мышления на уроках математики и физики Стационарная теплопроводность. (Лекции 6-7)
Стационарная теплопроводность. (Лекции 6-7) Экспериментальные методы исследования частиц
Экспериментальные методы исследования частиц Путь к звездам
Путь к звездам Колебательный контур
Колебательный контур Как можно обрабатывать заготовки из древесины, имеющие цилиндрическую форму. Устройство токарного станка по дереву
Как можно обрабатывать заготовки из древесины, имеющие цилиндрическую форму. Устройство токарного станка по дереву