- Основные определения динамики. Лекция 1

Содержание
- 2. Аксиомы динамики 1. Аксиома 1 1-й закон Ньютона Такое кинематическое состояние точки называется инерциальным. Система отсчета,
- 3. Аксиомы динамики 2. Аксиома 2 2-й закон Ньютона Ускорение, сообщаемое материальной точке относительно инерциальной системы отсчета,
- 4. Аксиомы динамики 3. Аксиома 3 3-й закон Ньютона Две материальные точки взаимодействуют с силами, одинаковыми по
- 5. Аксиомы динамики 4. Аксиома 4 Принцип суперпозиции Материальная точка, под действием нескольких сил приобретает ускорение, равное
- 6. Дифференциальные уравнения движения точки 1. Дифференциальные уравнения движения точки в декартовой форме O x y z
- 7. Дифференциальные уравнения движения точки 2. Дифференциальные уравнения движения точки в естественной форме b τ n M
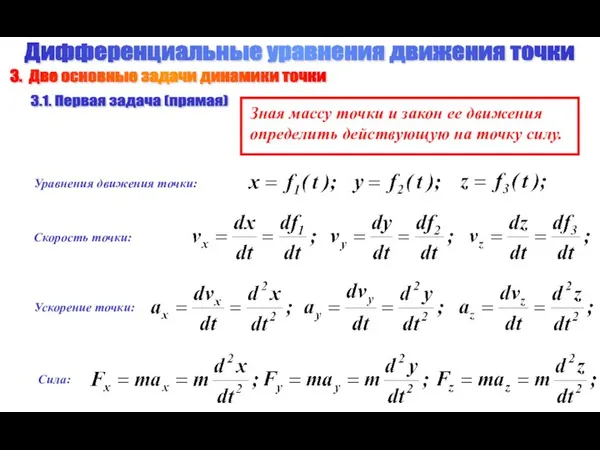
- 8. Дифференциальные уравнения движения точки 3. Две основные задачи динамики точки Зная массу точки и закон ее
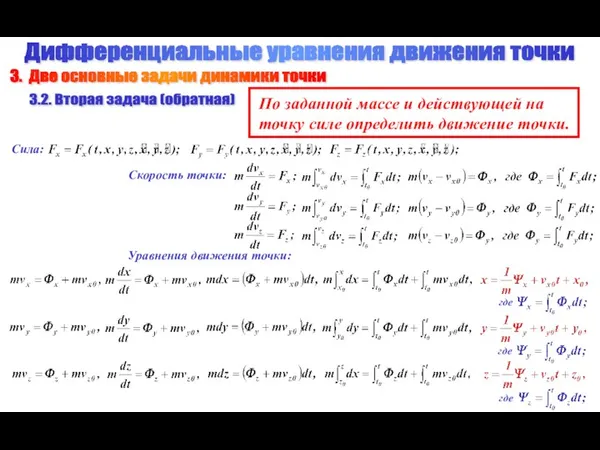
- 9. Дифференциальные уравнения движения точки 3. Две основные задачи динамики точки По заданной массе и действующей на
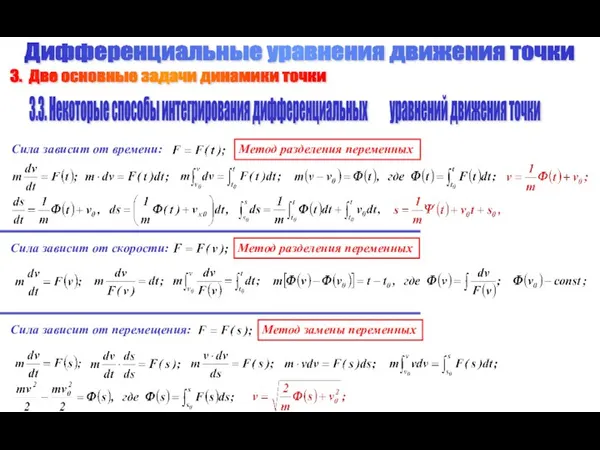
- 10. Дифференциальные уравнения движения точки 3. Две основные задачи динамики точки Сила зависит от времени: Метод разделения
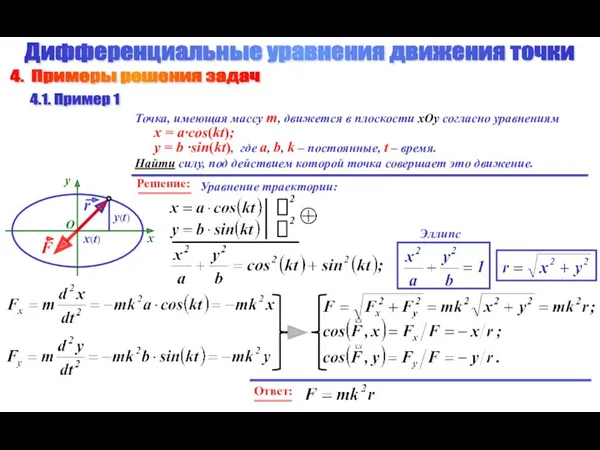
- 11. y(t) Найти силу, под действием которой точка совершает это движение. Дифференциальные уравнения движения точки 4. Примеры
- 12. Точка, имеющая массу m, брошена с поверхности земли со скоростью v0 под углом α к горизонту
- 13. Точка, имеющая массу m, брошена с поверхности земли со скоростью v0 под углом α к горизонту
- 14. Точка, имеющая массу m, брошена с поверхности земли со скоростью v0 под углом α к горизонту
- 16. Скачать презентацию
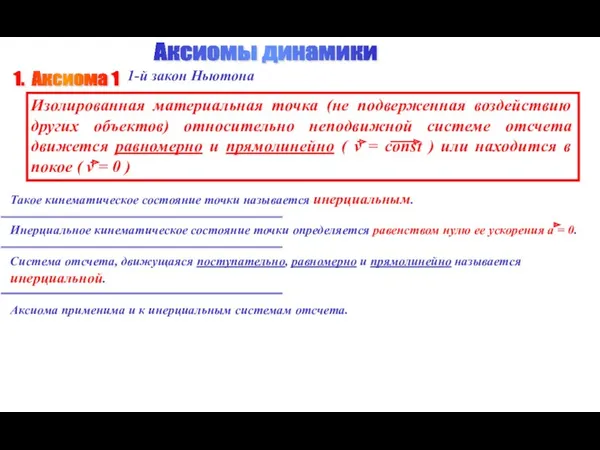
Аксиомы динамики
1. Аксиома 1
1-й закон Ньютона
Такое кинематическое состояние точки
Аксиомы динамики
1. Аксиома 1
1-й закон Ньютона
Такое кинематическое состояние точки

Аксиомы динамики
2. Аксиома 2
2-й закон Ньютона
Ускорение, сообщаемое материальной точке
Аксиомы динамики
2. Аксиома 2
2-й закон Ньютона
Ускорение, сообщаемое материальной точке
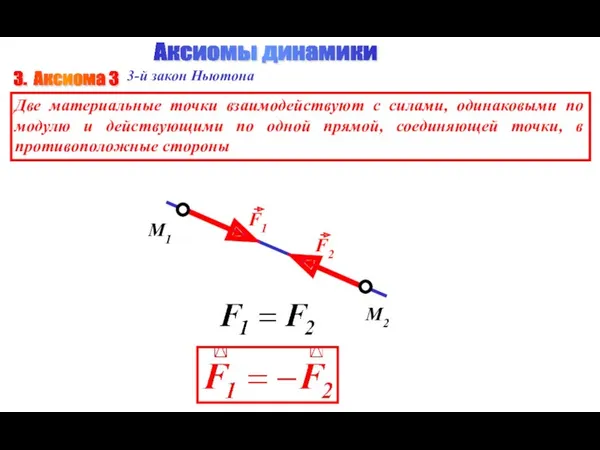
Аксиомы динамики
3. Аксиома 3
3-й закон Ньютона
Две материальные точки взаимодействуют
Аксиомы динамики
3. Аксиома 3
3-й закон Ньютона
Две материальные точки взаимодействуют

Аксиомы динамики
4. Аксиома 4
Принцип суперпозиции
Материальная точка, под действием нескольких
Аксиомы динамики
4. Аксиома 4
Принцип суперпозиции
Материальная точка, под действием нескольких
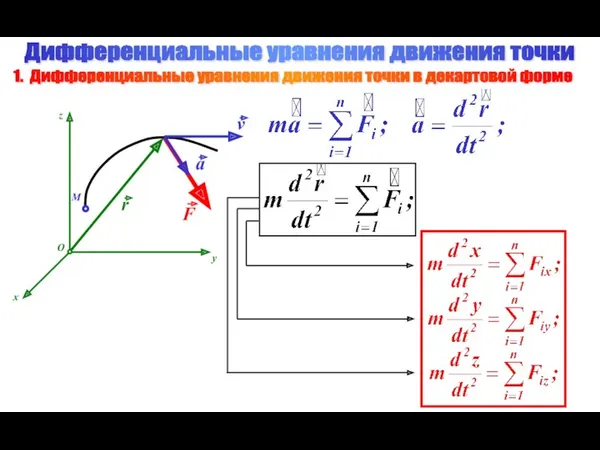
Дифференциальные уравнения движения точки
1. Дифференциальные уравнения движения точки в декартовой
Дифференциальные уравнения движения точки
1. Дифференциальные уравнения движения точки в декартовой
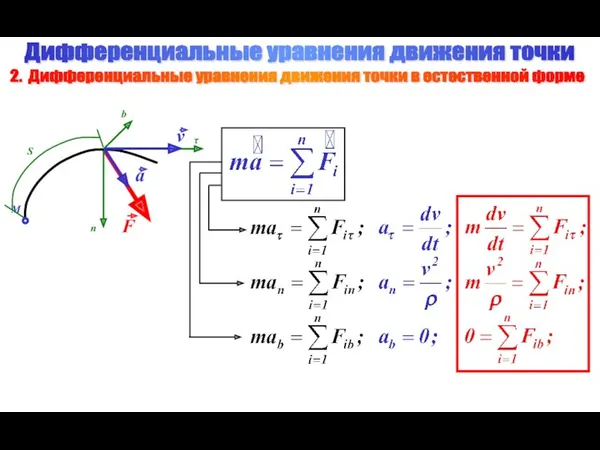
Дифференциальные уравнения движения точки
2. Дифференциальные уравнения движения точки в естественной
Дифференциальные уравнения движения точки
2. Дифференциальные уравнения движения точки в естественной
Дифференциальные уравнения движения точки
3. Две основные задачи динамики точки
Зная
Дифференциальные уравнения движения точки
3. Две основные задачи динамики точки
Зная
Дифференциальные уравнения движения точки
3. Две основные задачи динамики точки
По
Дифференциальные уравнения движения точки
3. Две основные задачи динамики точки
По
Дифференциальные уравнения движения точки
3. Две основные задачи динамики точки
Сила
Дифференциальные уравнения движения точки
3. Две основные задачи динамики точки
Сила
y(t)
Найти силу, под действием которой точка совершает это движение.
Дифференциальные уравнения движения
y(t)
Найти силу, под действием которой точка совершает это движение.
Дифференциальные уравнения движения
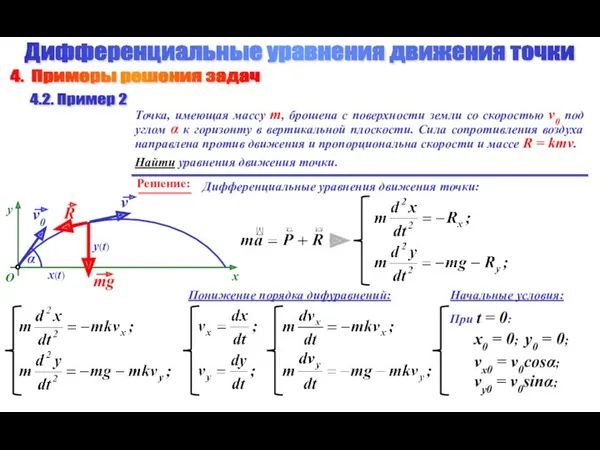
Точка, имеющая массу m, брошена с поверхности земли со скоростью v0
Точка, имеющая массу m, брошена с поверхности земли со скоростью v0
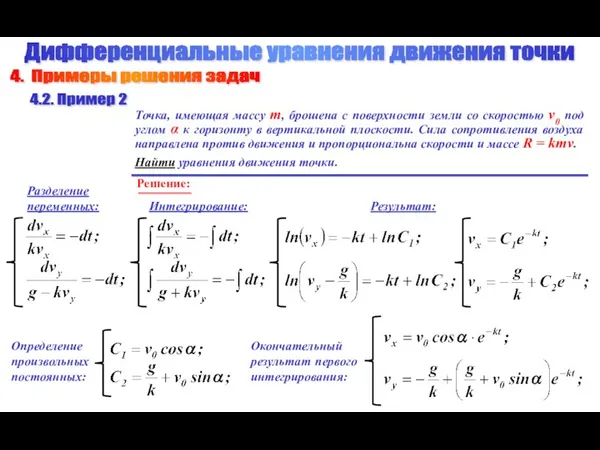
Точка, имеющая массу m, брошена с поверхности земли со скоростью v0
Точка, имеющая массу m, брошена с поверхности земли со скоростью v0
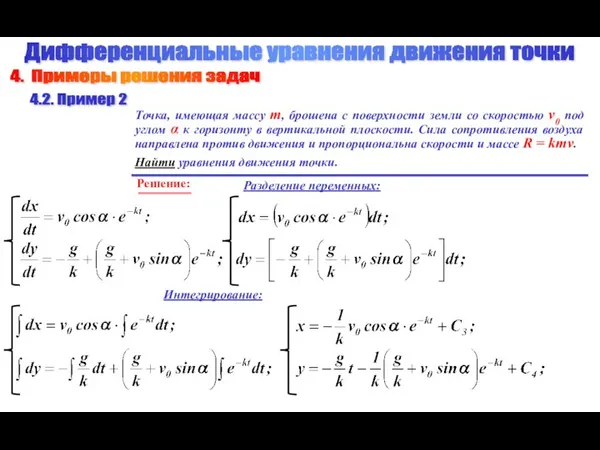
Точка, имеющая массу m, брошена с поверхности земли со скоростью v0
Точка, имеющая массу m, брошена с поверхности земли со скоростью v0
 Қазіргі заманғы жаратылыстану концепциялары пәні (физика негіздері)
Қазіргі заманғы жаратылыстану концепциялары пәні (физика негіздері) Виды подготовок авиационной техники к полетам: назначение, содержание, организация и контроль их проведения
Виды подготовок авиационной техники к полетам: назначение, содержание, организация и контроль их проведения Механические колебания и волны. Акустика
Механические колебания и волны. Акустика Электроразведка. Методы профилирования
Электроразведка. Методы профилирования Радіація та її джерела. Вплив на організм людини
Радіація та її джерела. Вплив на організм людини Механические колебания и волны. Звук. Подготовка к ГИА
Механические колебания и волны. Звук. Подготовка к ГИА Излучение атомарного водорода
Излучение атомарного водорода Оптика. Описание оптических систем. (Лекция 5)
Оптика. Описание оптических систем. (Лекция 5) Лабораторные работы по физике для 8 класса к учебнику А.В.Перышкина Физика 8
Лабораторные работы по физике для 8 класса к учебнику А.В.Перышкина Физика 8 Електричний струм у газах
Електричний струм у газах Презентация к уроку физики Электромагниты
Презентация к уроку физики Электромагниты КПД простых механизмов. 7 класс
КПД простых механизмов. 7 класс Биологическое действие ионизирующих излучений
Биологическое действие ионизирующих излучений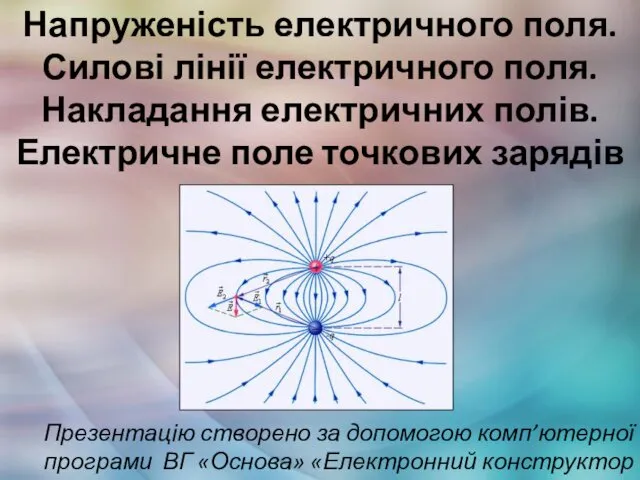 Напруженість електричного поля. Силові лінії електричного поля. Накладання електричних полів. Електричне поле точкових зарядів
Напруженість електричного поля. Силові лінії електричного поля. Накладання електричних полів. Електричне поле точкових зарядів Презентация к уроку физики Электрический ток. Источники тока
Презентация к уроку физики Электрический ток. Источники тока Причины изменения технического состояния автомобиля (для обучающихся СПО по специальности Техник
Причины изменения технического состояния автомобиля (для обучающихся СПО по специальности Техник Физика и научный метод познания
Физика и научный метод познания Магнит өрісі
Магнит өрісі Фізичні та хімічні властивості води
Фізичні та хімічні властивості води Применение простых механизмов
Применение простых механизмов Сверлильный станок
Сверлильный станок Динамика. Ньютон заңдары
Динамика. Ньютон заңдары Презентация к уроку по теме СВОБОДНОЕ ПАДЕНИЕ ТЕЛ
Презентация к уроку по теме СВОБОДНОЕ ПАДЕНИЕ ТЕЛ Физическая спартакиада. Игра-соревнование
Физическая спартакиада. Игра-соревнование Электрические переходы
Электрические переходы Электромагнитная индукция. Лекция 12
Электромагнитная индукция. Лекция 12 Брейн-ринг - по физике. 11 класс
Брейн-ринг - по физике. 11 класс Гелиоцентрическая система мира
Гелиоцентрическая система мира