- Раздел физики механика

Содержание
- 2. Литература: 1. Трофимова Т.И. Курс физики: учеб. пособие для инженерно-технич. специальностей вузов - М.: Академия, 2010.
- 3. Механика Механика — часть физики, которая изучает закономерности механического движения и причины, вызывающие или изменяющие это
- 4. Всякое движение твердого тела может быть представлено как сумма поступательного и вращательного движений. Поступательное движение –
- 5. Модели в механике (определения): Материальная точка — тело, обладающее массой, размерами которого можно пренебречь. Абсолютно твердое
- 6. Основные определения в кинематике Система отсчета — совокупность системы координат и часов, связанных с телом отсчета.
- 7. При движении материальной точки ее координаты определяется скалярными уравнениями: x = x(t), у = y(t), z
- 8. Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени, называется длиной пути Δs
- 9. Вектором средней скорости называется отношение приращения Δr радиуса-вектора точки к промежутку времени Δt: Направление вектора средней
- 10. Ускорение Ускорение – это физическая величина, характеризующая быстроту изменения скорости по модулю и направлению. Средним ускорением
- 11. Тангенциальная составляющая ускорения: Нормальная составляющая ускорения: Полное ускорение тела есть векторная сумма тангенциальной и нормальной составляющих:
- 12. В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом: — прямолинейное равномерное
- 13. Кинематика вращательного движения Модуль вектора угла поворота равен углу поворота, а его направление подчиняется правилу правого
- 14. Вектор угловой скорости направлен вдоль оси вращения по правилу правого винта. Линейная скорость точки: В векторном
- 15. При равномерном вращательном движении период равен: Число оборотов в единицу времени (частота ): Угловая частота вращения:
- 16. Угловое ускорение – это векторная величина, равная производной угловой скорости по времени: Направление вектора ускорения при
- 17. Тангенциальная составляющая ускорения: Нормальная составляющая ускорения:
- 18. В случае равнопеременного движения точки по окружности (ε=const): Связь между линейными и угловыми величинами выражается следующими
- 19. Динамика материальной точки «Всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех
- 20. Масса тела — физическая величина, являющаяся одной из основных характеристик материи, определяющая ее инерционные и гравитационные
- 21. Импульсом материальной точки (количеством движения) называется векторная величина численно равная произведению массы материальной точки на ее
- 22. Третий закон Ньютона: «Силы, с которыми действуют друг на друга материальные точки, всегда равны по модулю,
- 23. Динамика вращательного движения твердого тела относительно точки Рассмотрим твердое тело, как некую систему (рис.), состоящую из
- 24. Запишем основное уравнение динамики для точки:
- 25. Умножим обе части векторно на Знак производной можно вынести за знак векторного произведения (и знак суммы
- 26. Векторное произведение точки на её импульс называется моментом импульса этой точки относительно точки О. Эти три
- 27. Векторное произведение проведенного в точку приложения сил, на эту силу называется моментом силы Обозначим li –
- 28. C учетом новых обозначений: Запишем систему n уравнений для всех точек системы и сложим, левые и
- 29. Здесь сумма производных равна производной суммы: где – момент импульса системы, – результирующий момент всех внешних
- 30. Основной закон динамики вращательного движения твердого тела, вращающегося вокруг точки. Момент импульса системы является основной динамической
- 31. Динамика вращательного движения твердого тела относительно оси
- 32. Пусть некоторое тело вращается вокруг оси z . Получим уравнение динамики для некоторой точки mi этого
- 33. Так как у всех точек разная, введем вектор угловой скорости причем Тогда Так как тело абсолютно
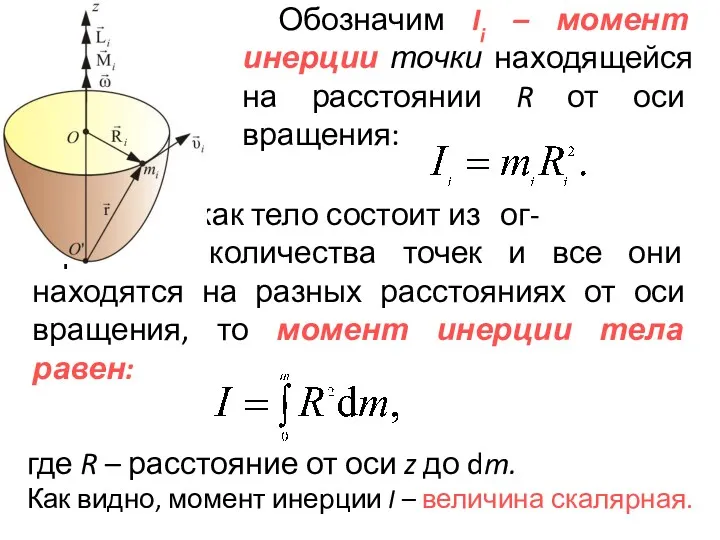
- 34. Обозначим Ii – момент инерции точки находящейся на расстоянии R от оси вращения: Так как тело
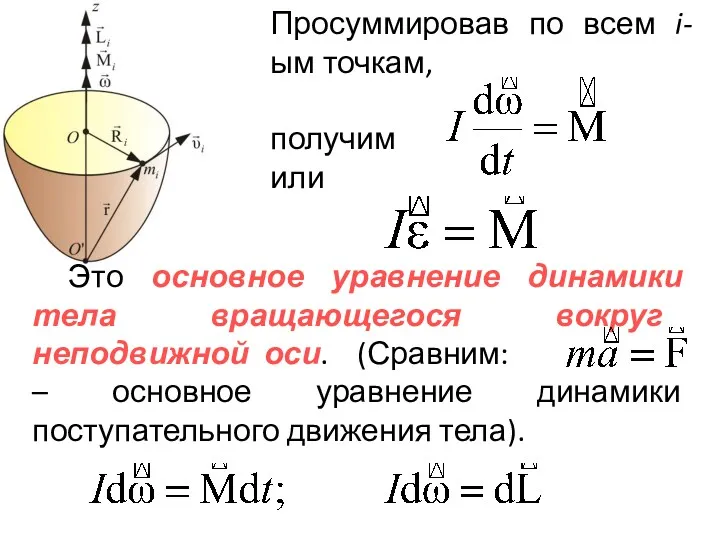
- 35. Просуммировав по всем i-ым точкам, получим или Это основное уравнение динамики тела вращающегося вокруг неподвижной оси.
- 36. Где – момент импульса тела вращающегося вокруг оси z (Сравним: для поступательного движения). При этом помним,
- 37. Повторим основные характеристики вращательного движения Момент импульса Эти формулы получены для одной точки вращающегося твердого тела
- 38. Момент инерции некоторых простых тел.
- 39. Моменты инерции тел правильной геометрической формы относительно оси вращения, проходящей через центр инерции
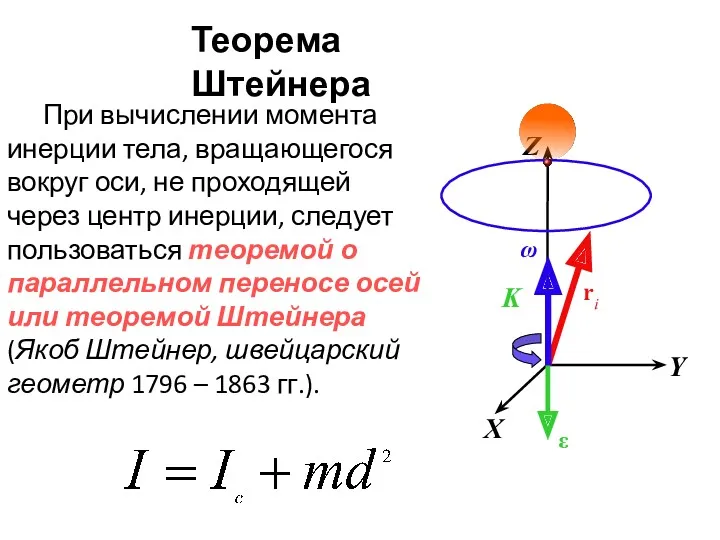
- 40. X Y Z K ri ω ε При вычислении момента инерции тела, вращающегося вокруг оси, не
- 41. Момент инерции тела относительно любой оси вращения равен моменту его инерции относительно параллельной оси, проходящей через
- 42. Пример: стержень массой m, длиной l, вращается вокруг оси, проходящей через конец стержня (рис).
- 43. Работа и энергия Энергия — универсальная мера различных форм движения и взаимодействия. Энергия бывает: механическая, тепловая,
- 44. При криволинейном движении сила может изменяться как по модулю, так и по направлению. Работа силы на
- 45. Для вычисления этого интеграла надо знать зависимость силы Fs от пути s вдоль траектории 1—2. Единица
- 46. За время dt сила F совершает работу Fdr, а мощность, развиваемая этой силой, в данный момент
- 47. Кинетическая энергия механической системы — это энергия механического движения этой системы. Кинетическая и потенциальная энергии Приращение
- 48. Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между
- 49. «в системе тел, между которыми действуют только консервативные силы, полная механическая энергия сохраняется». Закон сохранение механической
- 50. Механические системы, на тела которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами. Закон
- 52. момент импульса – это физическая величина, равная произведению момента инерции тела на угловую скорость. Если момент
- 53. Дифференциал равен нулю, когда значение числа под дифференциалом постоянно, а это может быть только в том
- 54. Кинетическая энергия материальной точки mi, вращаясь вокруг оси с линейной скоростью Vi, определяется Подставим значение линейной
- 55. кинетическая энергия вращающегося тела Если тело одновременно участвует во вращательном и поступательном движениях, то его полная
- 56. P = L= m J
- 57. «энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой».
- 58. Специальная теория относительности Теория относительности – физическая теория, рассматривающая пространственно-временные закономерности, справедливые для любых физических процессов
- 59. Однако законы электродинамики находились в противоречии с преобразованиями Галилея. Эйнштейн заменил преобразования Галилея преобразованиями Лоренца, что
- 60. Постулаты Эйнштейна
- 61. Преобразования Галилея Напомним преобразования Галилея
- 62. Преобразования Лоренца Формулы преобразования при переходе из одной инерциальной системы в другую с учетом постулатов Эйнштейна
- 63. Преобразования Лоренца Лоренц установил связь между координатами и временем события в системах отсчета k и k'
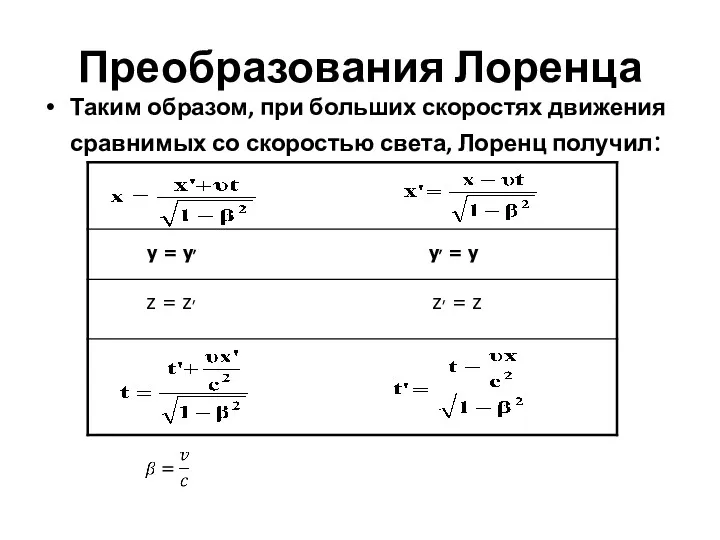
- 64. Преобразования Лоренца Таким образом, при больших скоростях движения сравнимых со скоростью света, Лоренц получил:
- 65. Преобразования Лоренца Истинный физический смысл этих формул был впервые установлен Эйнштейном в 1905 г. в СТО.
- 66. Преобразования Лоренца При малых скоростях движения или при бесконечной скорости распространения взаимодействий ( теория дальнодействия) преобразования
- 67. Следствия из преобразований Лоренца Одновременность событий в СТО По Ньютону, если два события происходят одновременно, то
- 68. Следствия из преобразований Лоренца Одновременность событий в СТО Возьмем два источника света на Земле А и
- 69. Следствия из преобразований Лоренца Одновременность событий в СТО Если свет встретится на середине АВ, то вспышки
- 70. Следствия из преобразований Лоренца Одновременность событий в СТО Пусть в системе k (на Земле) в точках
- 71. Следствия из преобразований Лоренца Одновременность событий в СТО Получим:
- 72. Следствия из преобразований Лоренца Одновременность событий в СТО Если события в системе k происходят одновременно в
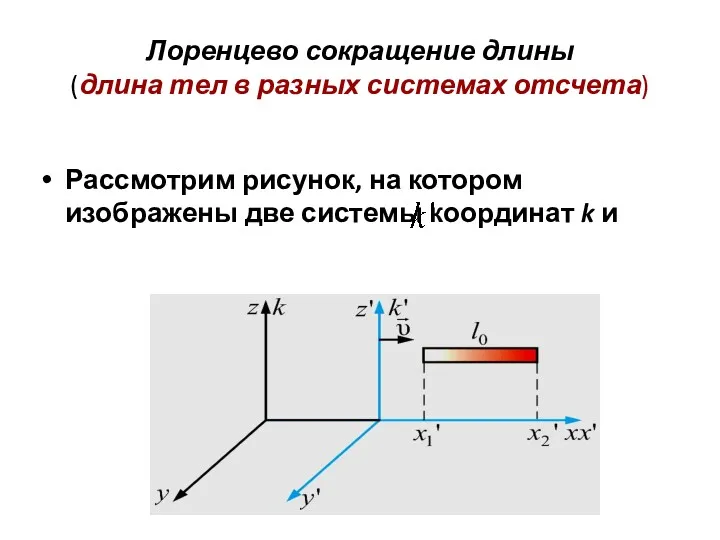
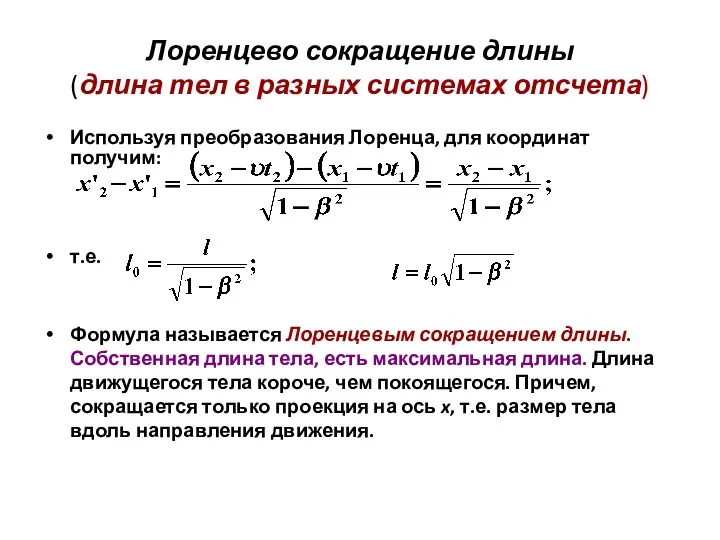
- 73. Лоренцево сокращение длины (длина тел в разных системах отсчета) Рассмотрим рисунок, на котором изображены две системы
- 74. Лоренцево сокращение длины (длина тел в разных системах отсчета) Пусть – собственная длина тела в системе,
- 75. Лоренцево сокращение длины (длина тел в разных системах отсчета) Используя преобразования Лоренца, для координат получим: т.е.
- 76. Замедление времени (длительность событий в разных системах отсчета) Пусть вспышка лампы на ракете, где -собственное время,
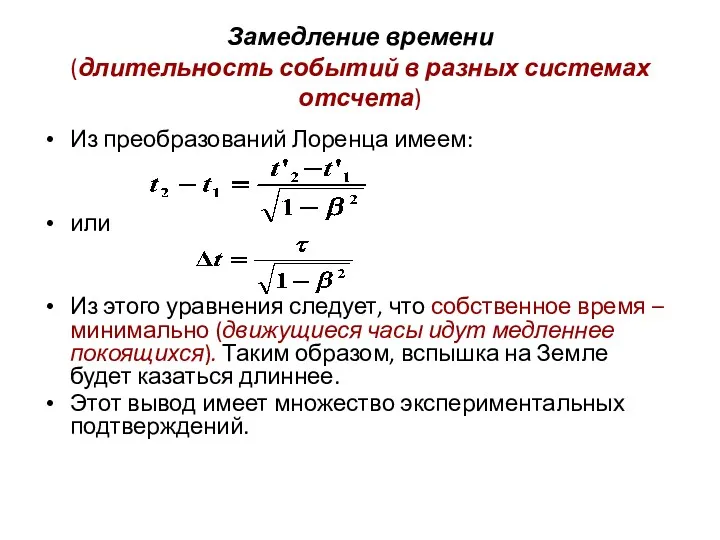
- 77. Замедление времени (длительность событий в разных системах отсчета) Из преобразований Лоренца имеем: или Из этого уравнения
- 78. Сложение скоростей в релятивистской механике Пусть тело внутри космического корабля движется со скоростью Сам корабль движется
- 79. Сложение скоростей в релятивистской механике Классическая механика Но скорость света является предельной скоростью переноса информации, вещества
- 80. Сложение скоростей в релятивистской механике Внутри корабля перемещение dx' за время dt' равно Найдем dx и
- 81. Сложение скоростей в релятивистской механике Так как , то: Эта формула выражает правило сложения скоростей в
- 82. Сложение скоростей в релятивистской механике Для у – вой компоненты скорости, если движение частицы происходит не
- 83. Релятивистская динамика Релятивистский импульс В векторной форме Релятивистское выражение для полной энергии
- 84. Релятивистская динамика При , в системе координат, где частица покоится, полная энергия равна энергии покоя: Полная
- 85. Релятивистская динамика Соотношение, связывающее полную энергию с импульсом частицы. Это выражение, связывающее энергию и импульс является
- 86. Релятивистская динамика Основное уравнение динамики в релятивистском случае: Из этого уравнения следует, что вектор ускорения частицы,
- 87. Принцип соответствия Преобразования Лоренца переходят в преобразования Галилея при условии Таким образом, механика Ньютона является предельным
- 88. Безмассовые частицы Рассмотрим частицу, движущуюся со скоростью света . Для такой частицы . В соответствии с
- 90. Скачать презентацию
Литература:
1. Трофимова Т.И. Курс физики: учеб. пособие для инженерно-технич. специальностей вузов
Литература:
1. Трофимова Т.И. Курс физики: учеб. пособие для инженерно-технич. специальностей вузов
Механика
Механика — часть физики, которая изучает закономерности механического движения и
Механика
Механика — часть физики, которая изучает закономерности механического движения и
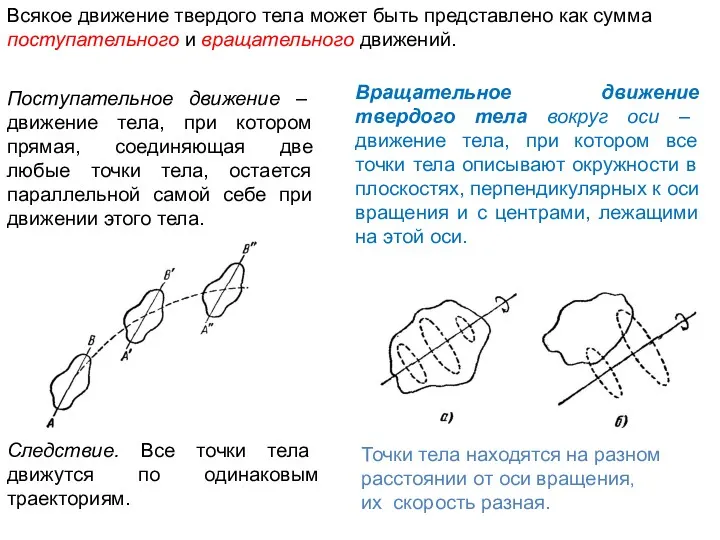
Всякое движение твердого тела может быть представлено как сумма поступательного и
Всякое движение твердого тела может быть представлено как сумма поступательного и
Модели в механике (определения):
Материальная точка — тело, обладающее массой, размерами которого
Модели в механике (определения):
Материальная точка — тело, обладающее массой, размерами которого
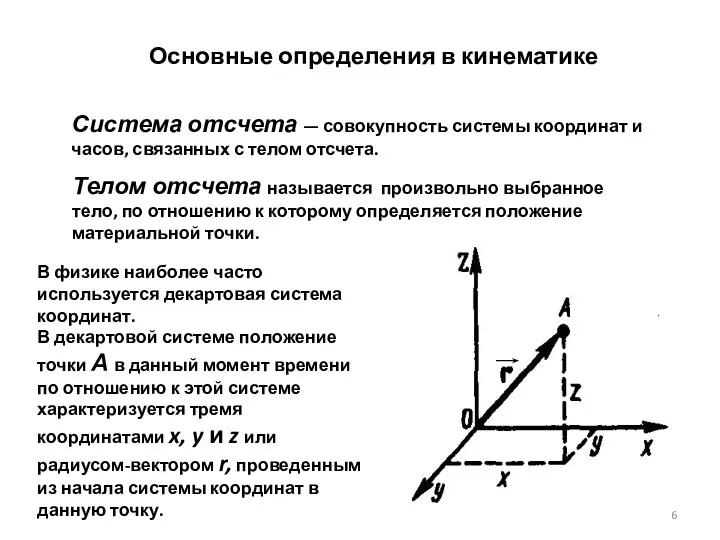
Основные определения в кинематике
Система отсчета — совокупность системы координат и
Основные определения в кинематике
Система отсчета — совокупность системы координат и
При движении материальной точки ее координаты определяется скалярными уравнениями:
x =
При движении материальной точки ее координаты определяется скалярными уравнениями:
x =
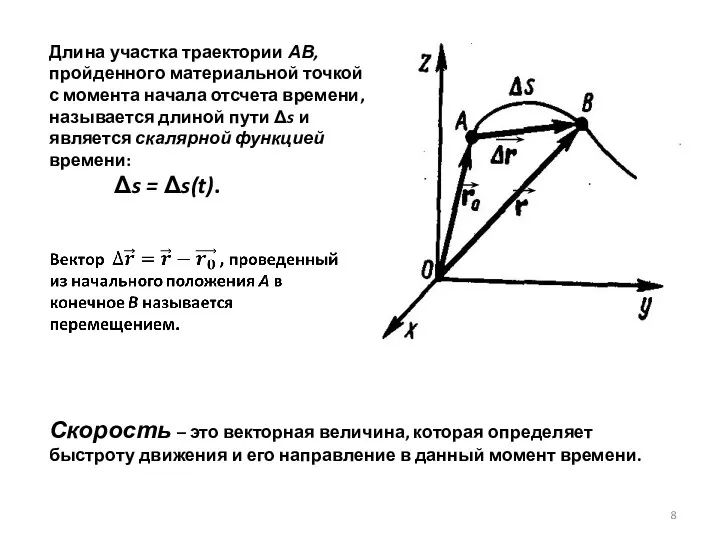
Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета
Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета
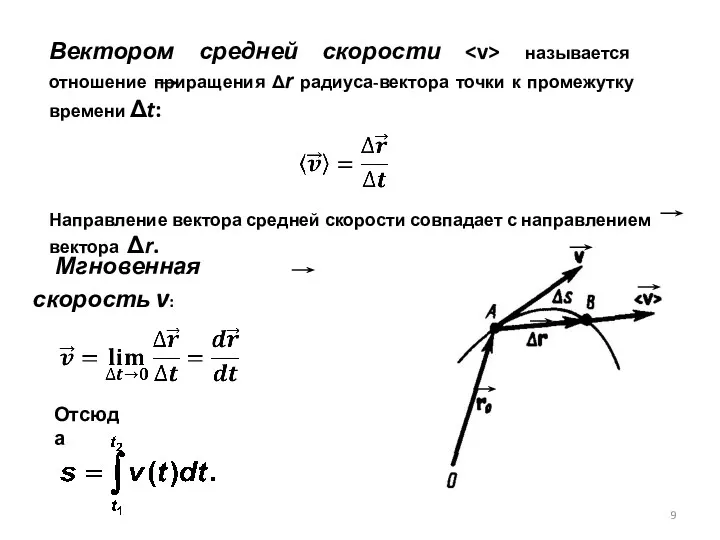
Вектором средней скорости называется отношение приращения Δr радиуса-вектора точки к
Вектором средней скорости
Ускорение
Ускорение – это физическая величина, характеризующая быстроту изменения скорости по
Ускорение
Ускорение – это физическая величина, характеризующая быстроту изменения скорости по
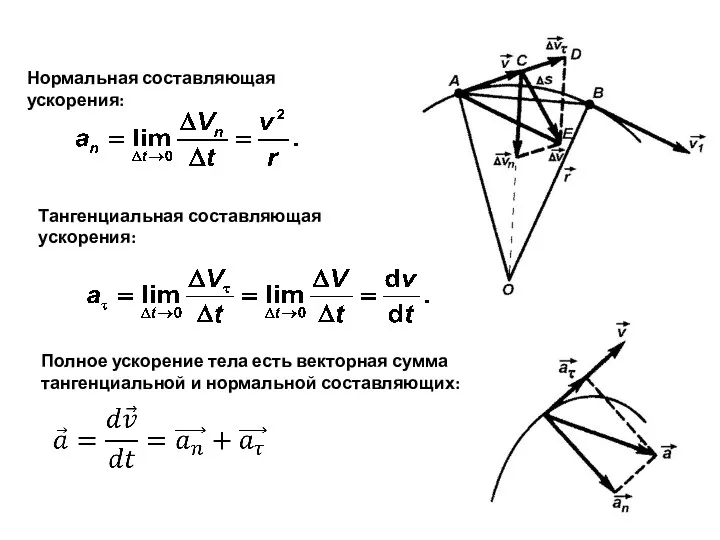
Тангенциальная составляющая ускорения:
Нормальная составляющая ускорения:
Полное ускорение тела есть векторная сумма
Тангенциальная составляющая ускорения:
Нормальная составляющая ускорения:
Полное ускорение тела есть векторная сумма
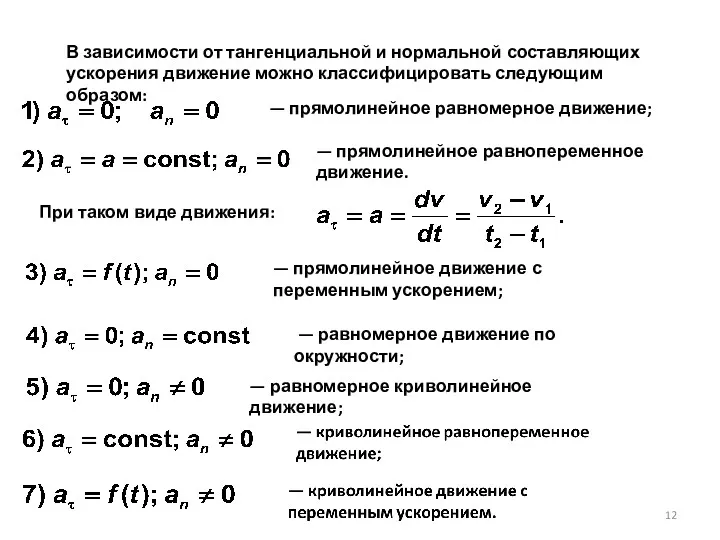
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать
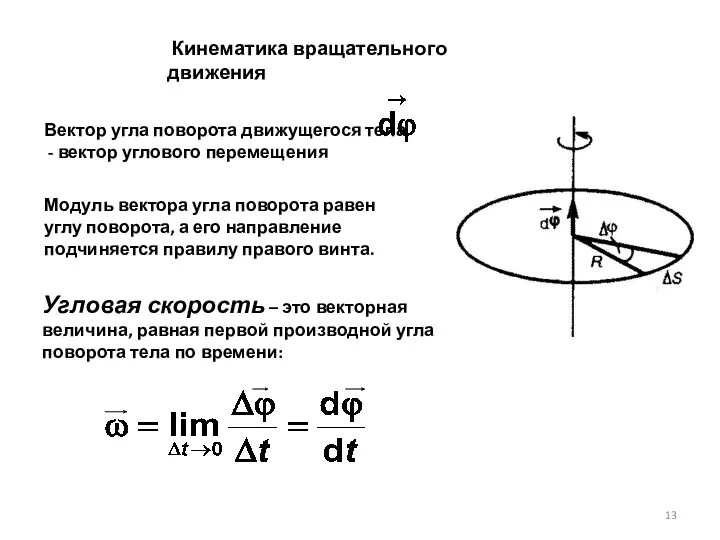
Кинематика вращательного движения
Модуль вектора угла поворота равен углу поворота, а
Кинематика вращательного движения
Модуль вектора угла поворота равен углу поворота, а
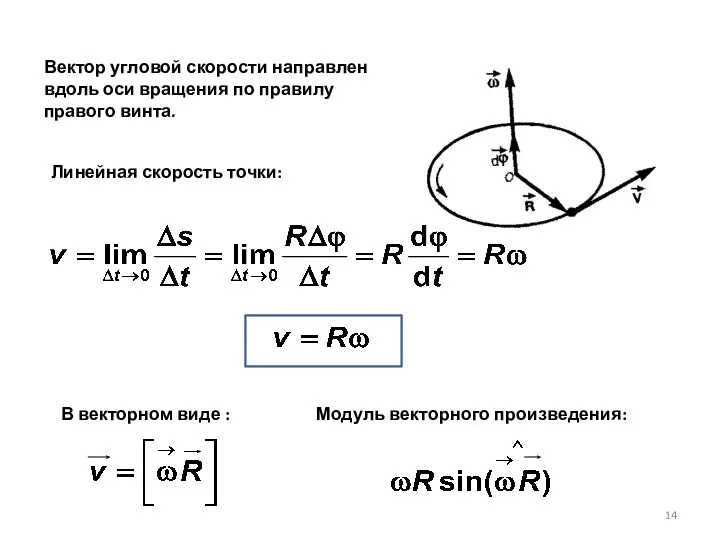
Вектор угловой скорости направлен вдоль оси вращения по правилу правого винта.
Вектор угловой скорости направлен вдоль оси вращения по правилу правого винта.
При равномерном вращательном движении период равен:
Число оборотов в единицу времени (частота
При равномерном вращательном движении период равен:
Число оборотов в единицу времени (частота
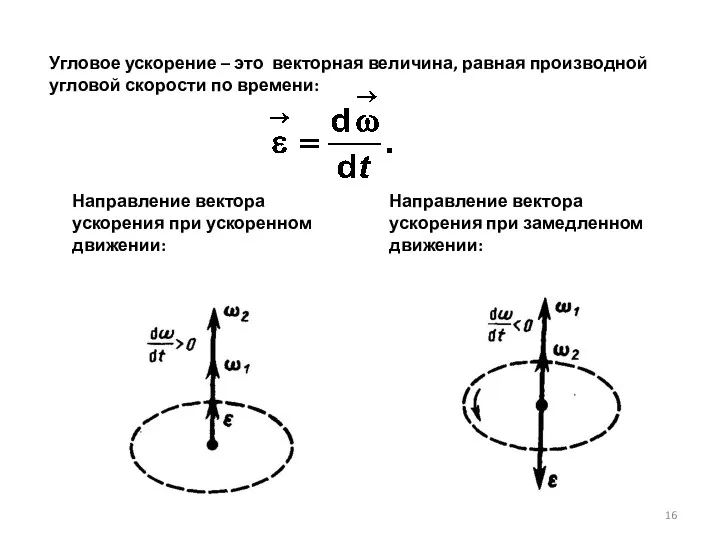
Угловое ускорение – это векторная величина, равная производной угловой скорости по
Угловое ускорение – это векторная величина, равная производной угловой скорости по
Тангенциальная составляющая ускорения:
Нормальная составляющая ускорения:
Тангенциальная составляющая ускорения:
Нормальная составляющая ускорения:
В случае равнопеременного движения точки по окружности (ε=const):
Связь между линейными и
В случае равнопеременного движения точки по окружности (ε=const):
Связь между линейными и
Динамика материальной точки
«Всякая материальная точка (тело) сохраняет состояние покоя или
Динамика материальной точки
«Всякая материальная точка (тело) сохраняет состояние покоя или
Масса тела — физическая величина, являющаяся одной из основных характеристик материи,
Масса тела — физическая величина, являющаяся одной из основных характеристик материи,
Импульсом материальной точки (количеством движения) называется векторная величина численно равная произведению
Импульсом материальной точки (количеством движения) называется векторная величина численно равная произведению
Третий закон Ньютона:
«Силы, с которыми действуют друг на друга материальные точки,
Третий закон Ньютона:
«Силы, с которыми действуют друг на друга материальные точки,
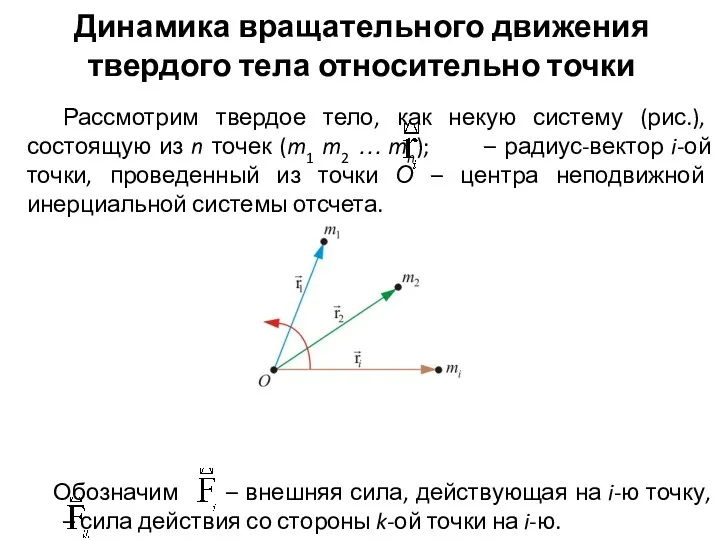
Динамика вращательного движения твердого тела относительно точки
Рассмотрим твердое тело, как некую
Динамика вращательного движения твердого тела относительно точки
Рассмотрим твердое тело, как некую
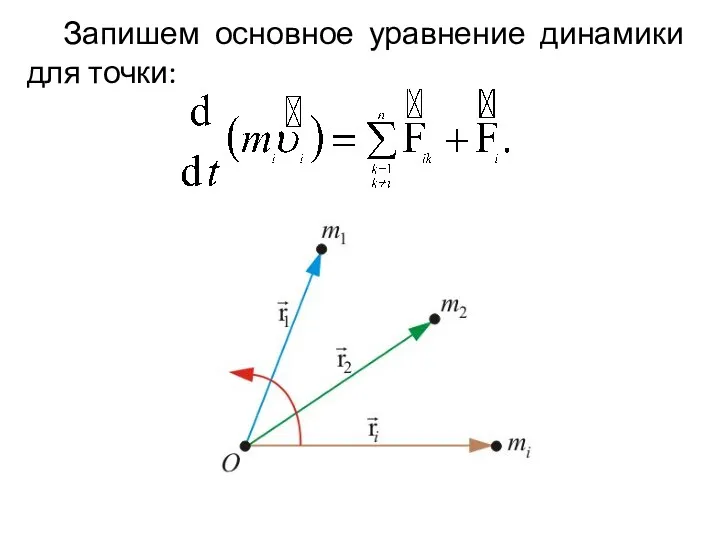
Запишем основное уравнение динамики для точки:
Запишем основное уравнение динамики для точки:
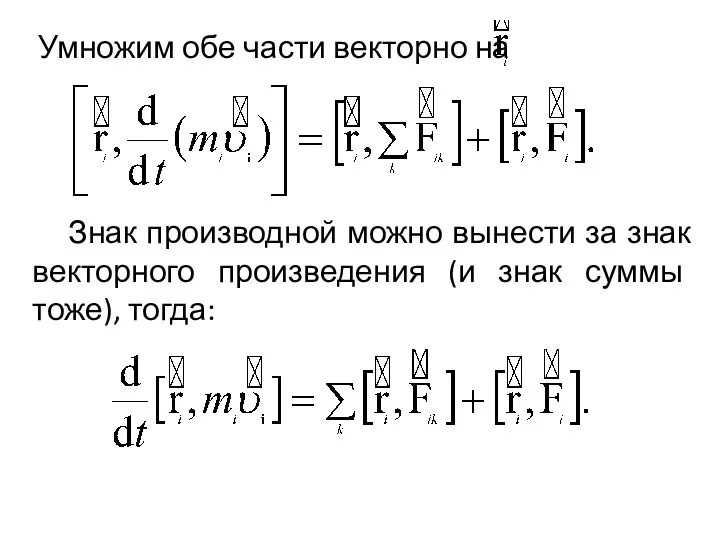
Умножим обе части векторно на
Знак производной можно вынести за знак
Умножим обе части векторно на
Знак производной можно вынести за знак
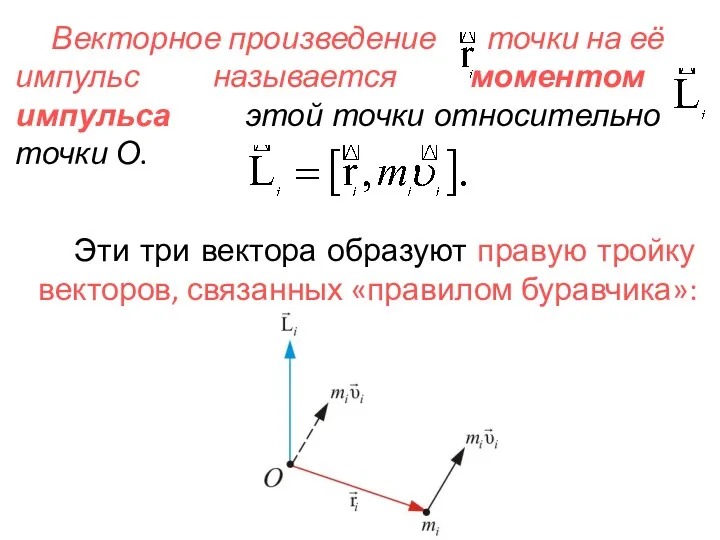
Векторное произведение точки на её импульс называется моментом импульса этой точки
Векторное произведение точки на её импульс называется моментом импульса этой точки
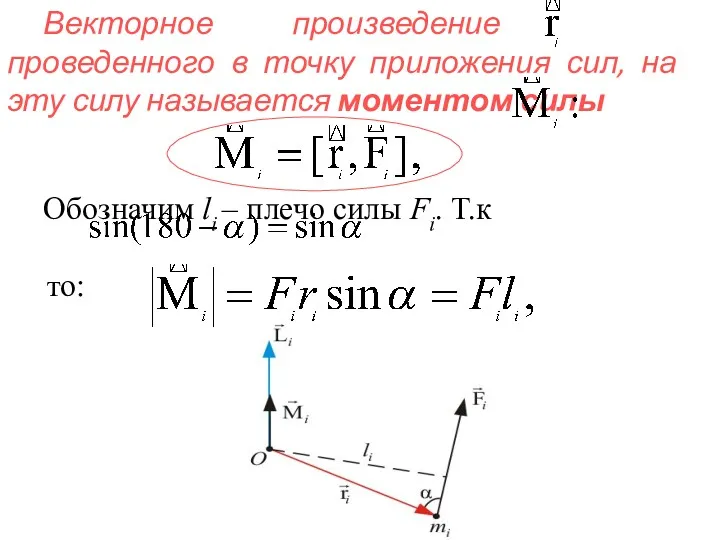
Векторное произведение
проведенного в точку приложения сил, на эту силу называется
Векторное произведение
проведенного в точку приложения сил, на эту силу называется
C учетом новых обозначений:
Запишем систему n уравнений для всех точек
C учетом новых обозначений:
Запишем систему n уравнений для всех точек
Здесь сумма производных равна производной суммы:
где – момент импульса системы,
Здесь сумма производных равна производной суммы:
где – момент импульса системы,
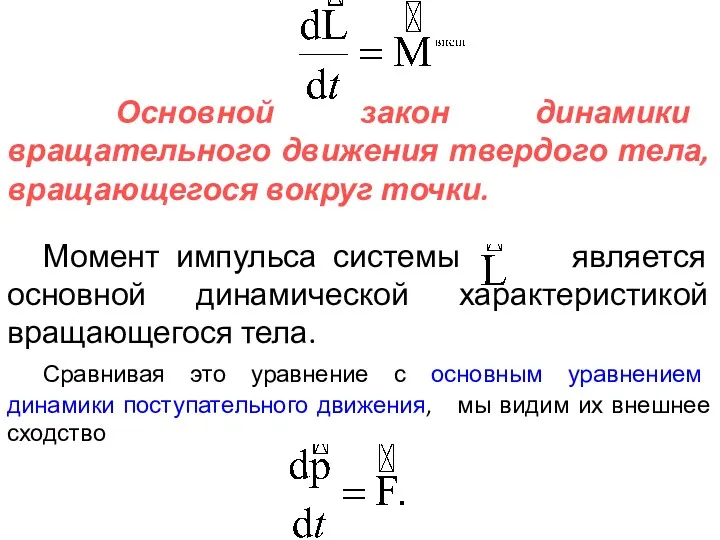
Основной закон динамики вращательного движения твердого тела, вращающегося вокруг точки.
Момент импульса
Основной закон динамики вращательного движения твердого тела, вращающегося вокруг точки.
Момент импульса
Динамика вращательного движения твердого тела
относительно оси
Динамика вращательного движения твердого тела
относительно оси
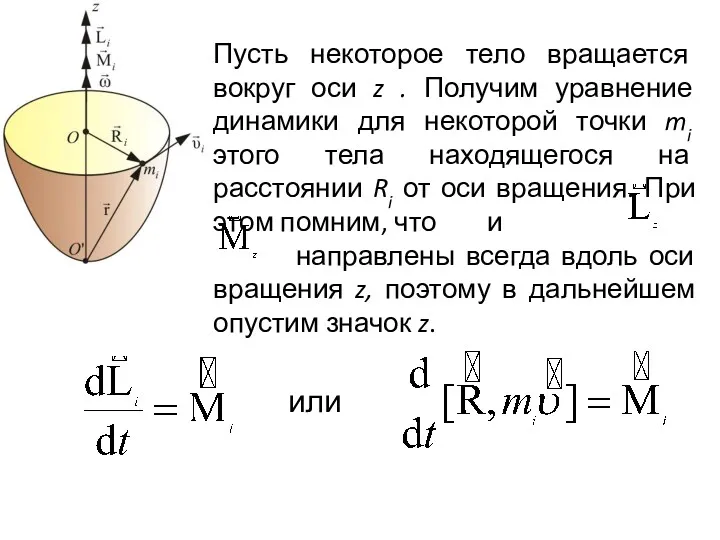
Пусть некоторое тело вращается вокруг оси z . Получим уравнение динамики
Пусть некоторое тело вращается вокруг оси z . Получим уравнение динамики
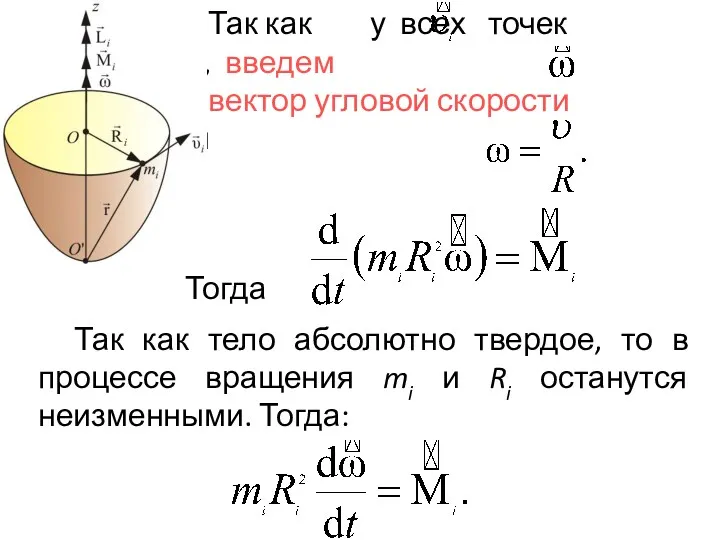
Так как у всех точек разная, введем
вектор угловой скорости причем
Так как у всех точек разная, введем
вектор угловой скорости причем
Обозначим Ii – момент инерции точки находящейся на расстоянии R от
Обозначим Ii – момент инерции точки находящейся на расстоянии R от
Просуммировав по всем i-ым точкам,
получим
или
Это основное уравнение динамики тела
Просуммировав по всем i-ым точкам,
получим
или
Это основное уравнение динамики тела
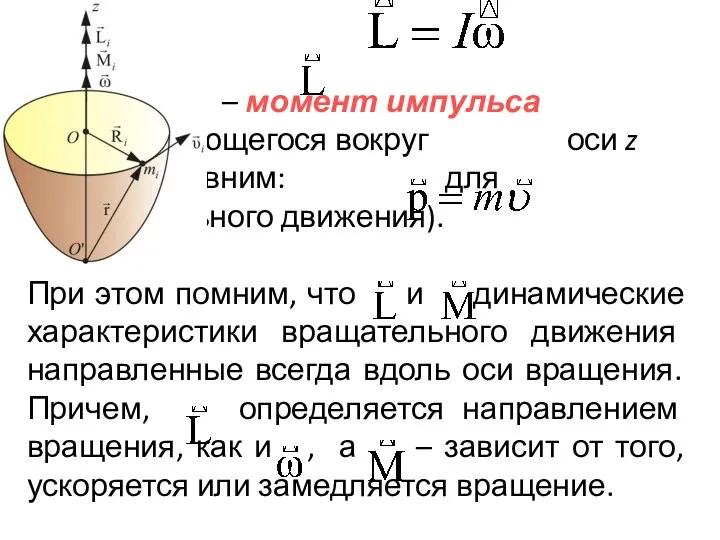
Где – момент импульса тела вращающегося вокруг оси z
(Сравним: для поступательного
Где – момент импульса тела вращающегося вокруг оси z
(Сравним: для поступательного
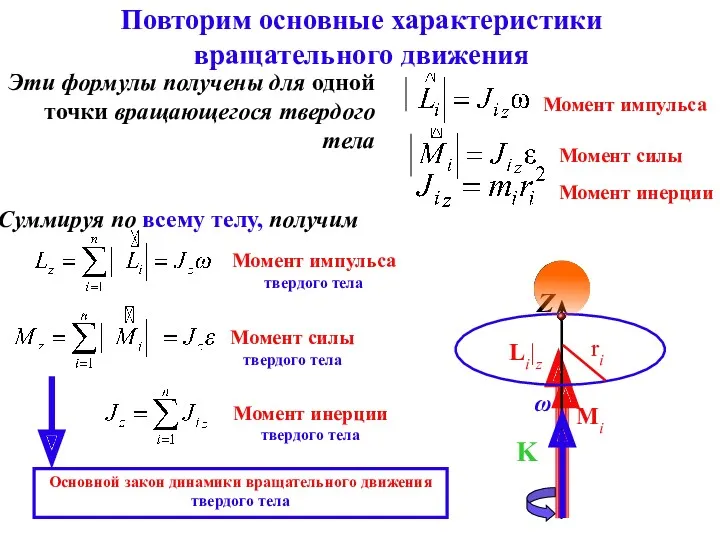
Повторим основные характеристики вращательного движения
Момент импульса
Эти формулы получены для одной точки
Повторим основные характеристики вращательного движения
Момент импульса
Эти формулы получены для одной точки
Момент инерции некоторых простых тел.
Момент инерции некоторых простых тел.
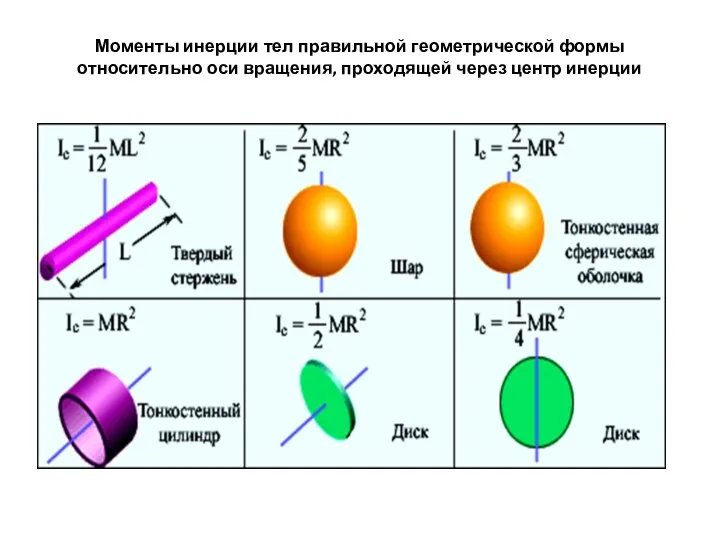
Моменты инерции тел правильной геометрической формы относительно оси вращения, проходящей через
Моменты инерции тел правильной геометрической формы относительно оси вращения, проходящей через
X
Y
Z
K
ri
ω
ε
При вычислении момента инерции тела, вращающегося вокруг оси, не проходящей через
X
Y
Z
K
ri
ω
ε
При вычислении момента инерции тела, вращающегося вокруг оси, не проходящей через
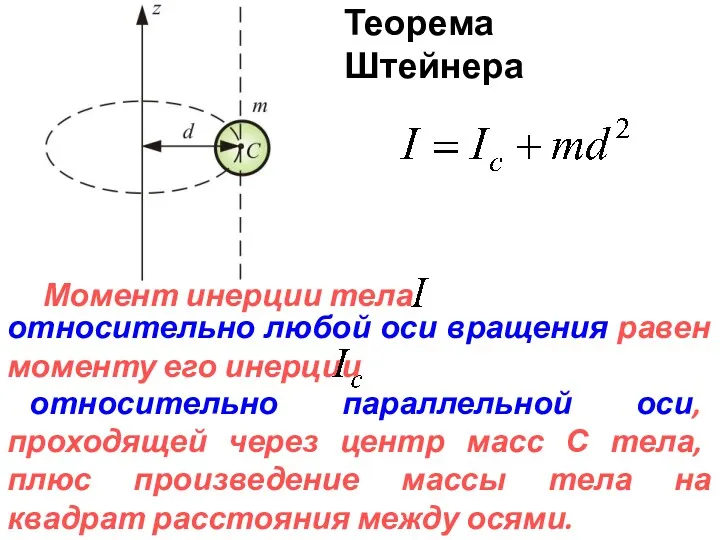
Момент инерции тела
относительно любой оси вращения равен моменту его инерции
Момент инерции тела
относительно любой оси вращения равен моменту его инерции
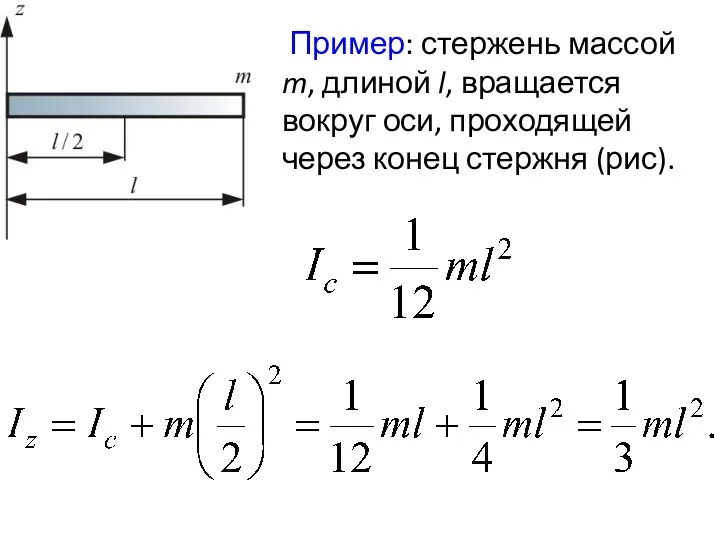
Пример: стержень массой m, длиной l, вращается вокруг оси, проходящей
Пример: стержень массой m, длиной l, вращается вокруг оси, проходящей
Работа и энергия
Энергия — универсальная мера различных форм движения и
Работа и энергия
Энергия — универсальная мера различных форм движения и
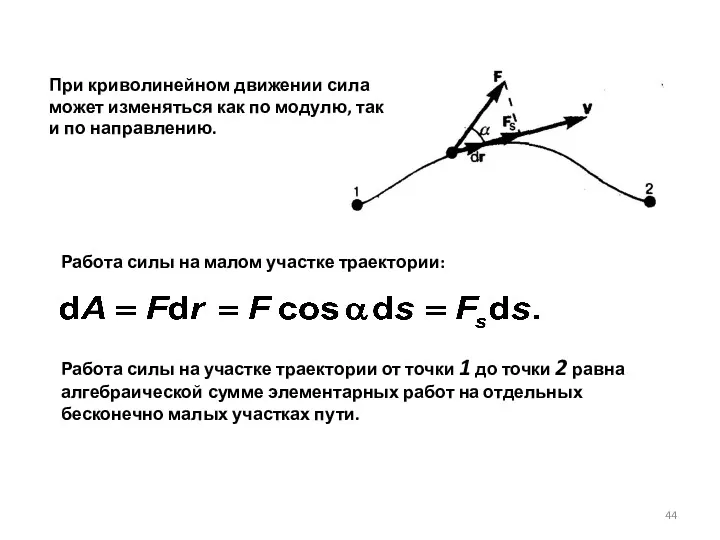
При криволинейном движении сила может изменяться как по модулю, так и
При криволинейном движении сила может изменяться как по модулю, так и
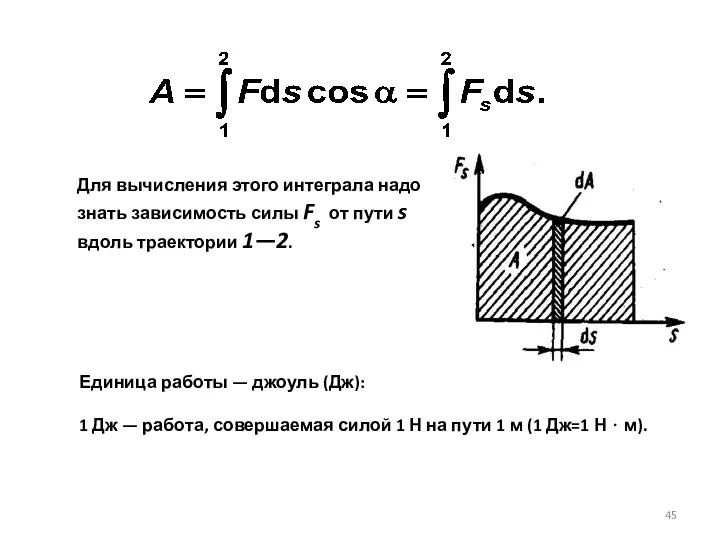
Для вычисления этого интеграла надо знать зависимость силы Fs от пути
Для вычисления этого интеграла надо знать зависимость силы Fs от пути
За время dt сила F совершает работу Fdr,
а мощность, развиваемая
За время dt сила F совершает работу Fdr,
а мощность, развиваемая
Кинетическая энергия механической системы — это энергия механического движения этой системы.
Кинетическая
Кинетическая энергия механической системы — это энергия механического движения этой системы.
Кинетическая
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением
«в системе тел, между которыми действуют только консервативные силы, полная механическая
«в системе тел, между которыми действуют только консервативные силы, полная механическая
Механические системы, на тела которых действуют только консервативные силы (внутренние и
Механические системы, на тела которых действуют только консервативные силы (внутренние и
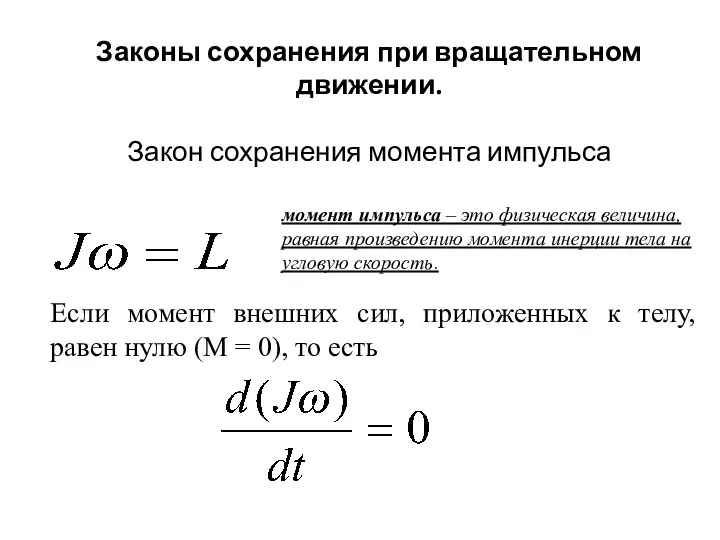
момент импульса – это физическая величина, равная произведению момента инерции
момент импульса – это физическая величина, равная произведению момента инерции
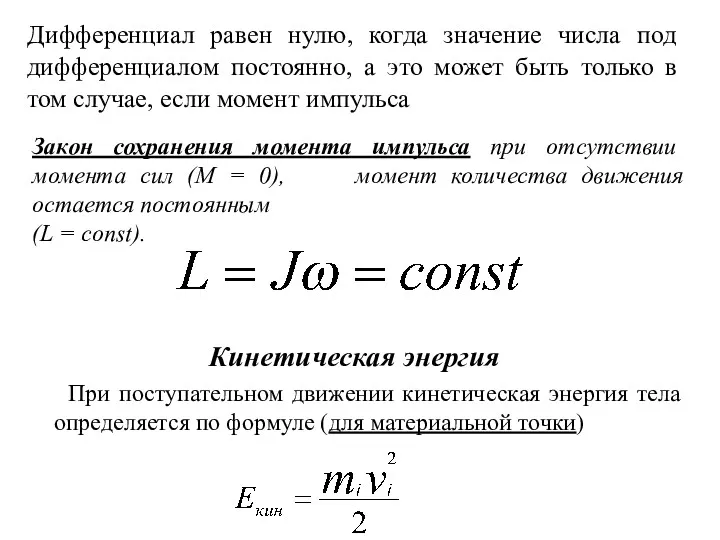
Дифференциал равен нулю, когда значение числа под дифференциалом постоянно, а это
Дифференциал равен нулю, когда значение числа под дифференциалом постоянно, а это
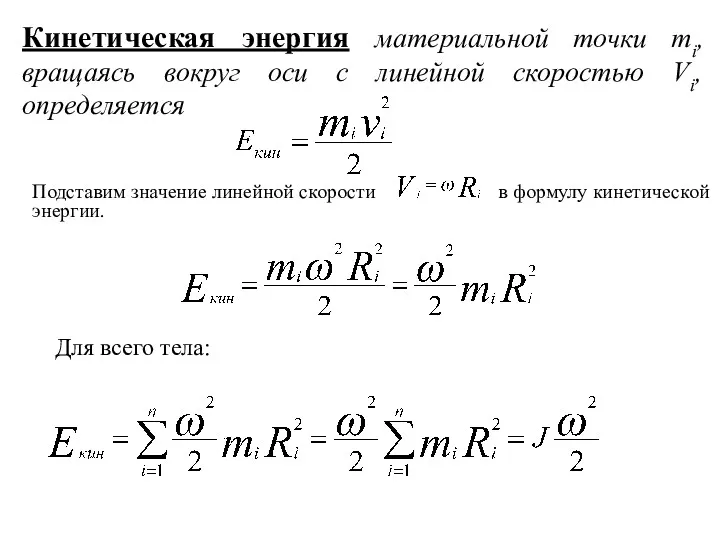
Кинетическая энергия материальной точки mi, вращаясь вокруг оси с линейной скоростью
Кинетическая энергия материальной точки mi, вращаясь вокруг оси с линейной скоростью
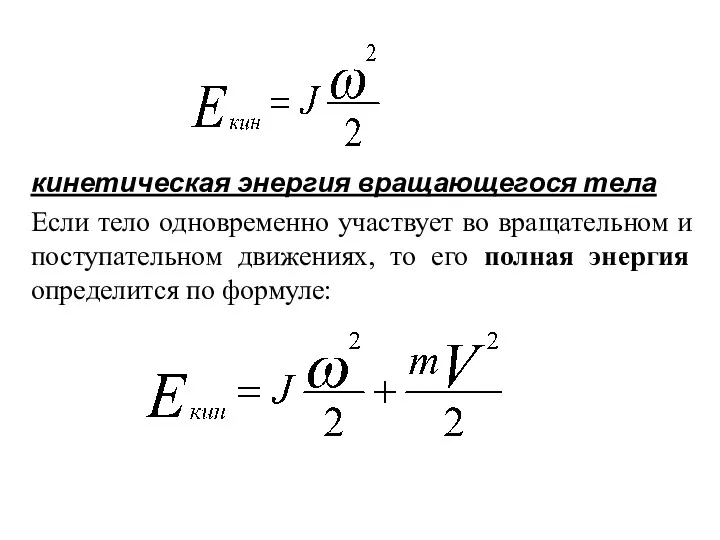
кинетическая энергия вращающегося тела
Если тело одновременно участвует во вращательном и поступательном
кинетическая энергия вращающегося тела
Если тело одновременно участвует во вращательном и поступательном
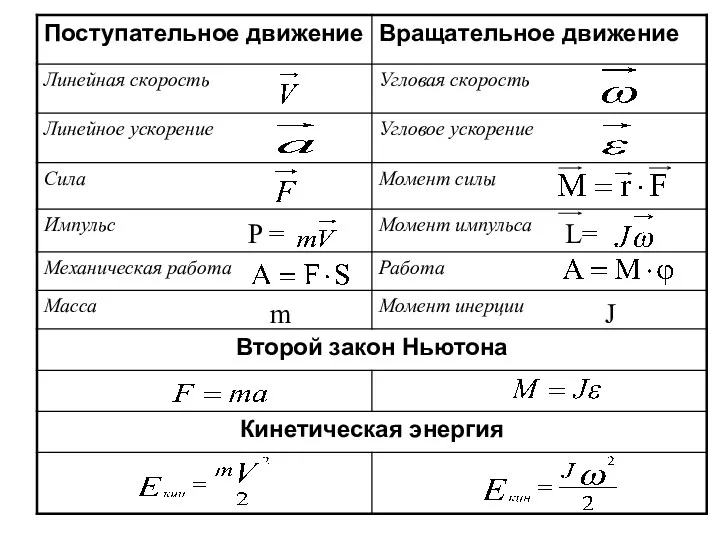
P =
L=
m
J
P =
L=
m
J
«энергия никогда не исчезает и не появляется вновь, она лишь превращается
«энергия никогда не исчезает и не появляется вновь, она лишь превращается
Специальная теория относительности
Теория относительности – физическая теория, рассматривающая пространственно-временные закономерности, справедливые
Специальная теория относительности
Теория относительности – физическая теория, рассматривающая пространственно-временные закономерности, справедливые
Однако законы электродинамики находились в противоречии с преобразованиями Галилея.
Эйнштейн заменил
Однако законы электродинамики находились в противоречии с преобразованиями Галилея.
Эйнштейн заменил
Постулаты Эйнштейна
Постулаты Эйнштейна
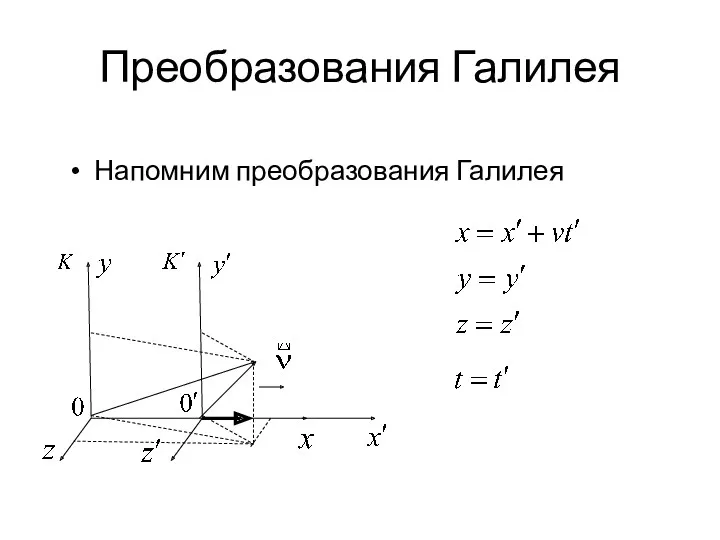
Преобразования Галилея
Напомним преобразования Галилея
Преобразования Галилея
Напомним преобразования Галилея
Преобразования Лоренца
Формулы преобразования при переходе из одной инерциальной системы в другую
Преобразования Лоренца
Формулы преобразования при переходе из одной инерциальной системы в другую
Преобразования Лоренца
Лоренц установил связь между координатами и временем события в системах
Преобразования Лоренца
Лоренц установил связь между координатами и временем события в системах
Преобразования Лоренца
Таким образом, при больших скоростях движения сравнимых со скоростью света,
Преобразования Лоренца
Таким образом, при больших скоростях движения сравнимых со скоростью света,
Преобразования Лоренца
Истинный физический смысл этих формул был впервые установлен Эйнштейном в
Преобразования Лоренца
Истинный физический смысл этих формул был впервые установлен Эйнштейном в
Преобразования Лоренца
При малых скоростях движения или при бесконечной скорости распространения взаимодействий
Преобразования Лоренца
При малых скоростях движения или при бесконечной скорости распространения взаимодействий
Следствия из преобразований Лоренца
Одновременность событий в СТО
По Ньютону, если два
Следствия из преобразований Лоренца
Одновременность событий в СТО
По Ньютону, если два

Следствия из преобразований Лоренца
Одновременность событий в СТО
Возьмем два источника света
Следствия из преобразований Лоренца
Одновременность событий в СТО
Возьмем два источника света
Следствия из преобразований Лоренца
Одновременность событий в СТО
Если свет встретится на
Следствия из преобразований Лоренца
Одновременность событий в СТО
Если свет встретится на
Следствия из преобразований Лоренца
Одновременность событий в СТО
Пусть в системе k
Следствия из преобразований Лоренца
Одновременность событий в СТО
Пусть в системе k
Следствия из преобразований Лоренца
Одновременность событий в СТО
Получим:
Следствия из преобразований Лоренца
Одновременность событий в СТО
Получим:
Следствия из преобразований Лоренца
Одновременность событий в СТО
Если события в системе
Следствия из преобразований Лоренца
Одновременность событий в СТО
Если события в системе
Лоренцево сокращение длины
(длина тел в разных системах отсчета)
Рассмотрим рисунок, на котором
Лоренцево сокращение длины
(длина тел в разных системах отсчета)
Рассмотрим рисунок, на котором
Лоренцево сокращение длины
(длина тел в разных системах отсчета)
Пусть – собственная длина
Лоренцево сокращение длины
(длина тел в разных системах отсчета)
Пусть – собственная длина
Лоренцево сокращение длины
(длина тел в разных системах отсчета)
Используя преобразования Лоренца, для
Лоренцево сокращение длины
(длина тел в разных системах отсчета)
Используя преобразования Лоренца, для
Замедление времени
(длительность событий в разных системах отсчета)
Пусть вспышка лампы на ракете,
Замедление времени
(длительность событий в разных системах отсчета)
Пусть вспышка лампы на ракете,
Замедление времени
(длительность событий в разных системах отсчета)
Из преобразований Лоренца имеем:
или
Замедление времени
(длительность событий в разных системах отсчета)
Из преобразований Лоренца имеем:
или
Сложение скоростей в релятивистской механике
Пусть тело внутри космического корабля движется со
Сложение скоростей в релятивистской механике
Пусть тело внутри космического корабля движется со
Сложение скоростей в релятивистской механике
Классическая механика
Но скорость света является предельной скоростью
Сложение скоростей в релятивистской механике
Классическая механика
Но скорость света является предельной скоростью
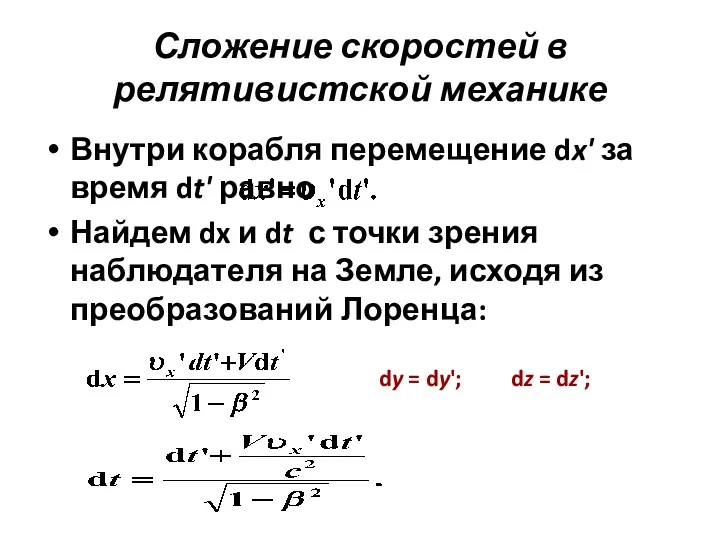
Сложение скоростей в релятивистской механике
Внутри корабля перемещение dx' за время dt'
Сложение скоростей в релятивистской механике
Внутри корабля перемещение dx' за время dt'
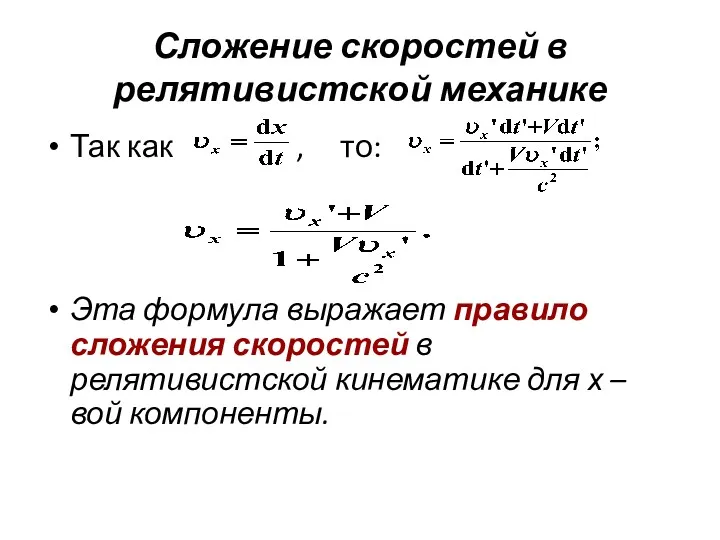
Сложение скоростей в релятивистской механике
Так как , то:
Эта формула выражает правило
Сложение скоростей в релятивистской механике
Так как , то:
Эта формула выражает правило
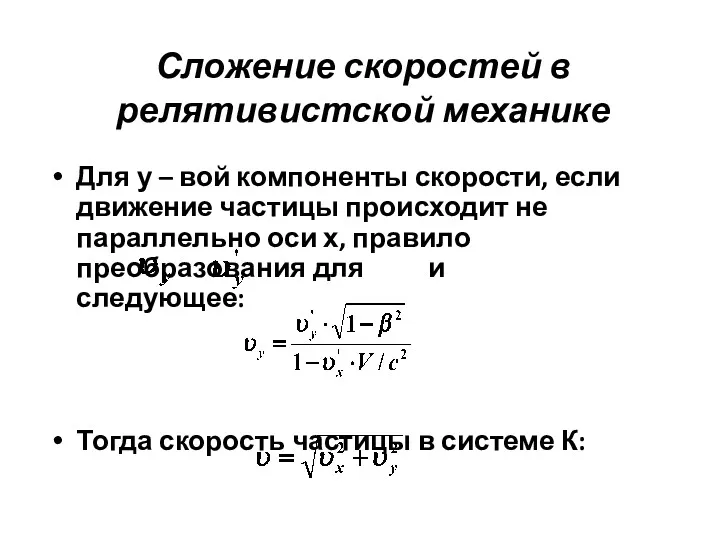
Сложение скоростей в релятивистской механике
Для у – вой компоненты скорости, если
Сложение скоростей в релятивистской механике
Для у – вой компоненты скорости, если
Релятивистская динамика
Релятивистский импульс
В векторной форме
Релятивистское выражение для полной энергии
Релятивистская динамика
Релятивистский импульс
В векторной форме
Релятивистское выражение для полной энергии
Релятивистская динамика
При , в системе координат, где частица покоится, полная энергия
Релятивистская динамика
При , в системе координат, где частица покоится, полная энергия
Релятивистская динамика
Соотношение, связывающее полную энергию с импульсом частицы.
Это выражение, связывающее энергию
Релятивистская динамика
Соотношение, связывающее полную энергию с импульсом частицы.
Это выражение, связывающее энергию
Релятивистская динамика
Основное уравнение динамики в релятивистском случае:
Из этого уравнения следует, что
Релятивистская динамика
Основное уравнение динамики в релятивистском случае:
Из этого уравнения следует, что
Принцип соответствия
Преобразования Лоренца переходят в преобразования Галилея при условии
Таким образом,
Принцип соответствия
Преобразования Лоренца переходят в преобразования Галилея при условии
Таким образом,
Безмассовые частицы
Рассмотрим частицу, движущуюся со скоростью света .
Для такой частицы
Безмассовые частицы
Рассмотрим частицу, движущуюся со скоростью света .
Для такой частицы
 Машина. Основные понятия, классификация
Машина. Основные понятия, классификация ВКР: Границы использования аналитических моделей в диссипативной среде с усредненными параметрами биологической ткани
ВКР: Границы использования аналитических моделей в диссипативной среде с усредненными параметрами биологической ткани Испарение и конденсация. Насыщенный и ненасыщенный пар. Кипение. Влажность
Испарение и конденсация. Насыщенный и ненасыщенный пар. Кипение. Влажность Червячные передачи
Червячные передачи Электродинамика и распространение радиоволн. Лекция 5. Распространение ионосферных радиоволн
Электродинамика и распространение радиоволн. Лекция 5. Распространение ионосферных радиоволн Нелинейная оптика
Нелинейная оптика Давление света
Давление света Спектральна апаратура
Спектральна апаратура Свойства гетерогенных систем. Эффективная диэлектрическая проницаемость
Свойства гетерогенных систем. Эффективная диэлектрическая проницаемость Тепловые явления. Температура
Тепловые явления. Температура Планирование наземной экспериментальной отработки и летных испытаний космических аппаратов
Планирование наземной экспериментальной отработки и летных испытаний космических аппаратов Открытие и наблюдение элементарных частиц
Открытие и наблюдение элементарных частиц Здравствуй,физика!
Здравствуй,физика! Уравнение состояния идеального газа
Уравнение состояния идеального газа Значение деятельности В.Рентгена и А. Г. Столетова
Значение деятельности В.Рентгена и А. Г. Столетова Электростатика. Электродинамика
Электростатика. Электродинамика Техническое обслуживание (ТО) и ремонт системы питания автомобилей
Техническое обслуживание (ТО) и ремонт системы питания автомобилей Функционирование АЭС, аварийные защиты, системы безопасности. (Лекция 6)
Функционирование АЭС, аварийные защиты, системы безопасности. (Лекция 6) Ремонт и обслуживание проточного водонагревателя
Ремонт и обслуживание проточного водонагревателя Электрический ток в вакууме. Электроннолучевая трубка
Электрический ток в вакууме. Электроннолучевая трубка Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256
Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256 Разделение неоднородных систем
Разделение неоднородных систем Презентация к уроку по теме Сила Лоренца
Презентация к уроку по теме Сила Лоренца Задачи к закону Ома для полной цепи
Задачи к закону Ома для полной цепи Subjects: forces in mechanics. Dynamics. Newton’s laws
Subjects: forces in mechanics. Dynamics. Newton’s laws Презентация урок-сказка Взаимодействие тел физика 7 кл
Презентация урок-сказка Взаимодействие тел физика 7 кл Квантовая оптика
Квантовая оптика Химические реакторы. Гетерогенно-каталитические химические процессы. Лекция №11
Химические реакторы. Гетерогенно-каталитические химические процессы. Лекция №11