- Произвольная плоская система сил

Содержание
- 2. Любая плоская система сил, действующих на абсолютно твердое тело, при приведении к произвольно выбранному центру О
- 3. Примечание. Главный момент для плоской системы сил заменен на алгебраическую сумму моментов всех сил относительно центра
- 4. Вывод Формулы (1) выражают следующие аналитические условия равновесия: для равновесия произвольной плоской системы сил необходимо и
- 5. Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно
- 6. Другая форма условий равновесия для параллельных сил, получающаяся из равенств (2) или (3), имеет вид 5.3.
- 7. Вывод. Реакцию Неизвестную по направлению реакцию неподвижной шарнирной Реакция такой опоры проходит через ось шарнира и
- 8. Ранее был сделан вывод о том, что действие жесткой заделки заменяется наперед неизвестной реакцией и парой
- 9. Пример 1. 3. Освободимся от связей. 1. Выберем объект равновесия. Брус АВ. 2. Приложим к объекту
- 10. Реакции связей будут направлены перпендикулярно соответствующим плоскостям. Реакция связи направлена по общей нормали в точке соприкосновения
- 11. Найдем плечо силы относительно точки А: h = АК. 5. Выберем моментную точку. Удобно взять точку
- 12. Из последнего уравнения находим х: N2 - R sin (α) = 0, у: N1 – P
- 13. Силы 2. Приложим к объекту равновесия заданные силы. и пара сил с моментом mD . Симметричная
- 14. 4. Выберем систему координат. В точке А подвижный шарнир, который заменяется одной реакцией , перпендикулярной плоскости,
- 15. При вычислении момента силы была использована теорема Вариньона о моменте равнодействующей: Предварительно разложим силу Модули составляющих:
- 16. Из первого уравнения получим 7. Составим уравнения равновесия. ∑ Fkx = ХВ + Q cos α
- 18. Скачать презентацию

Любая плоская система сил, действующих на абсолютно твердое тело, при приведении
Любая плоская система сил, действующих на абсолютно твердое тело, при приведении

Примечание. Главный момент
для плоской системы сил заменен на алгебраическую сумму
Примечание. Главный момент
для плоской системы сил заменен на алгебраическую сумму

Вывод Формулы (1) выражают следующие аналитические условия равновесия: для равновесия произвольной
Вывод Формулы (1) выражают следующие аналитические условия равновесия: для равновесия произвольной

Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы

Другая форма условий равновесия для параллельных сил, получающаяся из равенств (2)
Другая форма условий равновесия для параллельных сил, получающаяся из равенств (2)

Вывод. Реакцию
Неизвестную по направлению реакцию
неподвижной шарнирной
Реакция такой опоры проходит через ось
Вывод. Реакцию
Неизвестную по направлению реакцию
неподвижной шарнирной
Реакция такой опоры проходит через ось

Ранее был сделан вывод о том, что действие жесткой заделки заменяется
Ранее был сделан вывод о том, что действие жесткой заделки заменяется

Пример 1.
3. Освободимся от связей.
1. Выберем объект равновесия. Брус АВ.
2. Приложим
Пример 1.
3. Освободимся от связей.
1. Выберем объект равновесия. Брус АВ.
2. Приложим

Реакции связей
будут направлены перпендикулярно соответствующим плоскостям.
Реакция связи
направлена по общей
Реакции связей
будут направлены перпендикулярно соответствующим плоскостям.
Реакция связи
направлена по общей

Найдем плечо силы
относительно точки А: h = АК.
5.
Найдем плечо силы
относительно точки А: h = АК.
5.

Из последнего уравнения находим
х: N2 - R sin (α) = 0,
у:
Из последнего уравнения находим
х: N2 - R sin (α) = 0,
у:

Силы
2. Приложим к объекту равновесия заданные силы.
и пара
Силы
2. Приложим к объекту равновесия заданные силы.
и пара

4. Выберем систему координат.
В точке А подвижный шарнир, который заменяется одной
4. Выберем систему координат.
В точке А подвижный шарнир, который заменяется одной

При вычислении момента силы
была использована теорема Вариньона о моменте равнодействующей:
При вычислении момента силы
была использована теорема Вариньона о моменте равнодействующей:

Из первого уравнения получим
7. Составим уравнения равновесия.
∑ Fkx = ХВ +
Из первого уравнения получим
7. Составим уравнения равновесия.
∑ Fkx = ХВ +
 Расчет нелинейных цепей графическим методом
Расчет нелинейных цепей графическим методом Рентгенофазовый анализ
Рентгенофазовый анализ Определение объема тел правильной и неправильной формы
Определение объема тел правильной и неправильной формы Атомы и ионы
Атомы и ионы Проектирование и организация труда зоны ЕО для автомобиля ГАЗ-2705 Газель
Проектирование и организация труда зоны ЕО для автомобиля ГАЗ-2705 Газель Кінетичні явища у напівпровідниках
Кінетичні явища у напівпровідниках Презентация по теме Механические колебания
Презентация по теме Механические колебания Линзы. Оптическая сила линзы
Линзы. Оптическая сила линзы Колебательный контур, частотные фильтры
Колебательный контур, частотные фильтры Методи передачі АМ сигналів і методи усунення невикористаної смуги частот. (Заняття 2)
Методи передачі АМ сигналів і методи усунення невикористаної смуги частот. (Заняття 2) Сила упругости
Сила упругости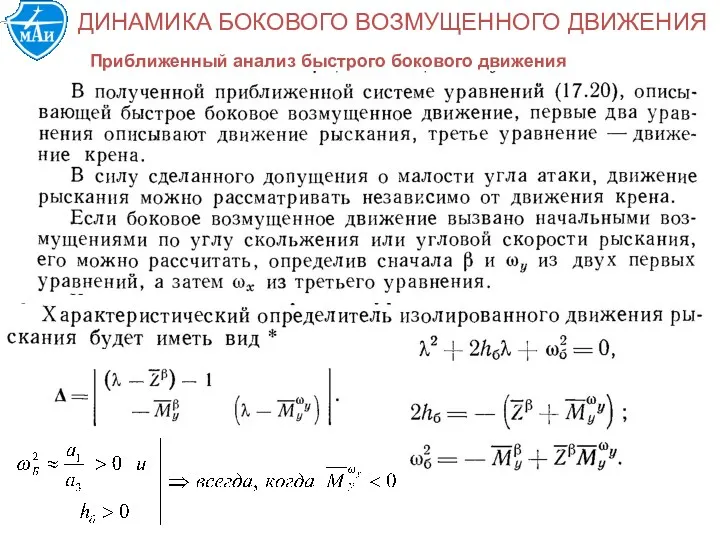 Динамика бокового возмущенного движения
Динамика бокового возмущенного движения Електродинаміка
Електродинаміка Закон Джоуля - Ленца
Закон Джоуля - Ленца Виды генераторов
Виды генераторов Дослідження режимів роботи рентгенівських апаратів
Дослідження режимів роботи рентгенівських апаратів Интегрированный урок физики и французского языка Прогулки по Парижу (обощение мателиала по темам: плотность, масса, сила тяжести, вес, давление, Эйфелева башня - символ Парижа)
Интегрированный урок физики и французского языка Прогулки по Парижу (обощение мателиала по темам: плотность, масса, сила тяжести, вес, давление, Эйфелева башня - символ Парижа) Зеркальные антенны
Зеркальные антенны Атмосферное давление
Атмосферное давление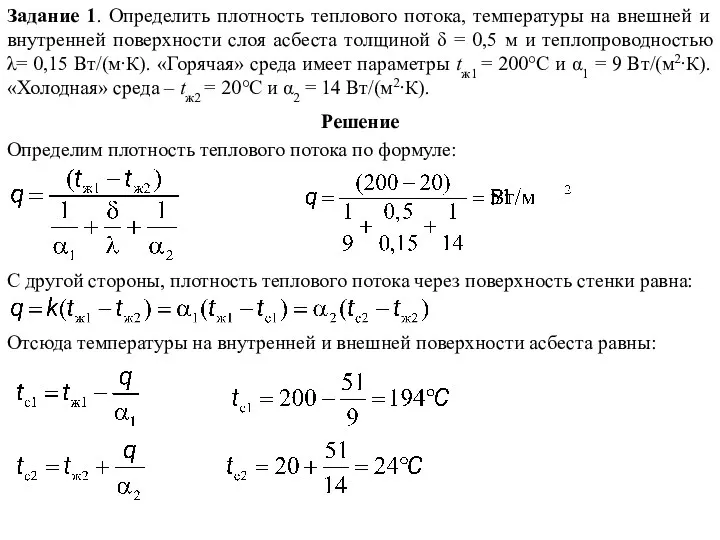 Теплопередача. Задачи
Теплопередача. Задачи Презентация. Колебательное движение (повторение).
Презентация. Колебательное движение (повторение). лабораторная работа №1 10 класс
лабораторная работа №1 10 класс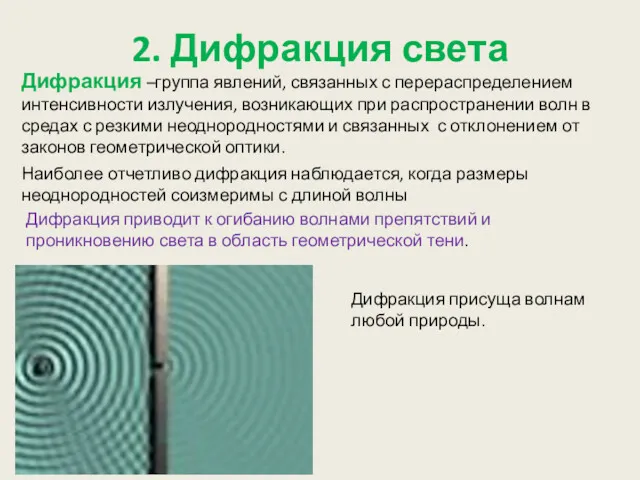 Дифракция света
Дифракция света Лабораторная работа Наблюдение сплошного и линейчатых спектров. 11 класс
Лабораторная работа Наблюдение сплошного и линейчатых спектров. 11 класс виды излучений. физика 11 класс
виды излучений. физика 11 класс игра инерция
игра инерция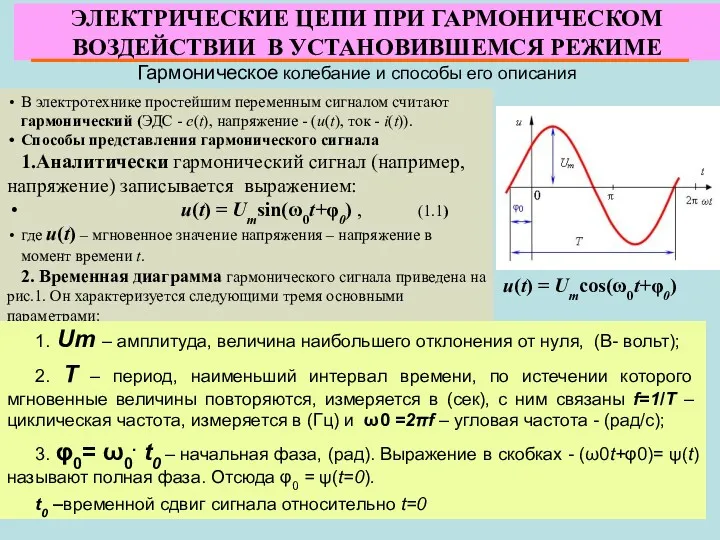 Электрические цепи при гармоническом воздействии в установившемся режиме
Электрические цепи при гармоническом воздействии в установившемся режиме Попов Александр Степанович
Попов Александр Степанович