- Строительство и эксплуатация зданий и сооружений. Техническая механика

Содержание
- 2. Механика Наука о механическом движении материальных тел и происходящих при этом взаимодействиях между телами Под механическим
- 3. Техническая механика — это наука об общих законах механического движения и применения их в современной технике
- 5. 1) Материальная точка объект пренебрежимо малых размеров, имеющий массу; это понятие применимо, если в изучаемом движении
- 6. 2) Абсолютно твёрдое тело тело, расстояние между двумя любыми точками которого всегда остаётся неизменным; это понятие
- 7. 3) Сплошная изменяемая среда это понятие применимо, когда при изучении движения изменяемой среды (деформируемого тела, жидкости,
- 8. Механическое воздействие Взаимодействие материальных тел, в результате которого происходит изменение взаимного положения этих тел в пространстве
- 9. Свободное тело тела, которые не соприкасаются ни с каким другим твердым телом и могут беспрепятственно двигаться
- 10. Несвободное тело соприкасается с другими телами и движется в определенном направлении. Твердые тела, которые ограничивают свободу
- 11. Предмет изучения механики- деформация тел и количественная их оценка Следствия модели абсолютно твёрдого тела: Абсолютная прочность
- 12. Основные понятия Сила – мера механического взаимодействия. Сила моделируется вектором, характеризуемым направлением и величиной (модулем). Кинематическое
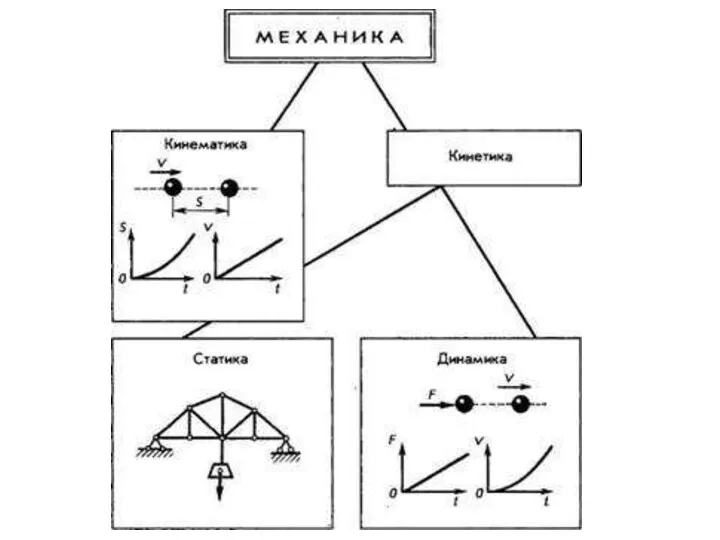
- 13. Статика Статика — это раздел, изучающей равновесие тел под действием сил. Равновесием называют положение тела под
- 14. Основной мерой механического взаимодействия материальных тел является Сила Это действие вызывает изменение скоростей точек тела или
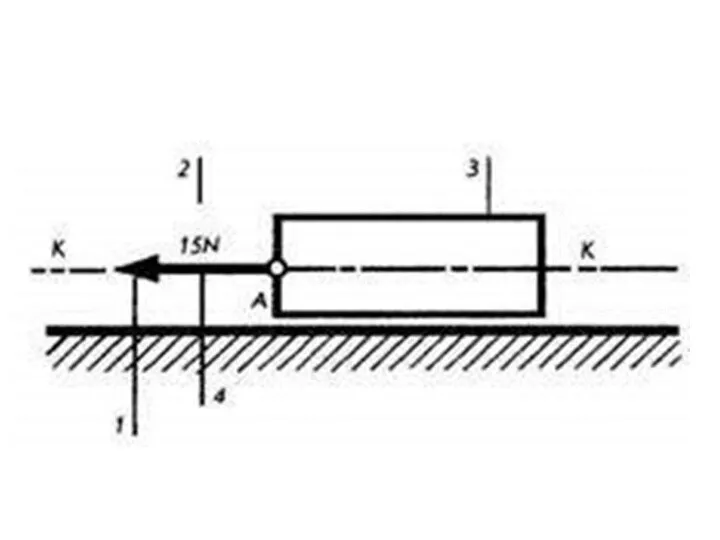
- 15. Сила и ее векторное изображение силой называют всякое воздействие, изменяющее скорость или форму тела. Воздействие на
- 16. Точка А – место приложения силы. Отрезок AB равен модулю силы F. Прямая LM называется линией
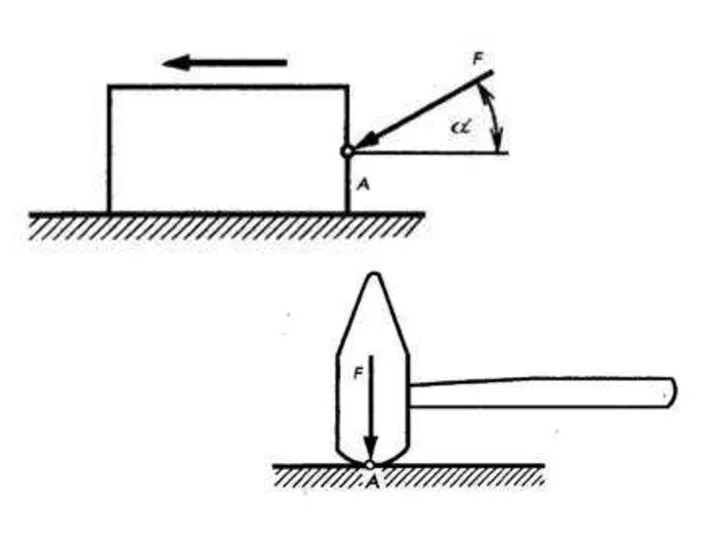
- 17. В зависимости от условий взаимодействия тел возникают различные силы. К примеру, при быстром соприкосновении – сила
- 21. Система сил Совокупность нескольких сил (F1, F2, ... ,Fn) называется системой сил. Если, не нарушая состояния
- 22. Когда система сил ( F 1 , F 2 , ... , Fn ) эквивалентна одной
- 23. Пара сил Равные противоположно направленные параллельные силы представляют собой пару сил. Она действует в так называемой
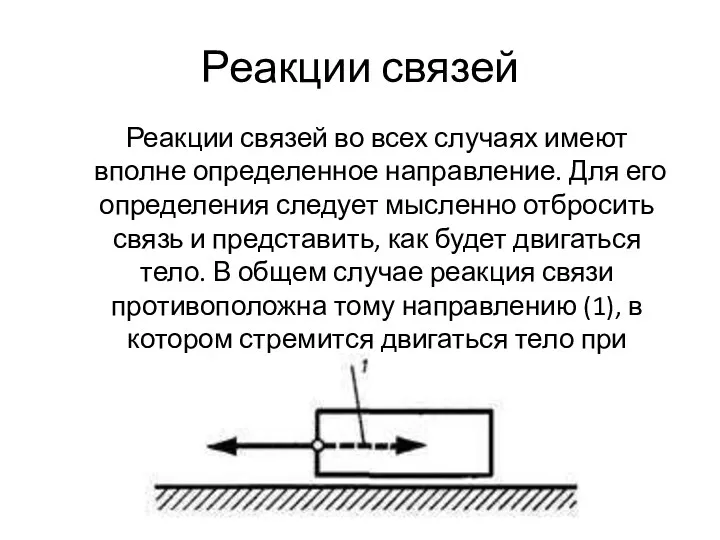
- 24. Реакции связей во всех случаях имеют вполне определенное направление. Для его определения следует мысленно отбросить связь
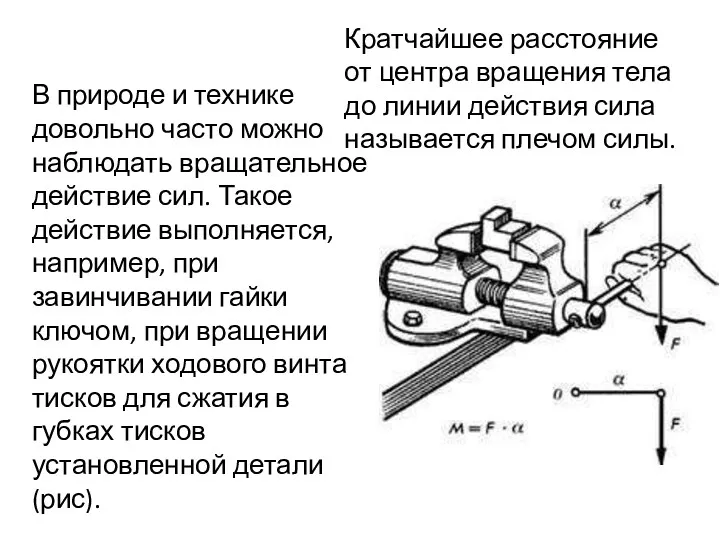
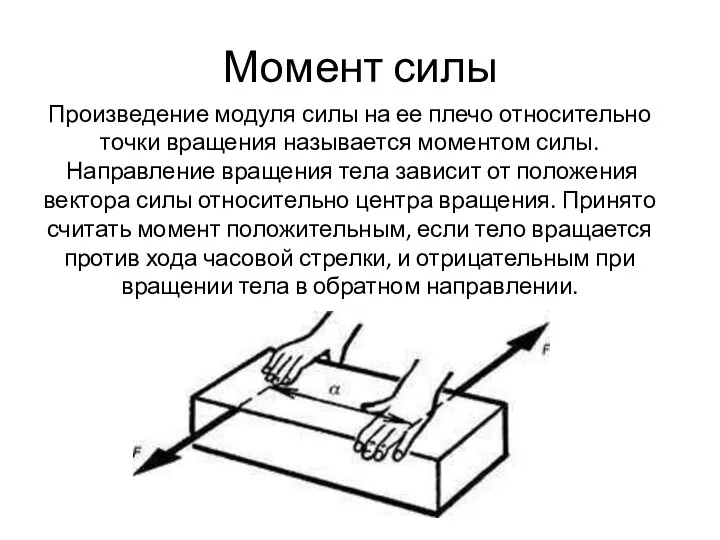
- 25. В природе и технике довольно часто можно наблюдать вращательное действие сил. Такое действие выполняется, например, при
- 26. Произведение модуля силы на ее плечо относительно точки вращения называется моментом силы. Направление вращения тела зависит
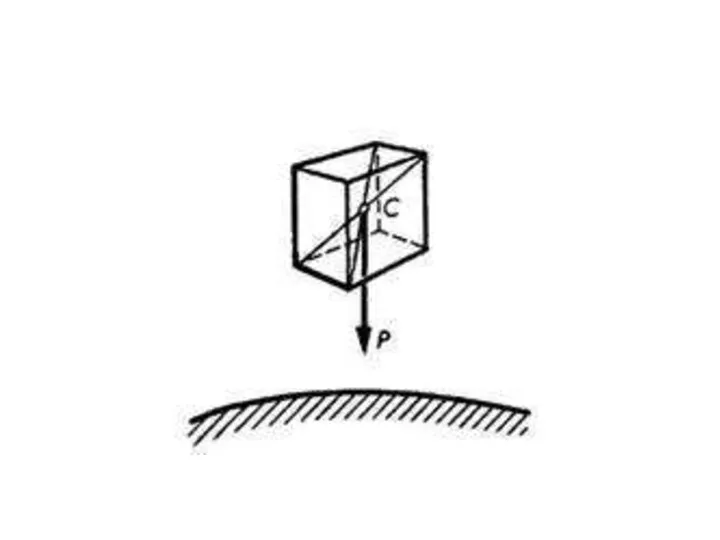
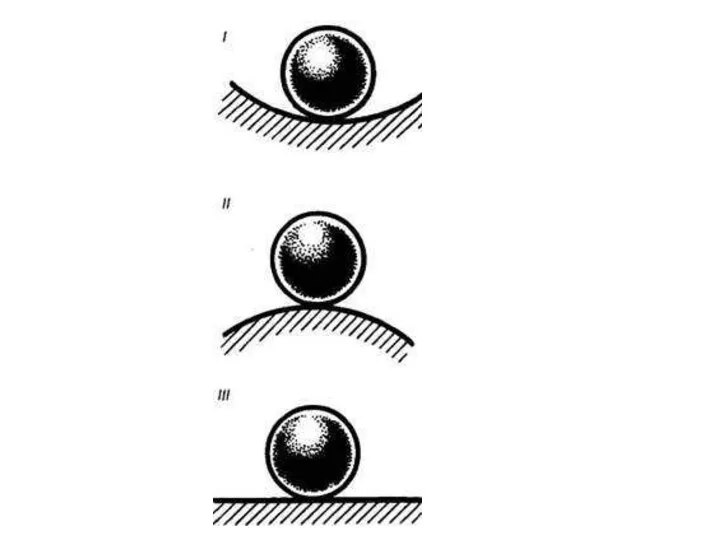
- 27. Центр тяжести Силы тяжести частиц при всех положениях тела направлены параллельно вниз, их векторы всегда остаются
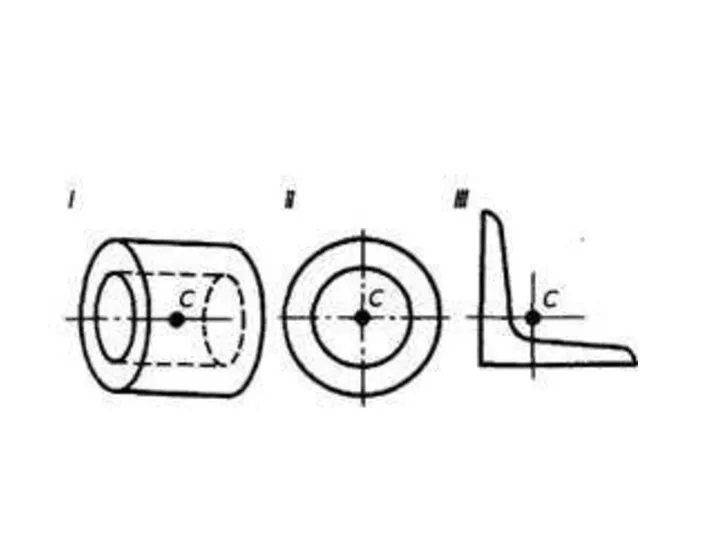
- 31. Для тел вращения (цилиндр, конус, шар) можно провести бесчисленное множество плоскостей симметрии, которые при пересечении образуют
- 34. Скачать презентацию
Механика
Наука о механическом движении материальных тел и происходящих при этом взаимодействиях
Механика
Наука о механическом движении материальных тел и происходящих при этом взаимодействиях
Техническая механика — это наука об общих законах механического движения и
Техническая механика — это наука об общих законах механического движения и
1) Материальная точка
объект пренебрежимо малых размеров, имеющий массу; это понятие
1) Материальная точка
объект пренебрежимо малых размеров, имеющий массу; это понятие
2) Абсолютно твёрдое тело
тело, расстояние между двумя любыми точками которого
2) Абсолютно твёрдое тело
тело, расстояние между двумя любыми точками которого
3) Сплошная изменяемая среда
это понятие применимо, когда при изучении движения изменяемой
3) Сплошная изменяемая среда
это понятие применимо, когда при изучении движения изменяемой
Механическое воздействие
Взаимодействие материальных тел, в результате которого происходит изменение взаимного положения
Механическое воздействие
Взаимодействие материальных тел, в результате которого происходит изменение взаимного положения
Свободное тело
тела, которые не соприкасаются ни с каким другим твердым телом
Свободное тело
тела, которые не соприкасаются ни с каким другим твердым телом
Несвободное тело
соприкасается с другими телами и движется в определенном направлении.
Твердые
Несвободное тело
соприкасается с другими телами и движется в определенном направлении.
Твердые
Предмет изучения механики-
деформация тел и количественная их оценка
Следствия модели абсолютно твёрдого
Предмет изучения механики-
деформация тел и количественная их оценка
Следствия модели абсолютно твёрдого
Основные понятия
Сила – мера механического взаимодействия. Сила моделируется вектором, характеризуемым направлением
Основные понятия
Сила – мера механического взаимодействия. Сила моделируется вектором, характеризуемым направлением
Статика
Статика — это раздел, изучающей равновесие тел под действием сил.
Равновесием
Статика
Статика — это раздел, изучающей равновесие тел под действием сил.
Равновесием
Основной мерой механического взаимодействия материальных тел является Сила
Это действие вызывает изменение
Основной мерой механического взаимодействия материальных тел является Сила
Это действие вызывает изменение
Сила и ее векторное изображение
силой называют всякое воздействие, изменяющее скорость или
Сила и ее векторное изображение
силой называют всякое воздействие, изменяющее скорость или
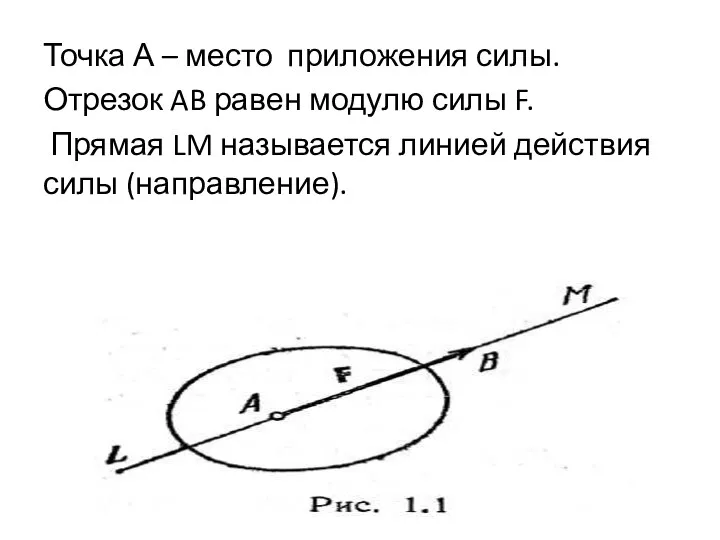
Точка А – место приложения силы.
Отрезок AB равен модулю силы F.
Точка А – место приложения силы.
Отрезок AB равен модулю силы F.
В зависимости от условий взаимодействия тел возникают различные силы.
К примеру,
при
В зависимости от условий взаимодействия тел возникают различные силы.
К примеру,
при
Система сил
Совокупность нескольких сил (F1, F2, ... ,Fn) называется системой сил.
Система сил
Совокупность нескольких сил (F1, F2, ... ,Fn) называется системой сил.
Когда система сил ( F 1 , F 2 , ...
Когда система сил ( F 1 , F 2 , ...
Пара сил
Равные противоположно направленные параллельные силы представляют собой пару сил.
Она действует
Пара сил
Равные противоположно направленные параллельные силы представляют собой пару сил.
Она действует
Реакции связей во всех случаях имеют вполне определенное направление. Для его
Реакции связей во всех случаях имеют вполне определенное направление. Для его
В природе и технике довольно часто можно наблюдать вращательное действие сил.
В природе и технике довольно часто можно наблюдать вращательное действие сил.
Произведение модуля силы на ее плечо относительно точки вращения называется моментом
Произведение модуля силы на ее плечо относительно точки вращения называется моментом
Центр тяжести
Силы тяжести частиц при всех положениях тела направлены параллельно вниз,
Центр тяжести
Силы тяжести частиц при всех положениях тела направлены параллельно вниз,

Для тел вращения (цилиндр, конус, шар) можно провести бесчисленное множество плоскостей
Для тел вращения (цилиндр, конус, шар) можно провести бесчисленное множество плоскостей
 Специальные вопросы электроснабжения. Изоляция и перенапряжения
Специальные вопросы электроснабжения. Изоляция и перенапряжения Создание источника электричества из овощей и фруктов
Создание источника электричества из овощей и фруктов Вечный двигатель
Вечный двигатель Презентация учебного проекта Учимся находить плотность вещества
Презентация учебного проекта Учимся находить плотность вещества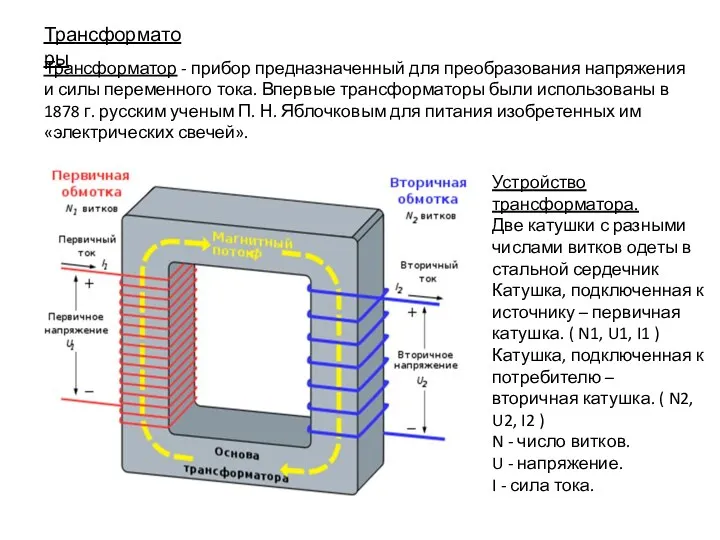 Трансформаторы
Трансформаторы Фрезерование. Лекция №24
Фрезерование. Лекция №24 Тепломассообмен. Поперечное обтекание одиночных труб и трубных пучков
Тепломассообмен. Поперечное обтекание одиночных труб и трубных пучков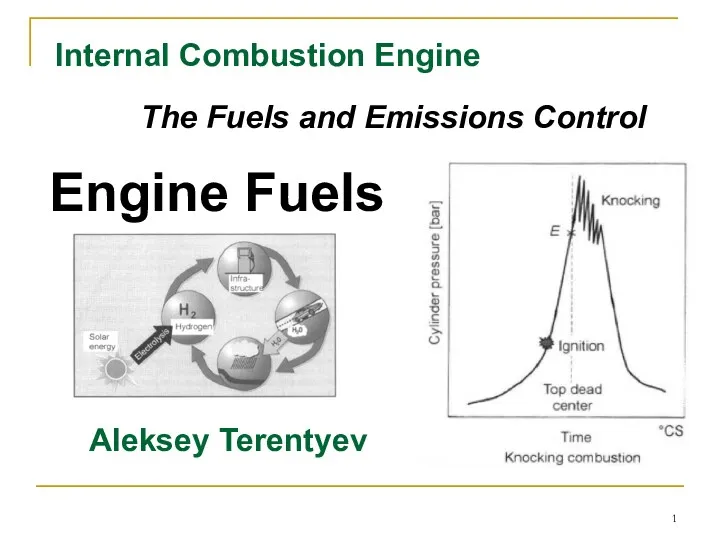 Internal сombustion engine. The fuels and emissions control. Engine fuels
Internal сombustion engine. The fuels and emissions control. Engine fuels Компрессор КТ-6
Компрессор КТ-6 Разработка рекомендаций по снижению величины основного сопротивления движения автосамосвала и увеличения сцепления с дорогой
Разработка рекомендаций по снижению величины основного сопротивления движения автосамосвала и увеличения сцепления с дорогой Ограничители перенапряжения
Ограничители перенапряжения Механические колебания
Механические колебания Законы сохранения в механике
Законы сохранения в механике Механические колебания. 11 класс
Механические колебания. 11 класс Adaptive response of metal-oxide memristive nanostructures to periodic electric stimulation
Adaptive response of metal-oxide memristive nanostructures to periodic electric stimulation ультразвук презинтация
ультразвук презинтация СЭС (Солнечная электростанция)
СЭС (Солнечная электростанция) Дизельна електростанція
Дизельна електростанція Линзы. Типы линз. Изображение в тонких линзах
Линзы. Типы линз. Изображение в тонких линзах Действие магнитного поля на движущуюся заряженную частицу. Сила Лоренца
Действие магнитного поля на движущуюся заряженную частицу. Сила Лоренца Курс Атомные реакторы и ядерная энергетика. Лекция 3. Ядерная энергетика. Настоящее и будущее
Курс Атомные реакторы и ядерная энергетика. Лекция 3. Ядерная энергетика. Настоящее и будущее Сила тока. Амперметр
Сила тока. Амперметр Урок 51 Паралельне з’єднання провідників
Урок 51 Паралельне з’єднання провідників Работа и мощность
Работа и мощность Устойчивость. Показатели поперечной устойчивости
Устойчивость. Показатели поперечной устойчивости Устами младенца. Игра для 7 класса по физике
Устами младенца. Игра для 7 класса по физике Дифракция света
Дифракция света Презентация к уроку в 10 классе по теме Сила упругости и сила трения
Презентация к уроку в 10 классе по теме Сила упругости и сила трения