- Авиагоризонты и гировертикали. Особенности конструкции гировертикалей

Содержание
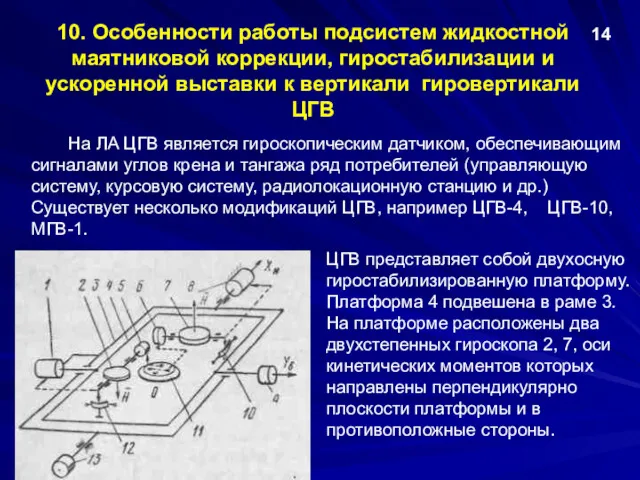
- 2. 10. Особенности работы подсистем жидкостной маятниковой коррекции, гиростабилизации и ускоренной выставки к вертикали гировертикали ЦГВ 14
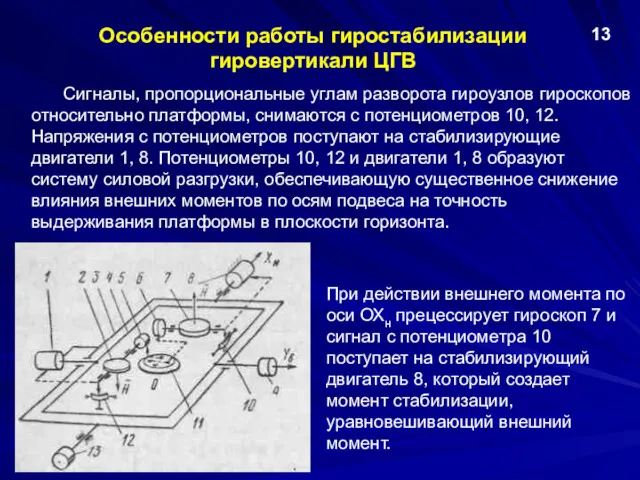
- 3. Особенности работы гиростабилизации гировертикали ЦГВ 13 Сигналы, пропорциональные углам разворота гироузлов гироскопов относительно платформы, снимаются с
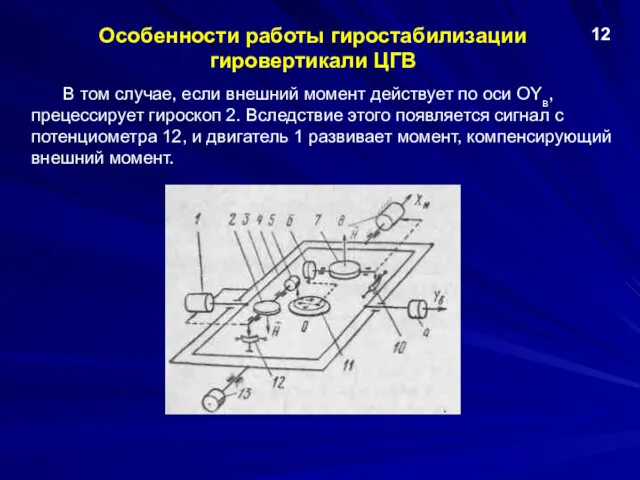
- 4. Особенности работы гиростабилизации гировертикали ЦГВ 12 В том случае, если внешний момент действует по оси ОYв,
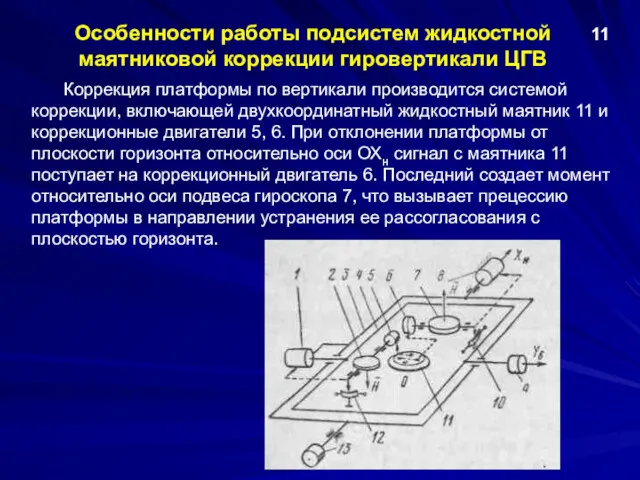
- 5. Особенности работы подсистем жидкостной маятниковой коррекции гировертикали ЦГВ 11 Коррекция платформы по вертикали производится системой коррекции,
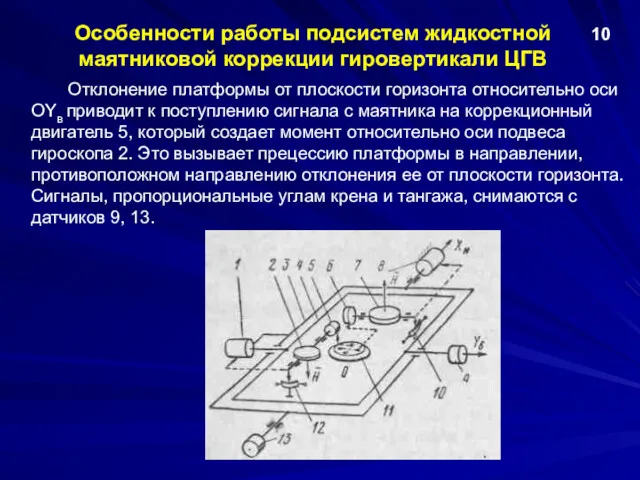
- 6. Особенности работы подсистем жидкостной маятниковой коррекции гировертикали ЦГВ 10 Отклонение платформы от плоскости горизонта относительно оси
- 7. Особенности и ускоренной выставки к вертикали гировертикали ЦГВ 9 ЦГВ представляет собой двухосную гиростабилизированную платформу. Платформа
- 8. Особенности и ускоренной выставки к вертикали гировертикали ЦГВ 8 Элементы схемы ЦГВ образуют три системы: -
- 9. Особенности и ускоренной выставки к вертикали гировертикали ЦГВ 7 ЦГВ не имеет арретирующего устройства и, следовательно,
- 10. Особенности и ускоренной выставки к вертикали гировертикали ЦГВ 6 Под действием момента, создаваемого двигателем 12, гироскоп
- 11. 10. Особенности работы подсистем жидкостной маятниковой коррекции, гиростабилизации и ускоренной выставки к вертикали гировертикали МГВ Сигналы,
- 12. Особенности работы гиростабилизации гировертикали МГВ Потенциометры Дуμ , ДУσ и двигатели ДСz и ДСх образуют систему
- 13. Особенности работы подсистем жидкостной маятниковой коррекции МГВ Положение платформы в плоскости горизонта корректируется системой коррекции, включающей
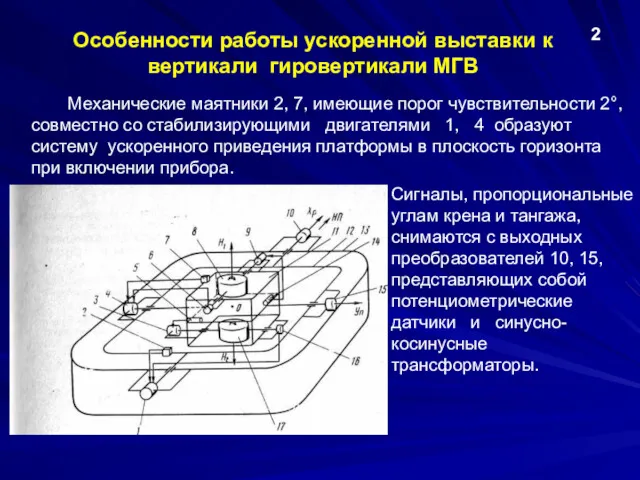
- 14. Особенности работы ускоренной выставки к вертикали гировертикали МГВ 2 Механические маятники 2, 7, имеющие порог чувствительности
- 15. Особенности контроля работоспособности МГВ 1 Техническое состояние гировертикалей в лабораторных условиях проверяется путем контроля: времени готовности;
- 16. Структурно-кинематическая схема МГВ-1
- 18. Скачать презентацию
10. Особенности работы подсистем жидкостной маятниковой коррекции, гиростабилизации и ускоренной выставки
10. Особенности работы подсистем жидкостной маятниковой коррекции, гиростабилизации и ускоренной выставки
Особенности работы гиростабилизации гировертикали ЦГВ
13
Сигналы, пропорциональные углам разворота гироузлов гироскопов относительно
Особенности работы гиростабилизации гировертикали ЦГВ
13
Сигналы, пропорциональные углам разворота гироузлов гироскопов относительно
Особенности работы гиростабилизации гировертикали ЦГВ
12
В том случае, если внешний момент действует
Особенности работы гиростабилизации гировертикали ЦГВ
12
В том случае, если внешний момент действует
Особенности работы подсистем жидкостной маятниковой коррекции гировертикали ЦГВ
11
Коррекция платформы по вертикали
Особенности работы подсистем жидкостной маятниковой коррекции гировертикали ЦГВ
11
Коррекция платформы по вертикали
Особенности работы подсистем жидкостной маятниковой коррекции гировертикали ЦГВ
10
Отклонение платформы от
Особенности работы подсистем жидкостной маятниковой коррекции гировертикали ЦГВ
10
Отклонение платформы от

Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
9
ЦГВ представляет собой двухосную
Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
9
ЦГВ представляет собой двухосную

Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
8
Элементы схемы ЦГВ образуют
Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
8
Элементы схемы ЦГВ образуют

Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
7
ЦГВ не имеет арретирующего
Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
7
ЦГВ не имеет арретирующего

Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
6
Под действием момента, создаваемого
Особенности и ускоренной выставки к вертикали гировертикали ЦГВ
6
Под действием момента, создаваемого

10. Особенности работы подсистем жидкостной маятниковой коррекции, гиростабилизации и ускоренной выставки
10. Особенности работы подсистем жидкостной маятниковой коррекции, гиростабилизации и ускоренной выставки

Особенности работы гиростабилизации гировертикали МГВ
Потенциометры Дуμ , ДУσ и двигатели ДСz
Особенности работы гиростабилизации гировертикали МГВ
Потенциометры Дуμ , ДУσ и двигатели ДСz

Особенности работы подсистем жидкостной маятниковой коррекции МГВ
Положение платформы в плоскости горизонта
Особенности работы подсистем жидкостной маятниковой коррекции МГВ
Положение платформы в плоскости горизонта
Особенности работы ускоренной выставки к вертикали гировертикали МГВ
2
Механические маятники 2,
Особенности работы ускоренной выставки к вертикали гировертикали МГВ
2
Механические маятники 2,

Особенности контроля работоспособности МГВ
1
Техническое состояние гировертикалей в лабораторных условиях проверяется
Особенности контроля работоспособности МГВ
1
Техническое состояние гировертикалей в лабораторных условиях проверяется

Структурно-кинематическая схема МГВ-1
Структурно-кинематическая схема МГВ-1
 Факторы формирования климата Африки. Климатические пояса и типичные для них погоды
Факторы формирования климата Африки. Климатические пояса и типичные для них погоды Использование алгоритма построения профиля рельефа местности
Использование алгоритма построения профиля рельефа местности Поход по Хребту Рудянский Спой, Усьвенским столбам, Каменному Городу 2016
Поход по Хребту Рудянский Спой, Усьвенским столбам, Каменному Городу 2016 Республіка Гондурас
Республіка Гондурас Рекреационные ресурсы
Рекреационные ресурсы Политическое устройство мира
Политическое устройство мира Викторина. Калининградская область
Викторина. Калининградская область Географическое положение и особенности природы южных материков. 7 класс
Географическое положение и особенности природы южных материков. 7 класс Разграфка и номенклатура топографических карт
Разграфка и номенклатура топографических карт Экономика Москвы и Московской области
Экономика Москвы и Московской области Государство Германия
Государство Германия Народ Европы
Народ Европы География мировых природных ресурсов. 10 класс
География мировых природных ресурсов. 10 класс Обобщение по теме Гидросфера
Обобщение по теме Гидросфера Мы знакомимся с Прикамьем: “Поход на Помяненный камень”
Мы знакомимся с Прикамьем: “Поход на Помяненный камень” Карпатський біосферний заповідник
Карпатський біосферний заповідник Страны СНГ
Страны СНГ Hawaii. Hawaiian Islands
Hawaii. Hawaiian Islands Черная и цветная металлургия
Черная и цветная металлургия Лесные зоны России. 8 класс
Лесные зоны России. 8 класс Новая Зеландия
Новая Зеландия Озеро Увильды
Озеро Увильды Водохранилища: плюсы и минусы
Водохранилища: плюсы и минусы Сравнительная характеристика экономических районов Сибири
Сравнительная характеристика экономических районов Сибири Национальный парк ”Зюраткуль
Национальный парк ”Зюраткуль Штат Кестесі
Штат Кестесі Розвиток судноплавства та повітроплавання
Розвиток судноплавства та повітроплавання Поверхностые водоемы Республики Казахстан
Поверхностые водоемы Республики Казахстан