- Фотограмметрия и дистанционное зондирование

Содержание
- 2. Содержание курса Ведение. Применение фотограмметрии и дистанционного зондирования местности для землеустройства и формирования земельного кадастра. Общие
- 3. Литература Основная Назаров, А.С. Фотограмметрия: пособие для студентов вузов / А.С. Назаров. – 2-е изд., перераб.
- 4. Введение 1. Применение фотограмметрии и дистанционного зондирования местности для землеустройства и формирования земельного кадастра. В различные
- 5. 2. Общие понятия о фотограмметрии и дистанционном зондировании Фотограмметрия – научная дисциплина, изучающая способы определения формы,
- 6. Общие понятия фотограмметрии a b c d P S A B D C P1 aº bº
- 7. Общие понятия о фотограмметрии А C SL SR aL cL aR cR О1 О2 оL оR
- 8. Обратимость фотоизображения B b AL BL CL AR BR CR AL2 BL2 CL2 A1 B1 C1
- 9. Классификация видов съемочных работ для создания планов и карт Фототопографическая съемка Наземная Фототопографическая съемка Аэрофототопографическая съемка
- 10. Понятие об аэрофотосъемке Аэрофотосъемка – процесс получения изображений местности с целью их преобразования в карту или
- 11. Принцип аэрофотосъемки Маршрутная съемка Площадная съемка Съемка по криволинейному маршруту
- 12. Схема маршрутной аэросъемки S1 S2 S3 fk Hф Р2 Направление полета Вх1 Р1 Вх2 (1)
- 13. Принцип аналоговой и цифровой аэрофотосъемки α ≤ 3° S α > 3° S a) Плановая б)
- 14. Характеристика аналоговых снимков Зернистость – видимая прерывистость изображения в зависимости от размеров светочувствительных зерен; Разрешающая способность
- 15. Датчики цифрового изображения Из физики (квантовой механики) известно, что в структуре атома любого элемента выделяют три
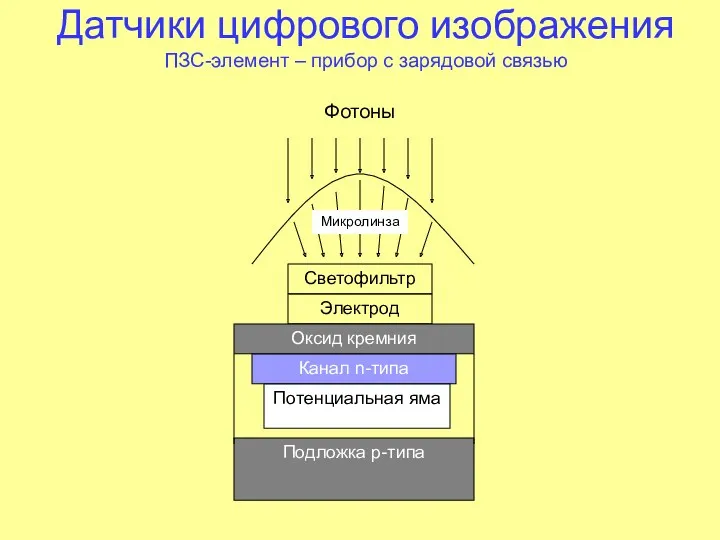
- 16. Датчики цифрового изображения ПЗС-элемент – прибор с зарядовой связью
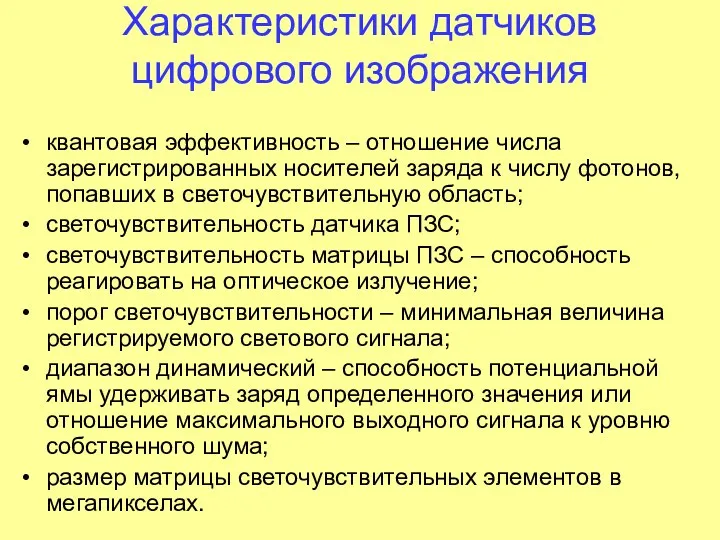
- 17. Характеристики датчиков цифрового изображения квантовая эффективность – отношение числа зарегистрированных носителей заряда к числу фотонов, попавших
- 18. Дистанционное зондирование или лазерное сканирование
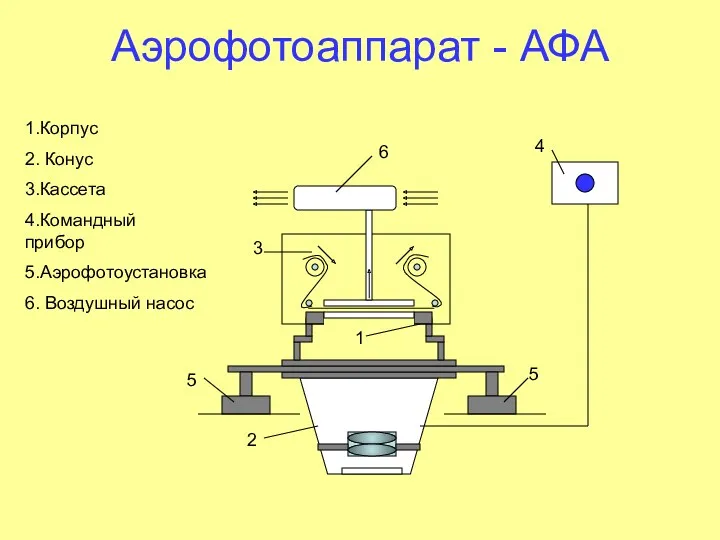
- 19. Аэрофотоаппарат - АФА 1 2 3 4 5 5 1.Корпус 2. Конус 3.Кассета 4.Командный прибор 5.Аэрофотоустановка
- 20. Результаты аэросъемочных работ Облако точек воздушного сканирования Аэроснимок
- 21. Фрагмент цифрового топографического плана
- 22. Дистанционное зондирование или лазерное сканирование Leica Geosystems Фильм. Земельный кадастр Часть 1: Основы; Часть 2: Как
- 23. Свойства аэроснимков Схема центральной проекции АФА fk H0 a′ b′ o′ c′ Картинная поверхность, P-негатив Предметная
- 24. Свойства аэроснимков Основные точки центральной проекции в теории перспективы
- 25. Свойства аэроснимков P – картинная плоскость, в которой строится изображение объектов (плоскость аэроснимка); S – центр
- 26. Свойства аэроснимков Завиимости геометрических характеристик в теории перспективы So = Soo = f on = f
- 27. Свойства аэроснимков Зависимость координат точек местности и координат точек снимка y X A XA YA a
- 28. Свойства аэроснимков Влияние рельефа на масштаб изображения А B C O a b c o S
- 29. Влияние рельефа на масштаб изображения h fk HO S A AO O AX ao r Δh
- 30. Влияние продольного угла наклона на масштаб изображения fk Hф S A O а o α fk
- 31. Элементы ориентирования снимков γв γг SЛ SП X Y Z Z Z B X Y BХ
- 32. Определение элементов ориентирования снимков y y x x L R *3 *4 *3 *4 *5 *6
- 33. 3. Дешифрирование аэроснимков
- 34. 4. Фотограмметрическая обработка аэроснимков Схема бинокулярного зрения А γА J γ0 С γС в S1 S2
- 35. Аэронивелирование (2)
- 36. Фотограмметрическая обработка аэроснимков Определение превышений H fk S1 S2 B o1 o2 a0 a0' a1 a2
- 37. Определение превышений по аэроснимкам В = А0 О1 + А0О2 = (a0 o1 + a0'o2) =
- 38. Принцип измерения параллаксов и превышений А В Sл Sп ап вп оп R L oл ал
- 39. Принцип измерения параллаксов и превышений ол оп оп* b *а -хап *а хал Р0 = хол
- 40. Нивелирование по аэроснимкам y x y x № 1 № 2 № 3 № 4 y
- 41. Журнал нивелирования по аэроснимкам Pср = (P1 + P2)/2 ΔР = Pср(i) - Pср(ц), Ai =
- 42. Трансформирование аэроснимков Трансформирование - преобразование центральной перспективной (α > 3°) проекции снимков в их плановое положение
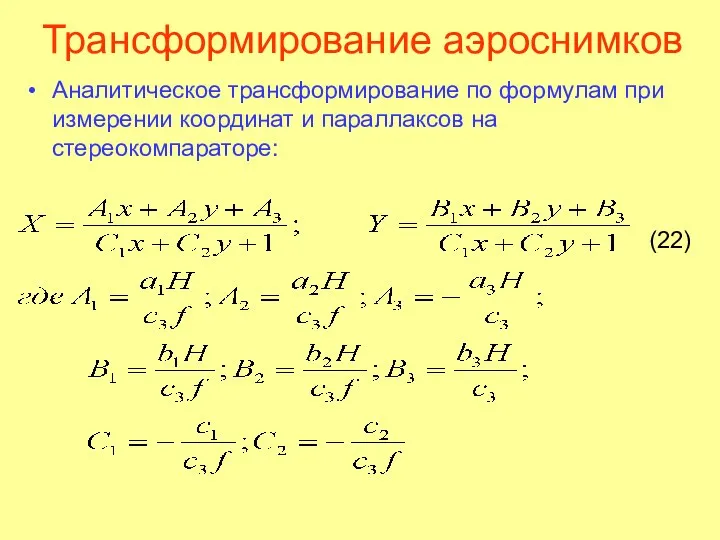
- 43. Трансформирование аэроснимков Аналитическое трансформирование по формулам при измерении координат и параллаксов на стереокомпараторе: (22)
- 44. Определение направляющих косинусов (23)
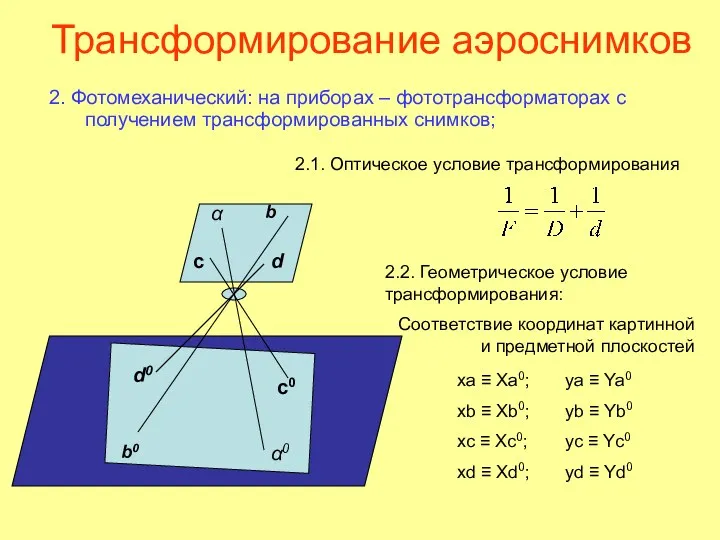
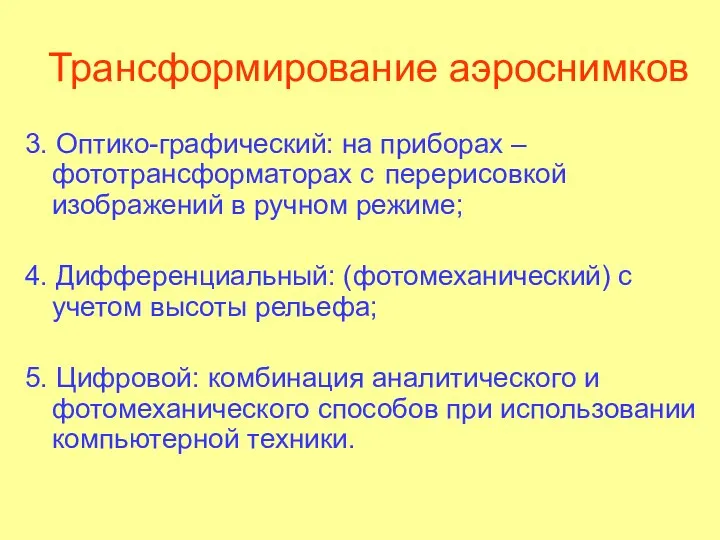
- 45. Трансформирование аэроснимков 2. Фотомеханический: на приборах – фототрансформаторах с получением трансформированных снимков; 2.1. Оптическое условие трансформирования
- 46. Трансформирование аэроснимков 3. Оптико-графический: на приборах – фототрансформаторах с перерисовкой изображений в ручном режиме; 4. Дифференциальный:
- 47. 5. Планово-высотное обоснование или привязка аэроснимков Выбор на местности местоположения опознаков *3 *4 *1 *2 *5
- 48. Конструкция опознаков 5 – 10 м На снимке 0,2 мм Скважина Труба d = 50–70 мм
- 49. Теодолитные хода повышенной точности (полигонометрия) А D С В n 3 2 1 βB β2 β3
- 50. Нивелирование опознаков СА ВА n 3 2 1 hB1 Направление хода h12 h23 h3n hnC AB
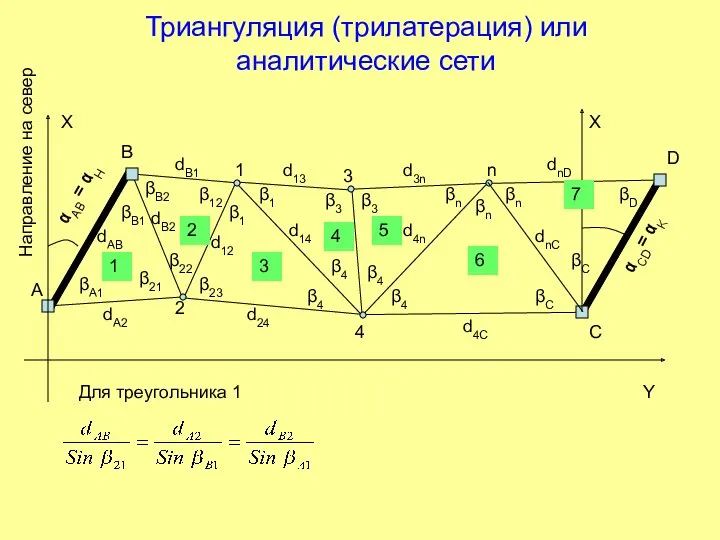
- 51. Триангуляция (трилатерация) или аналитические сети А D С В Направление на север 3 2 1 4
- 52. Триангуляция (трилатерация) или аналитические сети ΔXi = di*Cos βi ΔYi = di*Sin βi Xi+1 = Xi
- 53. Обратная засечка АXY С ВXY DXY γB γD γА
- 54. Фототриангуляция y № 1 x y x № 2 № 3 x y № 4 *31
- 55. Фототриангуляция Δα = αЛ - αП (15) (16) (17) (18) (19)
- 56. 6. Применение электронной геодезической техники и спутниковые методы геодезических измерений
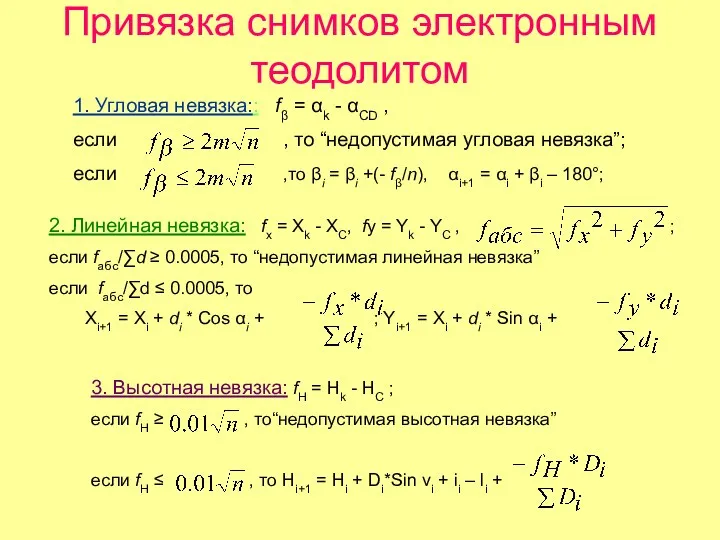
- 57. Привязка снимков электронным теодолитом Режим прямой геодезической задачи di = Di Cos νi; αi+1 = αi
- 58. Привязка снимков электронным теодолитом 1. Угловая невязка:: fβ = αk - αCD , если , то
- 59. Спутниковые методы привязки снимков ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система; NAVSTAR – GPS – NAVigation Sistem
- 60. Космический сегмент ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система 24 спутника на 3-х орбитальных плоскостях. Расстояние от
- 61. Космический сегмент NAVSTAR – GPS – NAVigation Sistem with Time And Rangiring – Global Positioning System
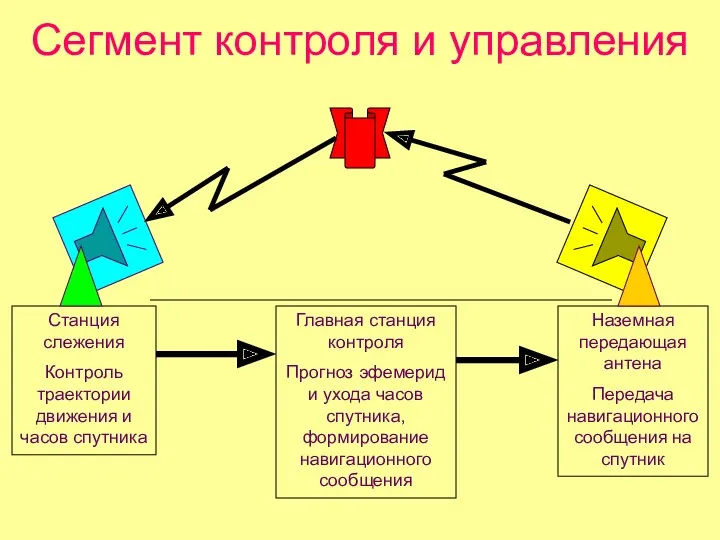
- 62. Сегмент контроля и управления ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система ЦУС - центр управления системой; ЦС
- 63. Сегмент контроля и управления Станция слежения Контроль траектории движения и часов спутника Главная станция контроля Прогноз
- 64. Сегмент пользователя Структурная схема приемника Частотное разделение сигналов Кодовое разделение сигналов
- 65. Сегмент пользователя Структурная схема приемника Антена с предусилителем; Идентификатор сигралов и распределение частот по каналам; Микропроцессор
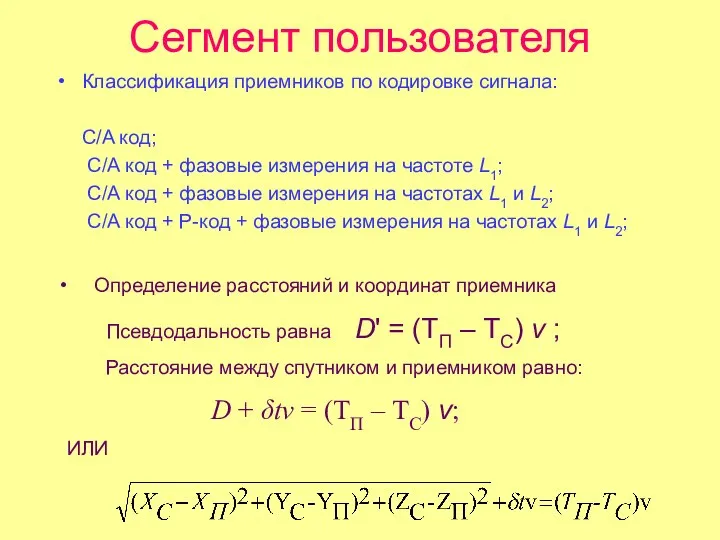
- 66. Сегмент пользователя Классификация приемников по кодировке сигнала: C/A код; C/A код + фазовые измерения на частоте
- 67. Сегмент пользователя Режимы наблюдений: Статика; Быстрая статика; Кинематика; Кинематика “в полете”; Кинематика в реальном времени. Преобразование
- 69. Скачать презентацию
Содержание курса
Ведение.
Применение фотограмметрии и дистанционного зондирования местности для землеустройства и
Содержание курса
Ведение.
Применение фотограмметрии и дистанционного зондирования местности для землеустройства и
Литература
Основная
Назаров, А.С. Фотограмметрия: пособие для студентов вузов / А.С. Назаров. –
Литература
Основная
Назаров, А.С. Фотограмметрия: пособие для студентов вузов / А.С. Назаров. –
Введение
1. Применение фотограмметрии и дистанционного зондирования местности для землеустройства и формирования
Введение
1. Применение фотограмметрии и дистанционного зондирования местности для землеустройства и формирования
2. Общие понятия о фотограмметрии и дистанционном зондировании
Фотограмметрия –
2. Общие понятия о фотограмметрии и дистанционном зондировании
Фотограмметрия –
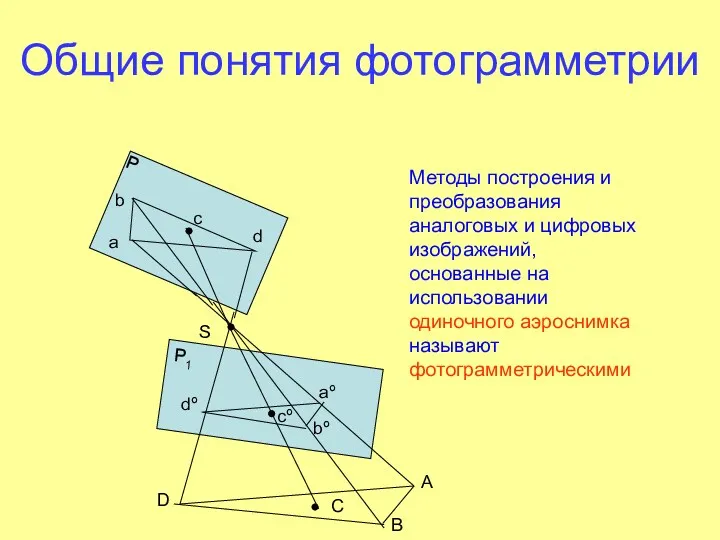
Общие понятия фотограмметрии
a
b
c
d
P
S
A
B
D
C
P1
aº
bº
dº
cº
Методы построения и преобразования аналоговых и цифровых изображений,
Общие понятия фотограмметрии
a
b
c
d
P
S
A
B
D
C
P1
aº
bº
dº
cº
Методы построения и преобразования аналоговых и цифровых изображений,
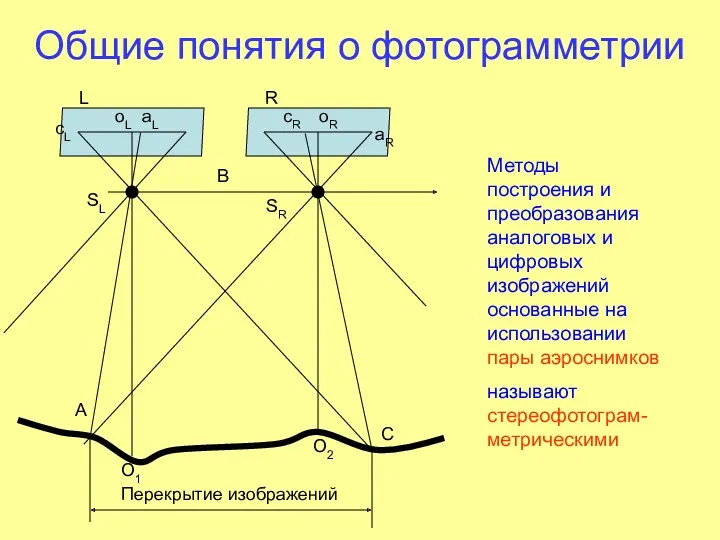
Общие понятия о фотограмметрии
А
C
SL
SR
aL
cL
aR
cR
О1
О2
оL
оR
Методы построения и преобразования аналоговых и цифровых изображений
Общие понятия о фотограмметрии
А
C
SL
SR
aL
cL
aR
cR
О1
О2
оL
оR
Методы построения и преобразования аналоговых и цифровых изображений
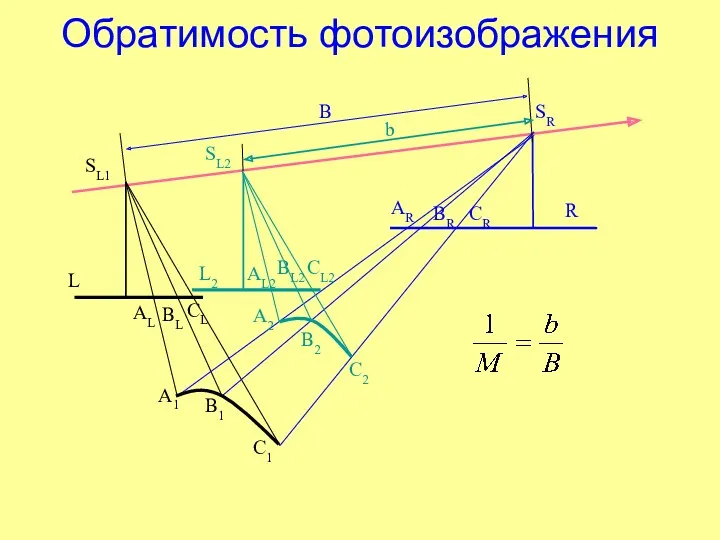
Обратимость фотоизображения
B
b
AL
BL
CL
AR
BR
CR
AL2
BL2
CL2
A1
B1
C1
A2
B2
C2
L
R
L2
SL1
SR
SL2
Обратимость фотоизображения
B
b
AL
BL
CL
AR
BR
CR
AL2
BL2
CL2
A1
B1
C1
A2
B2
C2
L
R
L2
SL1
SR
SL2

Классификация видов съемочных работ для создания планов и карт
Фототопографическая съемка
Наземная Фототопографическая
Классификация видов съемочных работ для создания планов и карт
Фототопографическая съемка
Наземная Фототопографическая
Понятие об аэрофотосъемке
Аэрофотосъемка – процесс получения изображений местности с целью их
Понятие об аэрофотосъемке
Аэрофотосъемка – процесс получения изображений местности с целью их
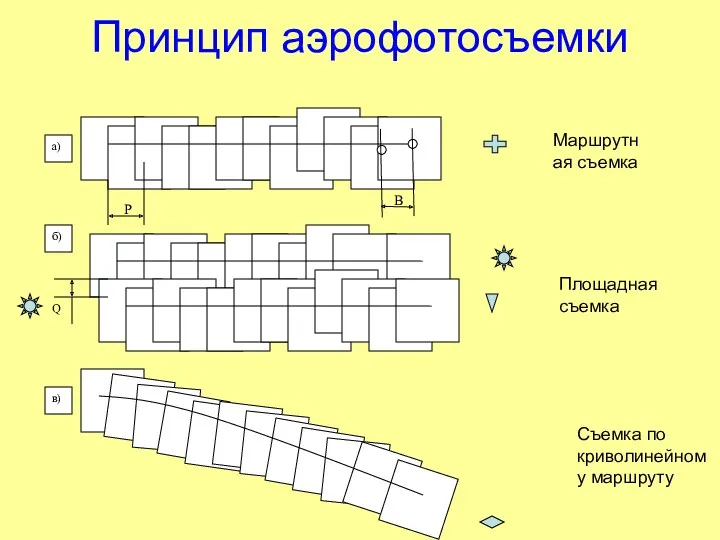
Принцип аэрофотосъемки
Маршрутная съемка
Площадная съемка
Съемка по криволинейному маршруту
Принцип аэрофотосъемки
Маршрутная съемка
Площадная съемка
Съемка по криволинейному маршруту
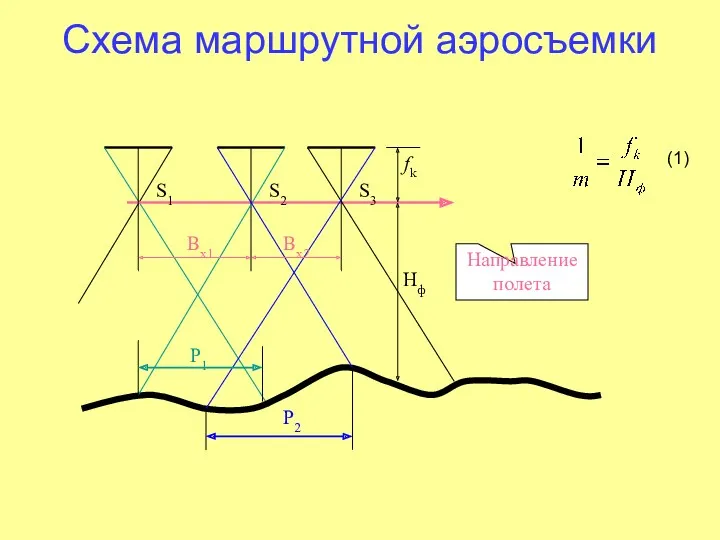
Схема маршрутной аэросъемки
S1
S2
S3
fk
Hф
Р2
Направление полета
Вх1
Р1
Вх2
(1)
Схема маршрутной аэросъемки
S1
S2
S3
fk
Hф
Р2
Направление полета
Вх1
Р1
Вх2
(1)
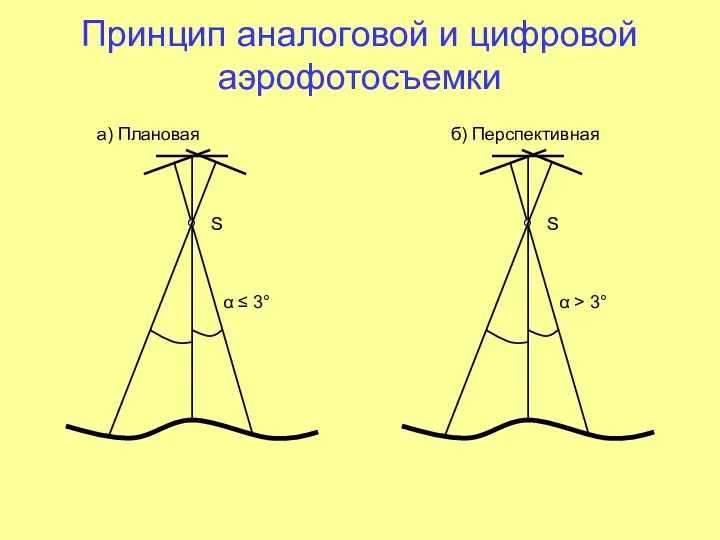
Принцип аналоговой и цифровой аэрофотосъемки
α ≤ 3°
S
α > 3°
S
a) Плановая
б) Перспективная
Принцип аналоговой и цифровой аэрофотосъемки
α ≤ 3°
S
α > 3°
S
a) Плановая
б) Перспективная
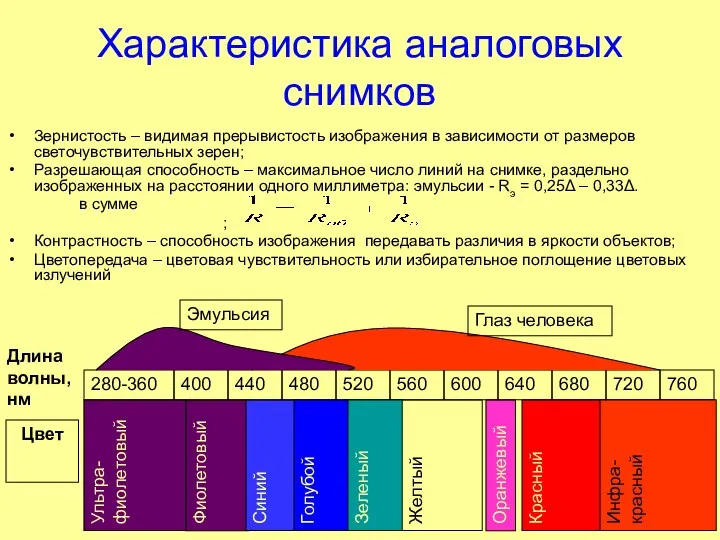
Характеристика аналоговых снимков
Зернистость – видимая прерывистость изображения в зависимости от размеров
Характеристика аналоговых снимков
Зернистость – видимая прерывистость изображения в зависимости от размеров
Датчики цифрового изображения
Из физики (квантовой механики) известно, что в структуре атома
Датчики цифрового изображения
Из физики (квантовой механики) известно, что в структуре атома
Датчики цифрового изображения
ПЗС-элемент – прибор с зарядовой связью
Датчики цифрового изображения
ПЗС-элемент – прибор с зарядовой связью
Характеристики датчиков цифрового изображения
квантовая эффективность – отношение числа зарегистрированных носителей
Характеристики датчиков цифрового изображения
квантовая эффективность – отношение числа зарегистрированных носителей

Дистанционное зондирование или лазерное сканирование
Дистанционное зондирование или лазерное сканирование
Аэрофотоаппарат - АФА
1
2
3
4
5
5
1.Корпус
2. Конус
3.Кассета
4.Командный прибор
5.Аэрофотоустановка
6. Воздушный насос
6
Аэрофотоаппарат - АФА
1
2
3
4
5
5
1.Корпус
2. Конус
3.Кассета
4.Командный прибор
5.Аэрофотоустановка
6. Воздушный насос
6

Результаты аэросъемочных работ
Облако точек воздушного сканирования
Аэроснимок
Результаты аэросъемочных работ
Облако точек воздушного сканирования
Аэроснимок

Фрагмент цифрового топографического плана
Фрагмент цифрового топографического плана
Дистанционное зондирование или лазерное сканирование
Leica Geosystems
Фильм. Земельный кадастр
Часть 1: Основы;
Часть
Дистанционное зондирование или лазерное сканирование
Leica Geosystems
Фильм. Земельный кадастр
Часть 1: Основы;
Часть
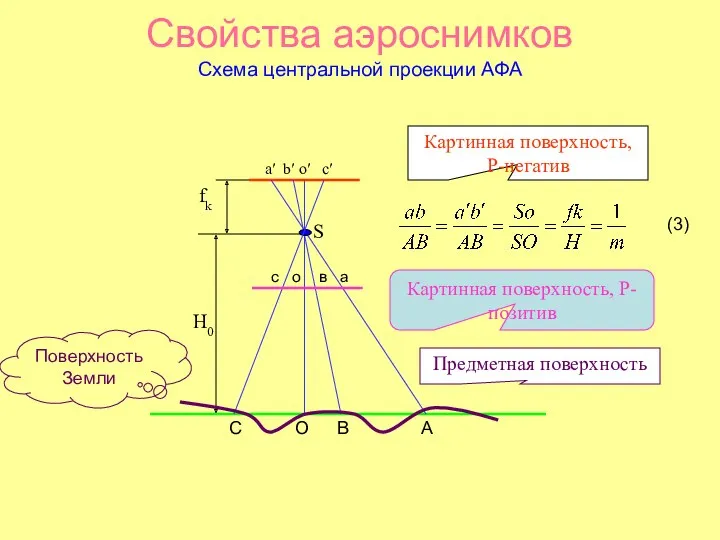
Свойства аэроснимков
Схема центральной проекции АФА
fk
H0
a′ b′ o′ c′
Картинная поверхность, P-негатив
Предметная
Свойства аэроснимков
Схема центральной проекции АФА
fk
H0
a′ b′ o′ c′
Картинная поверхность, P-негатив
Предметная
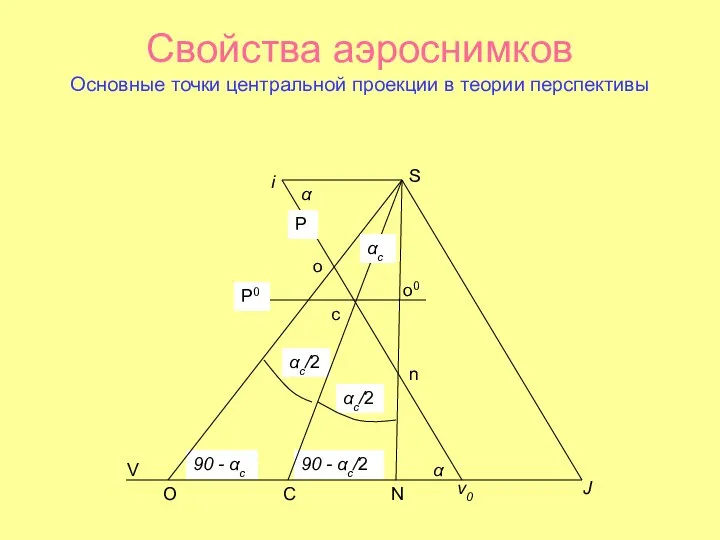
Свойства аэроснимков
Основные точки центральной проекции в теории перспективы
Свойства аэроснимков
Основные точки центральной проекции в теории перспективы
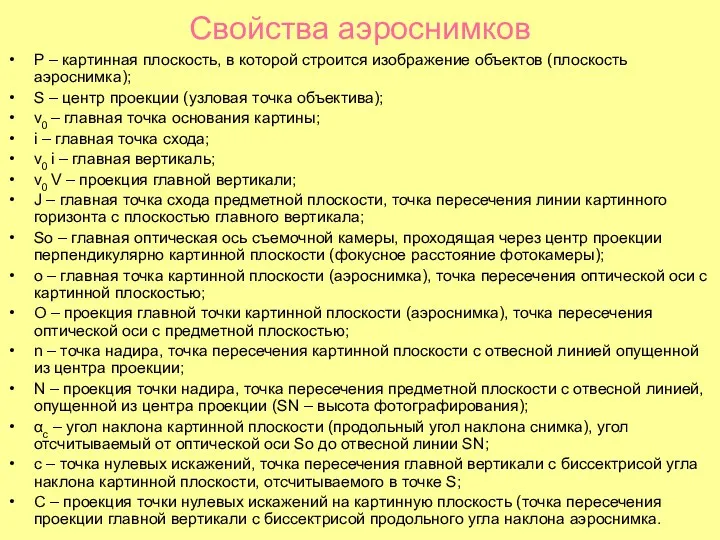
Свойства аэроснимков
P – картинная плоскость, в которой строится изображение объектов (плоскость
Свойства аэроснимков
P – картинная плоскость, в которой строится изображение объектов (плоскость
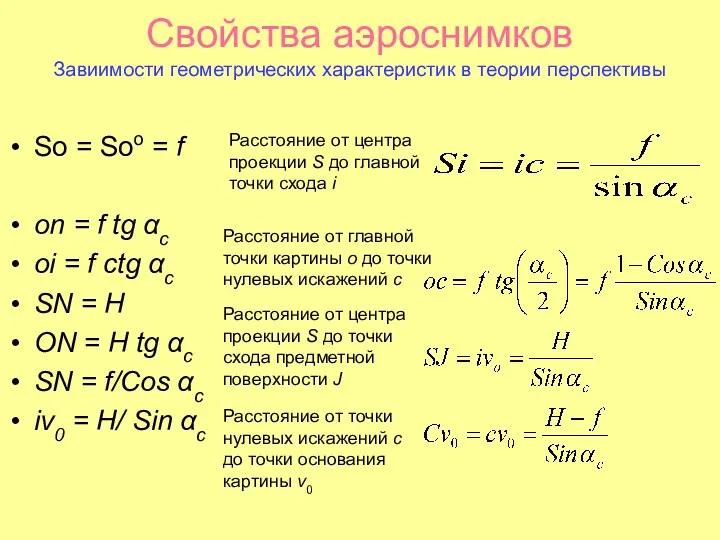
Свойства аэроснимков
Завиимости геометрических характеристик в теории перспективы
So = Soo = f
on
Свойства аэроснимков
Завиимости геометрических характеристик в теории перспективы
So = Soo = f
on
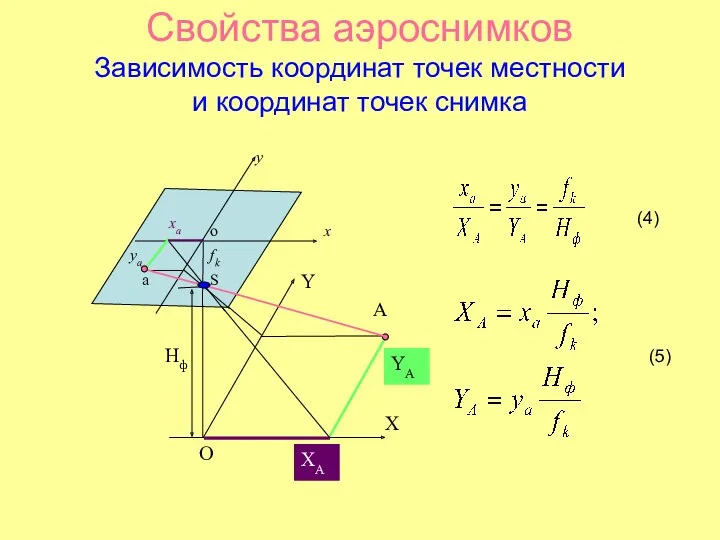
Свойства аэроснимков
Зависимость координат точек местности
и координат точек снимка
y
X
A
XA
YA
a
o
x
xa
ya
O
Y
S
Hф
fk
(4)
(5)
Свойства аэроснимков
Зависимость координат точек местности
и координат точек снимка
y
X
A
XA
YA
a
o
x
xa
ya
O
Y
S
Hф
fk
(4)
(5)
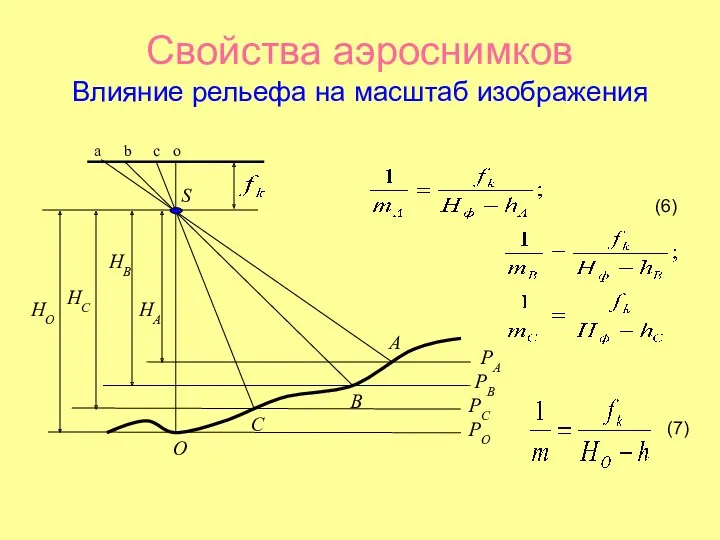
Свойства аэроснимков
Влияние рельефа на масштаб изображения
А
B
C
O
a
b
c
o
S
HO
HC
HB
HA
PO
PC
PB
PA
(6)
(7)
Свойства аэроснимков
Влияние рельефа на масштаб изображения
А
B
C
O
a
b
c
o
S
HO
HC
HB
HA
PO
PC
PB
PA
(6)
(7)
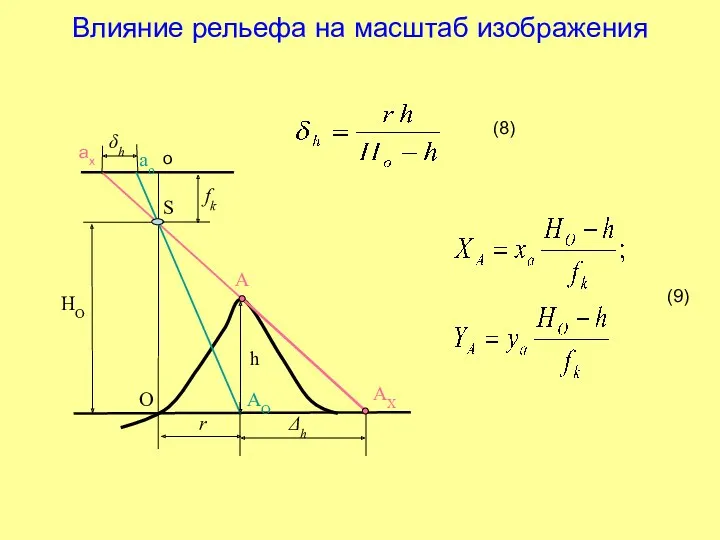
Влияние рельефа на масштаб изображения
h
fk
HO
S
A
AO
O
AX
ao
r
Δh
(8)
(9)
ax
o
δh
Влияние рельефа на масштаб изображения
h
fk
HO
S
A
AO
O
AX
ao
r
Δh
(8)
(9)
ax
o
δh
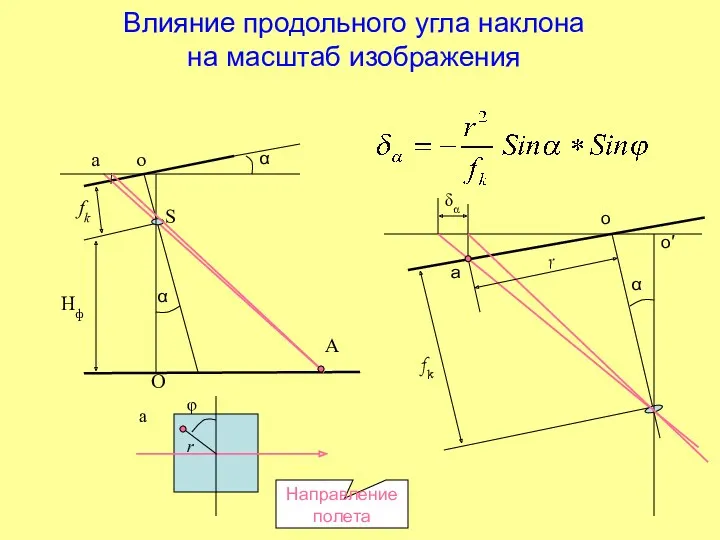
Влияние продольного угла наклона
на масштаб изображения
fk
Hф
S
A
O
а o
α
fk
α
о
r
о′
δα
а
r
φ
Направление полета
α
a
Влияние продольного угла наклона
на масштаб изображения
fk
Hф
S
A
O
а o
α
fk
α
о
r
о′
δα
а
r
φ
Направление полета
α
a
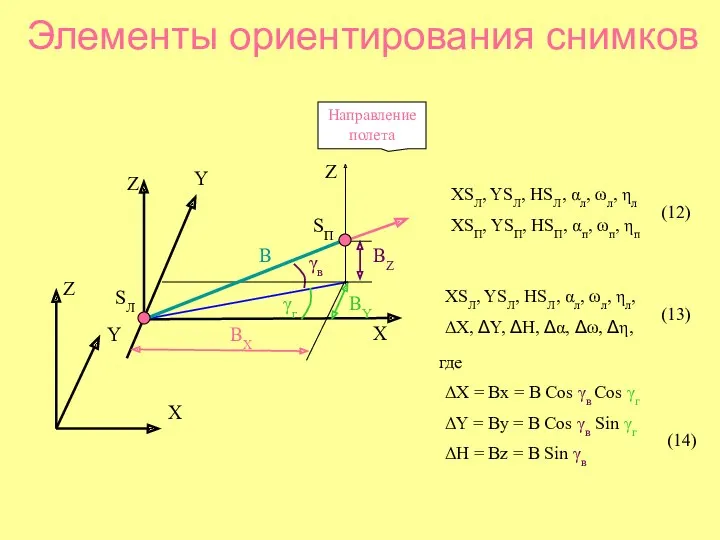
Элементы ориентирования снимков
γв
γг
SЛ
SП
X
Y
Z
Z
Z
B
X
Y
BХ
BY
BZ
Направление полета
XSЛ, YSЛ, HSЛ, αл, ωл, ηл
XSП, YSП, HSП,
Элементы ориентирования снимков
γв
γг
SЛ
SП
X
Y
Z
Z
Z
B
X
Y
BХ
BY
BZ
Направление полета
XSЛ, YSЛ, HSЛ, αл, ωл, ηл
XSП, YSП, HSП,
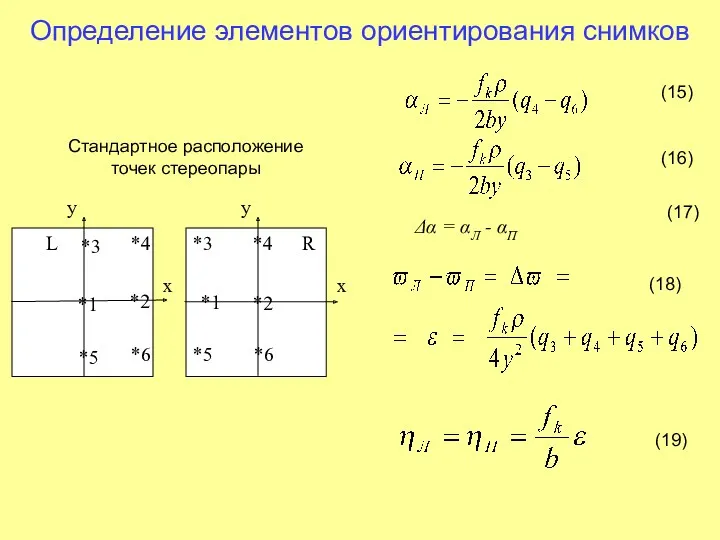
Определение элементов ориентирования снимков
y
y
x
x
L
R
*3
*4
*3
*4
*5
*6
*5
*6
*1
*2
*1
*2
Δα = αЛ - αП
Стандартное расположение точек
Определение элементов ориентирования снимков
y
y
x
x
L
R
*3
*4
*3
*4
*5
*6
*5
*6
*1
*2
*1
*2
Δα = αЛ - αП
Стандартное расположение точек
3. Дешифрирование аэроснимков
3. Дешифрирование аэроснимков
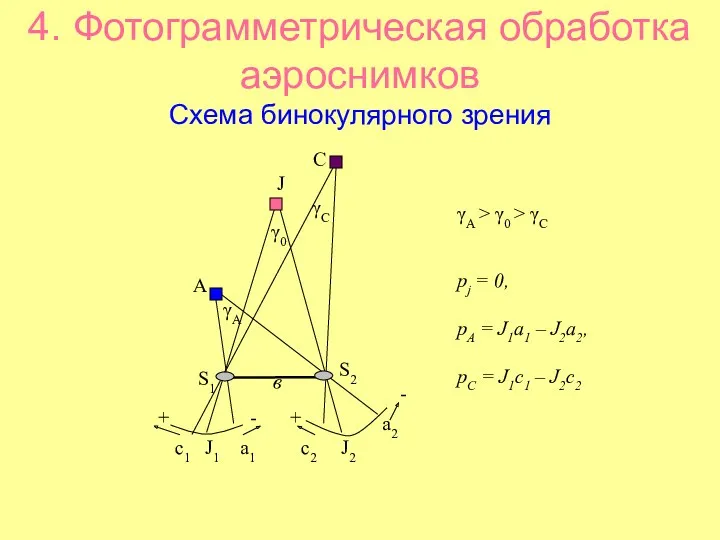
4. Фотограмметрическая обработка аэроснимков
Схема бинокулярного зрения
А
γА
J
γ0
С
γС
в
S1
S2
+
+
с1
4. Фотограмметрическая обработка аэроснимков
Схема бинокулярного зрения
А
γА
J
γ0
С
γС
в
S1
S2
+
+
с1
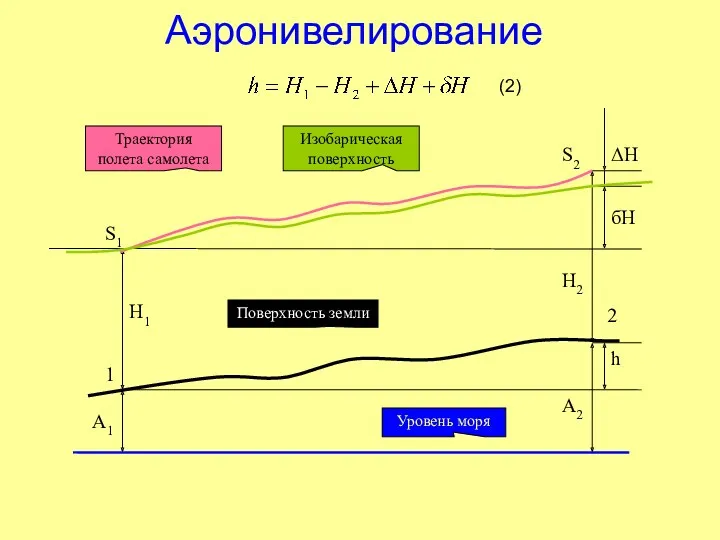
Аэронивелирование
(2)
Аэронивелирование
(2)
Фотограмметрическая обработка аэроснимков
Определение превышений
H
fk
S1
S2
B
o1
o2
a0
a0'
a1
a2
A
O1
O2
A2 A0 A1
Т
Направление полета
Территория местности
h
(20)
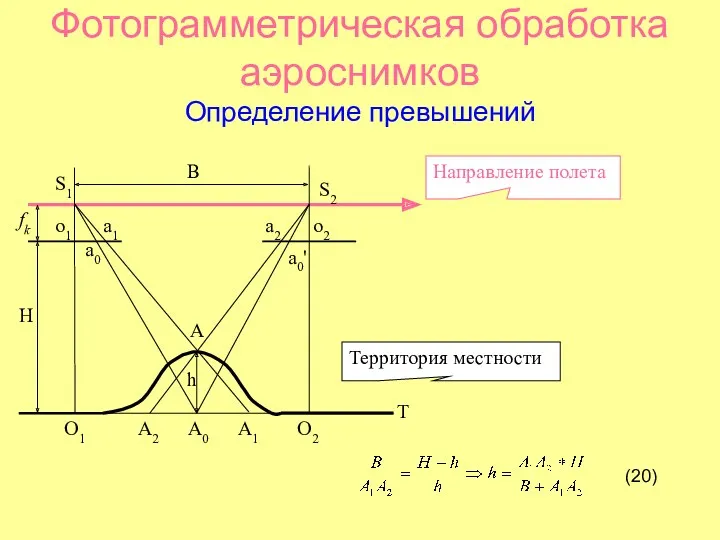
Фотограмметрическая обработка аэроснимков
Определение превышений
H
fk
S1
S2
B
o1
o2
a0
a0'
a1
a2
A
O1
O2
A2 A0 A1
Т
Направление полета
Территория местности
h
(20)
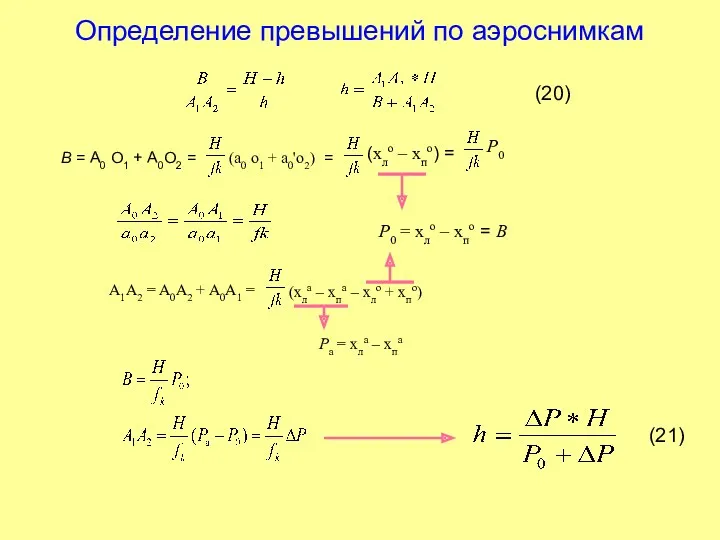
Определение превышений по аэроснимкам
В = А0 О1 + А0О2 =
Определение превышений по аэроснимкам
В = А0 О1 + А0О2 =
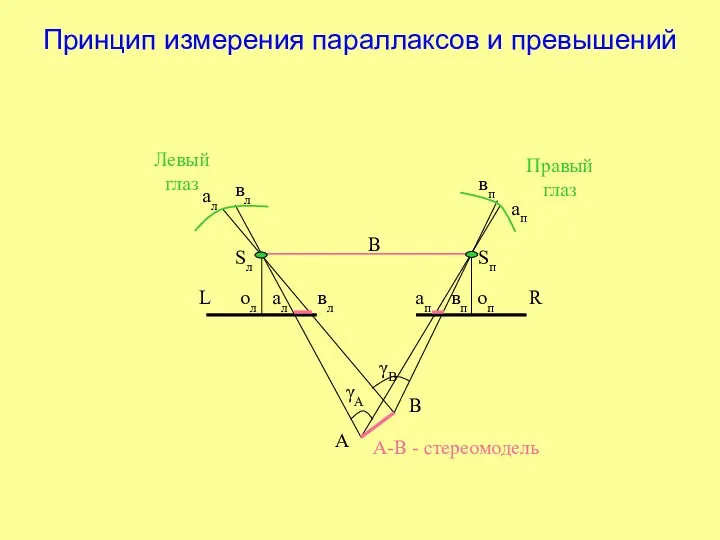
Принцип измерения параллаксов и превышений
А
В
Sл
Sп
ап вп оп R
L oл ал вл
γA
γB
Правый
Принцип измерения параллаксов и превышений
А
В
Sл
Sп
ап вп оп R
L oл ал вл
γA
γB
Правый
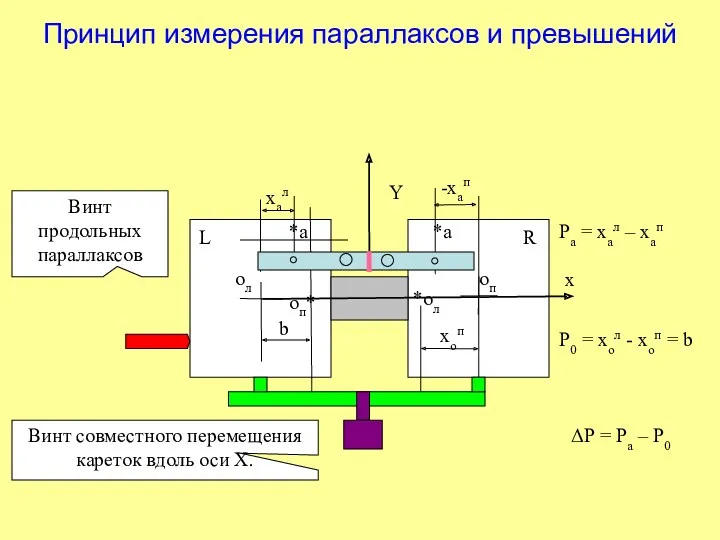
Принцип измерения параллаксов и превышений
ол
оп
оп*
b
*а
-хап
*а
хал
Р0 = хол - хоп = b
*ол
хоп
Ра
Принцип измерения параллаксов и превышений
ол
оп
оп*
b
*а
-хап
*а
хал
Р0 = хол - хоп = b
*ол
хоп
Ра
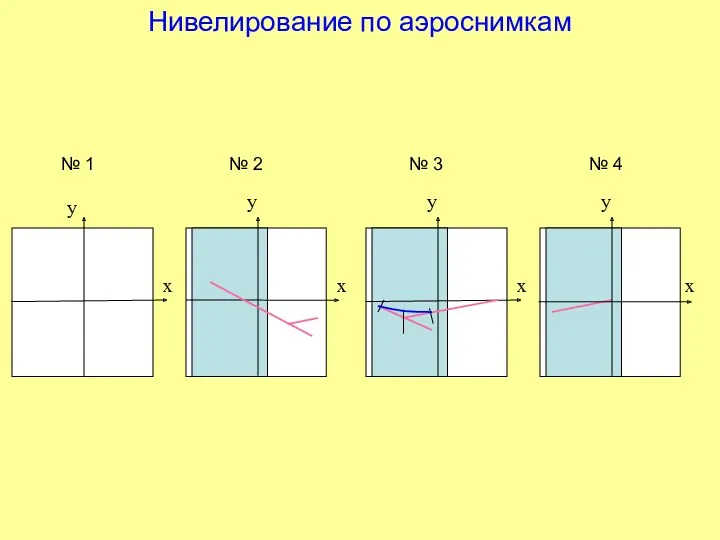
Нивелирование по аэроснимкам
y
x
y
x
№ 1
№ 2
№ 3
№ 4
y
x
x
y
Нивелирование по аэроснимкам
y
x
y
x
№ 1
№ 2
№ 3
№ 4
y
x
x
y
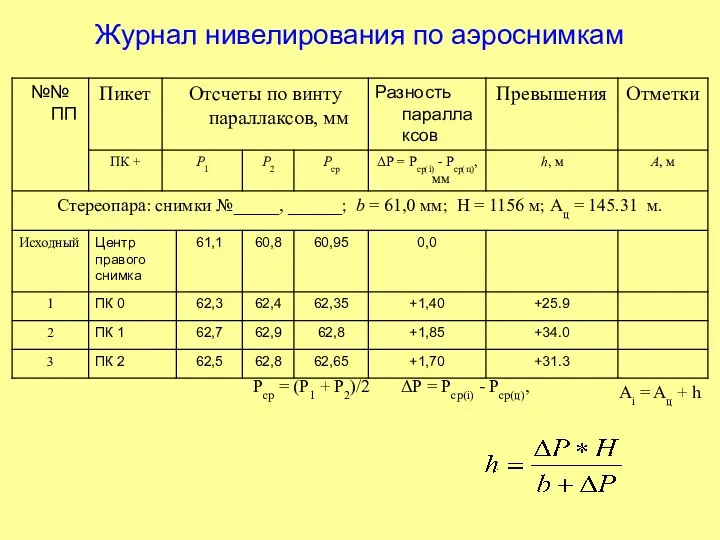
Журнал нивелирования по аэроснимкам
Pср = (P1 + P2)/2
ΔР = Pср(i) -
Журнал нивелирования по аэроснимкам
Pср = (P1 + P2)/2
ΔР = Pср(i) -
Трансформирование аэроснимков
Трансформирование - преобразование центральной перспективной (α > 3°) проекции снимков
Трансформирование аэроснимков
Трансформирование - преобразование центральной перспективной (α > 3°) проекции снимков
Трансформирование аэроснимков
Аналитическое трансформирование по формулам при измерении координат и параллаксов на
Трансформирование аэроснимков
Аналитическое трансформирование по формулам при измерении координат и параллаксов на
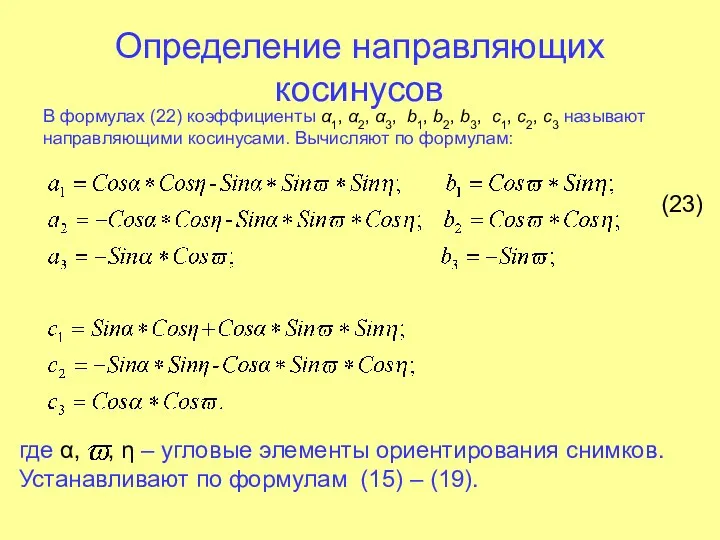
Определение направляющих косинусов
(23)
Определение направляющих косинусов
(23)
Трансформирование аэроснимков
2. Фотомеханический: на приборах – фототрансформаторах с получением трансформированных снимков;
2.1.
Трансформирование аэроснимков
2. Фотомеханический: на приборах – фототрансформаторах с получением трансформированных снимков;
2.1.
Трансформирование аэроснимков
3. Оптико-графический: на приборах – фототрансформаторах с перерисовкой изображений в
Трансформирование аэроснимков
3. Оптико-графический: на приборах – фототрансформаторах с перерисовкой изображений в
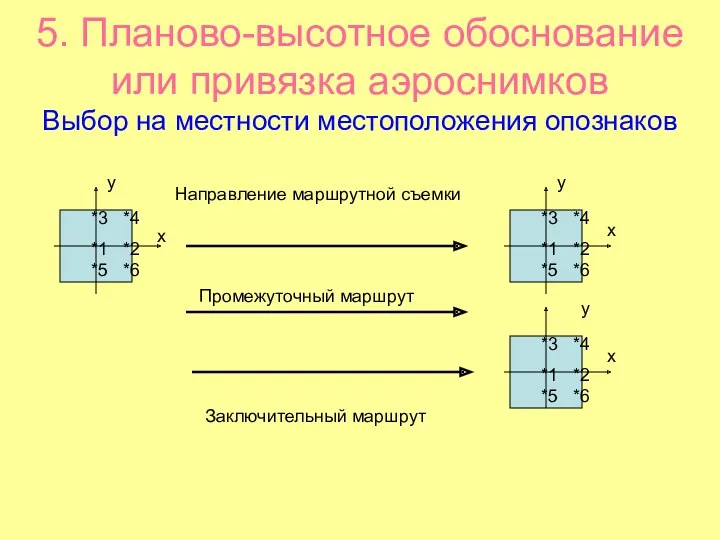
5. Планово-высотное обоснование или привязка аэроснимков
Выбор на местности местоположения опознаков
*3 *4
*1
5. Планово-высотное обоснование или привязка аэроснимков
Выбор на местности местоположения опознаков
*3 *4
*1
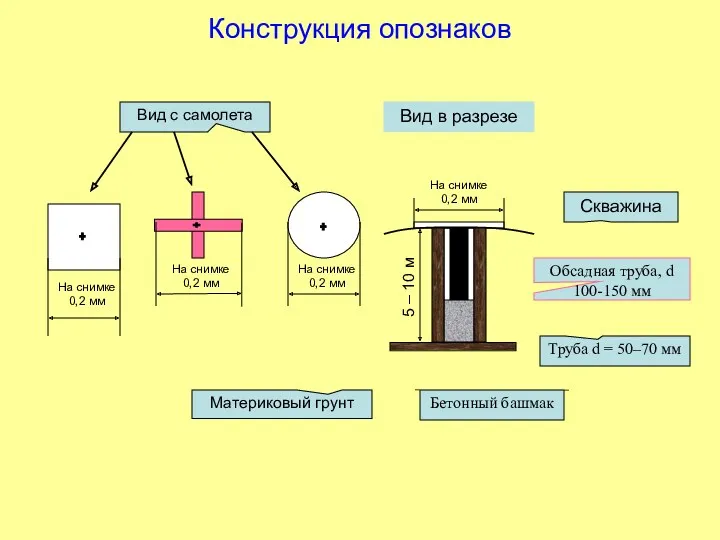
Конструкция опознаков
5 – 10 м
На снимке 0,2 мм
Скважина
Труба d = 50–70
Конструкция опознаков
5 – 10 м
На снимке 0,2 мм
Скважина
Труба d = 50–70

Теодолитные хода повышенной точности (полигонометрия)
А
D
С
В
n
3
2
1
βB
β2
β3
βn
βC
β1
αAB = αH
αCD= αK
dB1
d12
d23
d3n
dnC
Xi+1 = Xi +
Теодолитные хода повышенной точности (полигонометрия)
А
D
С
В
n
3
2
1
βB
β2
β3
βn
βC
β1
αAB = αH
αCD= αK
dB1
d12
d23
d3n
dnC
Xi+1 = Xi +

Нивелирование опознаков
СА
ВА
n
3
2
1
hB1
Направление хода
h12
h23
h3n
hnC
AB = AH
AC = AK
Ai+1 = Ai +
Нивелирование опознаков
СА
ВА
n
3
2
1
hB1
Направление хода
h12
h23
h3n
hnC
AB = AH
AC = AK
Ai+1 = Ai +
Триангуляция (трилатерация) или аналитические сети
А
D
С
В
Направление на север
3
2
1
4
n
βB1
β23
β3
βn
βC
β1
β12
β1
βB2
β21
β22
β3
β4
β4
β4
β4
βn
βn
βC
βA1
βD
dB1
d12
d4C
d3n
dnC
dB2
d14
d13
d24
dA2
d4n
dnD
X
X
αAB = αH
αCD= αK
dAB
1
2
3
4
5
6
7
Для треугольника
Триангуляция (трилатерация) или аналитические сети
А
D
С
В
Направление на север
3
2
1
4
n
βB1
β23
β3
βn
βC
β1
β12
β1
βB2
β21
β22
β3
β4
β4
β4
β4
βn
βn
βC
βA1
βD
dB1
d12
d4C
d3n
dnC
dB2
d14
d13
d24
dA2
d4n
dnD
X
X
αAB = αH
αCD= αK
dAB
1
2
3
4
5
6
7
Для треугольника
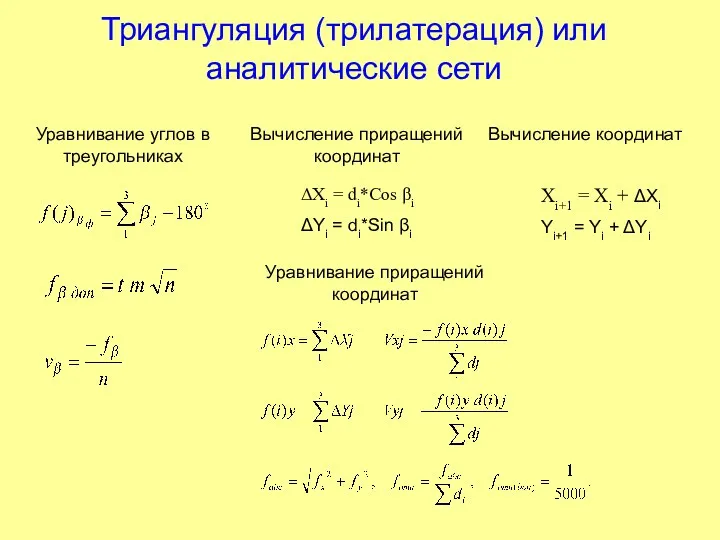
Триангуляция (трилатерация) или аналитические сети
ΔXi = di*Cos βi
ΔYi = di*Sin βi
Xi+1
Триангуляция (трилатерация) или аналитические сети
ΔXi = di*Cos βi
ΔYi = di*Sin βi
Xi+1
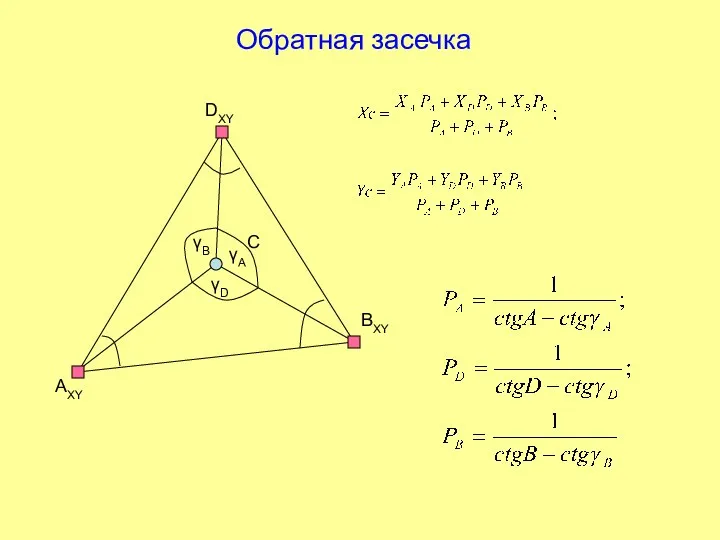
Обратная засечка
АXY
С
ВXY
DXY
γB
γD
γА
Обратная засечка
АXY
С
ВXY
DXY
γB
γD
γА
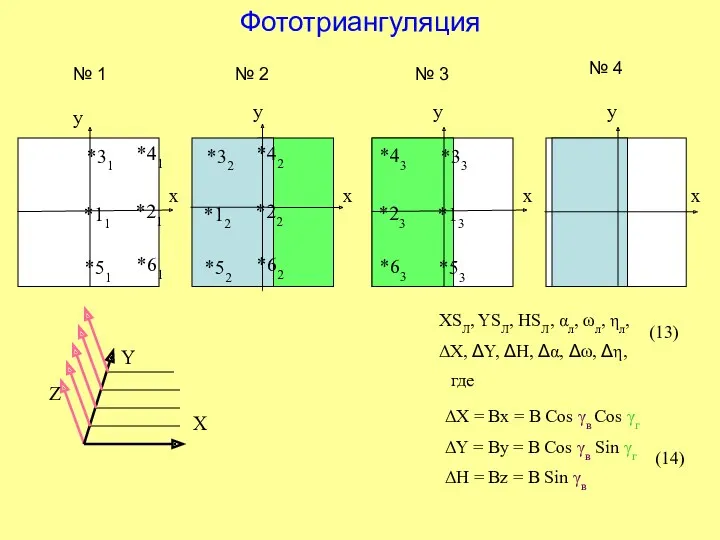
Фототриангуляция
y
№ 1
x
y
x
№ 2
№ 3
x
y
№ 4
*31
*41
*51
*61
*11
*21
x
y
*32
*52
*12
*42
*62
*22
*43
*63
*23
X
Y
Z
XSЛ, YSЛ, HSЛ, αл, ωл, ηл,
ΔX, ΔY,
Фототриангуляция
y
№ 1
x
y
x
№ 2
№ 3
x
y
№ 4
*31
*41
*51
*61
*11
*21
x
y
*32
*52
*12
*42
*62
*22
*43
*63
*23
X
Y
Z
XSЛ, YSЛ, HSЛ, αл, ωл, ηл,
ΔX, ΔY,
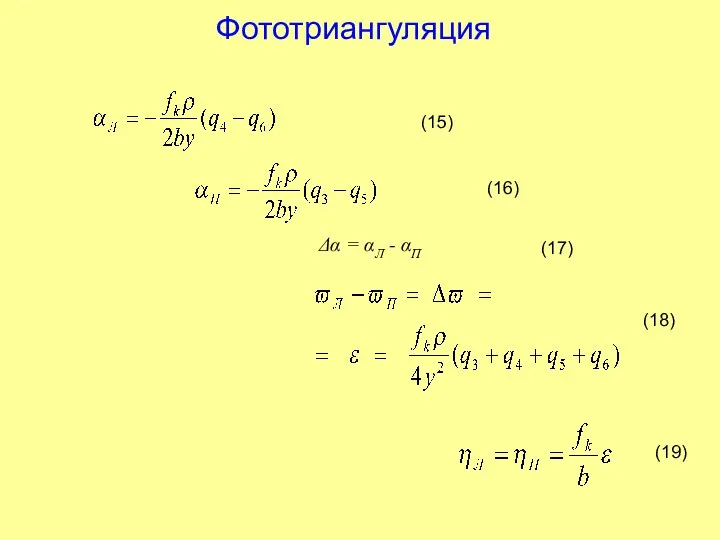
Фототриангуляция
Δα = αЛ - αП
(15)
(16)
(17)
(18)
(19)
Фототриангуляция
Δα = αЛ - αП
(15)
(16)
(17)
(18)
(19)
6. Применение электронной геодезической техники и спутниковые методы геодезических измерений
6. Применение электронной геодезической техники и спутниковые методы геодезических измерений

Привязка снимков электронным теодолитом
Режим прямой геодезической задачи
di = Di
Привязка снимков электронным теодолитом
Режим прямой геодезической задачи
di = Di
Привязка снимков электронным теодолитом
1. Угловая невязка:: fβ = αk - αCD
Привязка снимков электронным теодолитом
1. Угловая невязка:: fβ = αk - αCD
Спутниковые методы привязки снимков
ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система;
NAVSTAR –
Спутниковые методы привязки снимков
ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система;
NAVSTAR –

Космический сегмент
ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система
24 спутника на 3-х орбитальных
Космический сегмент
ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система
24 спутника на 3-х орбитальных

Космический сегмент
NAVSTAR – GPS – NAVigation Sistem with Time And Rangiring
Космический сегмент
NAVSTAR – GPS – NAVigation Sistem with Time And Rangiring

Сегмент контроля и управления
ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система
ЦУС - центр
Сегмент контроля и управления
ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система
ЦУС - центр
Сегмент контроля и управления
Станция слежения
Контроль траектории движения и часов спутника
Главная станция
Сегмент контроля и управления
Станция слежения
Контроль траектории движения и часов спутника
Главная станция
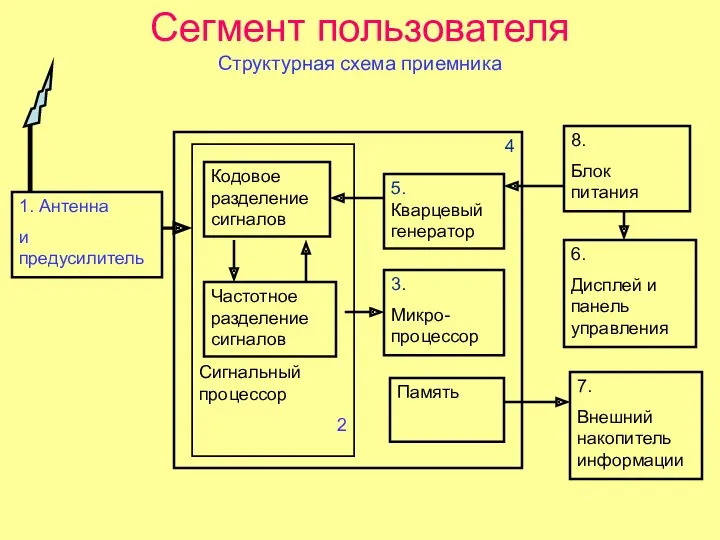
Сегмент пользователя
Структурная схема приемника
Частотное разделение сигналов
Кодовое разделение сигналов
Сегмент пользователя
Структурная схема приемника
Частотное разделение сигналов
Кодовое разделение сигналов
Сегмент пользователя
Структурная схема приемника
Антена с предусилителем;
Идентификатор сигралов и распределение частот
Сегмент пользователя
Структурная схема приемника
Антена с предусилителем;
Идентификатор сигралов и распределение частот
Сегмент пользователя
Классификация приемников по кодировке сигнала:
C/A код;
C/A код + фазовые
Сегмент пользователя
Классификация приемников по кодировке сигнала:
C/A код;
C/A код + фазовые
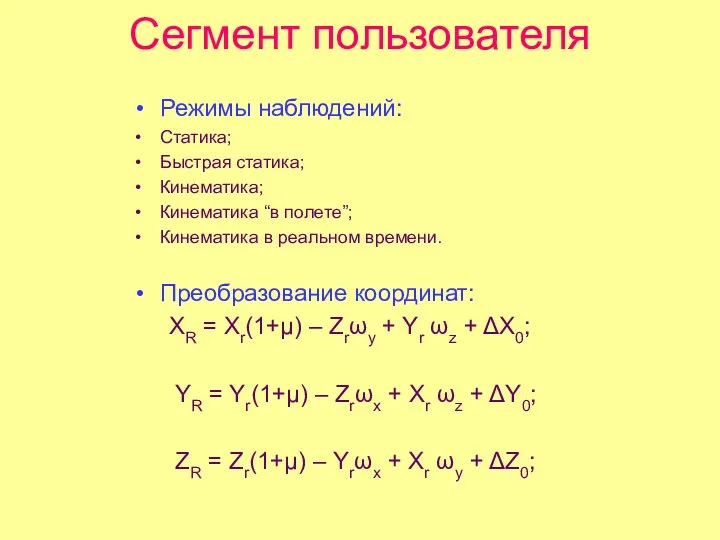
Сегмент пользователя
Режимы наблюдений:
Статика;
Быстрая статика;
Кинематика;
Кинематика “в полете”;
Кинематика в реальном времени.
Преобразование координат:
XR =
Сегмент пользователя
Режимы наблюдений:
Статика;
Быстрая статика;
Кинематика;
Кинематика “в полете”;
Кинематика в реальном времени.
Преобразование координат:
XR =
 Каналы Беларусі
Каналы Беларусі Заповедные места Республики Башкортостан
Заповедные места Республики Башкортостан По странам и континентам. Викторина для любознательных
По странам и континентам. Викторина для любознательных Karkaraly national park in Kazakhstan
Karkaraly national park in Kazakhstan Гравиметрия
Гравиметрия Disaster zone. Natural phonomena
Disaster zone. Natural phonomena Жас географ зияткерлік сайісі
Жас географ зияткерлік сайісі Характеристика экономического района США
Характеристика экономического района США Географический диктант
Географический диктант Природные явления
Природные явления Millennium Bridge. London
Millennium Bridge. London Природа Краснодарского края. 8 класс
Природа Краснодарского края. 8 класс Литосфера. Строение Земли
Литосфера. Строение Земли Куеда. Этно-репортаж
Куеда. Этно-репортаж С юбилеем, любимый край! Марийская Республика
С юбилеем, любимый край! Марийская Республика Жердің даму тарихы
Жердің даму тарихы Рельеф Испании
Рельеф Испании федеративное устройство России
федеративное устройство России Піднебесна імперія - Китай
Піднебесна імперія - Китай Явления природы
Явления природы Символы Англии
Символы Англии Каспий теңізі
Каспий теңізі Оңтүстік Корея Республикасы
Оңтүстік Корея Республикасы Silicon Valley
Silicon Valley Государственные символы Республики Татарстан
Государственные символы Республики Татарстан Федеральный Дальневосточный округ
Федеральный Дальневосточный округ Черная Африка. Культурно-исторический регион мира
Черная Африка. Культурно-исторический регион мира 19. Юго-Восточная Азия 11 класс по географии - 14170 - all-biography.ru
19. Юго-Восточная Азия 11 класс по географии - 14170 - all-biography.ru