- Утворення і класифікація механізмів

Содержание
- 2. 2 1. Утворення механізмів Одна ланка не може бути механізмом. Дві ланки, з яких одна нерухома
- 3. 3 До ланки 1 початкового механізму обертального руху (рис. 2, а) за допомогою обертальної кінематичної пари
- 4. 4 Приєднаємо такий кінематичний ланцюг з W=0 до початкового механізму обертального руху (рис. 3). Отримаємо шарнірний
- 5. 5 2. Структурні групи та їх класифікація Структурна група або група Ассура – це найпростіший кінематичний
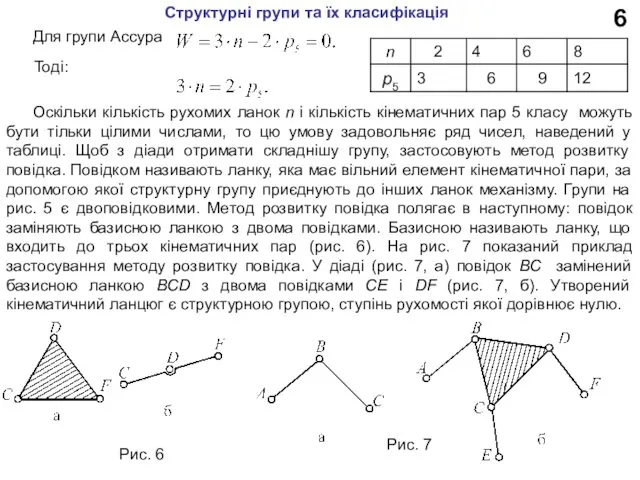
- 6. 6 Для групи Ассура Структурні групи та їх класифікація Тоді: Оскільки кількість рухомих ланок n і
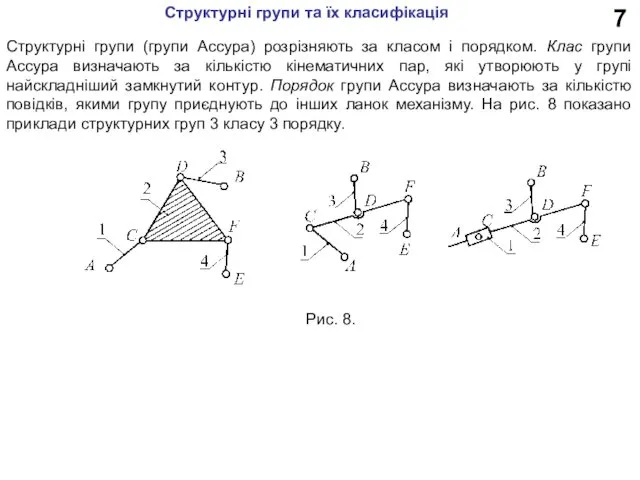
- 7. 7 Структурні групи (групи Ассура) розрізняють за класом і порядком. Клас групи Ассура визначають за кількістю
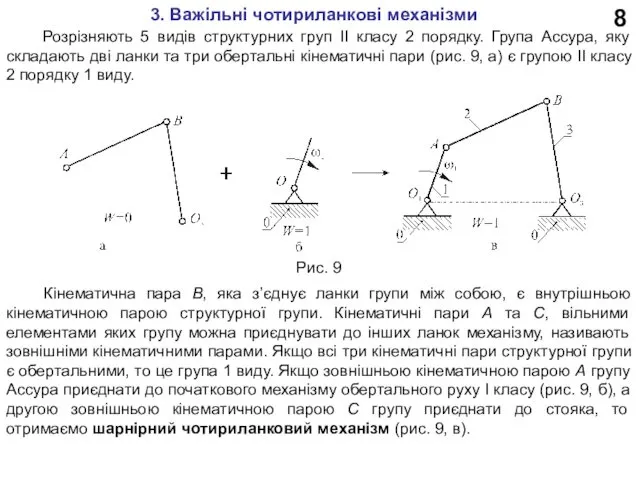
- 8. 8 3. Важільні чотириланкові механізми Розрізняють 5 видів структурних груп II класу 2 порядку. Група Ассура,
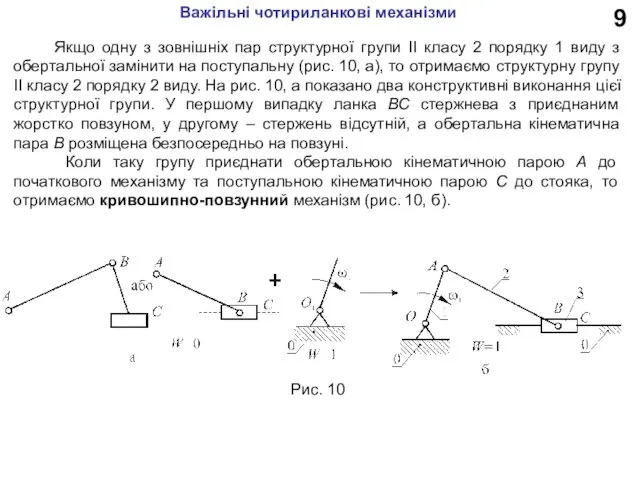
- 9. 9 Важільні чотириланкові механізми Якщо одну з зовнішніх пар структурної групи II класу 2 порядку 1
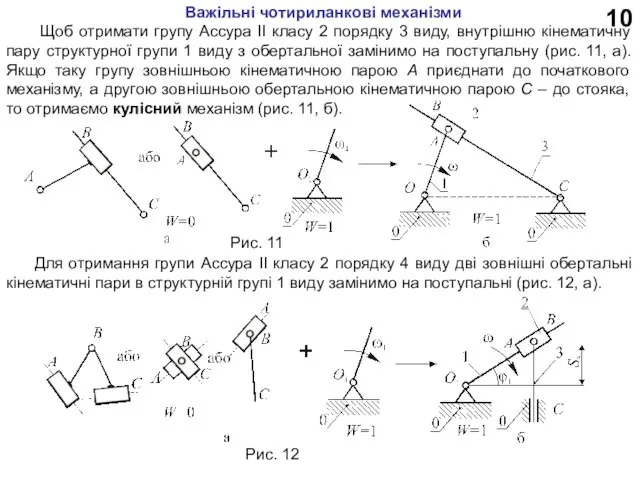
- 10. 10 Щоб отримати групу Ассура II класу 2 порядку 3 виду, внутрішню кінематичну пару структурної групи
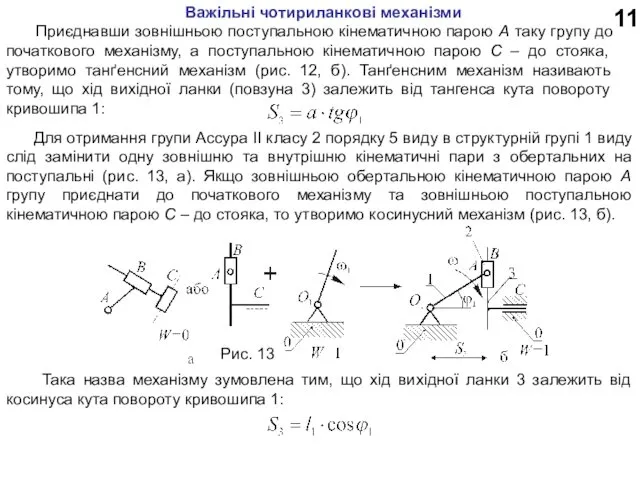
- 11. 11 Для отримання групи Ассура II класу 2 порядку 5 виду в структурній групі 1 виду
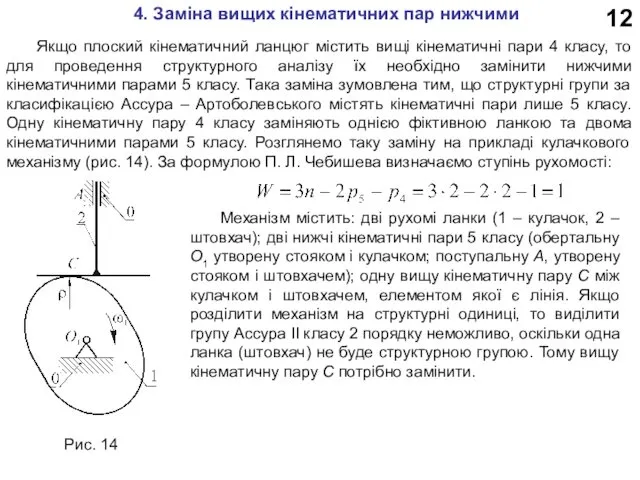
- 12. 12 Якщо плоский кінематичний ланцюг містить вищі кінематичні пари 4 класу, то для проведення структурного аналізу
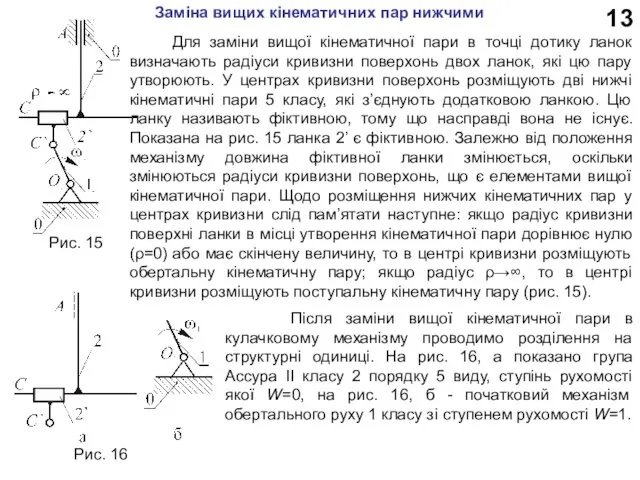
- 13. 13 Для заміни вищої кінематичної пари в точці дотику ланок визначають радіуси кривизни поверхонь двох ланок,
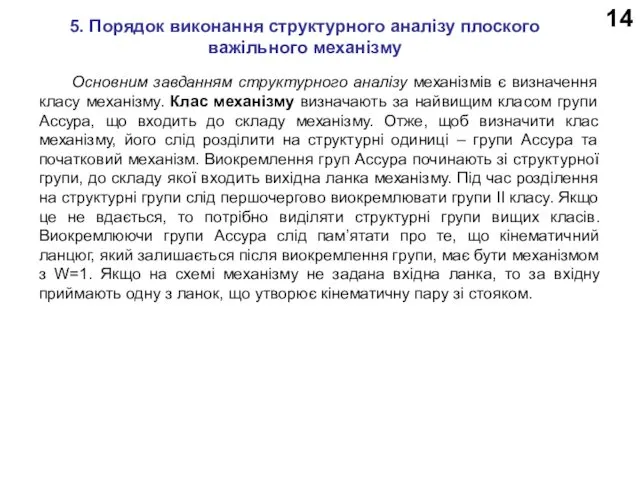
- 14. 14 Основним завданням структурного аналізу механізмів є визначення класу механізму. Клас механізму визначають за найвищим класом
- 16. Скачать презентацию
2
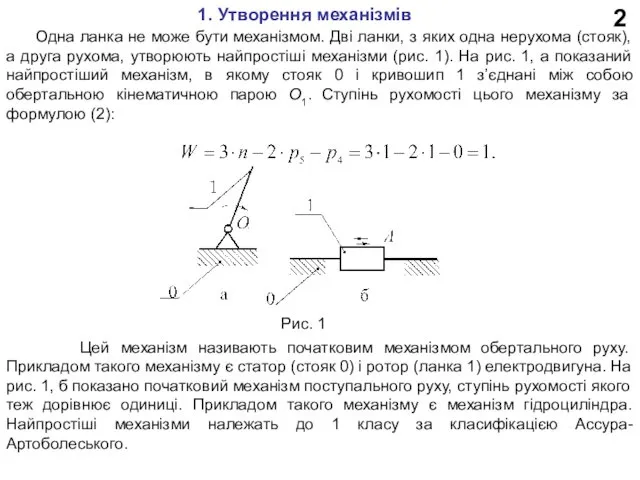
1. Утворення механізмів
Одна ланка не може бути механізмом. Дві ланки,
2
1. Утворення механізмів
Одна ланка не може бути механізмом. Дві ланки,
3
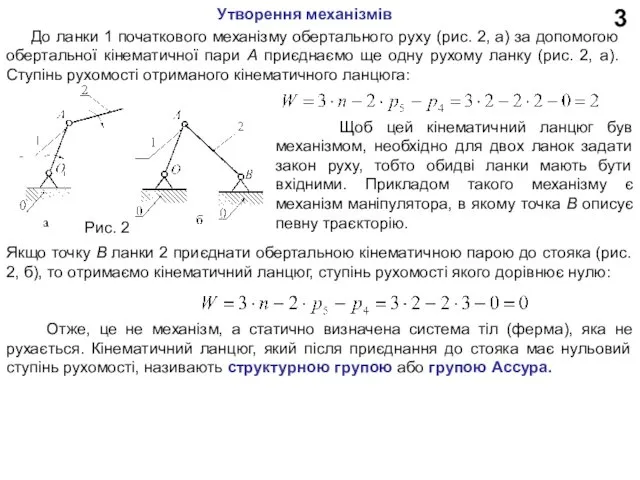
До ланки 1 початкового механізму обертального руху (рис. 2, а)
3
До ланки 1 початкового механізму обертального руху (рис. 2, а)
4
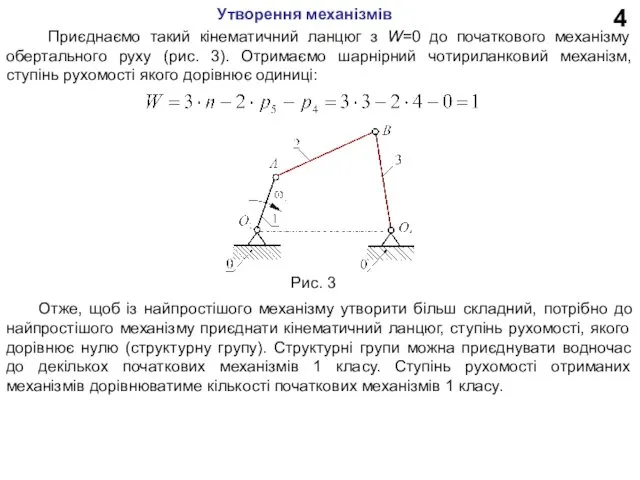
Приєднаємо такий кінематичний ланцюг з W=0 до початкового механізму обертального
4
Приєднаємо такий кінематичний ланцюг з W=0 до початкового механізму обертального
5
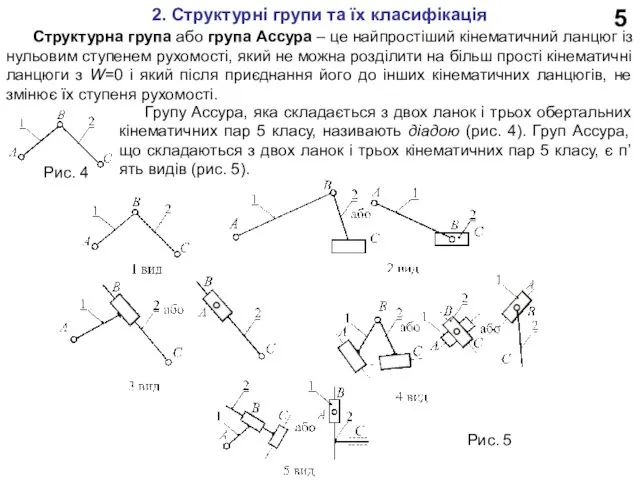
2. Структурні групи та їх класифікація
Структурна група або група Ассура
5
2. Структурні групи та їх класифікація
Структурна група або група Ассура
6
Для групи Ассура
Структурні групи та їх класифікація
Тоді:
Оскільки кількість
6
Для групи Ассура
Структурні групи та їх класифікація
Тоді:
Оскільки кількість
7
Структурні групи (групи Ассура) розрізняють за класом і порядком. Клас групи
7
Структурні групи (групи Ассура) розрізняють за класом і порядком. Клас групи
8
3. Важільні чотириланкові механізми
Розрізняють 5 видів структурних груп II
8
3. Важільні чотириланкові механізми
Розрізняють 5 видів структурних груп II
9
Важільні чотириланкові механізми
Якщо одну з зовнішніх пар структурної групи II
9
Важільні чотириланкові механізми
Якщо одну з зовнішніх пар структурної групи II
10
Щоб отримати групу Ассура II класу 2 порядку 3 виду,
10
Щоб отримати групу Ассура II класу 2 порядку 3 виду,
11
Для отримання групи Ассура II класу 2 порядку 5 виду
11
Для отримання групи Ассура II класу 2 порядку 5 виду
12
Якщо плоский кінематичний ланцюг містить вищі кінематичні пари 4 класу,
12
Якщо плоский кінематичний ланцюг містить вищі кінематичні пари 4 класу,
13
Для заміни вищої кінематичної пари в точці дотику ланок визначають
13
Для заміни вищої кінематичної пари в точці дотику ланок визначають
14
Основним завданням структурного аналізу механізмів є визначення класу механізму. Клас
14
Основним завданням структурного аналізу механізмів є визначення класу механізму. Клас
 Электронно-лучевой осциллограф
Электронно-лучевой осциллограф Физический диктант. 8 класс
Физический диктант. 8 класс Электрический ток в газах
Электрический ток в газах квантовая физика
квантовая физика Лампа накаливания
Лампа накаливания Работа, кинетическая энергия
Работа, кинетическая энергия Презентация для урока по теме Изопроцессы в газах
Презентация для урока по теме Изопроцессы в газах Управляемый термоядерный синтез
Управляемый термоядерный синтез Хронология основных открытий в области квантовой механики, атомной и ядерной физики
Хронология основных открытий в области квантовой механики, атомной и ядерной физики Механічний рух. Відносність руху. Система відліку. Матеріальна точка. Траєкторія. Шлях. Переміщення
Механічний рух. Відносність руху. Система відліку. Матеріальна точка. Траєкторія. Шлях. Переміщення Расчёт коэффициента теплоотдачи с наружной стенки для лабораторного стенда при заданных условиях
Расчёт коэффициента теплоотдачи с наружной стенки для лабораторного стенда при заданных условиях Изопроцессы. 10 класс
Изопроцессы. 10 класс Презентация Ядерный реактор
Презентация Ядерный реактор Резьбовые соединения
Резьбовые соединения Измерение углов призм и клиньев на гониометре и оптической скамье. Измерение погрешностей прямоугольных призм
Измерение углов призм и клиньев на гониометре и оптической скамье. Измерение погрешностей прямоугольных призм Бытовая швейная машина. Правила техники безопасности при работе на швейной машине. 5 класс
Бытовая швейная машина. Правила техники безопасности при работе на швейной машине. 5 класс Разработка цифрового устройства для измерения технологических переменных электролизной лабораторной установки
Разработка цифрового устройства для измерения технологических переменных электролизной лабораторной установки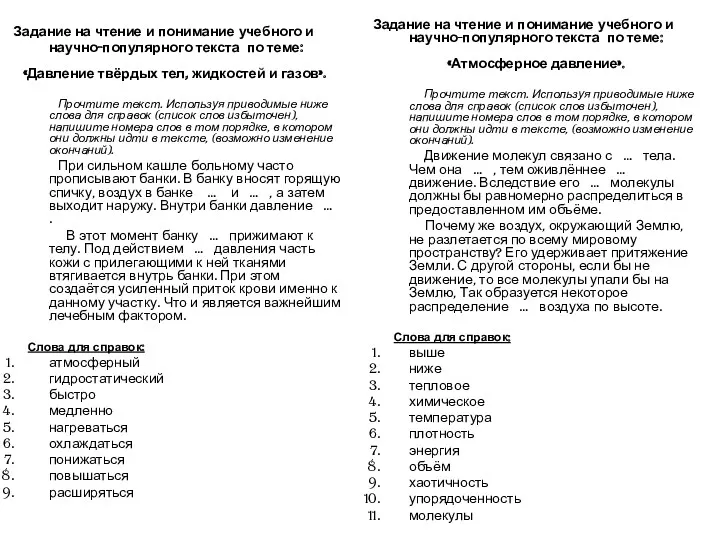 7 класс.Задания по физике на чтение и понимание учебного и научно-популярного текста по темам: Строение атома,Давление твёрдых тел, жидкостей и газов,Атмосферное давление,Энергия.
7 класс.Задания по физике на чтение и понимание учебного и научно-популярного текста по темам: Строение атома,Давление твёрдых тел, жидкостей и газов,Атмосферное давление,Энергия. Нестационарная теплопроводность неограниченной пластины. (Лекция 7)
Нестационарная теплопроводность неограниченной пластины. (Лекция 7) Виды излучений
Виды излучений Работа Электрического тока
Работа Электрического тока Механика. Механическое движение
Механика. Механическое движение Физика в картинках
Физика в картинках Лекция о работе с рациями
Лекция о работе с рациями Импульс. Законы изменения и сохранения импульса. Реактивное движение
Импульс. Законы изменения и сохранения импульса. Реактивное движение Разработка урока по теме Изучение колебаний математического маятника
Разработка урока по теме Изучение колебаний математического маятника Структурный анализ механизмов
Структурный анализ механизмов Мини катушка Тесла своими руками
Мини катушка Тесла своими руками