- Диференційований залік з вiйскової топографії

Содержание
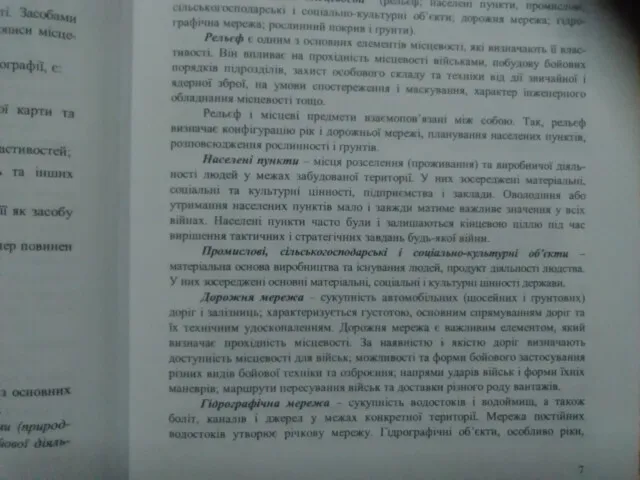
- 8. 2 рівень 1.Назвіть і розкрийте топографічні елементи місцевості Топографічні елементи - населені пункти Промислові , сільськогосподарські
- 11. 2.Вкажіть і розкрийте тактичні властивості місцевості Прохідність місцевості-це властивість яка визначає можливість руху по ній о/с
- 12. 3.Розкрийте способи вимірювання кутів на місцевості приладами прицілювання (баштовим кутоміром); приладами спостереження (біноклем); лінійкою з міліметровими
- 13. Кругова шкала (лімб) 2 поділена на 120 поділок, ціна поділки – 3°. Шкала має подвійну оцифровку:
- 14. Вимірювання за допомогою підручних засобів Кутові розміри предметів Предмет Розміри в тисячних Олівець простий (діаметр) 0-15
- 15. 4.Розкрийте способи вимірювання відстаней на місцевості Вимірювання віддалей Окомірне визначення віддалі Визначення віддалі за даними спідометра
- 16. 2)Визначення віддалей за даними спідометра D = №2 - №1 3)Визначення віддалі за часом і середньою
- 17. 5)За лінійними та кутовими розмірами предметів 7)Визначення віддалі за звуком і спалахом D = 330 х
- 18. 6)Визначення віддалі за лінійними та кутовими розмірами предметів Формула тисячних: Д = (ℓ ∕ n)×1000 ℓ
- 19. 7)Визначення віддалі за почутим звуком Об’єкт і характер звука Віддаль чутності, км Тиха розмова, заряджання зброї
- 21. 5.Розкрийте сутність та наведіть приклад топографічного орієнтування на місцевості Орієнтування на місцевості в бойових умовах –
- 22. Порядок проведення топографічного орієнтування 1.Показати сторони горизонту і визначити орієнтири. 2.Показати своє місцезнаходження відносно орієнтирів, позначених
- 23. 6.Розкрийте порядок визначення сторін горизонту різними способами Визначення сторін горизонту - Компасом; - За небесними світилами;
- 24. Визначення сторін горизонту компасом
- 25. Визначення сторін горизонту за небесними світилами За Сонцем і годинником
- 26. Як знайти Полярну зірку
- 27. Визначення сторін горизонту за ознаками місцевих предметів
- 28. 7. Розкрийте послідовність руху за азимутами
- 29. 8.Розкрийте головні вимоги до картографічного зображення Масштабність , тобто сувора відповідність розмірів картографічного зображення місцевості ,
- 30. 9.Розкрийте способи вимірювання вертикальних кутів за допомогою ПАБ-2А Вимірювання вертикальних кутових відстаней між двома точками у
- 31. На відліковій шайбі нанесені поділки з ціною 1-00, по три поділки для відліків вверх і вниз
- 32. 10.Розкрийте порядок роботи з апаратурою ТНА-3 Використання навігаційної апаратури являє собою комплекс дій і операцій, що
- 33. Підготовка ТНА-3 до роботи та введення вихідних даних Підготовка ТНА-3 включає: попередню перевірку та настроювання; визначення
- 34. 1. підготовка вихідних даних 2. початкове орієнтування об'єкта 3. введення вихідних даних 4. робота з навігаційною
- 35. Підготовка вихідних даних Визначення прямокутних координат вихідного пункту Хвп та Yвп Визначеня координат пункту призначення Хпп
- 36. Початкове орієнтування за картою використовується в тому випадку коли на місцевості є орієнтири, що зазначені на
- 37. Початкове орієнтування за картою αосі = αор - βвіз якщо αор >βвіз, αосі = 60-00 +
- 38. На пульті управління: перевірити положення шкали ШИРОТА і за необхідності встановити її відповідно до широти місця
- 39. На координаторі: - встановити перемикач РАБОТА-КОНТРОЛЬ на лицьовій панелі координатора в положення РАБОТА; - встановити шкалу
- 40. Після попередньої перевірки та настроювання і визначення вихідних даних увімкнути апаратуру, для чого встановити вимикач СИСТЕМА
- 41. На лічильниках X та Y встановити координати вихідного пункту за допомогою ручки і ричажків розміщених на
- 42. Після вводу в систему Хвих, Yвих, ΔХ, ΔY на шкалах грубого відліку автоматично встановлюється вихідний дирекційний
- 43. Вихідний дирекційний кут машини αвих вводиться ручкою по шкалам КУРС грубого відліку (ГО) і точного відліку
- 44. вмикати апаратуру під час руху об'єкта; відключати живлення при роботі з апаратурою в об'єкті (для збереження
- 45. 11.Розкрийте класифікацію та призначення топографічних карт України
- 46. Класифікація топографічних карт
- 47. 12. Розкрийте суть розграфки масштабного ряду топографічних карт України Розграфлення карт - це система поділу аркуша
- 48. 13. Розкрийте види умовних топографічних знаків та головні вимоги , які пред’являють до них Топографічними умовними
- 49. Види умовних знаків Залежно від властивостей та призначення умовні знаки місцевих предметів поділяють на: - масштабні;
- 50. Позамасштабними (точковими) знаками називають топографічні умовні знаки, які використовуються для зображення об’єктів, які за своїми розмірами
- 51. 14. Розкрийте суть зображення рельєфу горизонталями та основні типові форми рельєфу Рельєф – це сукупність нерівностей
- 52. Горизонталь – замкнена крива лінія, всі точки якої розта-шовані на однаковій висоті над рівнем моря або
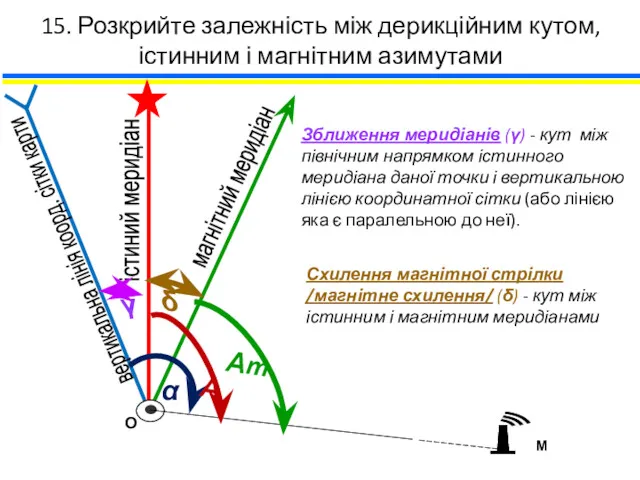
- 53. 15. Розкрийте залежність між дерикційним кутом, істинним і магнітним азимутами Зближення меридіанів (γ) - кут між
- 54. 16. Наведіть характеристику системи полярних координат Кожна система координат характеризується: - початком координат; - координатними осями
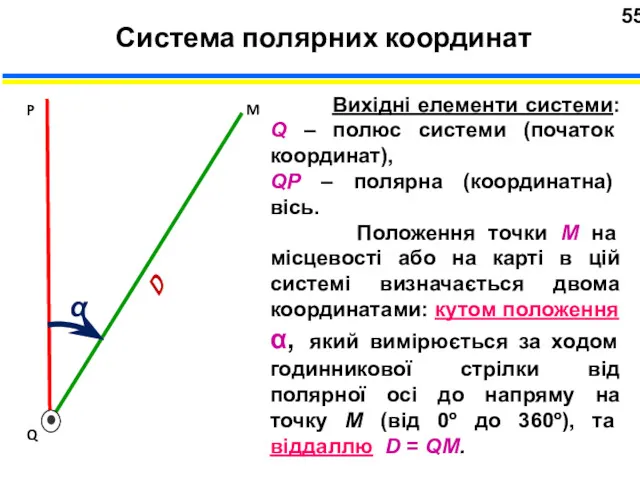
- 55. Система полярних координат Вихідні елементи системи: Q – полюс системи (початок координат), QР – полярна (координатна)
- 56. 17. Наведіть характеристику системи біполярних координат Кожна система координат характеризується: - початком координат; - координатними осями
- 57. Біполярна система координат Вихідні елементи системи: два полюси А і В та загальна вісь АВ, що
- 58. 18. Наведіть характеристику системи географічних координат Географічні координати: кутові величини - широта (В) і довгота (L),
- 59. Довгота (L) - двогранний кут, утворений площиною початкового меридіану та меридіану, який проходить через точку, координати
- 60. 19. Наведіть характеристику системи плоских прямокутних координат В поперечно-циліндрічній проекції Гаусса кожна шестиградусна зона послідовно проектується
- 61. Зміст прямокутних координат Х =3 877 000 м; Y=11 620 000 м. № зони Відстань від
- 62. 20. Дати визначення дирекційного кута , істиного і магнітного азимутів Магнітний азимут (Аm) - це кут,
- 63. - Істинний азимут (А) - це кут, який вимірюється за ходом годинникової стрілки від північного напрямку
- 64. 21. Розкрийте способи вимірювання вертикальних кутів за допомогою ПАБ-2А Дивись питання 9
- 65. 22. Розкрийте способи вимірювання дирекційних кутів та відстаней за допомогою ПАБ-2А
- 66. Порядок роботи з бусоллю при виконанні її за призначенням. Вимірювання віддалей. Віддаль на місцевості в межах
- 67. Вимірювання віддалей. - встановити бусоль на одній з двох точок, між якими визначається віддаль; - встановити
- 68. 23. Розкрийте порядок приведення ПАБ-2А в робоче положення та два способи орієнтування ПАБ-2А
- 69. Порядок приведення ПАБ в робоче положення. - відстебнути ремінь, що стягує ніжки триноги, послабити всі затискні
- 70. Порядок приведення ПАБ в робоче положення. - відкрити кришку футляра і дістати бусоль; - встановити бусоль
- 71. 24. Розкрийте порядок введення в пам’ять НАС СН3003 Базальт координат маршрутних точок в формулярі WPT, визначення
- 72. Введення маршрутних точок: - ввімкнення режиму WPT; - введення режиму номера маршрутної точки (WPT > 001);
- 73. Визначення відстані, напряму (азимута) між введеними маршрутними точками: - ввімкнення режиму WPT; - встановлення номера МТ
- 74. 25. Розкрийте особливості та призначення формулярів POS та INF у НАС СН 3003 Базальт
- 75. призначений для відображення поточних координат споживача в обраній системі координат і включення режиму управління приймачем диференціальних
- 76. призначений для діагностування апаратури тестовою системою вмонтованого контролю, а також відображення інформаційних повідомлень про кількість НКА,
- 77. 26. Розкрийте способи та загальні правила вивчення і оцінки місцевості
- 78. Способи вивчення місцевості Вивчити місцевість – визначити загальний характер даної місцевості і розкрити її тактичні властивості.
- 79. Військово-інженерні описи місцевості – узагальнені дані про місцевість, промисловість, місця зосередження будівельних матеріалів, склад населення, кліматичні
- 80. Топогеодезичне забезпечення включає в себе: - створення, оновлення топографічних карт і своєчасне їх доведення до військ
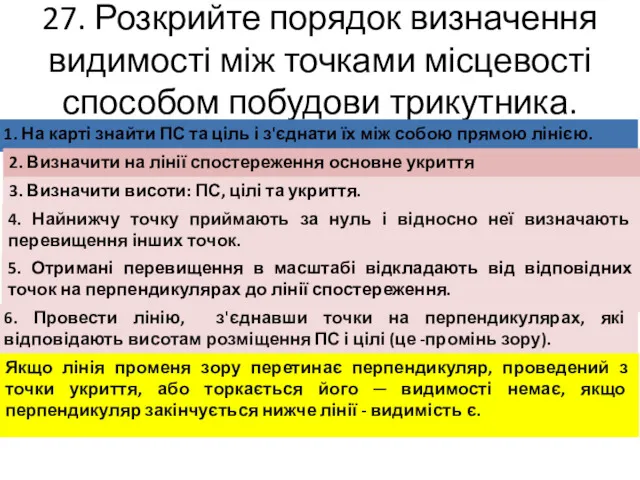
- 81. 27. Розкрийте порядок визначення видимості між точками місцевості способом побудови трикутника. 1. На карті знайти ПС
- 82. 28.Розкрийте порядок побудови профілю місцевості
- 83. Побудова профілів місцевості Профілем місцевості називають креслення, яке відображає розріз місцевості вертикальною площиною на заданому напряму.
- 84. 1. На карті прокреслити профільну лінію. 2. До профільної лінії прикласти міліметровий або розлінований аркуш паперу
- 85. 29. Що таке глибина укриття , кут місця та мертвий простір. Чим вони характеризуються , як
- 86. Глибину укриття можна визначати побудовою профілю або за формулою: h - глибина укриття, м; d1 -
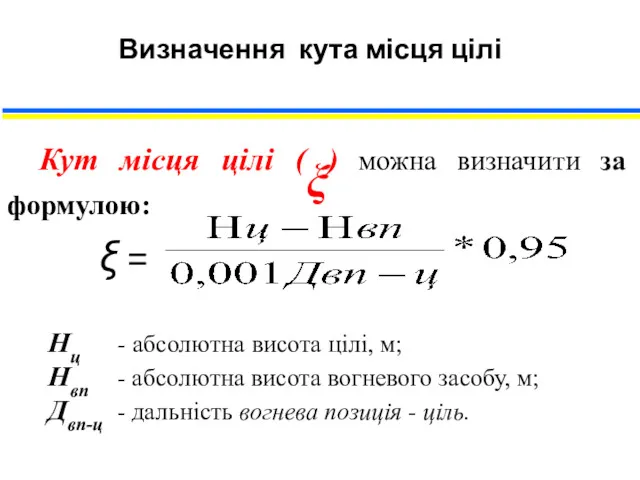
- 87. Визначення кута місця цілі Кут місця цілі (ξ) можна визначити за формулою: Нц - абсолютна висота
- 88. 30. Розкрийте порядок нанесення на карту полів невидимості 1. В секторі спостереження від пункту спостереження проводять
- 89. Визначення полів невидимості по карті. Полем невидимості називаються закриті ділянки місцевості, які не проглядаються з пунктів
- 90. Формули для вирішення 3 рівня
- 91. Перехід від дирекційного кута до магнітного азимута за формулами Аm = α − (±ΠН) α =
- 93. Скачать презентацию
2 рівень
1.Назвіть і розкрийте топографічні елементи місцевості
Топографічні елементи
- населені
2 рівень
1.Назвіть і розкрийте топографічні елементи місцевості
Топографічні елементи
- населені
2.Вкажіть і розкрийте тактичні властивості місцевості
Прохідність місцевості-це властивість яка визначає можливість
2.Вкажіть і розкрийте тактичні властивості місцевості
Прохідність місцевості-це властивість яка визначає можливість
3.Розкрийте способи вимірювання кутів на місцевості
приладами прицілювання (баштовим кутоміром);
приладами спостереження (біноклем);
3.Розкрийте способи вимірювання кутів на місцевості
приладами прицілювання (баштовим кутоміром);
приладами спостереження (біноклем);
Кругова шкала (лімб) 2 поділена на 120 поділок, ціна поділки –
Кругова шкала (лімб) 2 поділена на 120 поділок, ціна поділки –
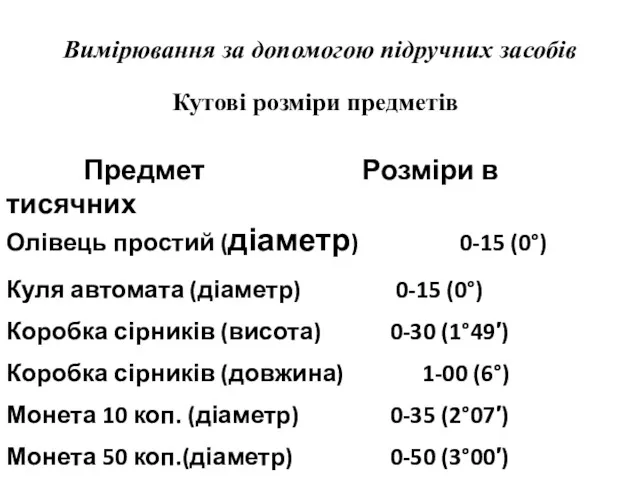
Вимірювання за допомогою підручних засобів
Кутові розміри предметів
Предмет Розміри в
Вимірювання за допомогою підручних засобів
Кутові розміри предметів
Предмет Розміри в
4.Розкрийте способи вимірювання відстаней на місцевості
Вимірювання віддалей
Окомірне визначення віддалі
Визначення
4.Розкрийте способи вимірювання відстаней на місцевості
Вимірювання віддалей
Окомірне визначення віддалі
Визначення
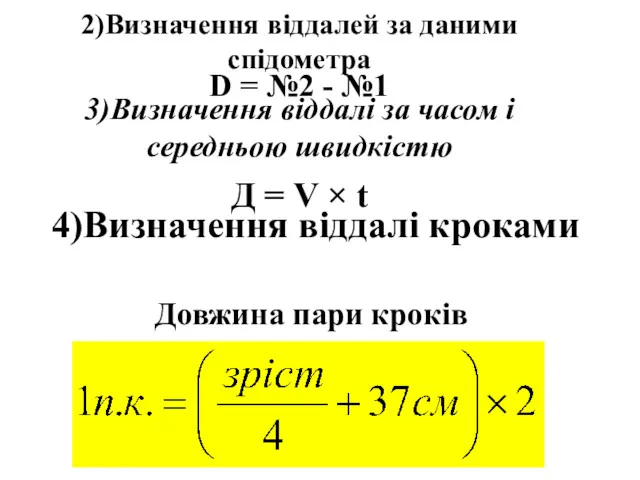
2)Визначення віддалей за даними спідометра
D = №2 - №1
3)Визначення віддалі за
2)Визначення віддалей за даними спідометра
D = №2 - №1
3)Визначення віддалі за
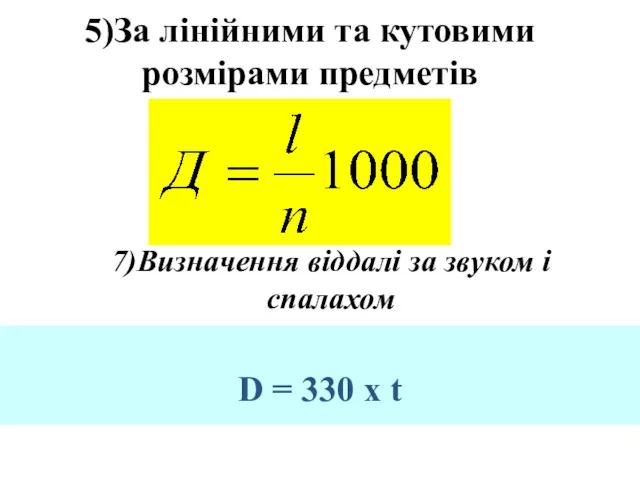
5)За лінійними та кутовими розмірами предметів
7)Визначення віддалі за звуком і спалахом
D
5)За лінійними та кутовими розмірами предметів
7)Визначення віддалі за звуком і спалахом
D
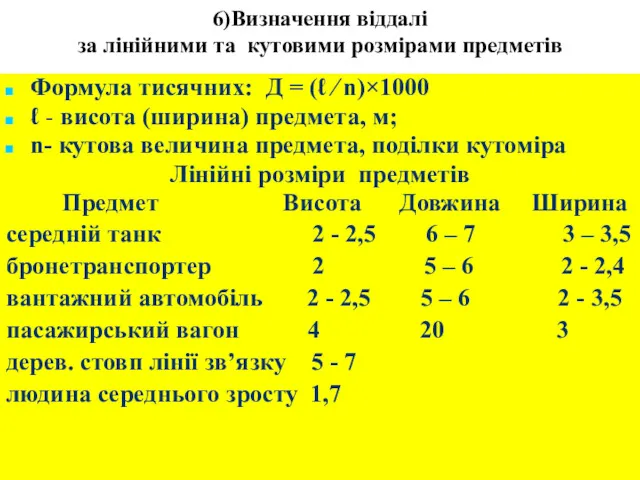
6)Визначення віддалі
за лінійними та кутовими розмірами предметів
Формула тисячних: Д =
6)Визначення віддалі
за лінійними та кутовими розмірами предметів
Формула тисячних: Д =
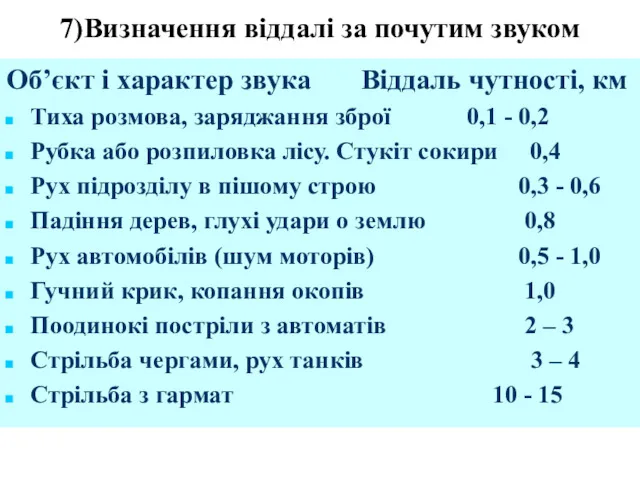
7)Визначення віддалі за почутим звуком
Об’єкт і характер звука Віддаль чутності, км
Тиха
7)Визначення віддалі за почутим звуком
Об’єкт і характер звука Віддаль чутності, км
Тиха
5.Розкрийте сутність та наведіть приклад топографічного орієнтування на місцевості
Орієнтування на місцевості
5.Розкрийте сутність та наведіть приклад топографічного орієнтування на місцевості
Орієнтування на місцевості
Порядок проведення топографічного орієнтування
1.Показати сторони горизонту і визначити орієнтири.
2.Показати своє місцезнаходження
Порядок проведення топографічного орієнтування
1.Показати сторони горизонту і визначити орієнтири.
2.Показати своє місцезнаходження
6.Розкрийте порядок визначення сторін горизонту різними способами
Визначення сторін горизонту
- Компасом;
- За
6.Розкрийте порядок визначення сторін горизонту різними способами
Визначення сторін горизонту
- Компасом;
- За
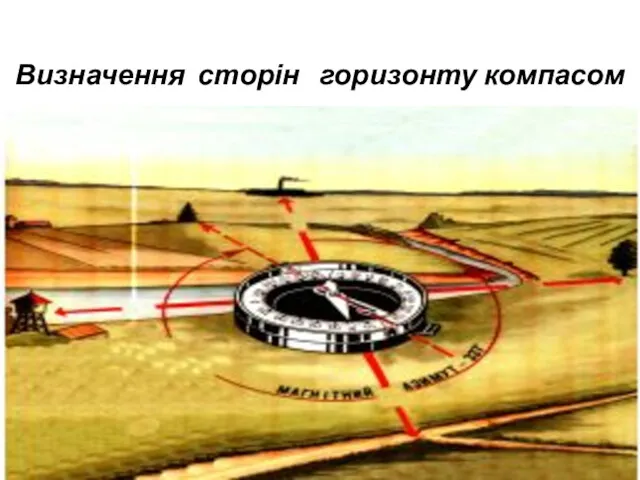
Визначення сторін горизонту компасом
Визначення сторін горизонту компасом
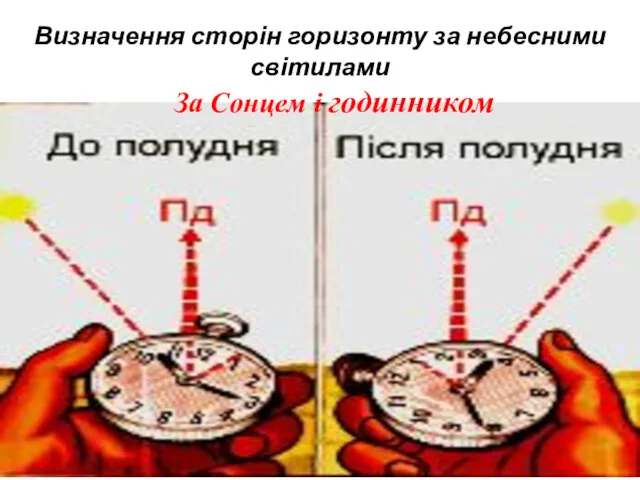
Визначення сторін горизонту за небесними світилами
За Сонцем і годинником
Визначення сторін горизонту за небесними світилами
За Сонцем і годинником
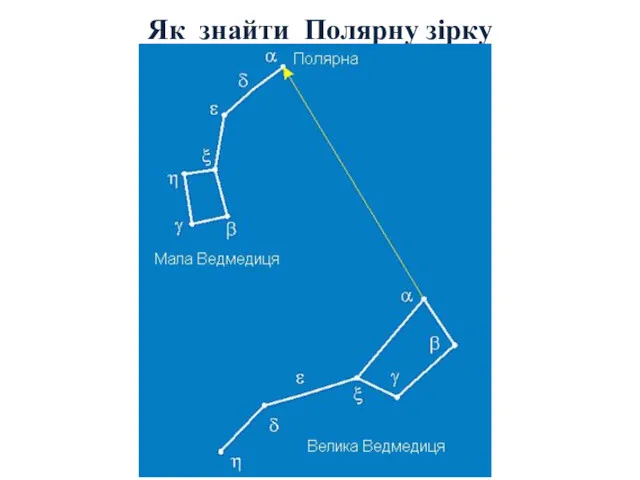
Як знайти Полярну зірку
Як знайти Полярну зірку

Визначення сторін горизонту за ознаками місцевих предметів
Визначення сторін горизонту за ознаками місцевих предметів
7. Розкрийте послідовність руху за азимутами
7. Розкрийте послідовність руху за азимутами
8.Розкрийте головні вимоги до картографічного зображення
Масштабність , тобто сувора відповідність розмірів
8.Розкрийте головні вимоги до картографічного зображення
Масштабність , тобто сувора відповідність розмірів
9.Розкрийте способи вимірювання вертикальних кутів за допомогою ПАБ-2А
Вимірювання вертикальних кутових відстаней
9.Розкрийте способи вимірювання вертикальних кутів за допомогою ПАБ-2А
Вимірювання вертикальних кутових відстаней
На відліковій шайбі нанесені поділки з ціною 1-00, по три поділки
На відліковій шайбі нанесені поділки з ціною 1-00, по три поділки
10.Розкрийте порядок роботи з апаратурою ТНА-3
Використання навігаційної апаратури являє собою комплекс
10.Розкрийте порядок роботи з апаратурою ТНА-3
Використання навігаційної апаратури являє собою комплекс
Підготовка ТНА-3 до роботи та
введення вихідних даних
Підготовка ТНА-3 включає:
попередню
Підготовка ТНА-3 до роботи та
введення вихідних даних
Підготовка ТНА-3 включає:
попередню
1. підготовка вихідних даних
2. початкове орієнтування об'єкта
3. введення вихідних даних
4. робота
2. початкове орієнтування об'єкта
3. введення вихідних даних
4. робота
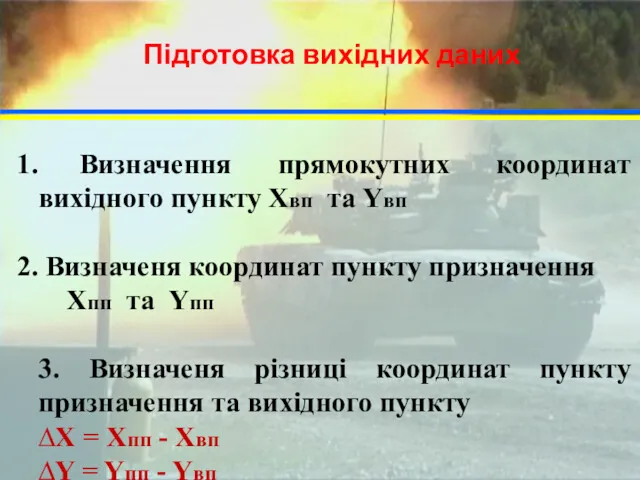
Підготовка вихідних даних
Визначення прямокутних координат вихідного пункту Хвп та Yвп
Підготовка вихідних даних
Визначення прямокутних координат вихідного пункту Хвп та Yвп
Початкове орієнтування за картою використовується в тому випадку коли на місцевості
Початкове орієнтування за картою використовується в тому випадку коли на місцевості

Початкове орієнтування за картою
αосі = αор - βвіз якщо αор >βвіз,
Початкове орієнтування за картою
αосі = αор - βвіз якщо αор >βвіз,

На пульті управління:
перевірити положення шкали ШИРОТА і за необхідності встановити її
На пульті управління:
перевірити положення шкали ШИРОТА і за необхідності встановити її

На координаторі:
- встановити перемикач РАБОТА-КОНТРОЛЬ на лицьовій панелі координатора в положення
На координаторі:
- встановити перемикач РАБОТА-КОНТРОЛЬ на лицьовій панелі координатора в положення
Після попередньої перевірки та настроювання і визначення вихідних даних увімкнути апаратуру,
Після попередньої перевірки та настроювання і визначення вихідних даних увімкнути апаратуру,
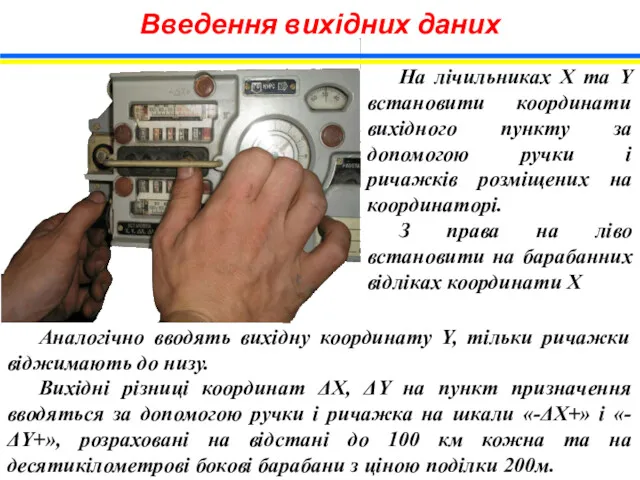
На лічильниках X та Y встановити координати вихідного пункту за допомогою
На лічильниках X та Y встановити координати вихідного пункту за допомогою
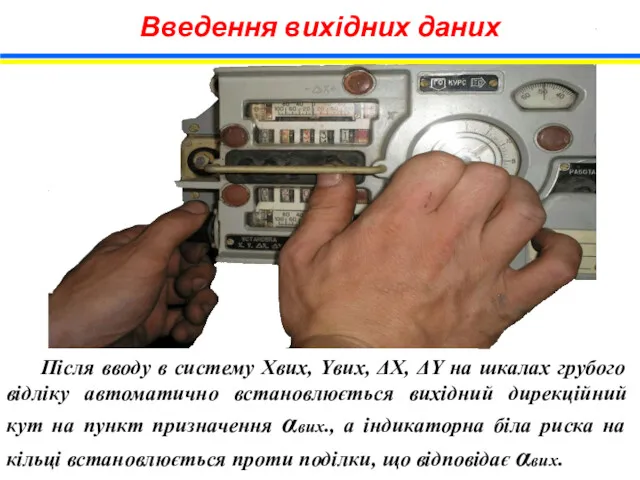
Після вводу в систему Хвих, Yвих, ΔХ, ΔY на шкалах
Після вводу в систему Хвих, Yвих, ΔХ, ΔY на шкалах

Вихідний дирекційний кут машини αвих вводиться ручкою по шкалам КУРС
Вихідний дирекційний кут машини αвих вводиться ручкою по шкалам КУРС
вмикати апаратуру під час руху об'єкта;
відключати живлення при роботі з апаратурою
вмикати апаратуру під час руху об'єкта;
відключати живлення при роботі з апаратурою
11.Розкрийте класифікацію та призначення топографічних карт України
11.Розкрийте класифікацію та призначення топографічних карт України
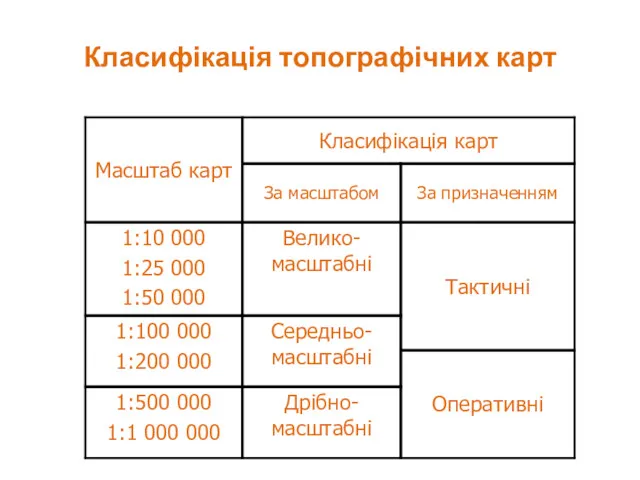
Класифікація топографічних карт
Класифікація топографічних карт
12. Розкрийте суть розграфки масштабного ряду топографічних карт України
Розграфлення карт
12. Розкрийте суть розграфки масштабного ряду топографічних карт України
Розграфлення карт
13. Розкрийте види умовних топографічних знаків та головні вимоги , які
13. Розкрийте види умовних топографічних знаків та головні вимоги , які
Види умовних знаків
Залежно від властивостей та призначення умовні знаки місцевих предметів
Види умовних знаків
Залежно від властивостей та призначення умовні знаки місцевих предметів
Позамасштабними (точковими) знаками називають топографічні умовні знаки, які використовуються для зображення
Позамасштабними (точковими) знаками називають топографічні умовні знаки, які використовуються для зображення
14. Розкрийте суть зображення рельєфу горизонталями та основні типові форми рельєфу
14. Розкрийте суть зображення рельєфу горизонталями та основні типові форми рельєфу
Горизонталь – замкнена крива лінія, всі точки якої розта-шовані на однаковій
Горизонталь – замкнена крива лінія, всі точки якої розта-шовані на однаковій
15. Розкрийте залежність між дерикційним кутом, істинним і магнітним азимутами
Зближення
15. Розкрийте залежність між дерикційним кутом, істинним і магнітним азимутами
Зближення
16. Наведіть характеристику системи полярних координат
Кожна система координат характеризується:
-
16. Наведіть характеристику системи полярних координат
Кожна система координат характеризується:
-
Система полярних координат
Вихідні елементи системи: Q – полюс системи
Система полярних координат
Вихідні елементи системи: Q – полюс системи
17. Наведіть характеристику системи біполярних координат
Кожна система координат характеризується:
-
17. Наведіть характеристику системи біполярних координат
Кожна система координат характеризується:
-

Біполярна система координат
Вихідні елементи системи: два полюси А і
Біполярна система координат
Вихідні елементи системи: два полюси А і
18. Наведіть характеристику системи географічних координат
Географічні координати: кутові величини -
18. Наведіть характеристику системи географічних координат
Географічні координати: кутові величини -
Довгота (L) - двогранний кут, утворений площиною початкового меридіану та меридіану,
Довгота (L) - двогранний кут, утворений площиною початкового меридіану та меридіану,
19. Наведіть характеристику системи плоских прямокутних координат
В поперечно-циліндрічній проекції Гаусса
19. Наведіть характеристику системи плоских прямокутних координат
В поперечно-циліндрічній проекції Гаусса
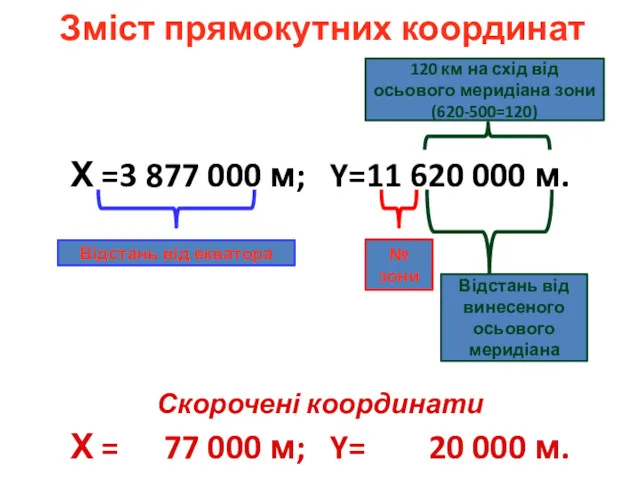
Зміст прямокутних координат
Х =3 877 000 м; Y=11 620 000 м.
№
зони
Відстань
Зміст прямокутних координат
Х =3 877 000 м; Y=11 620 000 м.
№
зони
Відстань
20. Дати визначення дирекційного кута , істиного і магнітного азимутів
Магнітний
20. Дати визначення дирекційного кута , істиного і магнітного азимутів
Магнітний
- Істинний азимут (А) - це кут, який вимірюється за ходом
- Істинний азимут (А) - це кут, який вимірюється за ходом
21. Розкрийте способи вимірювання вертикальних кутів за допомогою ПАБ-2А
Дивись питання
21. Розкрийте способи вимірювання вертикальних кутів за допомогою ПАБ-2А
Дивись питання
22. Розкрийте способи вимірювання дирекційних кутів та відстаней за допомогою ПАБ-2А
22. Розкрийте способи вимірювання дирекційних кутів та відстаней за допомогою ПАБ-2А
Порядок роботи з бусоллю при виконанні її за призначенням.
Вимірювання віддалей.
Віддаль
Порядок роботи з бусоллю при виконанні її за призначенням.
Вимірювання віддалей.
Віддаль
Вимірювання віддалей.
- встановити бусоль на одній з двох точок, між якими
Вимірювання віддалей.
- встановити бусоль на одній з двох точок, між якими
23. Розкрийте порядок приведення ПАБ-2А в робоче положення та два способи
23. Розкрийте порядок приведення ПАБ-2А в робоче положення та два способи
Порядок приведення ПАБ в робоче положення.
- відстебнути ремінь, що стягує
Порядок приведення ПАБ в робоче положення.
- відстебнути ремінь, що стягує
Порядок приведення ПАБ в робоче положення.
- відкрити кришку футляра і
Порядок приведення ПАБ в робоче положення.
- відкрити кришку футляра і
24. Розкрийте порядок введення в пам’ять НАС СН3003 Базальт координат маршрутних
24. Розкрийте порядок введення в пам’ять НАС СН3003 Базальт координат маршрутних
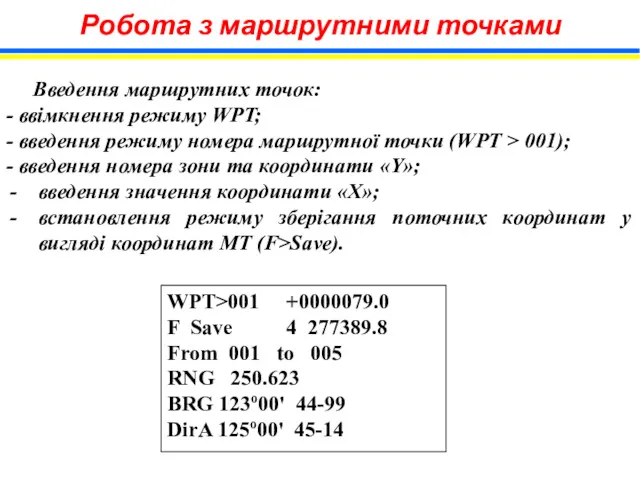
Введення маршрутних точок:
- ввімкнення режиму WPT;
- введення режиму номера маршрутної
Введення маршрутних точок:
- ввімкнення режиму WPT;
- введення режиму номера маршрутної
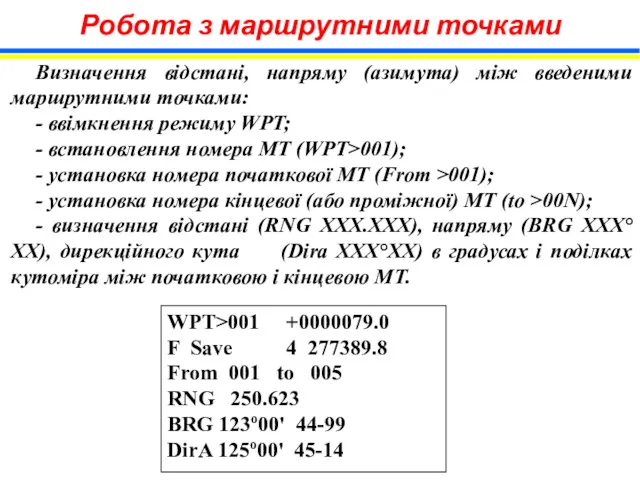
Визначення відстані, напряму (азимута) між введеними маршрутними точками:
- ввімкнення режиму WPT;
-
Визначення відстані, напряму (азимута) між введеними маршрутними точками:
- ввімкнення режиму WPT;
-

25. Розкрийте особливості та призначення формулярів POS та INF у НАС
25. Розкрийте особливості та призначення формулярів POS та INF у НАС
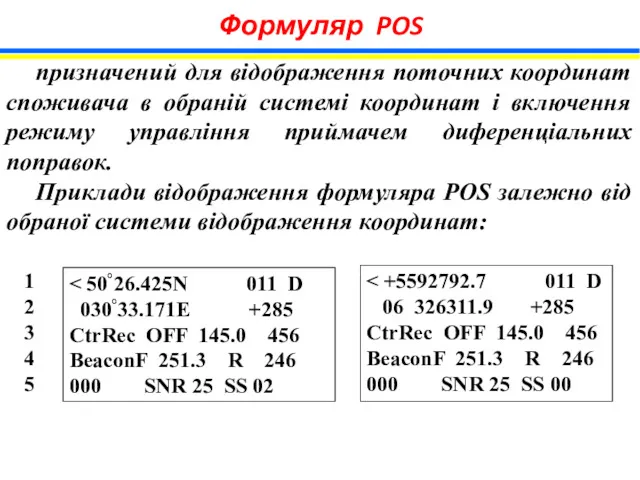
призначений для відображення поточних координат споживача в обраній системі координат
призначений для відображення поточних координат споживача в обраній системі координат
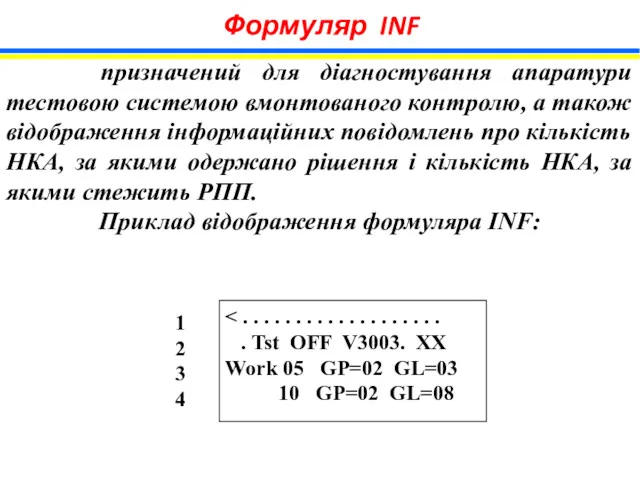
призначений для діагностування апаратури тестовою системою вмонтованого контролю, а також
призначений для діагностування апаратури тестовою системою вмонтованого контролю, а також
26. Розкрийте способи та загальні правила вивчення і оцінки місцевості
26. Розкрийте способи та загальні правила вивчення і оцінки місцевості
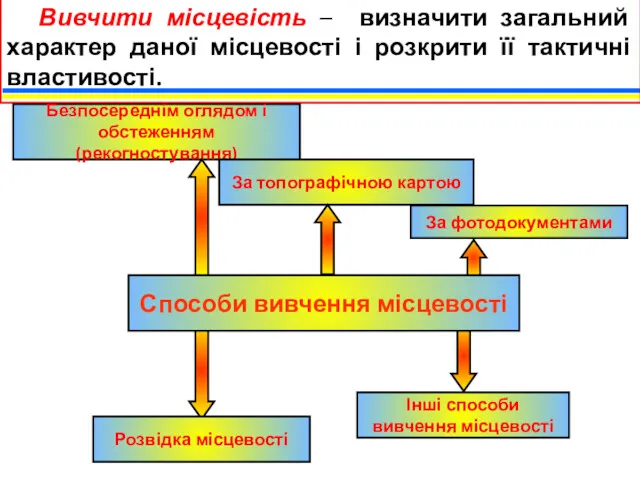
Способи вивчення місцевості
Вивчити місцевість – визначити загальний характер даної місцевості і
Способи вивчення місцевості
Вивчити місцевість – визначити загальний характер даної місцевості і
Військово-інженерні описи місцевості – узагальнені дані про місцевість, промисловість, місця зосередження
Військово-інженерні описи місцевості – узагальнені дані про місцевість, промисловість, місця зосередження
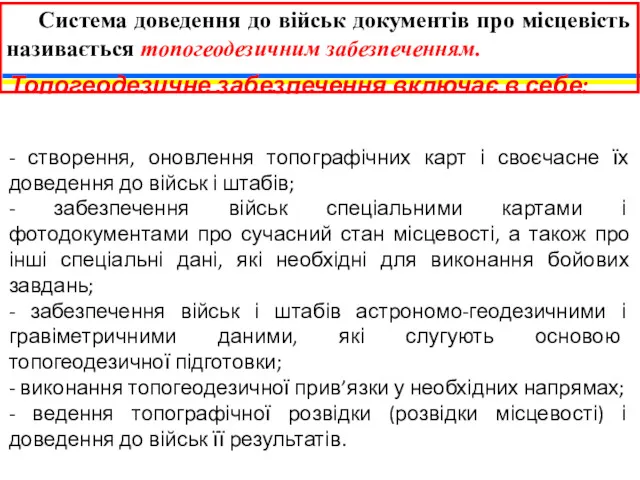
Топогеодезичне забезпечення включає в себе:
- створення, оновлення топографічних карт і своєчасне
Топогеодезичне забезпечення включає в себе:
- створення, оновлення топографічних карт і своєчасне
27. Розкрийте порядок визначення видимості між точками місцевості способом побудови трикутника.
27. Розкрийте порядок визначення видимості між точками місцевості способом побудови трикутника.
28.Розкрийте порядок побудови профілю місцевості
28.Розкрийте порядок побудови профілю місцевості
Побудова профілів місцевості
Профілем місцевості називають креслення, яке відображає розріз місцевості
Профілем місцевості називають креслення, яке відображає розріз місцевості
1. На карті прокреслити профільну лінію.
2. До профільної лінії прикласти
1. На карті прокреслити профільну лінію.
2. До профільної лінії прикласти
29. Що таке глибина укриття , кут місця та мертвий простір.
29. Що таке глибина укриття , кут місця та мертвий простір.
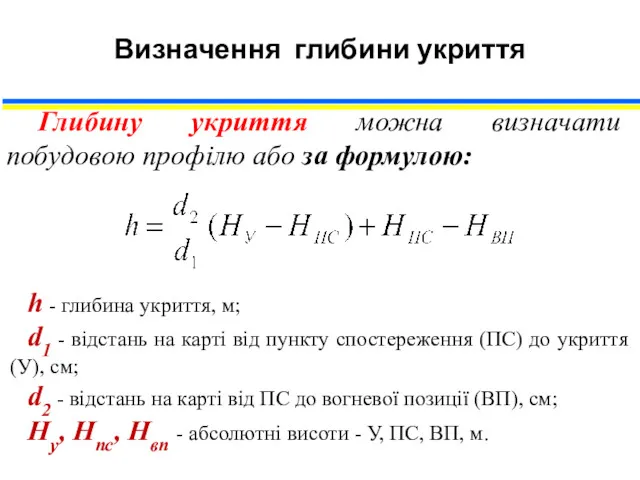
Глибину укриття можна визначати побудовою профілю або за формулою:
h -
Глибину укриття можна визначати побудовою профілю або за формулою:
h -
Визначення кута місця цілі
Кут місця цілі (ξ) можна визначити за формулою:
Нц
Визначення кута місця цілі
Кут місця цілі (ξ) можна визначити за формулою:
Нц
30. Розкрийте порядок нанесення на карту полів невидимості
1. В секторі спостереження
30. Розкрийте порядок нанесення на карту полів невидимості
1. В секторі спостереження
Визначення полів невидимості по карті.
Полем невидимості називаються закриті ділянки місцевості, які
Полем невидимості називаються закриті ділянки місцевості, які

Формули для вирішення 3 рівня
Формули для вирішення 3 рівня
Перехід від дирекційного кута до
магнітного азимута за формулами
Аm = α
Перехід від дирекційного кута до
магнітного азимута за формулами
Аm = α
 Географическое положение Северной Америки. Исследования и открытия
Географическое положение Северной Америки. Исследования и открытия Экономико-географическое положение и природные ресурсы Новосибирской области. География. 9 класс
Экономико-географическое положение и природные ресурсы Новосибирской области. География. 9 класс Зональность географической оболочки
Зональность географической оболочки Обнажение Адищево. Полевой маршрут и камеральная обработка материалов
Обнажение Адищево. Полевой маршрут и камеральная обработка материалов Путешествие по материкам. Окружающий мир. 2 класс
Путешествие по материкам. Окружающий мир. 2 класс Общая характеристика США (11 класс)
Общая характеристика США (11 класс) Ласкаво просимо до Одеси
Ласкаво просимо до Одеси Факторы, определяющие климат России
Факторы, определяющие климат России Вода – это жизнь (часть 1)
Вода – это жизнь (часть 1) Южная Америка: образ материка
Южная Америка: образ материка Оңтүстік Корея
Оңтүстік Корея Меланезия
Меланезия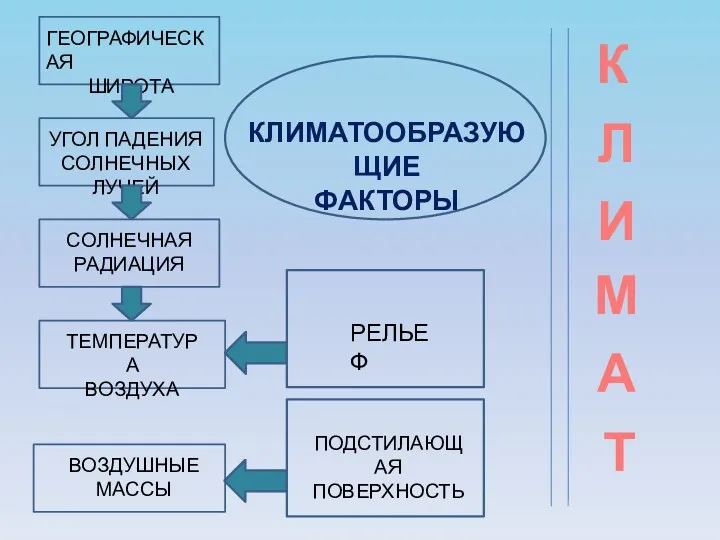 Типы климата России
Типы климата России Границы Российской Федерации. Страны — соседи России. Моря, омывающие территорию России. 8 класс
Границы Российской Федерации. Страны — соседи России. Моря, омывающие территорию России. 8 класс Город Берлин
Город Берлин Доповідь про рідне село Прилбичі
Доповідь про рідне село Прилбичі Халықтардың қалыптасу үдерістері
Халықтардың қалыптасу үдерістері Озера, подземные воды, болота, мерзлота, ледники
Озера, подземные воды, болота, мерзлота, ледники Ласкаво просимо до Донецька
Ласкаво просимо до Донецька Западная Сибирь
Западная Сибирь Пам’ятки Черкаської області
Пам’ятки Черкаської області Вчення В.Вернадського про біосферу
Вчення В.Вернадського про біосферу Путешествие по Франции
Путешествие по Франции Урок +презентация по теме Климат Земли, факторы его формирования
Урок +презентация по теме Климат Земли, факторы его формирования Оңтүстік жарты шар материктерінің ұқсастықтары мен айырмашылықтары
Оңтүстік жарты шар материктерінің ұқсастықтары мен айырмашылықтары Пори року. 5 клас
Пори року. 5 клас Устойчивое развитие
Устойчивое развитие П.П. Семенов -Тянь-Шанский
П.П. Семенов -Тянь-Шанский