- Теория автоматического управления

Содержание
- 2. 07/29/2023 Леонов Сергей Леонидович Дисциплина базируется на изучении курсов: Высшая математика Математическое моделирование технологических систем Основы
- 3. 07/29/2023 Леонов Сергей Леонидович 1. Элементы теории автоматического управления (ТАУ) 1.1. Понятия автоматического управления и автоматического
- 4. 07/29/2023 Леонов Сергей Леонидович Задача автоматического управления Найти такое х(τ), чтобы достичь цели управления: min(F1{y(τ),x(τ)}) при
- 5. 07/29/2023 Леонов Сергей Леонидович Задача автоматического регулирования Разработать техническое устройство, реализующее систему для решения задачи автоматического
- 6. 07/29/2023 Леонов Сергей Леонидович Структурные схемы САР Элемент или подсистема 2. Суммирующий узел Связь между элементами
- 7. 07/29/2023 Леонов Сергей Леонидович 1.2. Состав и структура САР Состав: Объект регулирования Датчик Автоматический регулятор Структура:
- 8. 07/29/2023 Леонов Сергей Леонидович Регулирование по отклонению АР ОР Д ε x y Регулирование по возмущению
- 9. 07/29/2023 Леонов Сергей Леонидович 1.3. Классификация САР Работающие по замкнутому циклу Системы стабилизации Следящие системы 2.
- 10. 07/29/2023 Леонов Сергей Леонидович Система стабилизации силы резания Усилитель Двигатель Механизм подачи Технологич. система Датчик силы
- 11. 07/29/2023 Леонов Сергей Леонидович Система компенсации биения обрабатываемой поверхности Преобразо- ватель Двигатель Привод шпинделя Редуктор
- 12. 07/29/2023 Леонов Сергей Леонидович СПУ круглошлифовального станка модели 3Е153 Программа- тор Конечные переключа- тели Приводы Механизм
- 13. 07/29/2023 Леонов Сергей Леонидович Адаптивная система обработки ЭВМ Приводы Технологическая система Датчики Исходные данные Показатели качества
- 14. 07/29/2023 Леонов Сергей Леонидович 1.4. Математическое описание САР Любую непрерывную систему можно описать уравнением: F(x(k), x(k-1),…,x’,x,
- 15. 07/29/2023 Леонов Сергей Леонидович Передаточная функция линейной системы Система описывается дифференциальным уравнением: any(n)+…+a1y’+a0y = bkx(k)+…+b1x’+b0x Формально
- 16. 07/29/2023 Леонов Сергей Леонидович Передаточная функция линейной системы Определение: Передаточной функцией линейной системы называется отношение лапласова
- 17. 07/29/2023 Леонов Сергей Леонидович Коэффициент передачи системы Если входной сигнал x(τ)=const=x0, то с течением времени выходной
- 18. 07/29/2023 Леонов Сергей Леонидович Коэффициент передачи системы Коэффициент передачи характеризует статические свойства системы, т.е. ее свойства
- 19. 07/29/2023 Леонов Сергей Леонидович 1.5. Преобразование структурных схем Задано математическое описание (передаточные функции) звеньев (составных элементов)
- 20. 07/29/2023 Леонов Сергей Леонидович Преобразование структурных схем 2. Параллельное согласное соединение звеньев: W1 W2 W3 x
- 21. 07/29/2023 Леонов Сергей Леонидович Преобразование структурных схем 3. Параллельное встречное соединение звеньев: W1 W2 x y
- 22. 07/29/2023 Леонов Сергей Леонидович Преобразование структурных схем Примеры: 1. 2. - 3. -
- 23. 07/29/2023 Леонов Сергей Леонидович 1.6.Временные характеристики систем Если на вход системы подать единичное ступенчатое воздействие ,
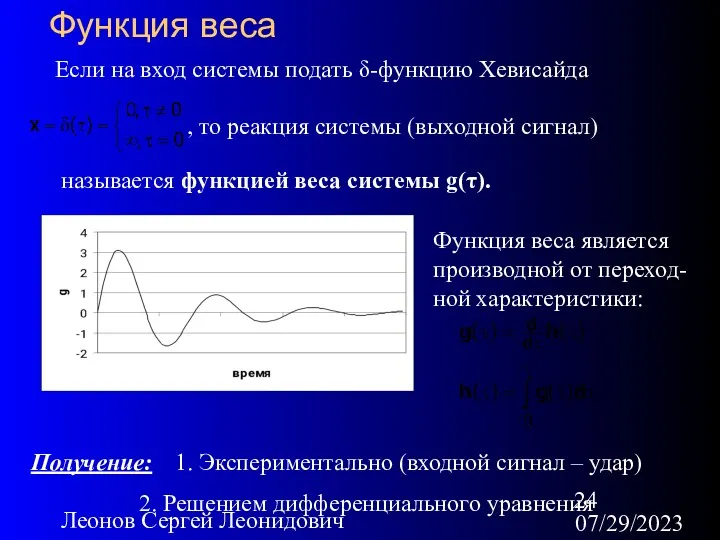
- 24. 07/29/2023 Леонов Сергей Леонидович Функция веса Если на вход системы подать δ-функцию Хевисайда , то реакция
- 25. 07/29/2023 Леонов Сергей Леонидович Временные характеристики систем Временные характеристики h(τ) и g(τ) наиболее полно отражают динамические
- 26. 07/29/2023 Леонов Сергей Леонидович Параметры качества на переходной характеристике k ±5% от k tп Коэффициент передачи
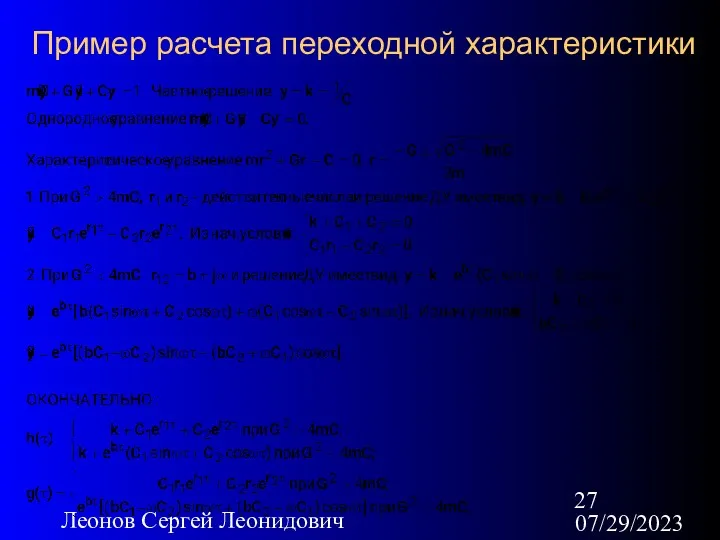
- 27. 07/29/2023 Леонов Сергей Леонидович Пример расчета переходной характеристики
- 28. 07/29/2023 Леонов Сергей Леонидович 1.7.Частотные характеристики систем Если на вход системы подать гармонический сигнал x =
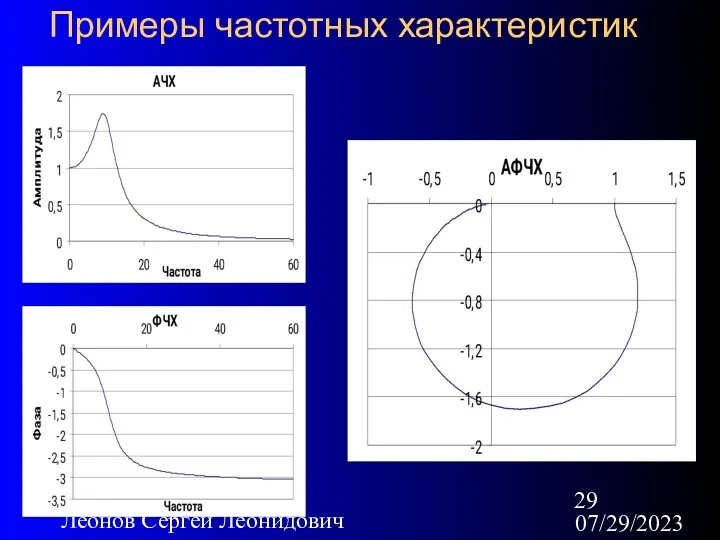
- 29. 07/29/2023 Леонов Сергей Леонидович Примеры частотных характеристик
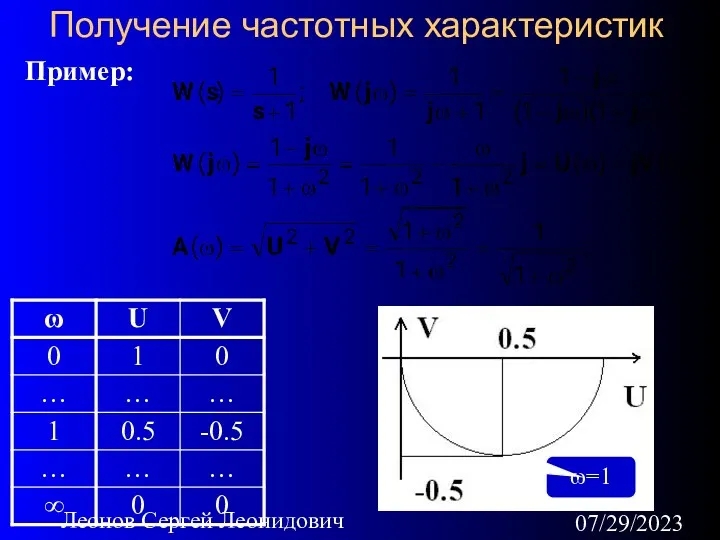
- 30. 07/29/2023 Леонов Сергей Леонидович Получение частотных характеристик Из передаточной функции системы Заменим в передаточной функции W(s)
- 31. 07/29/2023 Леонов Сергей Леонидович Получение частотных характеристик Пример: ω=1
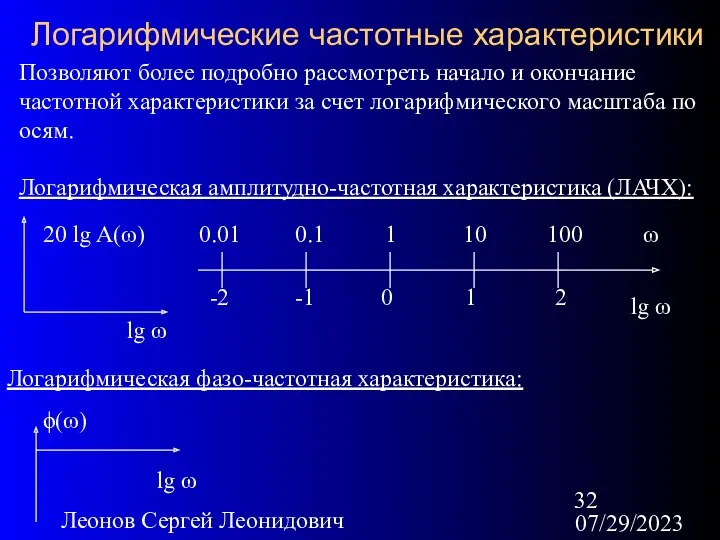
- 32. 07/29/2023 Леонов Сергей Леонидович Логарифмические частотные характеристики Позволяют более подробно рассмотреть начало и окончание частотной характеристики
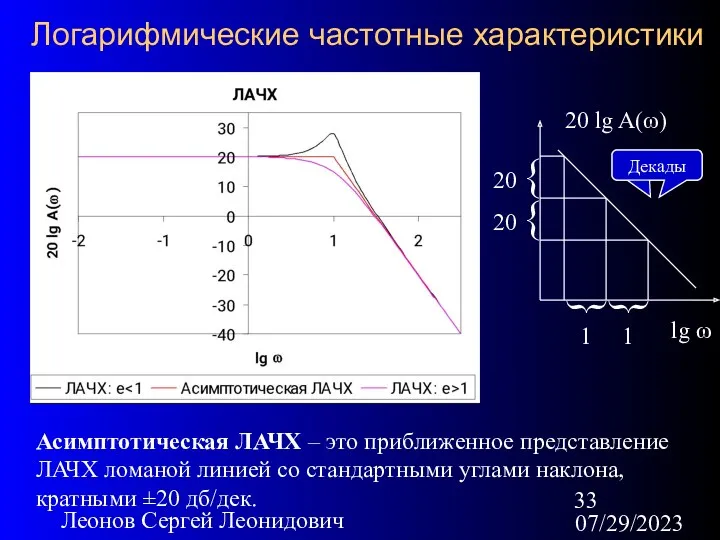
- 33. 07/29/2023 Леонов Сергей Леонидович Логарифмические частотные характеристики Асимптотическая ЛАЧХ – это приближенное представление ЛАЧХ ломаной линией
- 34. 07/29/2023 Леонов Сергей Леонидович 1.8. Типовые звенья САР 1. Усилительное звено Уравнение: y = k x;
- 35. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР 2. Апериодическое звено первого порядка: Уравнение: Передаточная функция: Примеры:
- 36. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Апериодическое звено первого порядка (продолжение): k/2 -k/2 k ω=1/T
- 37. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Апериодическое звено первого порядка (продолжение): 20 lg k -20
- 38. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР 3. Интегрирующее звено: Уравнение: Передаточная функция: Переходная характеристика h(τ)
- 39. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Интегрирующее звено (продолжение) АЧХ ЛАЧХ A ω L lg
- 40. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР 4. Звенья второго порядка: Уравнение: Передаточная функция: При 0
- 41. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Звенья второго порядка (продолжение): При 0 max на АЧХ
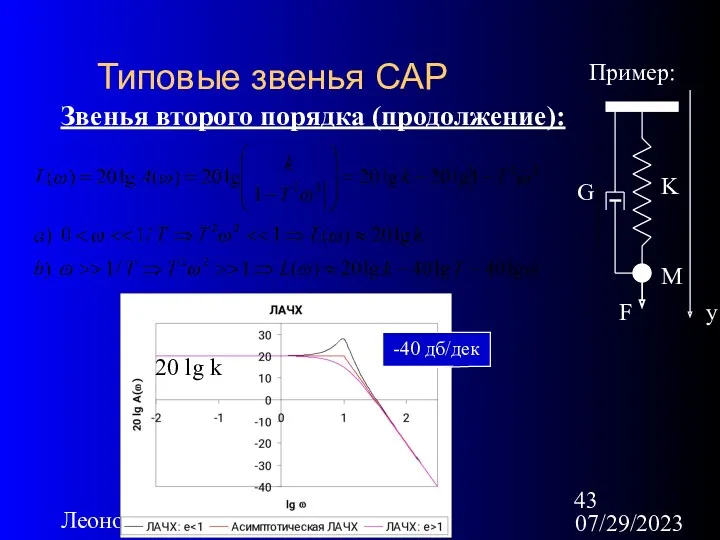
- 42. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Звенья второго порядка (продолжение): 3. При e=0 – консервативное
- 43. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Звенья второго порядка (продолжение): Пример: F y M G
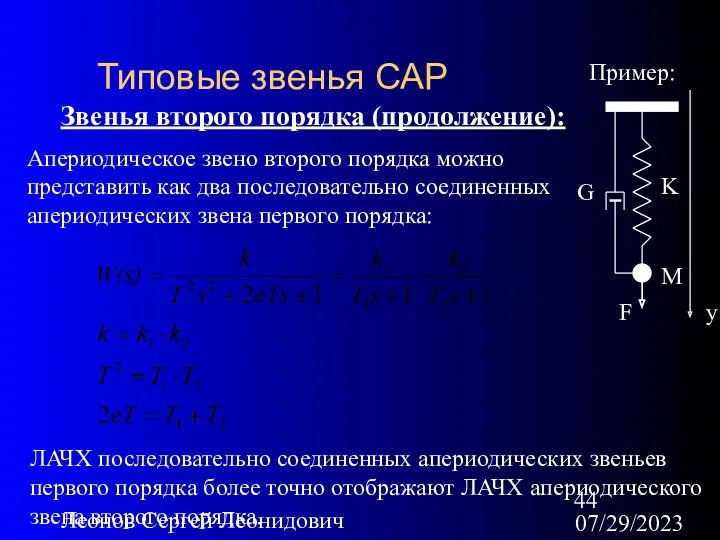
- 44. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Звенья второго порядка (продолжение): Пример: F y M G
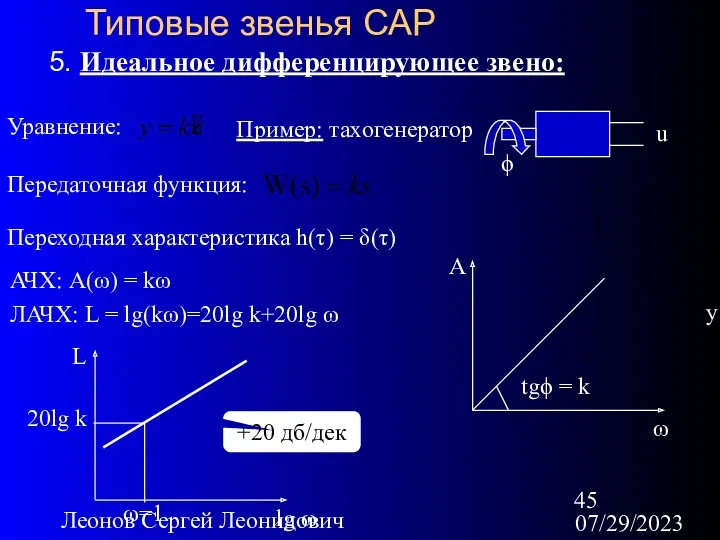
- 45. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР 5. Идеальное дифференцирующее звено: Уравнение: Передаточная функция: Переходная характеристика
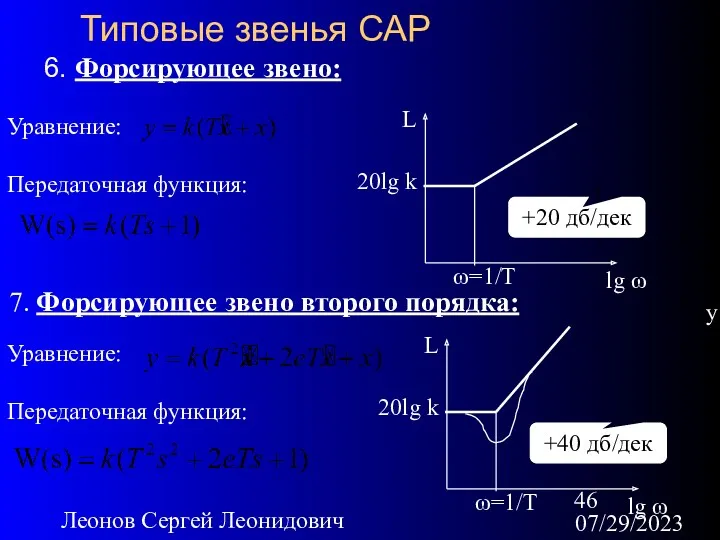
- 46. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР 6. Форсирующее звено: Уравнение: Передаточная функция: y 7. Форсирующее
- 47. 07/29/2023 Леонов Сергей Леонидович Типовые звенья САР Сводная таблица: 20 lg k -20 дб/дек -40 дб/дек
- 48. 07/29/2023 Леонов Сергей Леонидович 1.9. Построение асимптотических ЛАЧХ L lg ω ω1= 1/T1 ω2=1/T2 Интегрирующее звено
- 49. 07/29/2023 Леонов Сергей Леонидович 1.9. Построение асимптотических ЛАЧХ L lg ω ω1= 1/T1 ω2=1/T2 Интегрирующее звено
- 50. 07/29/2023 Леонов Сергей Леонидович 1.9. Построение асимптотических ЛАЧХ L lg ω ω1= 1/T1 ω2=1/T2 Интегрирующее звено
- 51. 07/29/2023 Леонов Сергей Леонидович 1.9. Построение асимптотических ЛАЧХ L lg ω ω1= 1/T1 ω2=1/T2 -20 Суммарная
- 52. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω2 ω1 -20 Интегрирующее звено
- 53. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω2 ω1 -20 Интегрирующее звено +20
- 54. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω2 ω1 -20 Интегрирующее звено +20
- 55. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω2 ω1 Суммарная ЛАЧХ -20 +20
- 56. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω1 ω2 Усилительное звено 0
- 57. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω1 ω2 Усилительное звено 0 +20
- 58. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω1 ω2 Усилительное звено 0 +20
- 59. 07/29/2023 Леонов Сергей Леонидович Построение асимптотических ЛАЧХ L lg ω ω1 ω2 Суммарная ЛАЧХ 0 +20
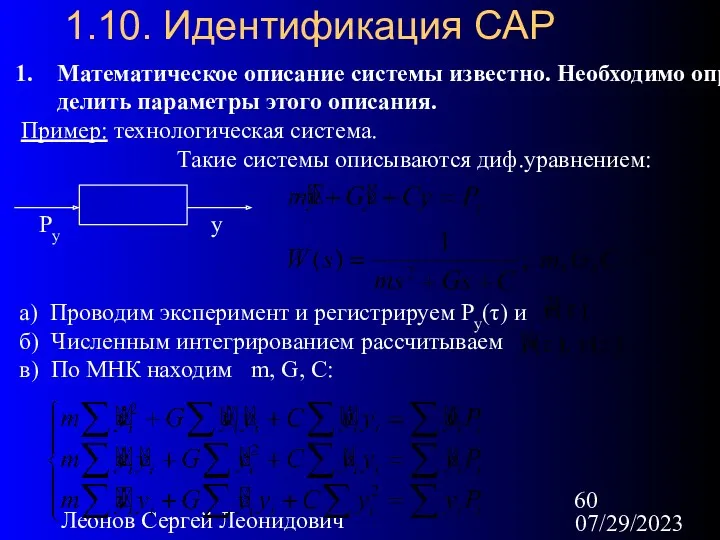
- 60. 07/29/2023 Леонов Сергей Леонидович 1.10. Идентификация САР Математическое описание системы известно. Необходимо опре- делить параметры этого
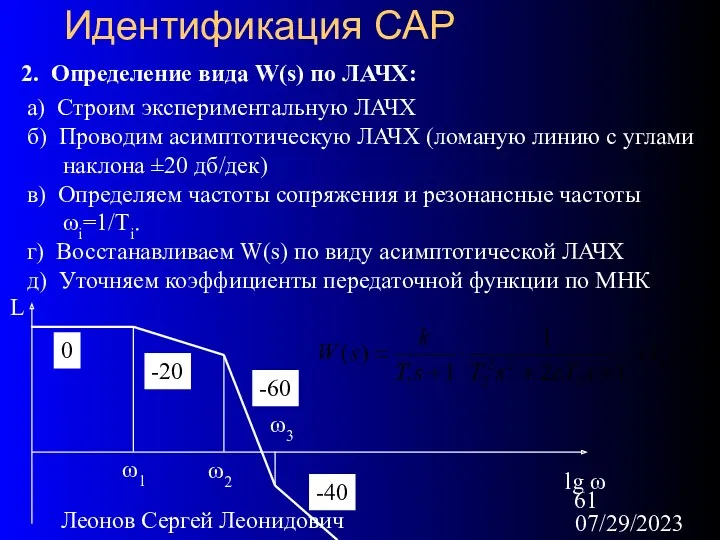
- 61. 07/29/2023 Леонов Сергей Леонидович Идентификация САР 2. Определение вида W(s) по ЛАЧХ: а) Строим экспериментальную ЛАЧХ
- 62. 07/29/2023 Леонов Сергей Леонидович Идентификация САР Проблемы построения W(s): Сложность подачи гармонического сигнала на вход системы
- 63. 07/29/2023 Леонов Сергей Леонидович Идентификация САР Экспресс-методика идентификации операции ТП: Создаем заготовку в виде шлицевого валика.
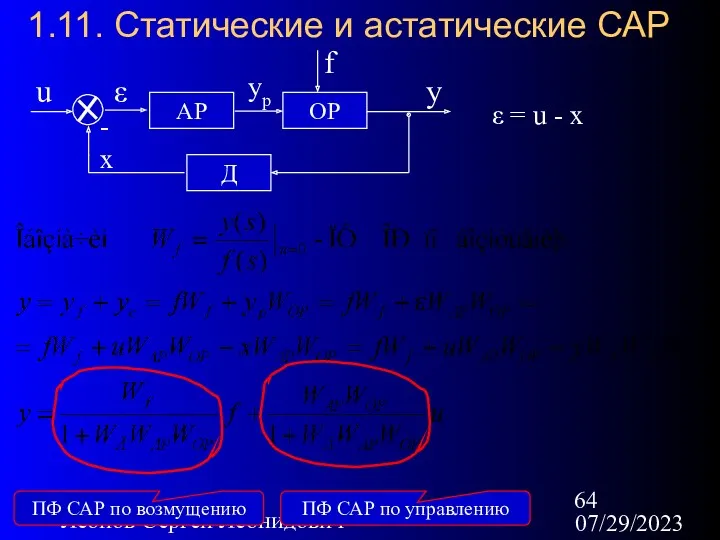
- 64. 07/29/2023 Леонов Сергей Леонидович 1.11. Статические и астатические САР - x yp ε = u -
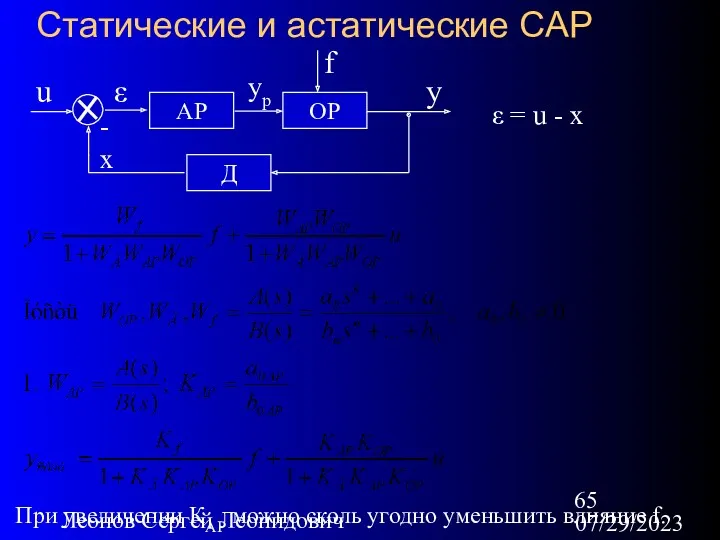
- 65. 07/29/2023 Леонов Сергей Леонидович Статические и астатические САР - x yp ε = u - x
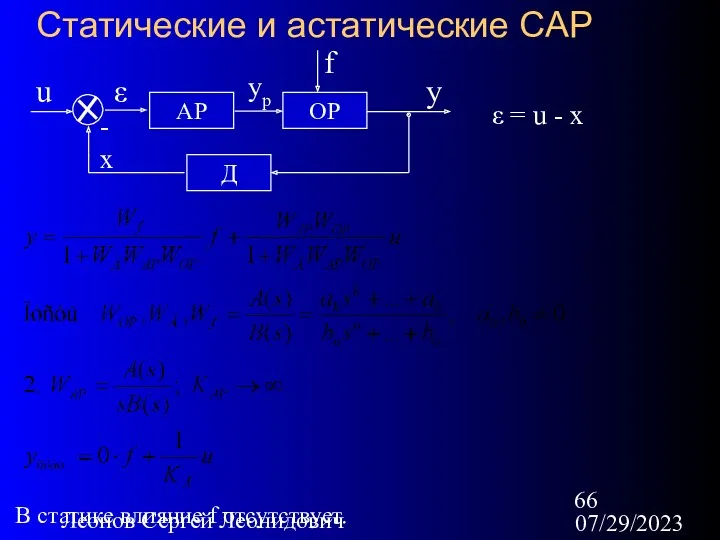
- 66. 07/29/2023 Леонов Сергей Леонидович Статические и астатические САР - x yp ε = u - x
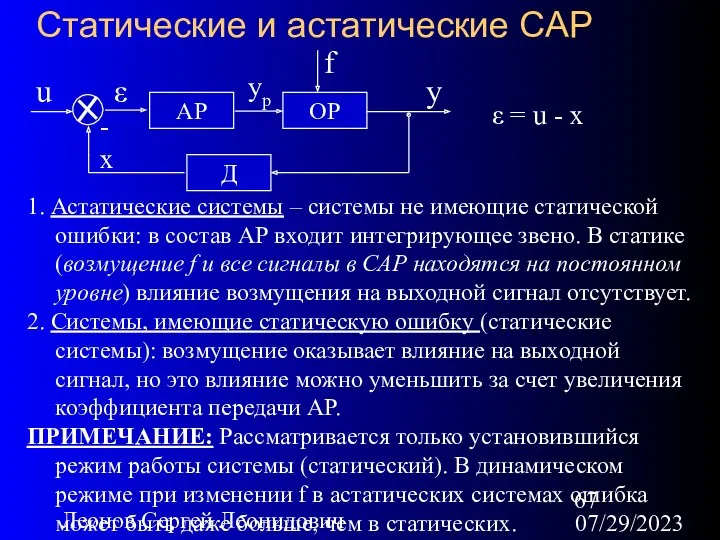
- 67. 07/29/2023 Леонов Сергей Леонидович Статические и астатические САР - x yp ε = u - x
- 68. 07/29/2023 Леонов Сергей Леонидович Статические и астатические САР - примеры Стабилизация скорости вращения электродвигателя 1. Система
- 69. 07/29/2023 Леонов Сергей Леонидович Статические и астатические САР - примеры Частота вращения ω не зависит от
- 70. 07/29/2023 Леонов Сергей Леонидович 1.12. Устойчивость линейных САР Понятие устойчивости: Если при ступенчатом входном воздействии или
- 71. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Необходимое и достаточное условие устойчивости: Система описывается передаточной функцией:
- 72. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Необходимое и достаточное условие устойчивости: Примеры: 1) Re Im
- 73. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Необходимое условие устойчивости: (не является достаточным) Для устойчивости системы
- 74. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Критерий Рауса-Гурвица (необходимый и достаточный): Знаменатель передаточной функции: Q(s)=b0sn+b1sn-1+…+bn
- 75. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Критерий Рауса-Гурвица Примеры: 1) Система неустойчива по необходимому условию.
- 76. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Критерий Рауса-Гурвица Сведение к более простым условиям: 1) Система
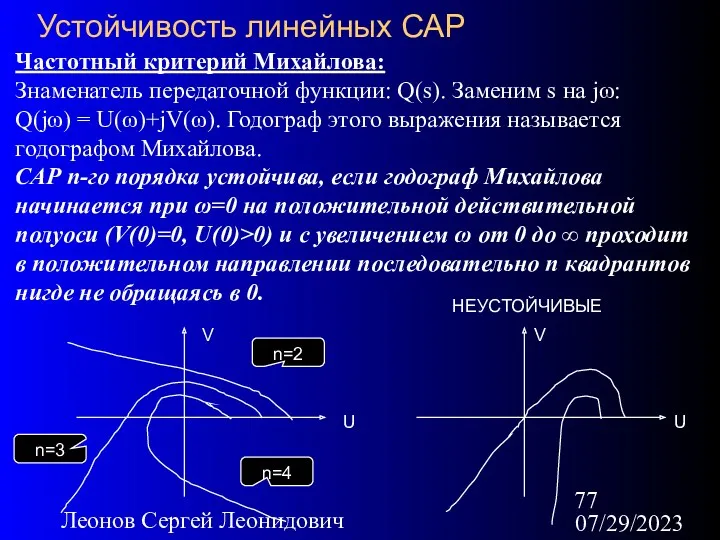
- 77. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Частотный критерий Михайлова: Знаменатель передаточной функции: Q(s). Заменим s
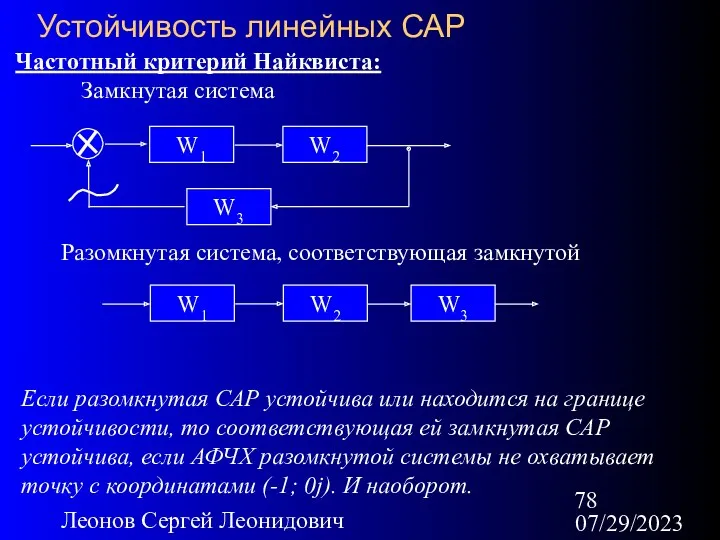
- 78. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Частотный критерий Найквиста: Замкнутая система W1 W2 W3 W1
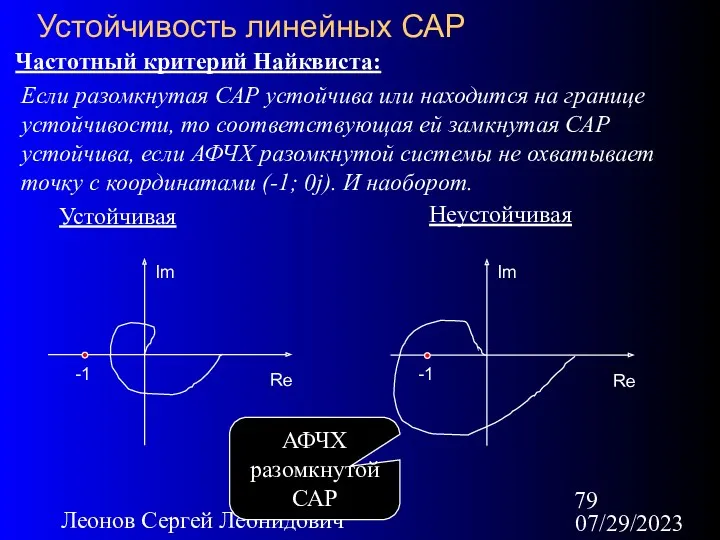
- 79. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Частотный критерий Найквиста: Если разомкнутая САР устойчива или находится
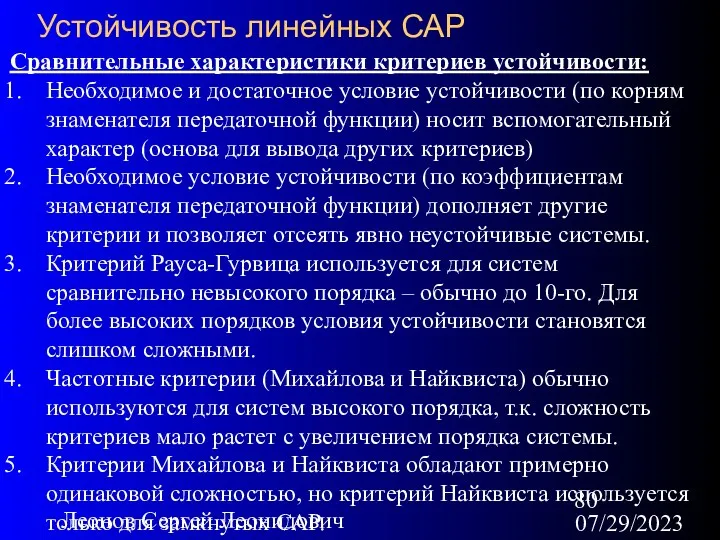
- 80. 07/29/2023 Леонов Сергей Леонидович Устойчивость линейных САР Сравнительные характеристики критериев устойчивости: Необходимое и достаточное условие устойчивости
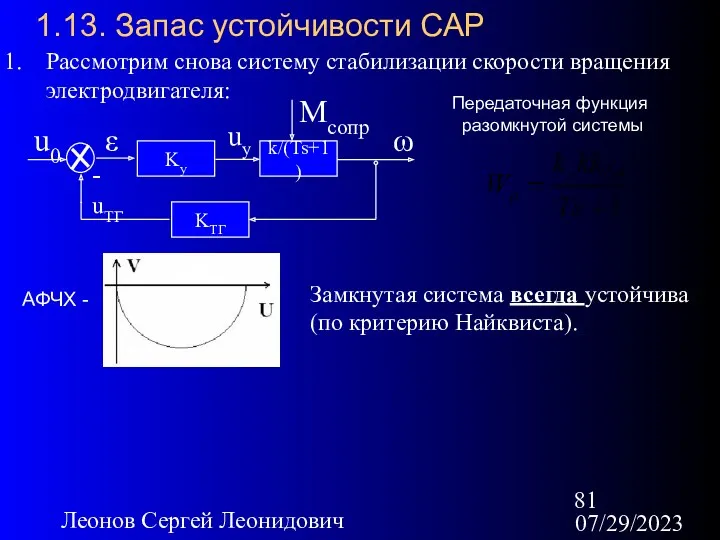
- 81. 07/29/2023 Леонов Сергей Леонидович 1.13. Запас устойчивости САР Рассмотрим снова систему стабилизации скорости вращения электродвигателя: Передаточная
- 82. 07/29/2023 Леонов Сергей Леонидович 1.13. Запас устойчивости САР 2. Рассмотрим систему стабилизации скорости вращения шпинделя станка
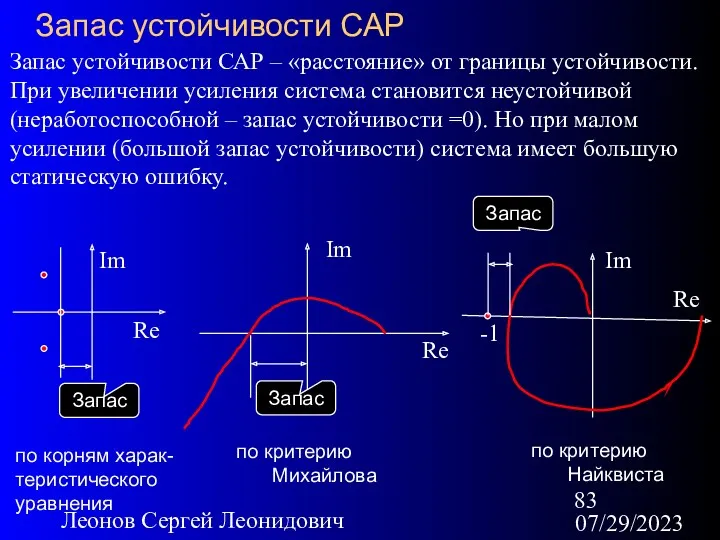
- 83. 07/29/2023 Леонов Сергей Леонидович Запас устойчивости САР Запас устойчивости САР – «расстояние» от границы устойчивости. При
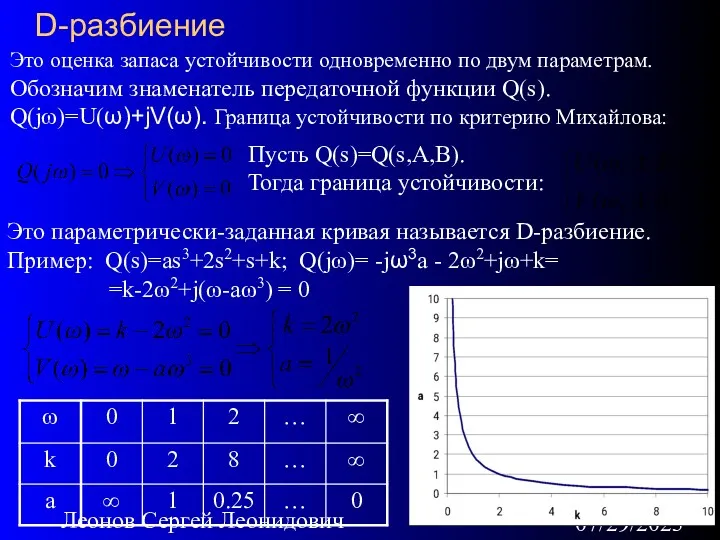
- 84. 07/29/2023 Леонов Сергей Леонидович D-разбиение Это оценка запаса устойчивости одновременно по двум параметрам. Обозначим знаменатель передаточной
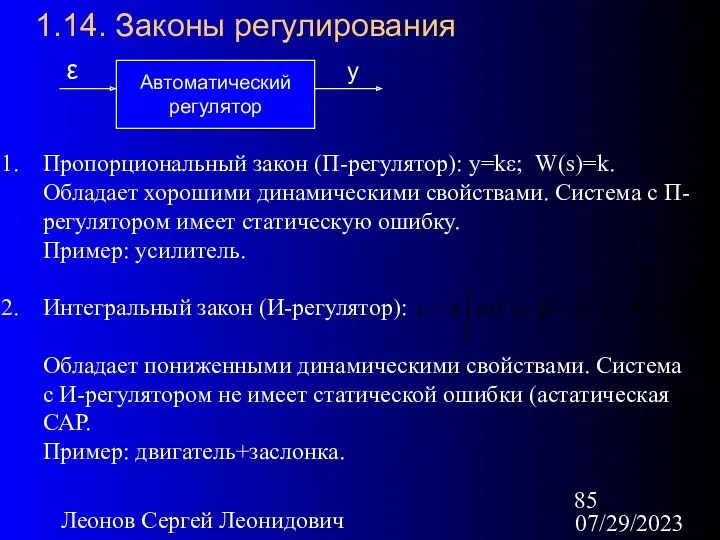
- 85. 07/29/2023 Леонов Сергей Леонидович 1.14. Законы регулирования Пропорциональный закон (П-регулятор): y=kε; W(s)=k. Обладает хорошими динамическими свойствами.
- 86. 07/29/2023 Леонов Сергей Леонидович 1.14. Законы регулирования Пропорционально-интегральный закон (ПИ-регулятор): Обладает хорошими динамическими свойствами. Система с
- 87. 07/29/2023 Леонов Сергей Леонидович 1.14. Законы регулирования 5. Пропорционально-интегрально-дифференциальный закон (ПИД-регулятор): Обладает очень хорошими динамическими свойствами.
- 88. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР Датчики сопротивления. а)контактные датчики б)потенциометрические k=E R/R0 (если не
- 89. 07/29/2023 Леонов Сергей Леонидович Датчики САР Примеры использования тензодатчиков: Измерение деформаций Профилографирование Измерение сил резания
- 90. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР Датчики сопротивления. г) термосопротивления. Применяются для измерения медленно изменяющейся
- 91. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР Использование фотосопротивлений: Измерение светового потока (пирометры) Определение степени прозрачности
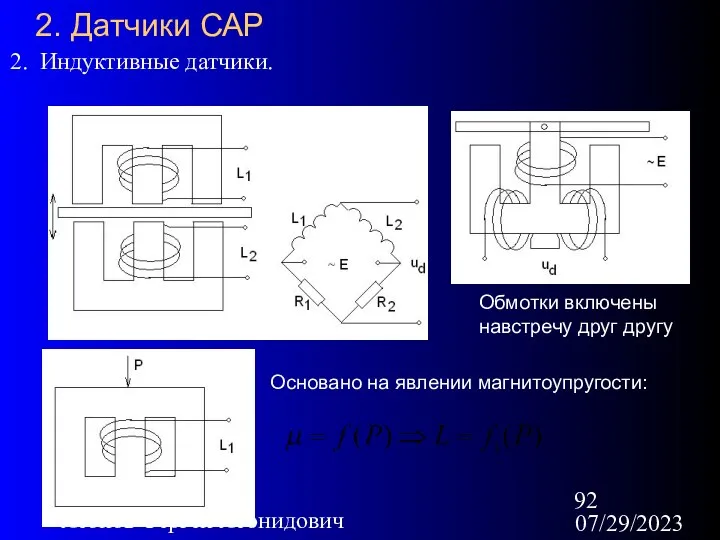
- 92. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 2. Индуктивные датчики. Обмотки включены навстречу друг другу Основано
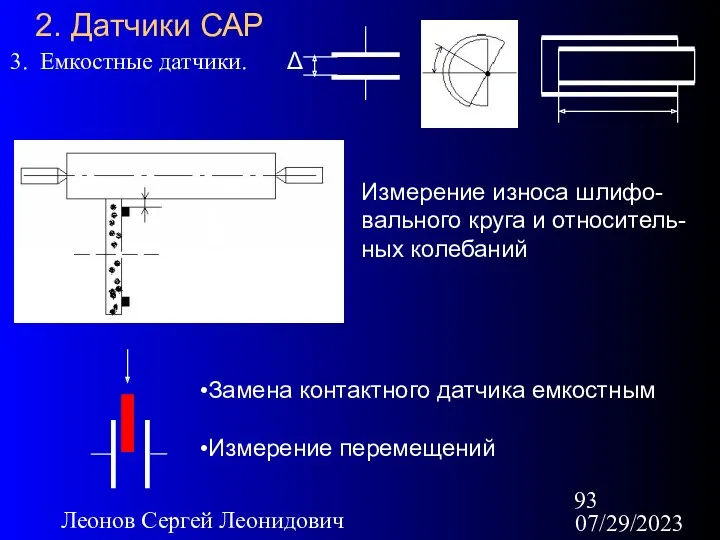
- 93. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 3. Емкостные датчики. Измерение износа шлифо-вального круга и относитель-ных
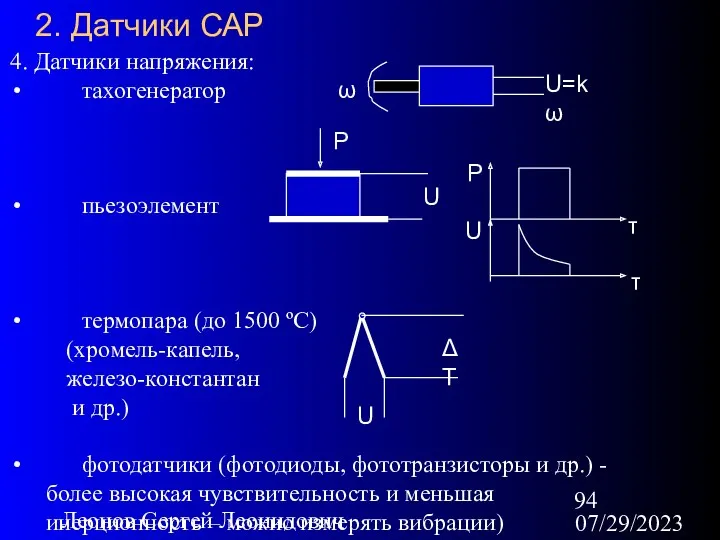
- 94. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 4. Датчики напряжения: тахогенератор пьезоэлемент термопара (до 1500 ºС)
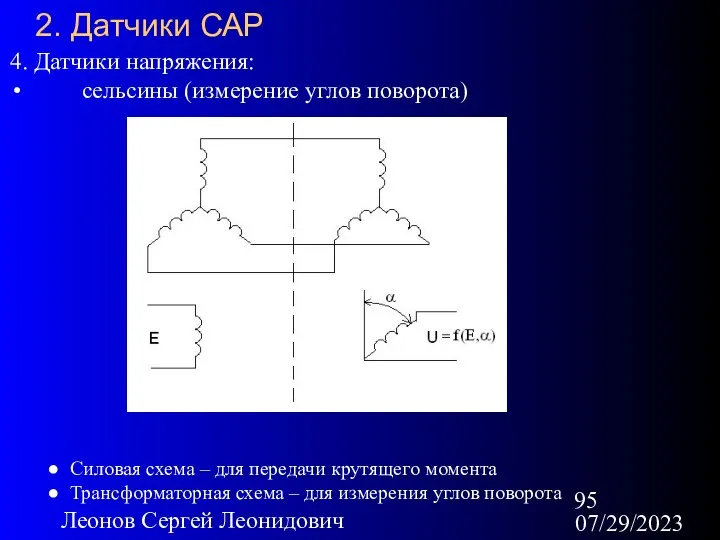
- 95. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 4. Датчики напряжения: сельсины (измерение углов поворота) Силовая схема
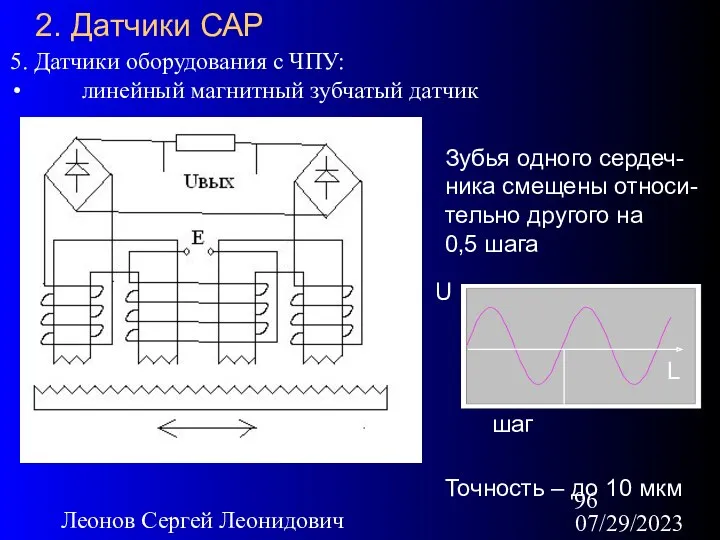
- 96. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 5. Датчики оборудования с ЧПУ: линейный магнитный зубчатый датчик
- 97. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 5. Датчики оборудования с ЧПУ: фотоэлектрический импульсный датчик Зубчатая
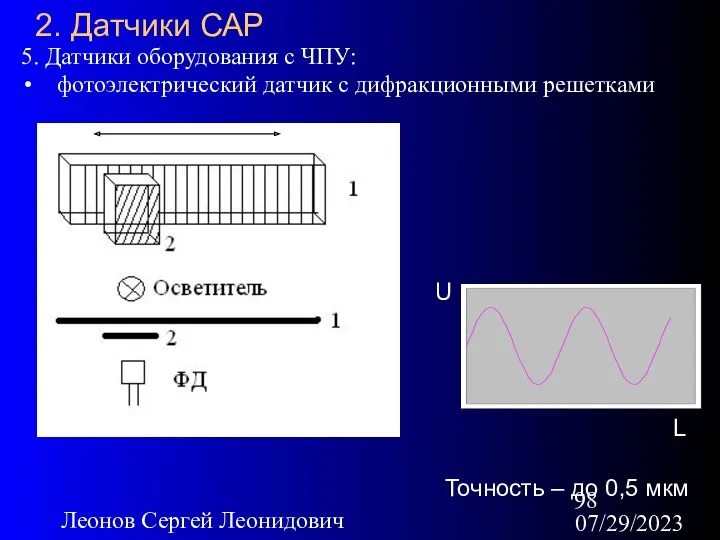
- 98. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 5. Датчики оборудования с ЧПУ: фотоэлектрический датчик c дифракционными
- 99. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 5. Датчики оборудования с ЧПУ: вращающиеся трансформаторы Статор Ротор
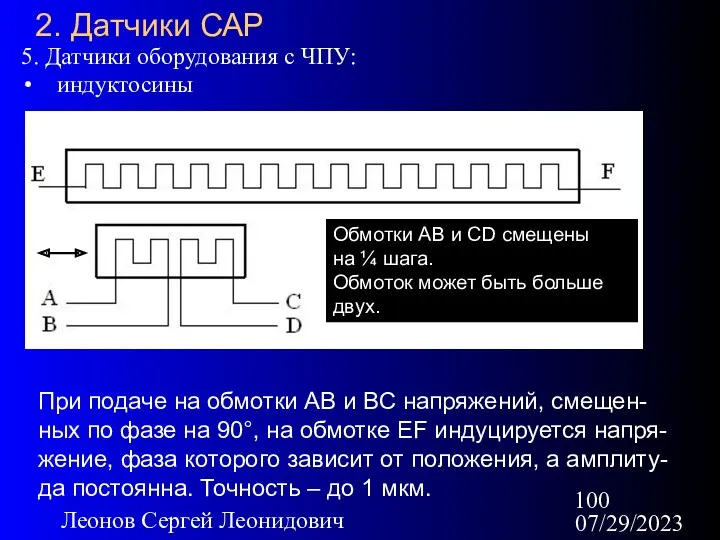
- 100. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 5. Датчики оборудования с ЧПУ: индуктосины Обмотки AB и
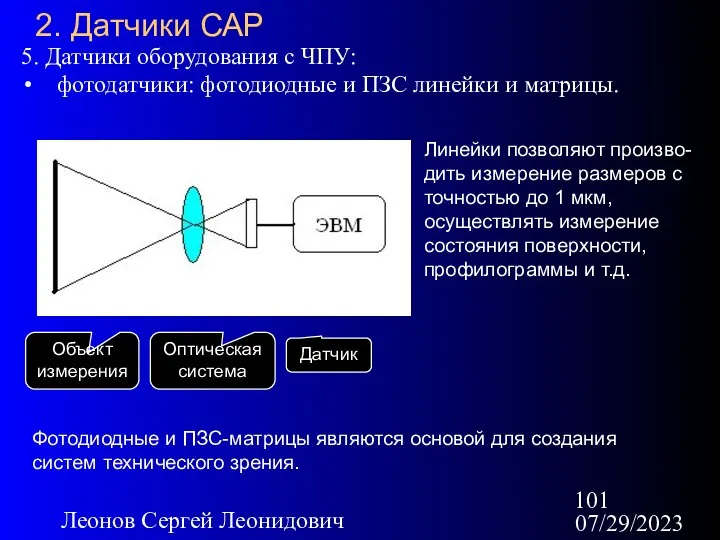
- 101. 07/29/2023 Леонов Сергей Леонидович 2. Датчики САР 5. Датчики оборудования с ЧПУ: фотодатчики: фотодиодные и ПЗС
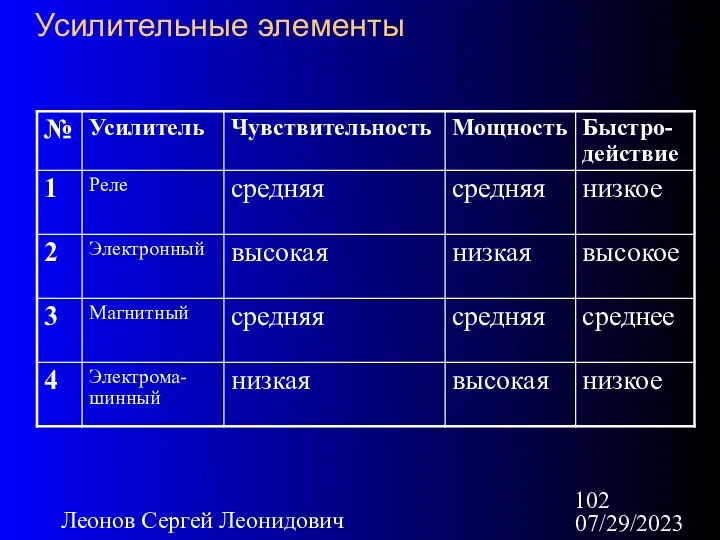
- 102. 07/29/2023 Леонов Сергей Леонидович Усилительные элементы
- 103. 07/29/2023 Леонов Сергей Леонидович Моделирование САР ЭЦВМ – для моделирования используются численные методы решения дифференциальных уравнений
- 104. 07/29/2023 Леонов Сергей Леонидович Моделирование САР Блоки АВМ: Сумматор Интегросумматор R1 R2 R0 U1 U2 R1
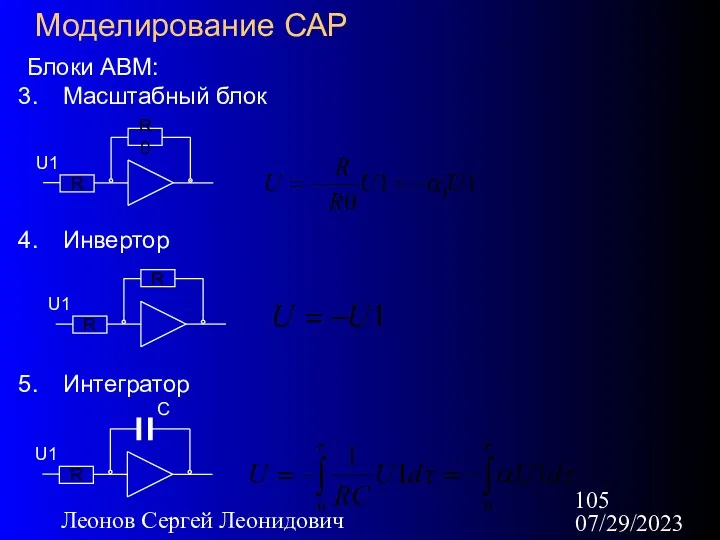
- 105. 07/29/2023 Леонов Сергей Леонидович Моделирование САР Блоки АВМ: Масштабный блок Инвертор Интегратор R R0 U1 R
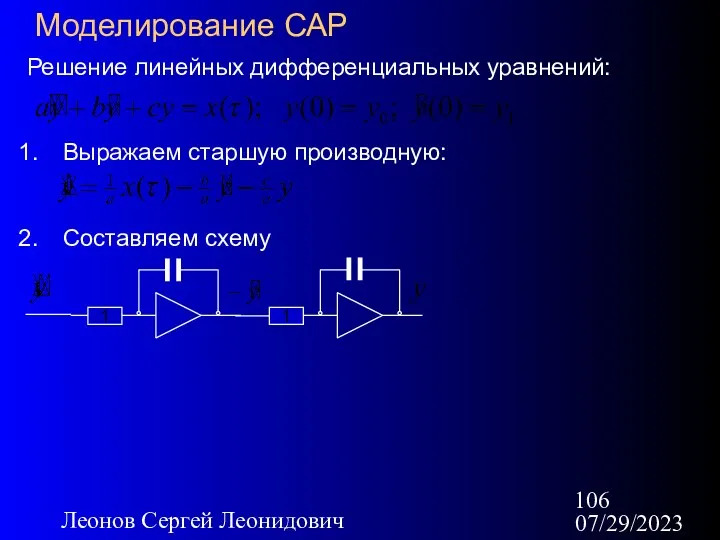
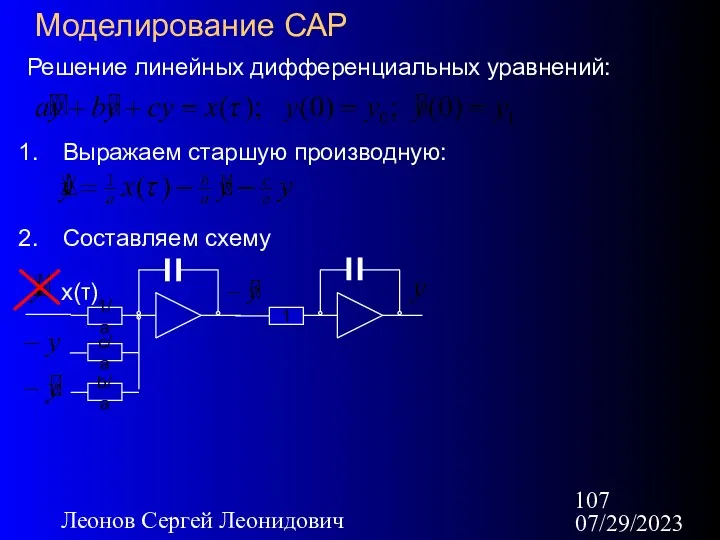
- 106. 07/29/2023 Леонов Сергей Леонидович Моделирование САР Решение линейных дифференциальных уравнений: Выражаем старшую производную: Составляем схему 1
- 107. 07/29/2023 Леонов Сергей Леонидович Моделирование САР Решение линейных дифференциальных уравнений: Выражаем старшую производную: Составляем схему 1/a
- 109. Скачать презентацию
07/29/2023
Леонов Сергей Леонидович
Дисциплина базируется на изучении курсов:
Высшая математика
Математическое моделирование технологических
07/29/2023
Леонов Сергей Леонидович
Дисциплина базируется на изучении курсов:
Высшая математика
Математическое моделирование технологических
07/29/2023
Леонов Сергей Леонидович
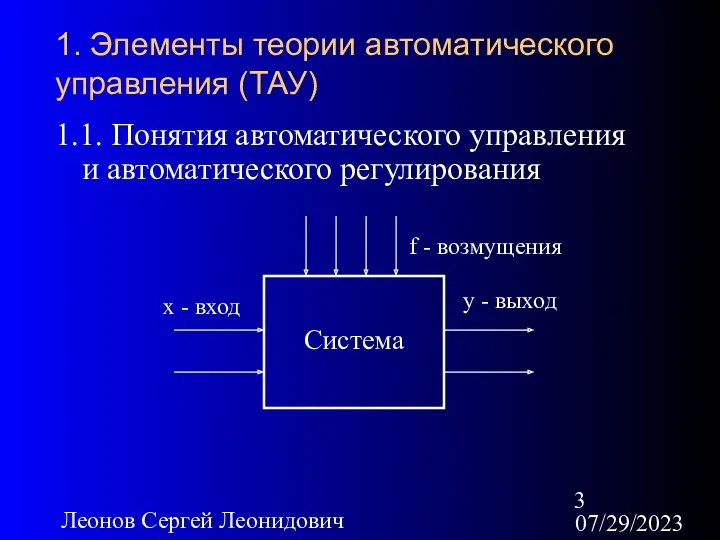
1. Элементы теории автоматического управления (ТАУ)
1.1. Понятия автоматического управления
07/29/2023
Леонов Сергей Леонидович
1. Элементы теории автоматического управления (ТАУ)
1.1. Понятия автоматического управления
07/29/2023
Леонов Сергей Леонидович
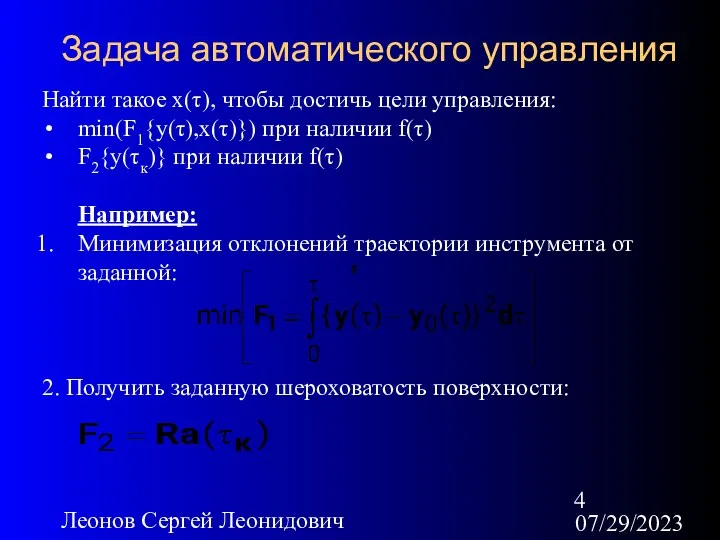
Задача автоматического управления
Найти такое х(τ), чтобы достичь цели управления:
min(F1{y(τ),x(τ)})
07/29/2023
Леонов Сергей Леонидович
Задача автоматического управления
Найти такое х(τ), чтобы достичь цели управления:
min(F1{y(τ),x(τ)})
07/29/2023
Леонов Сергей Леонидович
Задача автоматического регулирования
Разработать техническое устройство, реализующее
систему для решения
07/29/2023
Леонов Сергей Леонидович
Задача автоматического регулирования
Разработать техническое устройство, реализующее
систему для решения
07/29/2023
Леонов Сергей Леонидович
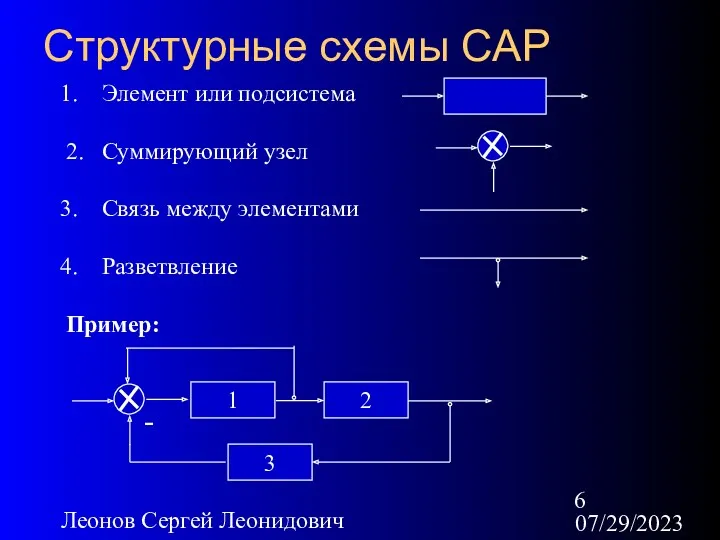
Структурные схемы САР
Элемент или подсистема
2. Суммирующий узел
Связь между элементами
Разветвление
Пример:
1
2
3
-
07/29/2023
Леонов Сергей Леонидович
Структурные схемы САР
Элемент или подсистема
2. Суммирующий узел
Связь между элементами
Разветвление
Пример:
1
2
3
-
07/29/2023
Леонов Сергей Леонидович
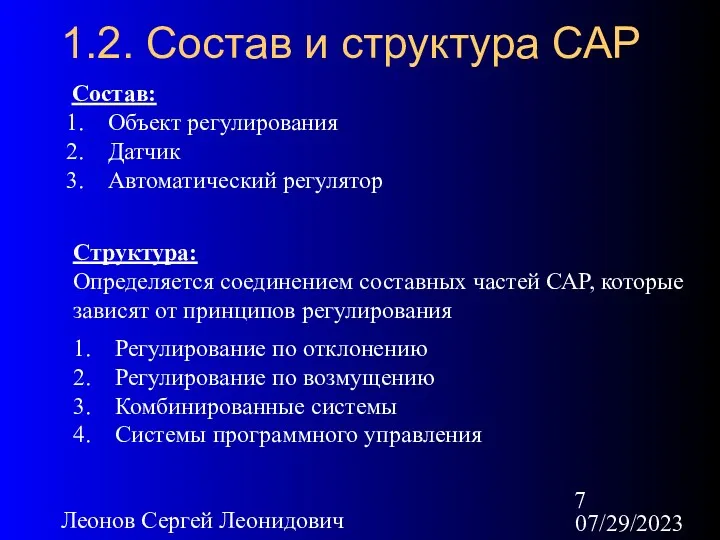
1.2. Состав и структура САР
Состав:
Объект регулирования
Датчик
Автоматический регулятор
Структура:
Определяется соединением составных
07/29/2023
Леонов Сергей Леонидович
1.2. Состав и структура САР
Состав:
Объект регулирования
Датчик
Автоматический регулятор
Структура:
Определяется соединением составных
07/29/2023
Леонов Сергей Леонидович
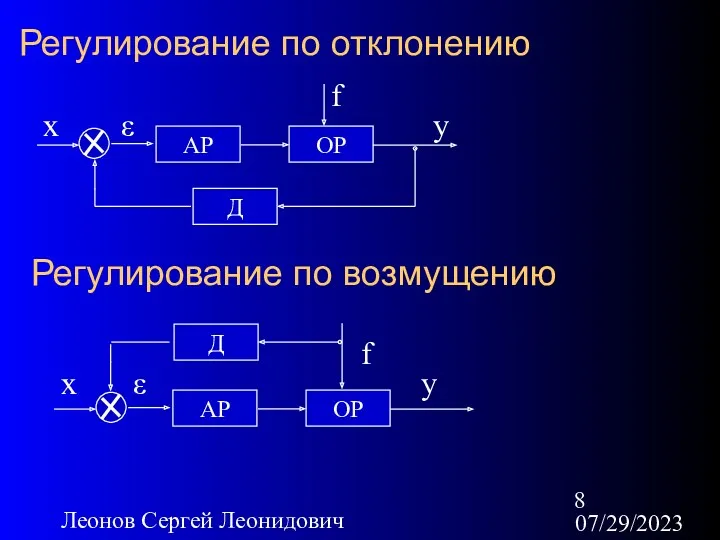
Регулирование по отклонению
АР
ОР
Д
ε
x
y
Регулирование по возмущению
АР
ОР
Д
f
x
ε
y
f
07/29/2023
Леонов Сергей Леонидович
Регулирование по отклонению
АР
ОР
Д
ε
x
y
Регулирование по возмущению
АР
ОР
Д
f
x
ε
y
f
07/29/2023
Леонов Сергей Леонидович
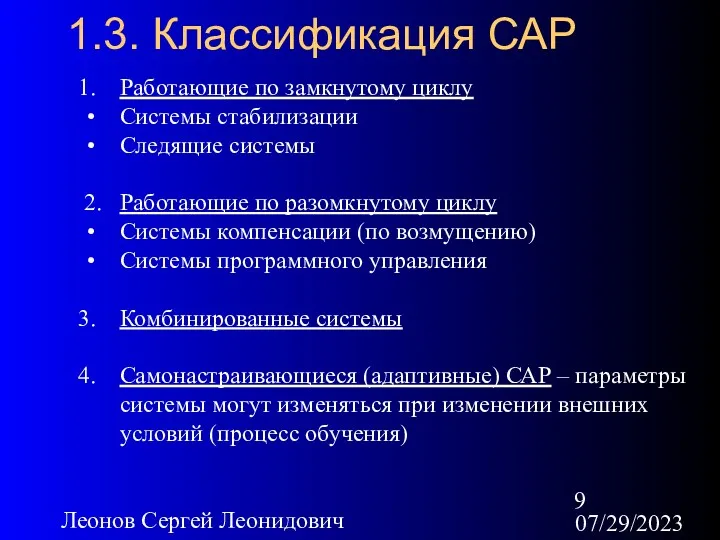
1.3. Классификация САР
Работающие по замкнутому циклу
Системы стабилизации
Следящие системы
2. Работающие
07/29/2023
Леонов Сергей Леонидович
1.3. Классификация САР
Работающие по замкнутому циклу
Системы стабилизации
Следящие системы
2. Работающие
07/29/2023
Леонов Сергей Леонидович
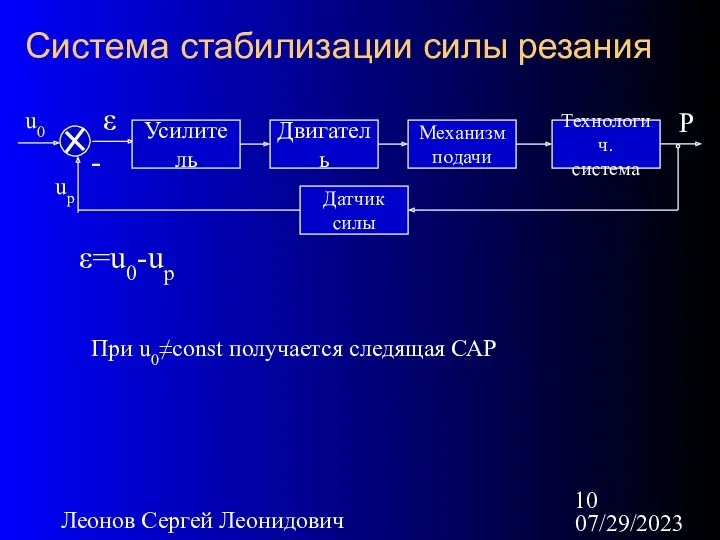
Система стабилизации силы резания
Усилитель
Двигатель
Механизм
подачи
Технологич.
система
Датчик
силы
-
u0
ε
up
ε=u0-up
P
При u0≠const получается следящая САР
07/29/2023
Леонов Сергей Леонидович
Система стабилизации силы резания
Усилитель
Двигатель
Механизм
подачи
Технологич.
система
Датчик
силы
-
u0
ε
up
ε=u0-up
P
При u0≠const получается следящая САР
07/29/2023
Леонов Сергей Леонидович
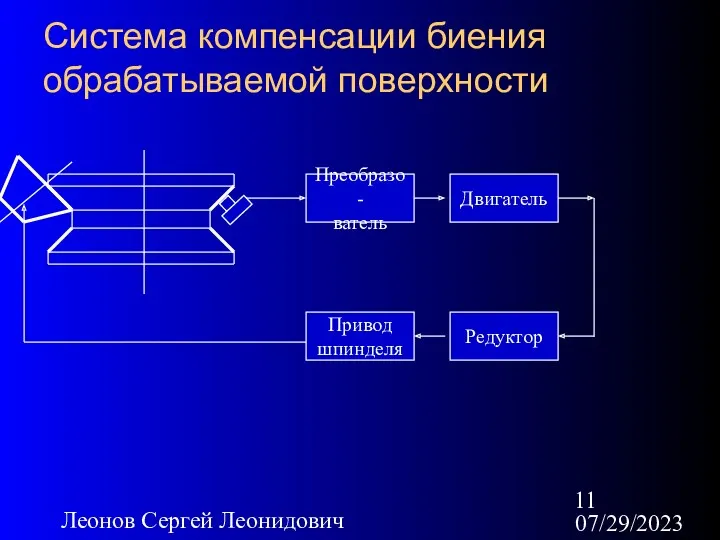
Система компенсации биения обрабатываемой поверхности
Преобразо-
ватель
Двигатель
Привод
шпинделя
Редуктор
07/29/2023
Леонов Сергей Леонидович
Система компенсации биения обрабатываемой поверхности
Преобразо-
ватель
Двигатель
Привод
шпинделя
Редуктор
07/29/2023
Леонов Сергей Леонидович
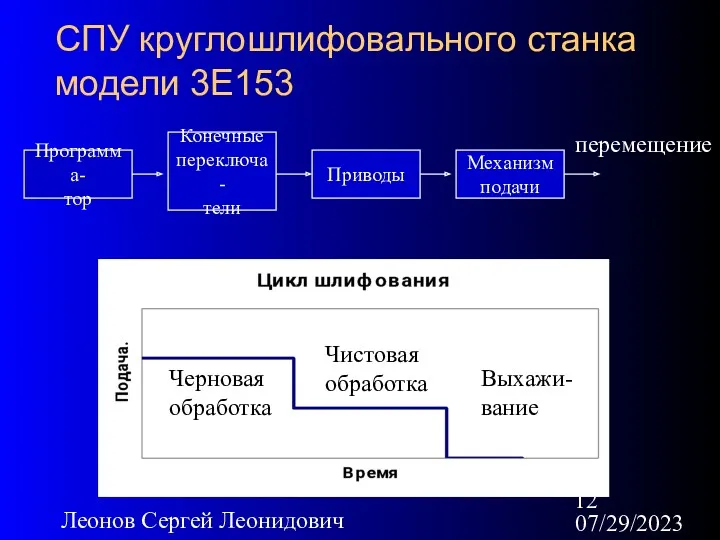
СПУ круглошлифовального станка модели 3Е153
Программа-
тор
Конечные
переключа-
тели
Приводы
Механизм
подачи
перемещение
Черновая
обработка
Чистовая обработка
Выхажи-вание
07/29/2023
Леонов Сергей Леонидович
СПУ круглошлифовального станка модели 3Е153
Программа-
тор
Конечные
переключа-
тели
Приводы
Механизм
подачи
перемещение
Черновая
обработка
Чистовая обработка
Выхажи-вание
07/29/2023
Леонов Сергей Леонидович
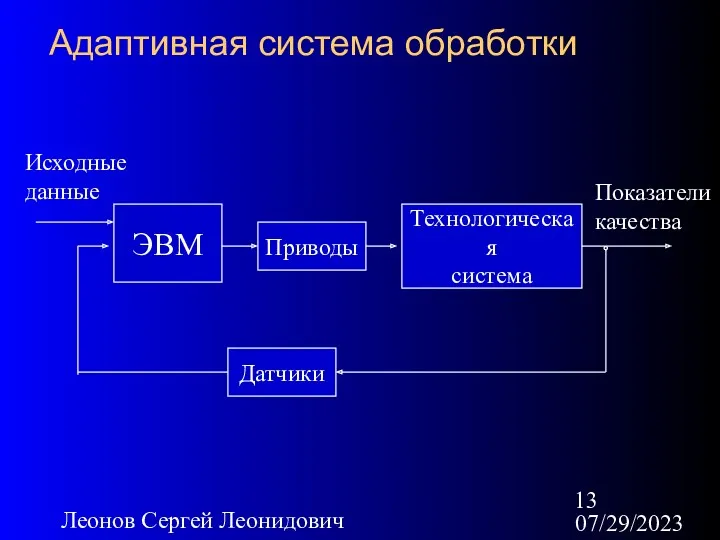
Адаптивная система обработки
ЭВМ
Приводы
Технологическая
система
Датчики
Исходные
данные
Показатели
качества
07/29/2023
Леонов Сергей Леонидович
Адаптивная система обработки
ЭВМ
Приводы
Технологическая
система
Датчики
Исходные
данные
Показатели
качества
07/29/2023
Леонов Сергей Леонидович
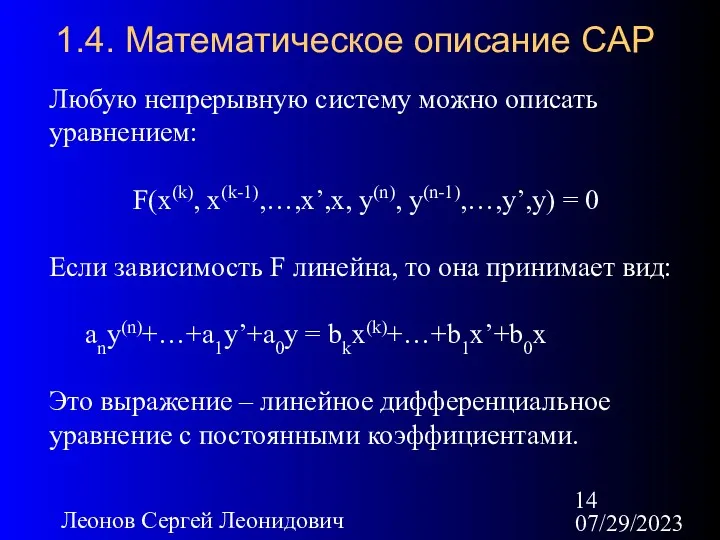
1.4. Математическое описание САР
Любую непрерывную систему можно описать
уравнением:
07/29/2023
Леонов Сергей Леонидович
1.4. Математическое описание САР
Любую непрерывную систему можно описать
уравнением:

07/29/2023
Леонов Сергей Леонидович
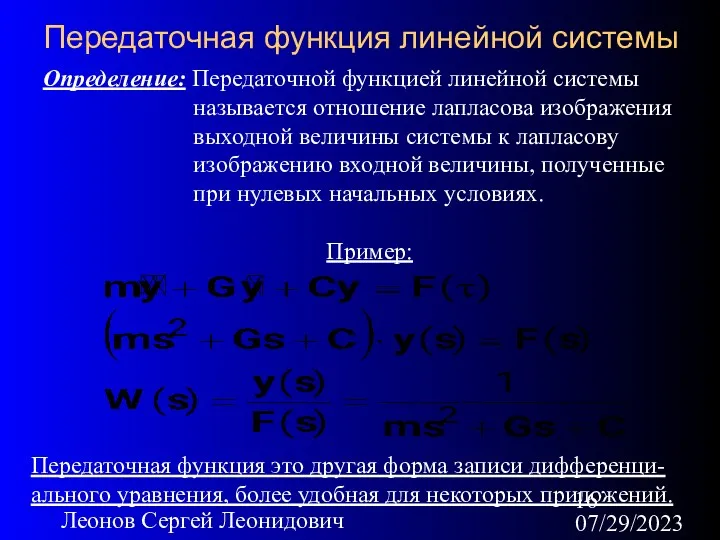
Передаточная функция линейной системы
Система описывается дифференциальным уравнением:
any(n)+…+a1y’+a0y = bkx(k)+…+b1x’+b0x
Формально
07/29/2023
Леонов Сергей Леонидович
Передаточная функция линейной системы
Система описывается дифференциальным уравнением:
any(n)+…+a1y’+a0y = bkx(k)+…+b1x’+b0x
Формально
07/29/2023
Леонов Сергей Леонидович
Передаточная функция линейной системы
Определение: Передаточной функцией линейной системы называется
07/29/2023
Леонов Сергей Леонидович
Передаточная функция линейной системы
Определение: Передаточной функцией линейной системы называется
07/29/2023
Леонов Сергей Леонидович
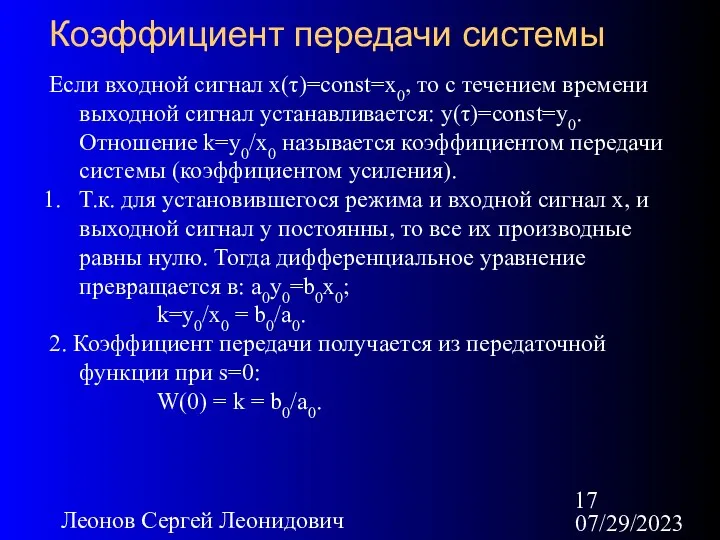
Коэффициент передачи системы
Если входной сигнал x(τ)=const=x0, то с течением
07/29/2023
Леонов Сергей Леонидович
Коэффициент передачи системы
Если входной сигнал x(τ)=const=x0, то с течением
07/29/2023
Леонов Сергей Леонидович
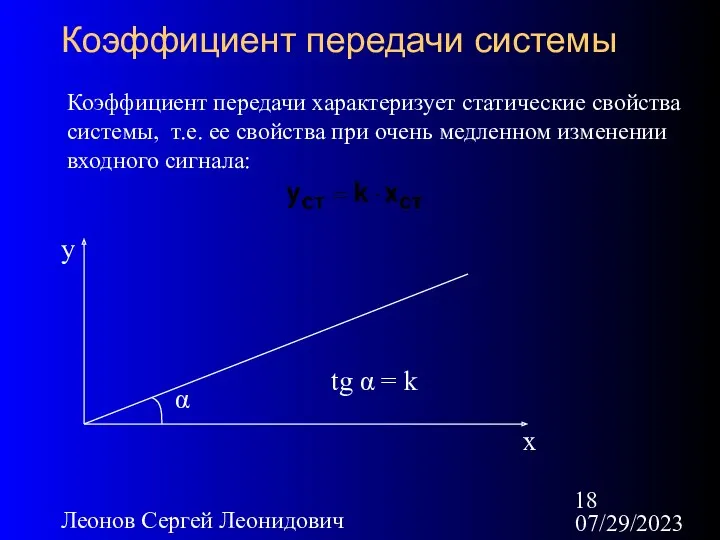
Коэффициент передачи системы
Коэффициент передачи характеризует статические свойства системы, т.е.
07/29/2023
Леонов Сергей Леонидович
Коэффициент передачи системы
Коэффициент передачи характеризует статические свойства системы, т.е.

07/29/2023
Леонов Сергей Леонидович
1.5. Преобразование структурных схем
Задано математическое описание (передаточные функции) звеньев
07/29/2023
Леонов Сергей Леонидович
1.5. Преобразование структурных схем
Задано математическое описание (передаточные функции) звеньев
07/29/2023
Леонов Сергей Леонидович
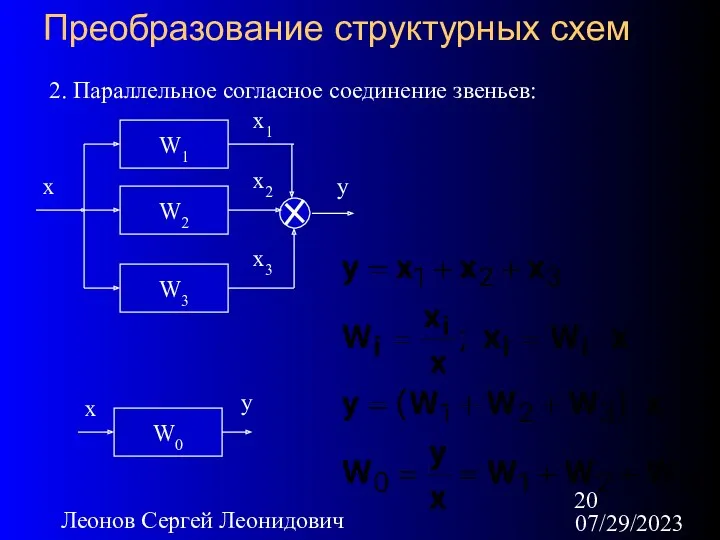
Преобразование структурных схем
2. Параллельное согласное соединение звеньев:
W1
W2
W3
x
y
x1
x2
x3
W0
x
y
07/29/2023
Леонов Сергей Леонидович
Преобразование структурных схем
2. Параллельное согласное соединение звеньев:
W1
W2
W3
x
y
x1
x2
x3
W0
x
y
07/29/2023
Леонов Сергей Леонидович
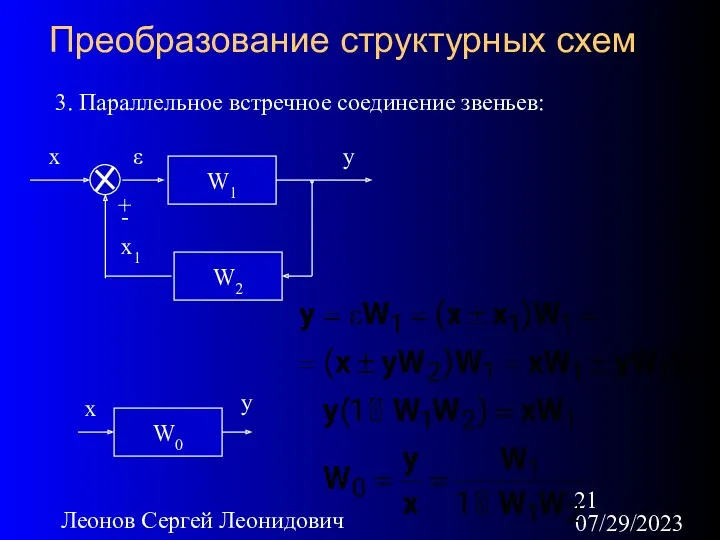
Преобразование структурных схем
3. Параллельное встречное соединение звеньев:
W1
W2
x
y
x1
W0
x
y
ε
+
-
07/29/2023
Леонов Сергей Леонидович
Преобразование структурных схем
3. Параллельное встречное соединение звеньев:
W1
W2
x
y
x1
W0
x
y
ε
+
-
07/29/2023
Леонов Сергей Леонидович
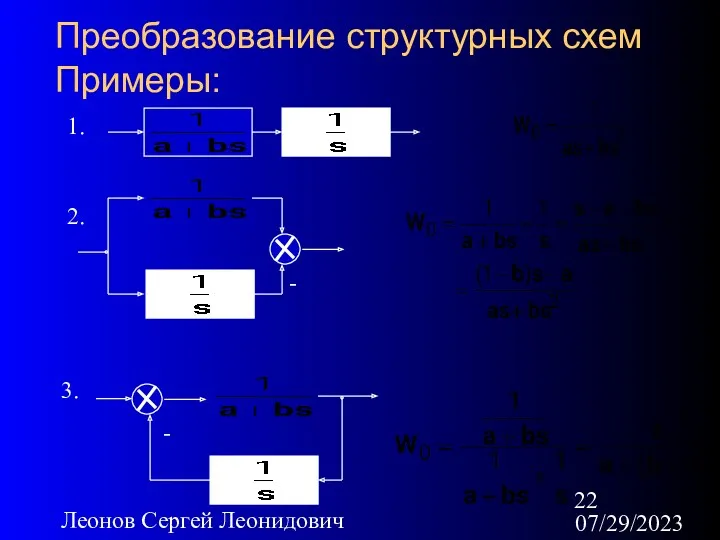
Преобразование структурных схем
Примеры:
1.
2.
-
3.
-
07/29/2023
Леонов Сергей Леонидович
Преобразование структурных схем
Примеры:
1.
2.
-
3.
-
07/29/2023
Леонов Сергей Леонидович
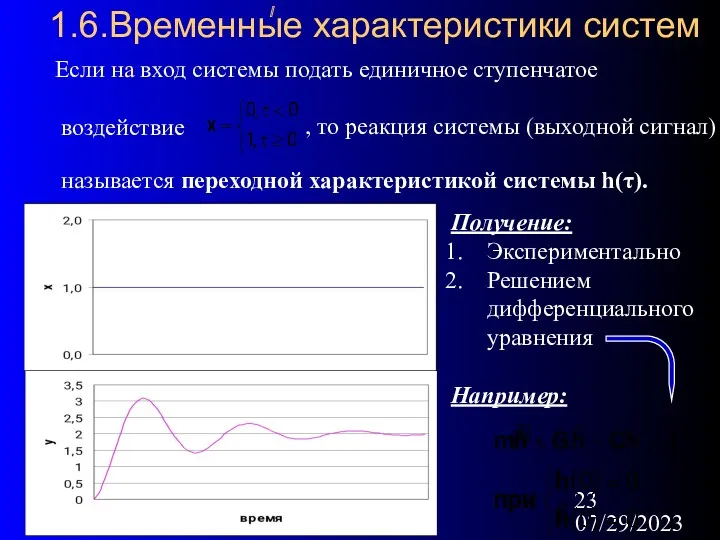
1.6.Временные характеристики систем
Если на вход системы подать единичное ступенчатое
07/29/2023
Леонов Сергей Леонидович
1.6.Временные характеристики систем
Если на вход системы подать единичное ступенчатое
07/29/2023
Леонов Сергей Леонидович
Функция веса
Если на вход системы подать δ-функцию Хевисайда
,
07/29/2023
Леонов Сергей Леонидович
Функция веса
Если на вход системы подать δ-функцию Хевисайда
,
07/29/2023
Леонов Сергей Леонидович
Временные характеристики систем
Временные характеристики h(τ) и g(τ) наиболее полно
07/29/2023
Леонов Сергей Леонидович
Временные характеристики систем
Временные характеристики h(τ) и g(τ) наиболее полно

07/29/2023
Леонов Сергей Леонидович
Параметры качества на переходной характеристике
k
±5% от k
tп
Коэффициент передачи (усиления)
07/29/2023
Леонов Сергей Леонидович
Параметры качества на переходной характеристике
k
±5% от k
tп
Коэффициент передачи (усиления)
07/29/2023
Леонов Сергей Леонидович
Пример расчета переходной характеристики
07/29/2023
Леонов Сергей Леонидович
Пример расчета переходной характеристики
07/29/2023
Леонов Сергей Леонидович
1.7.Частотные характеристики систем
Если на вход системы подать гармонический сигнал
07/29/2023
Леонов Сергей Леонидович
1.7.Частотные характеристики систем
Если на вход системы подать гармонический сигнал
07/29/2023
Леонов Сергей Леонидович
Примеры частотных характеристик
07/29/2023
Леонов Сергей Леонидович
Примеры частотных характеристик

07/29/2023
Леонов Сергей Леонидович
Получение частотных характеристик
Из передаточной функции системы
Заменим в передаточной функции
07/29/2023
Леонов Сергей Леонидович
Получение частотных характеристик
Из передаточной функции системы
Заменим в передаточной функции
07/29/2023
Леонов Сергей Леонидович
Получение частотных характеристик
Пример:
ω=1
07/29/2023
Леонов Сергей Леонидович
Получение частотных характеристик
Пример:
ω=1
07/29/2023
Леонов Сергей Леонидович
Логарифмические частотные характеристики
Позволяют более подробно рассмотреть начало и
07/29/2023
Леонов Сергей Леонидович
Логарифмические частотные характеристики
Позволяют более подробно рассмотреть начало и
07/29/2023
Леонов Сергей Леонидович
Логарифмические частотные характеристики
Асимптотическая ЛАЧХ – это приближенное представление
07/29/2023
Леонов Сергей Леонидович
Логарифмические частотные характеристики
Асимптотическая ЛАЧХ – это приближенное представление
07/29/2023
Леонов Сергей Леонидович
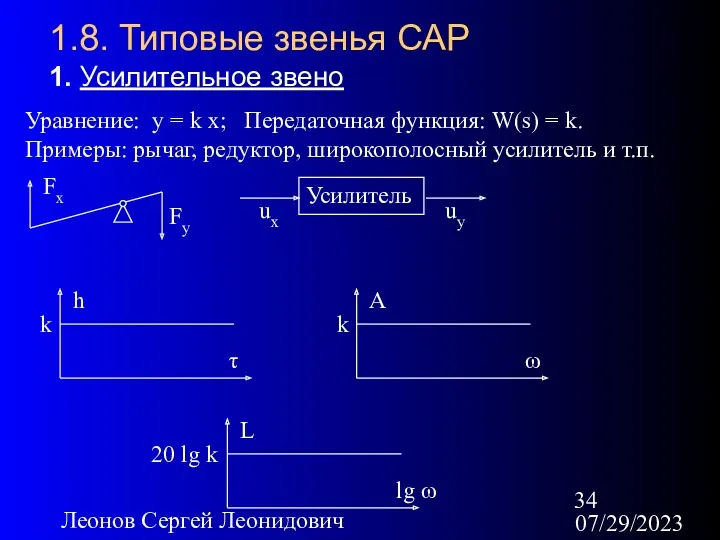
1.8. Типовые звенья САР
1. Усилительное звено
Уравнение: y = k
07/29/2023
Леонов Сергей Леонидович
1.8. Типовые звенья САР
1. Усилительное звено
Уравнение: y = k
07/29/2023
Леонов Сергей Леонидович
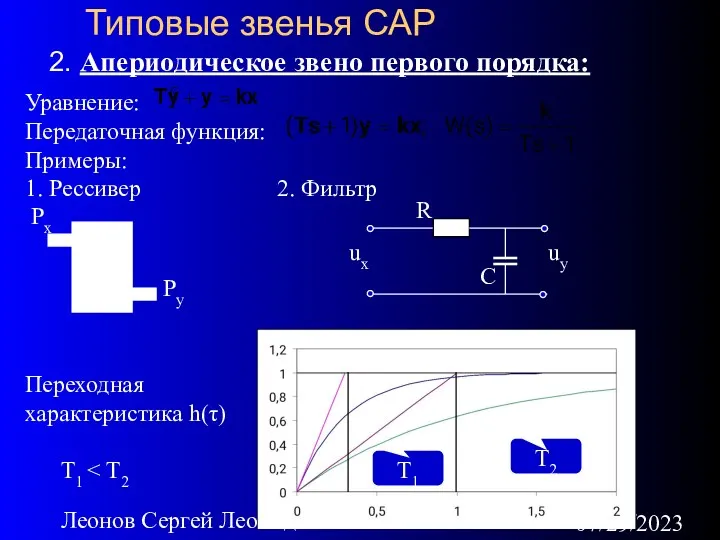
Типовые звенья САР
2. Апериодическое звено первого порядка:
Уравнение:
Передаточная функция:
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
2. Апериодическое звено первого порядка:
Уравнение:
Передаточная функция:
07/29/2023
Леонов Сергей Леонидович
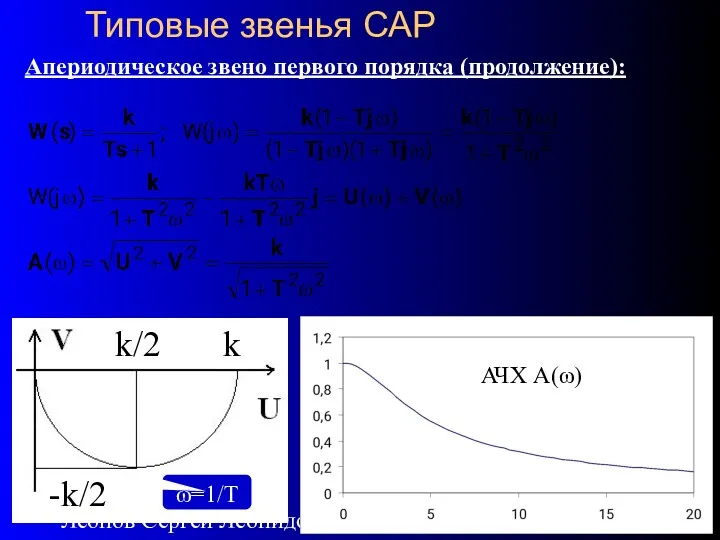
Типовые звенья САР
Апериодическое звено первого порядка (продолжение):
k/2
-k/2
k
ω=1/T
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Апериодическое звено первого порядка (продолжение):
k/2
-k/2
k
ω=1/T
07/29/2023
Леонов Сергей Леонидович
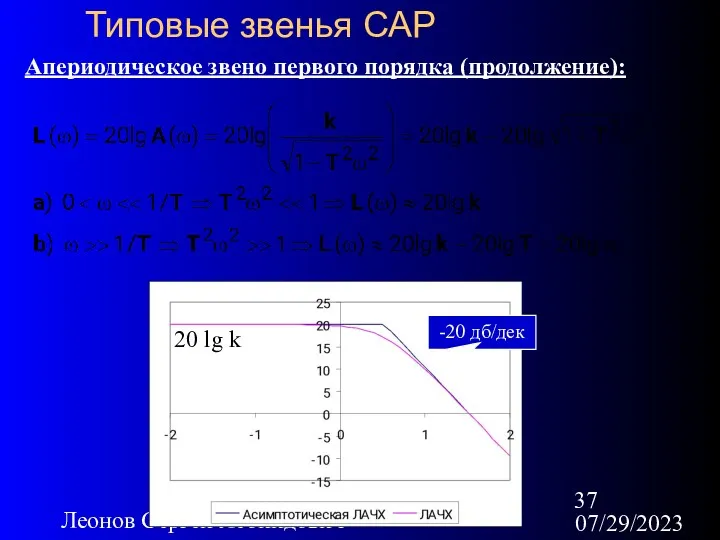
Типовые звенья САР
Апериодическое звено первого порядка (продолжение):
20 lg k
-20
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Апериодическое звено первого порядка (продолжение):
20 lg k
-20
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
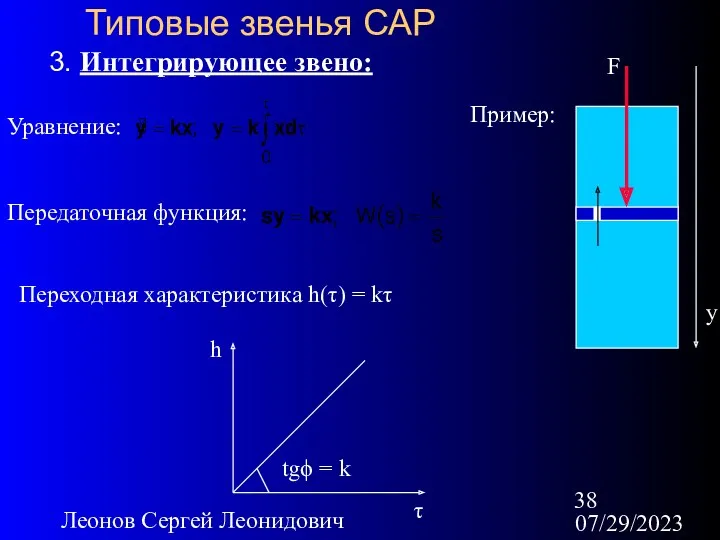
3. Интегрирующее звено:
Уравнение:
Передаточная функция:
Переходная характеристика
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
3. Интегрирующее звено:
Уравнение:
Передаточная функция:
Переходная характеристика
07/29/2023
Леонов Сергей Леонидович
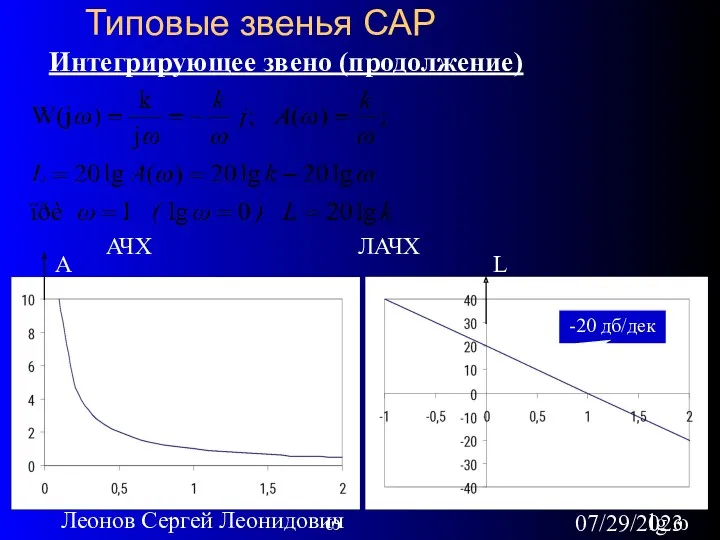
Типовые звенья САР
Интегрирующее звено (продолжение)
АЧХ ЛАЧХ
A
ω
L
lg ω
-20 дб/дек
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Интегрирующее звено (продолжение)
АЧХ ЛАЧХ
A
ω
L
lg ω
-20 дб/дек
07/29/2023
Леонов Сергей Леонидович
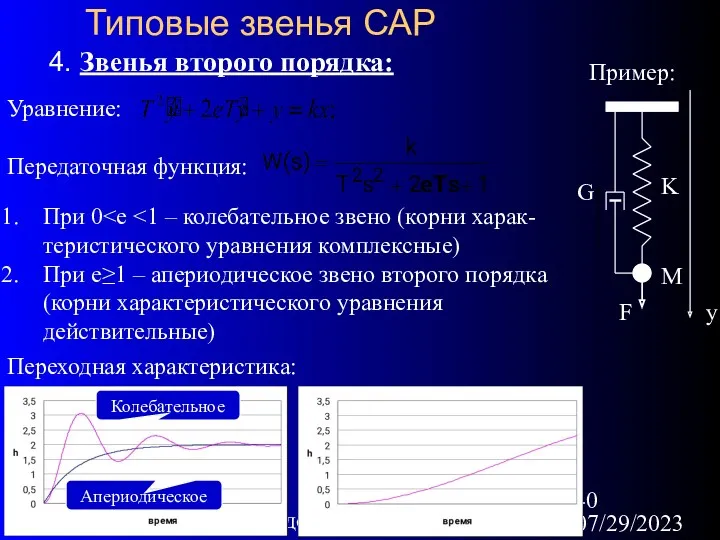
Типовые звенья САР
4. Звенья второго порядка:
Уравнение:
Передаточная функция:
При 0
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
4. Звенья второго порядка:
Уравнение:
Передаточная функция:
При 0
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Звенья второго порядка (продолжение):
При 0
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Звенья второго порядка (продолжение):
При 0

07/29/2023
Леонов Сергей Леонидович
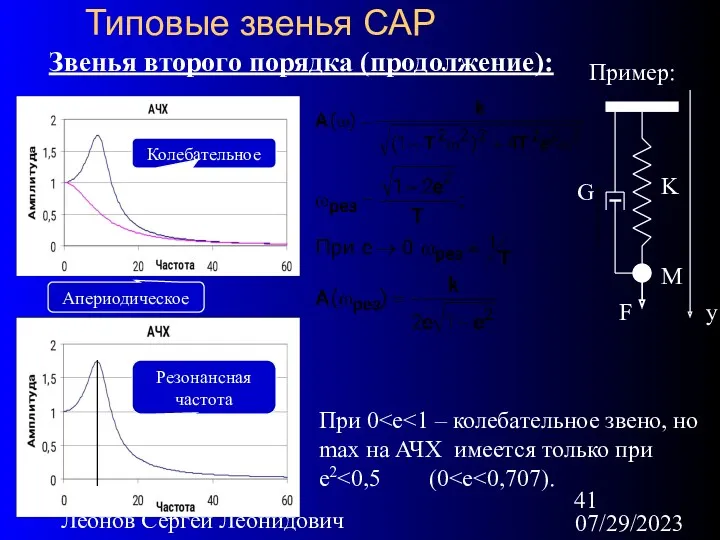
Типовые звенья САР
Звенья второго порядка (продолжение):
3. При e=0 –
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Звенья второго порядка (продолжение):
3. При e=0 –
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Звенья второго порядка (продолжение):
Пример:
F
y
M
G
K
20 lg k
-40 дб/дек
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Звенья второго порядка (продолжение):
Пример:
F
y
M
G
K
20 lg k
-40 дб/дек
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Звенья второго порядка (продолжение):
Пример:
F
y
M
G
K
Апериодическое звено второго порядка
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
Звенья второго порядка (продолжение):
Пример:
F
y
M
G
K
Апериодическое звено второго порядка
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
5. Идеальное дифференцирующее звено:
Уравнение:
Передаточная функция:
Переходная
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
5. Идеальное дифференцирующее звено:
Уравнение:
Передаточная функция:
Переходная
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
6. Форсирующее звено:
Уравнение:
Передаточная функция:
y
7. Форсирующее
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР
6. Форсирующее звено:
Уравнение:
Передаточная функция:
y
7. Форсирующее
07/29/2023
Леонов Сергей Леонидович
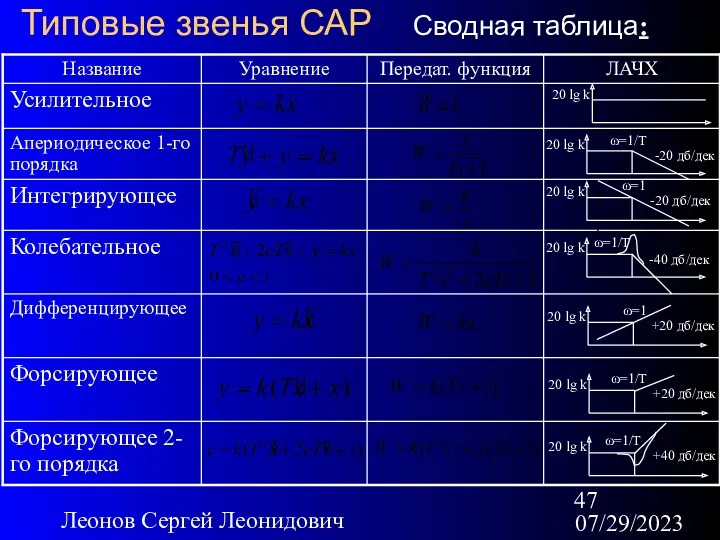
Типовые звенья САР Сводная таблица:
20 lg k
-20 дб/дек
-40 дб/дек
20
07/29/2023
Леонов Сергей Леонидович
Типовые звенья САР Сводная таблица:
20 lg k
-20 дб/дек
-40 дб/дек
20
07/29/2023
Леонов Сергей Леонидович
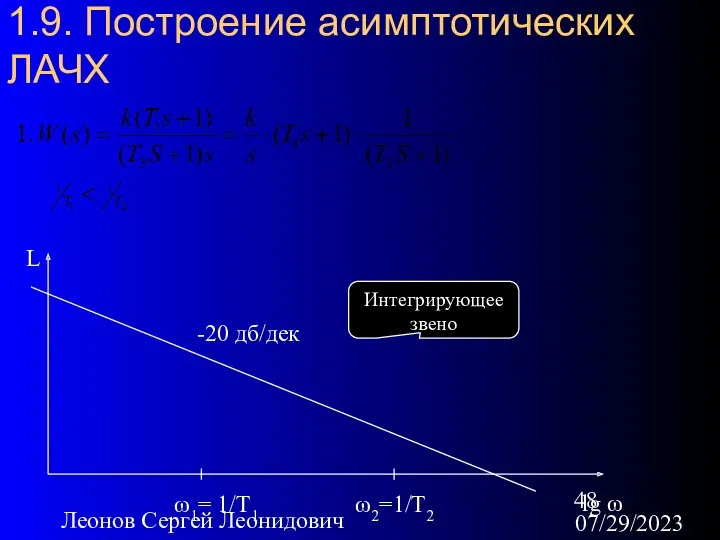
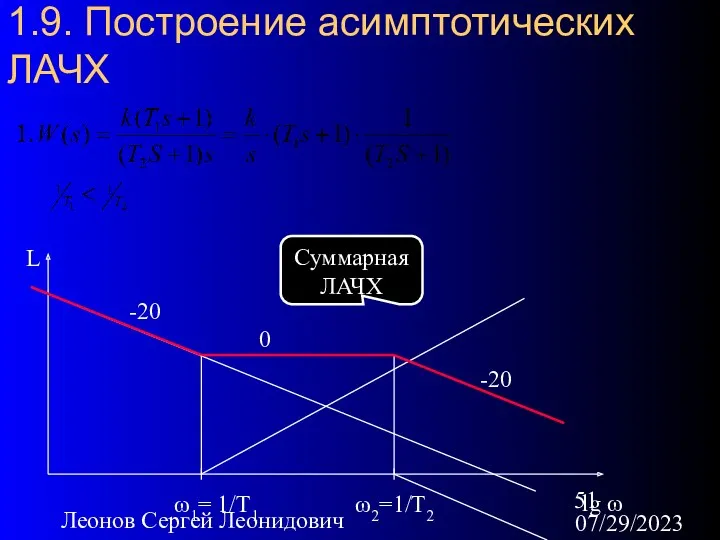
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
Интегрирующее звено
-20 дб/дек
07/29/2023
Леонов Сергей Леонидович
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
Интегрирующее звено
-20 дб/дек
07/29/2023
Леонов Сергей Леонидович
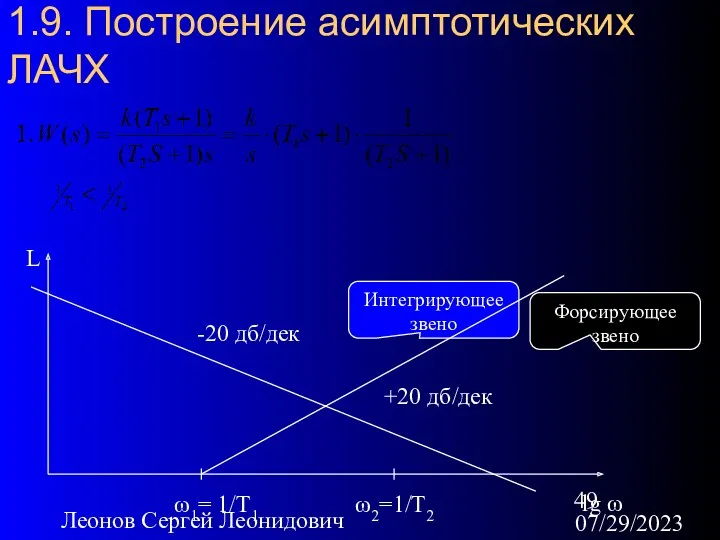
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
Интегрирующее звено
-20 дб/дек
+20 дб/дек
Форсирующее
07/29/2023
Леонов Сергей Леонидович
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
Интегрирующее звено
-20 дб/дек
+20 дб/дек
Форсирующее
07/29/2023
Леонов Сергей Леонидович
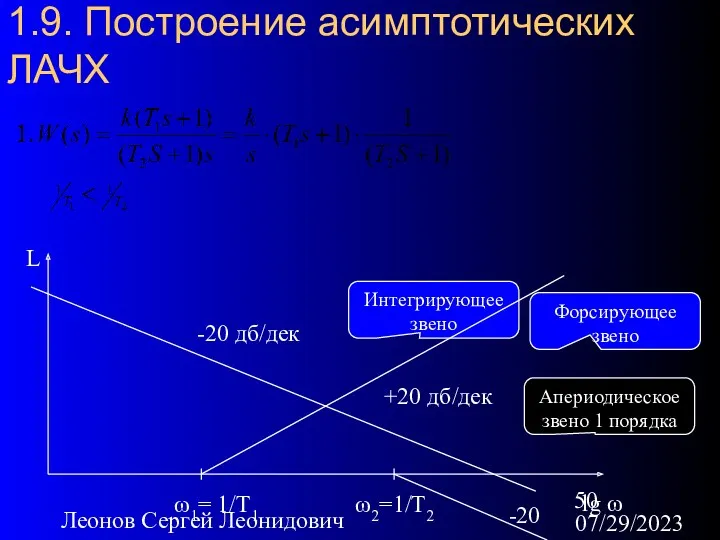
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
Интегрирующее звено
-20 дб/дек
+20 дб/дек
Форсирующее
07/29/2023
Леонов Сергей Леонидович
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
Интегрирующее звено
-20 дб/дек
+20 дб/дек
Форсирующее
07/29/2023
Леонов Сергей Леонидович
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
-20
Суммарная ЛАЧХ
-20
0
07/29/2023
Леонов Сергей Леонидович
1.9. Построение асимптотических ЛАЧХ
L
lg ω
ω1= 1/T1
ω2=1/T2
-20
Суммарная ЛАЧХ
-20
0
07/29/2023
Леонов Сергей Леонидович
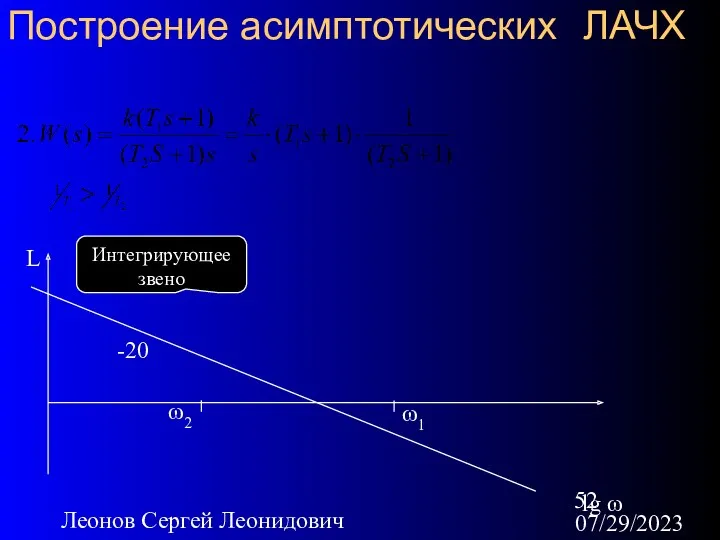
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
-20
Интегрирующее звено
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
-20
Интегрирующее звено
07/29/2023
Леонов Сергей Леонидович
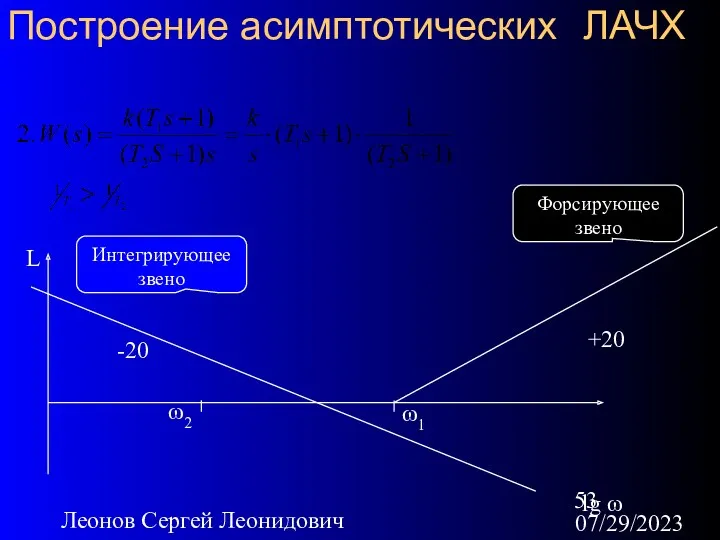
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
-20
Интегрирующее звено
+20
Форсирующее звено
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
-20
Интегрирующее звено
+20
Форсирующее звено
07/29/2023
Леонов Сергей Леонидович
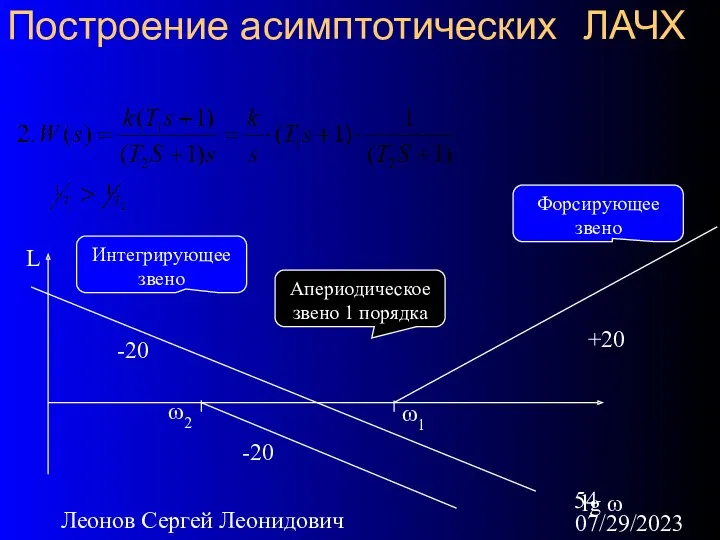
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
-20
Интегрирующее звено
+20
Форсирующее звено
-20
Апериодическое звено 1 порядка
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
-20
Интегрирующее звено
+20
Форсирующее звено
-20
Апериодическое звено 1 порядка

07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
Суммарная ЛАЧХ
-20
+20
-20
-20
-40
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω2
ω1
Суммарная ЛАЧХ
-20
+20
-20
-20
-40
07/29/2023
Леонов Сергей Леонидович
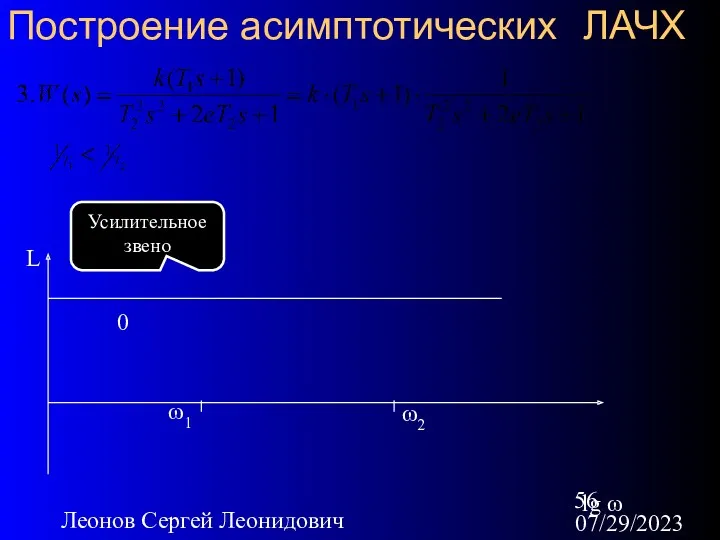
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Усилительное
звено
0
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Усилительное
звено
0
07/29/2023
Леонов Сергей Леонидович
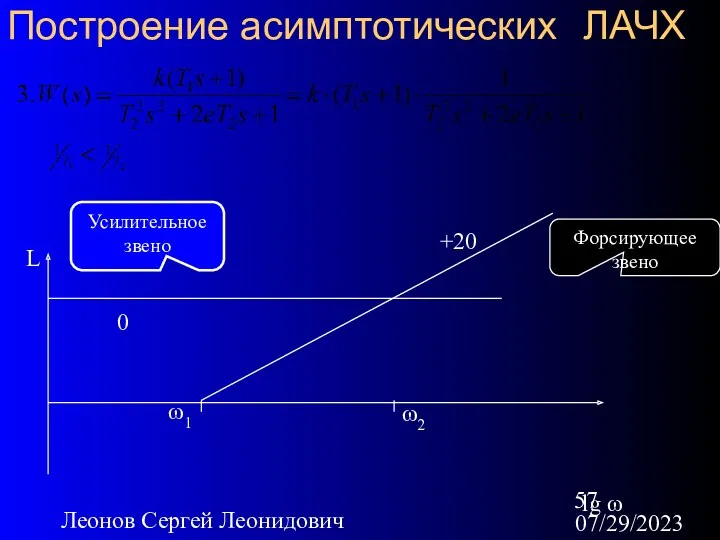
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Усилительное
звено
0
+20
Форсирующее звено
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Усилительное
звено
0
+20
Форсирующее звено
07/29/2023
Леонов Сергей Леонидович
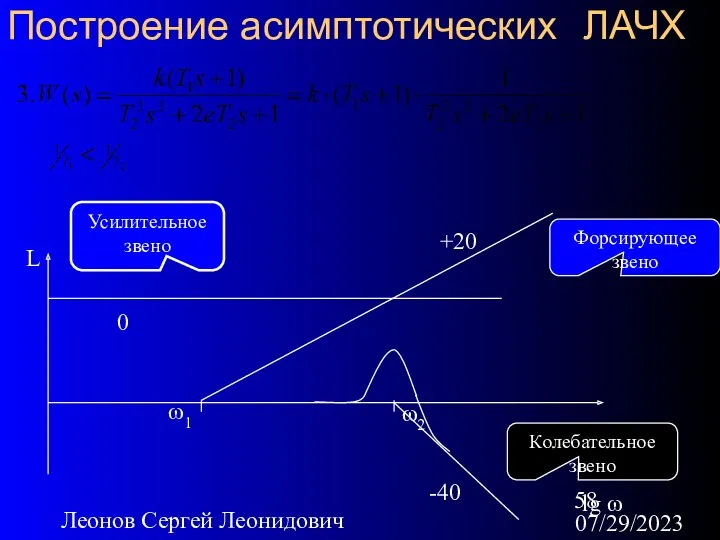
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Усилительное
звено
0
+20
Форсирующее звено
-40
Колебательное звено
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Усилительное
звено
0
+20
Форсирующее звено
-40
Колебательное звено
07/29/2023
Леонов Сергей Леонидович
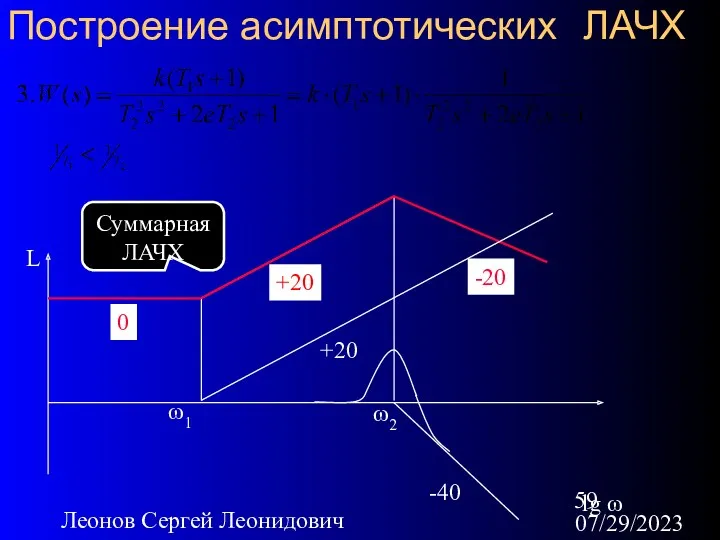
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Суммарная ЛАЧХ
0
+20
-20
-40
+20
07/29/2023
Леонов Сергей Леонидович
Построение асимптотических ЛАЧХ
L
lg ω
ω1
ω2
Суммарная ЛАЧХ
0
+20
-20
-40
+20
07/29/2023
Леонов Сергей Леонидович
1.10. Идентификация САР
Математическое описание системы известно. Необходимо опре-
делить параметры
07/29/2023
Леонов Сергей Леонидович
1.10. Идентификация САР
Математическое описание системы известно. Необходимо опре-
делить параметры
07/29/2023
Леонов Сергей Леонидович
Идентификация САР
2. Определение вида W(s) по ЛАЧХ:
а) Строим экспериментальную
07/29/2023
Леонов Сергей Леонидович
Идентификация САР
2. Определение вида W(s) по ЛАЧХ:
а) Строим экспериментальную
07/29/2023
Леонов Сергей Леонидович
Идентификация САР
Проблемы построения W(s):
Сложность подачи гармонического сигнала на вход
07/29/2023
Леонов Сергей Леонидович
Идентификация САР
Проблемы построения W(s):
Сложность подачи гармонического сигнала на вход
07/29/2023
Леонов Сергей Леонидович
Идентификация САР
Экспресс-методика идентификации операции ТП:
Создаем заготовку в виде шлицевого
07/29/2023
Леонов Сергей Леонидович
Идентификация САР
Экспресс-методика идентификации операции ТП:
Создаем заготовку в виде шлицевого
07/29/2023
Леонов Сергей Леонидович
1.11. Статические и астатические САР
-
x
yp
ε = u - x
ПФ
07/29/2023
Леонов Сергей Леонидович
1.11. Статические и астатические САР
-
x
yp
ε = u - x
ПФ
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР
-
x
yp
ε = u - x
При
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР
-
x
yp
ε = u - x
При
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР
-
x
yp
ε = u - x
В
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР
-
x
yp
ε = u - x
В
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР
-
x
yp
ε = u - x
1.
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР
-
x
yp
ε = u - x
1.
07/29/2023
Леонов Сергей Леонидович
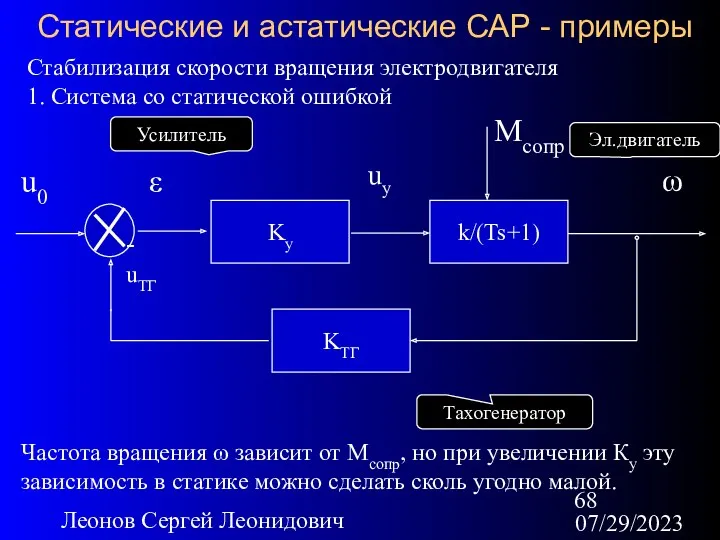
Статические и астатические САР - примеры
Стабилизация скорости вращения
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР - примеры
Стабилизация скорости вращения
07/29/2023
Леонов Сергей Леонидович
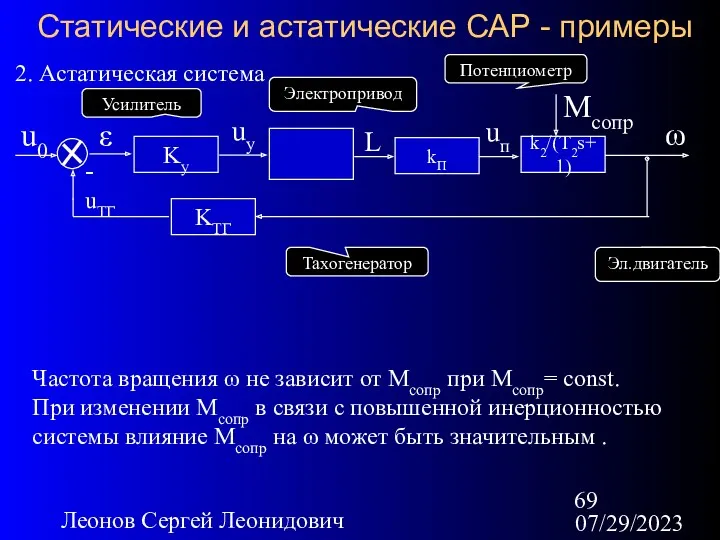
Статические и астатические САР - примеры
Частота вращения ω
07/29/2023
Леонов Сергей Леонидович
Статические и астатические САР - примеры
Частота вращения ω
07/29/2023
Леонов Сергей Леонидович
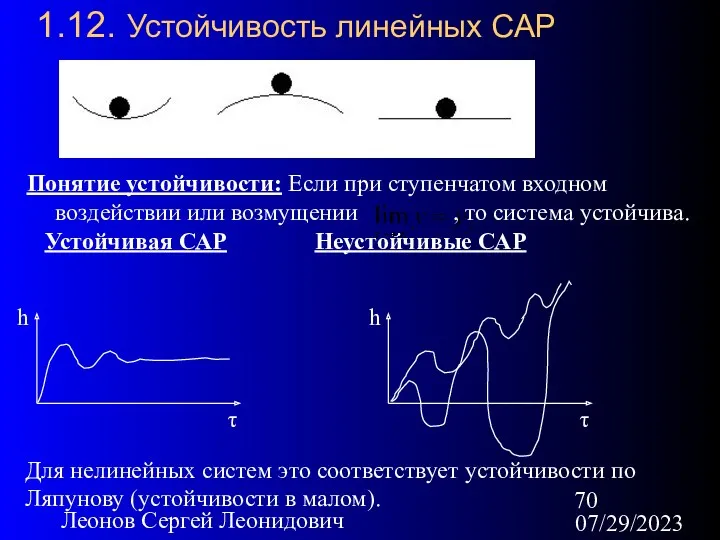
1.12. Устойчивость линейных САР
Понятие устойчивости: Если при ступенчатом
07/29/2023
Леонов Сергей Леонидович
1.12. Устойчивость линейных САР
Понятие устойчивости: Если при ступенчатом

07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Необходимое и достаточное условие устойчивости:
Система
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Необходимое и достаточное условие устойчивости:
Система
07/29/2023
Леонов Сергей Леонидович
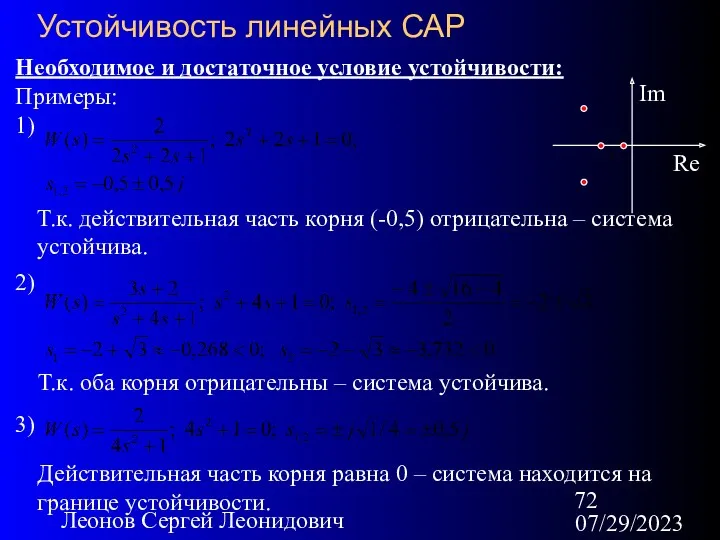
Устойчивость линейных САР
Необходимое и достаточное условие устойчивости:
Примеры:
1)
Re
Im
2)
3)
Т.к.
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Необходимое и достаточное условие устойчивости:
Примеры:
1)
Re
Im
2)
3)
Т.к.
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Необходимое условие устойчивости:
(не является достаточным)
Для устойчивости
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Необходимое условие устойчивости:
(не является достаточным)
Для устойчивости
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
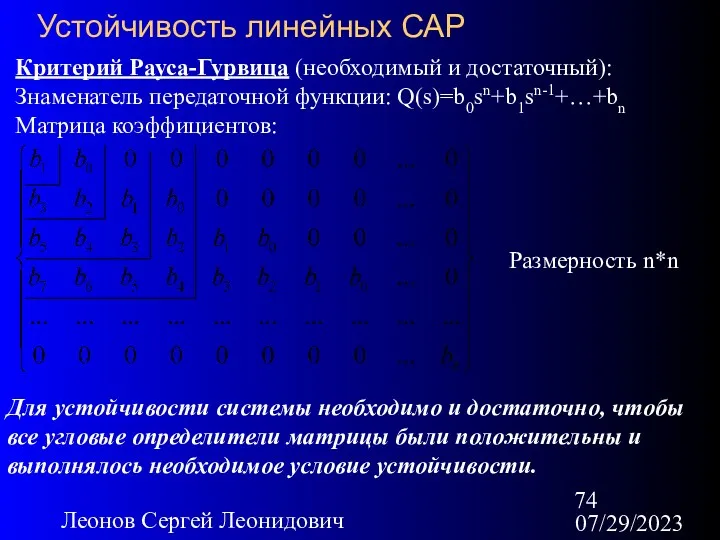
Критерий Рауса-Гурвица (необходимый и достаточный):
Знаменатель передаточной
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Критерий Рауса-Гурвица (необходимый и достаточный):
Знаменатель передаточной
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
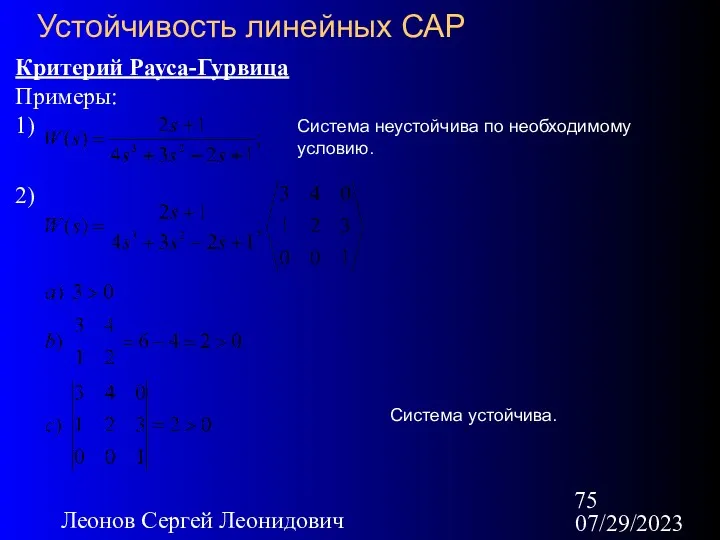
Критерий Рауса-Гурвица
Примеры:
1)
Система неустойчива по необходимому
условию.
2)
Система
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Критерий Рауса-Гурвица
Примеры:
1)
Система неустойчива по необходимому
условию.
2)
Система
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
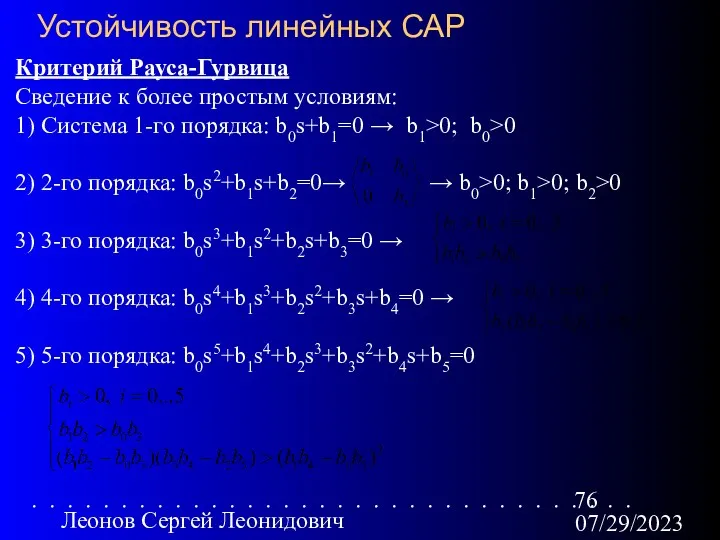
Критерий Рауса-Гурвица
Сведение к более простым
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Критерий Рауса-Гурвица
Сведение к более простым
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Частотный критерий Михайлова:
Знаменатель передаточной функции:
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Частотный критерий Михайлова:
Знаменатель передаточной функции:
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Частотный критерий Найквиста:
Замкнутая система
W1
W2
W3
W1
W2
W3
Разомкнутая
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Частотный критерий Найквиста:
Замкнутая система
W1
W2
W3
W1
W2
W3
Разомкнутая
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Частотный критерий Найквиста:
Если разомкнутая САР
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Частотный критерий Найквиста:
Если разомкнутая САР
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Сравнительные характеристики критериев устойчивости:
Необходимое и достаточное
07/29/2023
Леонов Сергей Леонидович
Устойчивость линейных САР
Сравнительные характеристики критериев устойчивости:
Необходимое и достаточное
07/29/2023
Леонов Сергей Леонидович
1.13. Запас устойчивости САР
Рассмотрим снова систему стабилизации скорости
07/29/2023
Леонов Сергей Леонидович
1.13. Запас устойчивости САР
Рассмотрим снова систему стабилизации скорости

07/29/2023
Леонов Сергей Леонидович
1.13. Запас устойчивости САР
2. Рассмотрим систему стабилизации скорости
07/29/2023
Леонов Сергей Леонидович
1.13. Запас устойчивости САР
2. Рассмотрим систему стабилизации скорости
07/29/2023
Леонов Сергей Леонидович
Запас устойчивости САР
Запас устойчивости САР – «расстояние» от
07/29/2023
Леонов Сергей Леонидович
Запас устойчивости САР
Запас устойчивости САР – «расстояние» от
07/29/2023
Леонов Сергей Леонидович
D-разбиение
Это оценка запаса устойчивости одновременно по двум параметрам.
Обозначим
07/29/2023
Леонов Сергей Леонидович
D-разбиение
Это оценка запаса устойчивости одновременно по двум параметрам.
Обозначим
07/29/2023
Леонов Сергей Леонидович
1.14. Законы регулирования
Пропорциональный закон (П-регулятор): y=kε; W(s)=k.
Обладает хорошими
07/29/2023
Леонов Сергей Леонидович
1.14. Законы регулирования
Пропорциональный закон (П-регулятор): y=kε; W(s)=k.
Обладает хорошими
07/29/2023
Леонов Сергей Леонидович
1.14. Законы регулирования
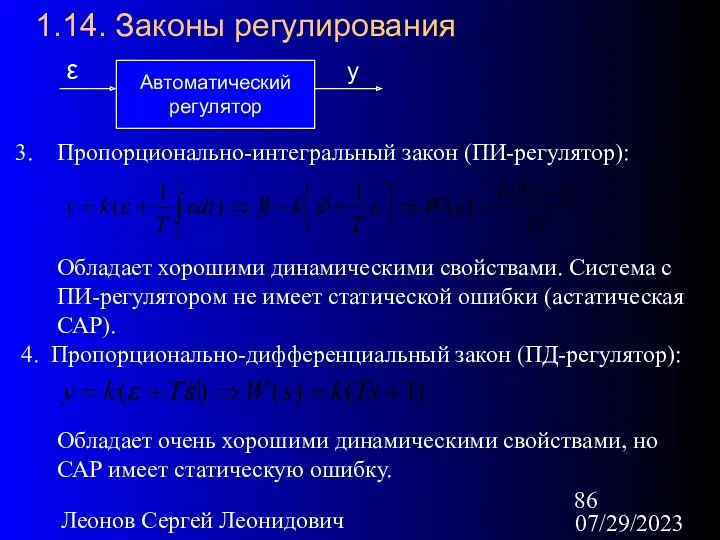
Пропорционально-интегральный закон (ПИ-регулятор):
Обладает хорошими динамическими
07/29/2023
Леонов Сергей Леонидович
1.14. Законы регулирования
Пропорционально-интегральный закон (ПИ-регулятор):
Обладает хорошими динамическими
07/29/2023
Леонов Сергей Леонидович
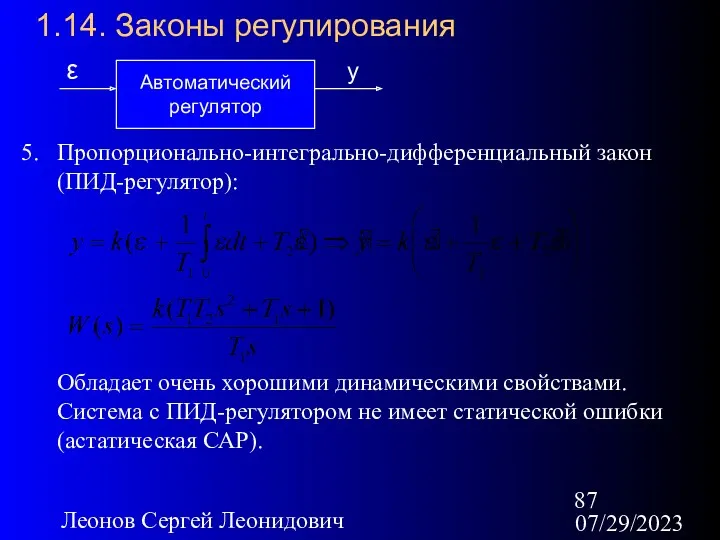
1.14. Законы регулирования
5. Пропорционально-интегрально-дифференциальный закон (ПИД-регулятор):
Обладает очень хорошими
07/29/2023
Леонов Сергей Леонидович
1.14. Законы регулирования
5. Пропорционально-интегрально-дифференциальный закон (ПИД-регулятор):
Обладает очень хорошими

07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
Датчики сопротивления.
а)контактные датчики
б)потенциометрические
k=E R/R0 (если не
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
Датчики сопротивления.
а)контактные датчики
б)потенциометрические
k=E R/R0 (если не
07/29/2023
Леонов Сергей Леонидович
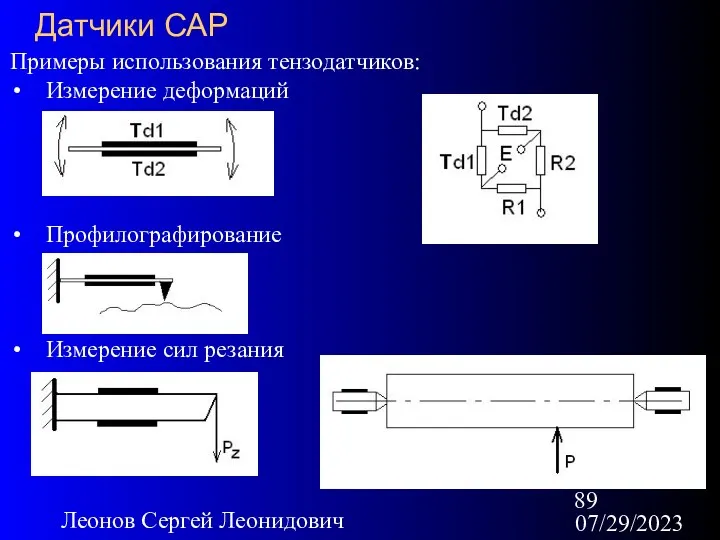
Датчики САР
Примеры использования тензодатчиков:
Измерение деформаций
Профилографирование
Измерение сил резания
07/29/2023
Леонов Сергей Леонидович
Датчики САР
Примеры использования тензодатчиков:
Измерение деформаций
Профилографирование
Измерение сил резания
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
Датчики сопротивления.
г) термосопротивления. Применяются для измерения
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
Датчики сопротивления.
г) термосопротивления. Применяются для измерения

07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
Использование фотосопротивлений:
Измерение светового потока (пирометры)
Определение степени
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
Использование фотосопротивлений:
Измерение светового потока (пирометры)
Определение степени
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
2. Индуктивные датчики.
Обмотки включены
навстречу друг другу
Основано
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
2. Индуктивные датчики.
Обмотки включены
навстречу друг другу
Основано
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
3. Емкостные датчики.
Измерение износа шлифо-вального круга
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
3. Емкостные датчики.
Измерение износа шлифо-вального круга
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
4. Датчики напряжения:
тахогенератор
пьезоэлемент
термопара (до 1500 ºС)
(хромель-капель,
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
4. Датчики напряжения:
тахогенератор
пьезоэлемент
термопара (до 1500 ºС)
(хромель-капель,
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
4. Датчики напряжения:
сельсины (измерение углов поворота)
Силовая
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
4. Датчики напряжения:
сельсины (измерение углов поворота)
Силовая
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
линейный магнитный
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
линейный магнитный

07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
фотоэлектрический импульсный
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
фотоэлектрический импульсный
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
фотоэлектрический датчик
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
фотоэлектрический датчик

07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
вращающиеся трансформаторы
Статор
Ротор
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
вращающиеся трансформаторы
Статор
Ротор
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
индуктосины
Обмотки AB
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
индуктосины
Обмотки AB
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
фотодатчики: фотодиодные
07/29/2023
Леонов Сергей Леонидович
2. Датчики САР
5. Датчики оборудования с ЧПУ:
фотодатчики: фотодиодные
07/29/2023
Леонов Сергей Леонидович
Усилительные элементы
07/29/2023
Леонов Сергей Леонидович
Усилительные элементы

07/29/2023
Леонов Сергей Леонидович
Моделирование САР
ЭЦВМ – для моделирования используются численные методы
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
ЭЦВМ – для моделирования используются численные методы

07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Блоки АВМ:
Сумматор
Интегросумматор
R1
R2
R0
U1
U2
R1
R2
U1
U2
С
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Блоки АВМ:
Сумматор
Интегросумматор
R1
R2
R0
U1
U2
R1
R2
U1
U2
С
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Блоки АВМ:
Масштабный блок
Инвертор
Интегратор
R
R0
U1
R
U1
С
R
R
U1
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Блоки АВМ:
Масштабный блок
Инвертор
Интегратор
R
R0
U1
R
U1
С
R
R
U1
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Решение линейных дифференциальных уравнений:
Выражаем старшую производную:
Составляем схему
1
1
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Решение линейных дифференциальных уравнений:
Выражаем старшую производную:
Составляем схему
1
1
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Решение линейных дифференциальных уравнений:
Выражаем старшую производную:
Составляем схему
1/a
1
c/a
b/a
x(τ)
07/29/2023
Леонов Сергей Леонидович
Моделирование САР
Решение линейных дифференциальных уравнений:
Выражаем старшую производную:
Составляем схему
1/a
1
c/a
b/a
x(τ)
 61f4bb8105f047b8922e06e3e916ed53
61f4bb8105f047b8922e06e3e916ed53 Сила упругости. Закон Гука. Сила реакции опоры. Причина возникновения силы упругости
Сила упругости. Закон Гука. Сила реакции опоры. Причина возникновения силы упругости Лампы накаливания. Электронагревательные приборы
Лампы накаливания. Электронагревательные приборы Урок по теме: Физические величины и их измерение.
Урок по теме: Физические величины и их измерение. Тормозная система автомобиля
Тормозная система автомобиля Конференция фонда Династия 2011 год
Конференция фонда Династия 2011 год Специальная теория относительности. Постулаты теории относительности
Специальная теория относительности. Постулаты теории относительности Жидкие кристаллы
Жидкие кристаллы Презентация по теме Импульс и его сохранение
Презентация по теме Импульс и его сохранение Измерение влажности
Измерение влажности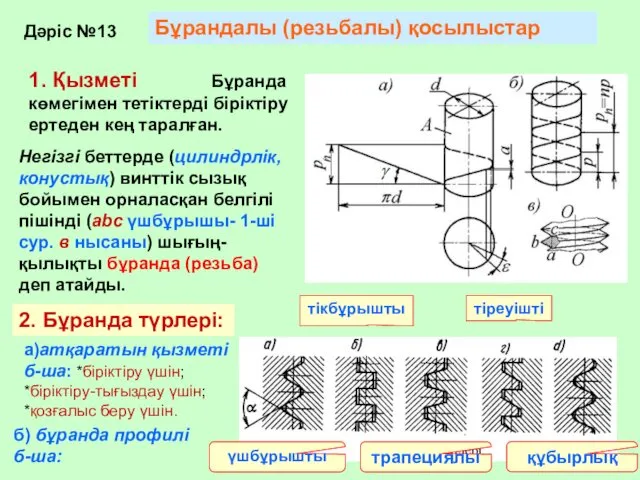 Бұрандалы қосылыстар
Бұрандалы қосылыстар Холодильные и теплонасосные установки
Холодильные и теплонасосные установки Солнечные источники энергии. Солнечные батареи
Солнечные источники энергии. Солнечные батареи Управляемый термоядерный синтез (УТС)
Управляемый термоядерный синтез (УТС) Электрический ток
Электрический ток Механические волны
Механические волны Резка металла
Резка металла Корабельные энергетические установки. Лекция 1.2
Корабельные энергетические установки. Лекция 1.2 Физические величины. Измерение физических величин 7 класс
Физические величины. Измерение физических величин 7 класс Автокөліктерді жөндеу технологиясы
Автокөліктерді жөндеу технологиясы Нефть, газ, их состав и физические свойства. Основные гипотезы происхождения нефти и газа
Нефть, газ, их состав и физические свойства. Основные гипотезы происхождения нефти и газа Электротехника и электроника. Трехфазные электрические цепи. (Лекция 8)
Электротехника и электроника. Трехфазные электрические цепи. (Лекция 8) Электрическое поле. Напряжённость электрического поля
Электрическое поле. Напряжённость электрического поля История создания швейной машинки
История создания швейной машинки Группы и определения эксплуатационных свойств
Группы и определения эксплуатационных свойств Поверхностное натяжение жидкости. Поверхностная энергия. Коэффициент поверхностного натяжения
Поверхностное натяжение жидкости. Поверхностная энергия. Коэффициент поверхностного натяжения Базові шасі техніки зв’язку. Особливості будови автомобіля КРАЗ
Базові шасі техніки зв’язку. Особливості будови автомобіля КРАЗ Зеркальные антенны. Лекция №18. АФУ
Зеркальные антенны. Лекция №18. АФУ