- Авиагоризонты и гировертикали. Гировертикали с силовой гироскопической стабилизацией

Содержание
- 2. 8. Сравнительный анализ авиагоризонтов и гировертикалей 18 Гировертикали, или авиагоризонты, представляют собой гироскопические устройства, предназначенные для
- 3. 8. Сравнительный анализ авиагоризонтов и гировертикалей 17 Нагрузка осей рам подвеса гироскопа приводит к значительному понижению
- 4. 9. Принцип действия силовой гироскопической стабилизации На борту ВС имеется ряд устройств, требующих стабилизации заданного углового
- 5. 9. Принцип действия силовой гироскопической стабилизации Классификация. Гироскопические стабилизаторы (ГС), применяемые на ЛА, могут классифицироваться по
- 6. 9. Принцип действия силовой гироскопической стабилизации В ГС непосредственного типа стабилизация осуществля-ется за счет моментов гироскопической
- 7. 9. Принцип действия силовой гироскопической стабилизации 13 Одноосные гиростабилизаторы непосредственного типа (ГС НТ) В ГС НТ
- 8. 9. Принцип действия силовой гироскопической стабилизации 12 Одноосные гиростабилизаторы непосредственного типа (ГС НТ) Режим стабилизации. При
- 9. 9. Принцип действия силовой гироскопической стабилизации 11 Одноосные гиростабилизаторы непосредственного типа (ГС НТ) Режим стабилизации. Таким
- 10. 9. Принцип действия силовой гироскопической стабилизации 10 Одноосные гиростабилизаторы непосредственного типа (ГС НТ) Режим коррекции. Коррекция
- 11. 9. Принцип действия силовой гироскопической стабилизации 9 Одноосные гиростабилизаторы непосредственного типа (ГС НТ) Режим коррекции. При
- 12. 9. Принцип действия силовой гироскопической стабилизации 8 Одноосные гиростабилизаторы непосредственного типа (ГС НТ) Режим коррекции. При
- 13. 9. Принцип действия силовой гироскопической стабилизации 7 Одноосные гиростабилизаторы силового типа (ГС СТ) Существенное ограничение ГС
- 14. 3.2. Гиростабилизаторы 6 Одноосные гиростабилизаторы силового типа (ГС СТ) При приложении к внешней раме момента внешних
- 15. 9. Принцип действия силовой гироскопической стабилизации 5 Одноосные гиростабилизаторы силового типа (ГС СТ) В результате внешняя
- 16. 9. Принцип действия силовой гироскопической стабилизации 4 Одноосные гиростабилизаторы силового типа (ГС СТ) Процесс этот продолжается
- 17. 9. Принцип действия силовой гироскопической стабилизации 3 Одноосные гиростабилизаторы силового типа (ГС СТ) Внешняя рама при
- 18. 9. Принцип действия силовой гироскопической стабилизации 2 Одноосные гиростабилизаторы силового типа (ГС СТ) Режим стабилизации. Главные
- 20. Скачать презентацию
 Федеративная республика Германия
Федеративная республика Германия Геофизические методы оценки напряженного состояния пород. Лекция 11
Геофизические методы оценки напряженного состояния пород. Лекция 11 Города России. Урбанизация
Города России. Урбанизация Ауадағы газдар қатынасының маңызы
Ауадағы газдар қатынасының маңызы Атмосферное давление. Измерение атмосферного давления
Атмосферное давление. Измерение атмосферного давления Аргентина
Аргентина Моря, озера и реки России - 4 класс
Моря, озера и реки России - 4 класс Географическое положение Африки
Географическое положение Африки Мемлекеттің жалпы мінездемесі Қытай
Мемлекеттің жалпы мінездемесі Қытай Статево-віковий склад населення світу й України. Тривалість життя. Демографічна політика
Статево-віковий склад населення світу й України. Тривалість життя. Демографічна політика Условные знаки
Условные знаки Structura populaţiei
Structura populaţiei Достопримечательности Украины
Достопримечательности Украины Путешествие по гидросфере
Путешествие по гидросфере Геологические процессы
Геологические процессы Географическое положение России
Географическое положение России Чили
Чили Горные породы и минералы
Горные породы и минералы Hungarian soft powers
Hungarian soft powers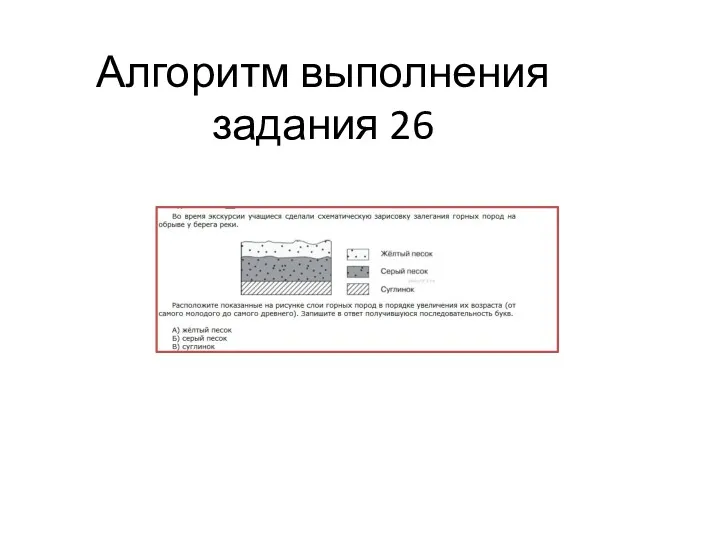 Алгоритм выполнения задания 26
Алгоритм выполнения задания 26 Планы местности и их чтение
Планы местности и их чтение Предмет и задачи курса Территориальная организация населения
Предмет и задачи курса Территориальная организация населения Метеорологические величины. Лекция 6
Метеорологические величины. Лекция 6 Себеж
Себеж Пищевая и легкая промышленности
Пищевая и легкая промышленности Народы, языки и религии
Народы, языки и религии Australia
Australia Національний парк Єллоустоун
Національний парк Єллоустоун