- Глобальные навигационные спутниковые системы

Содержание
- 2. Основные элементы ГНСС Наземная система управления и контроля (сегмент управления), включающая блоки измерения текущего положения спутников
- 3. Принцип работы ГНСС
- 4. Принцип работы ГНСС
- 5. Действующие ГНСС GPS – Global Positioning System. Принадлежит министерству обороны США. Этот факт, по мнению некоторых
- 6. Действующие ГНСС Galileo – Европейская система, находящаяся на этапе создания спутниковой группировки. В отличие от американской
- 7. QZSS – «Квазизенитная спутниковая система», находящаяся на этапе создания спутниковой группировки – проект трёхспутниковой региональной системы
- 8. Структура GPS Число орбитальных плоскостей 6 Средняя высота орбиты 20 182 км Период обращения 11 ч
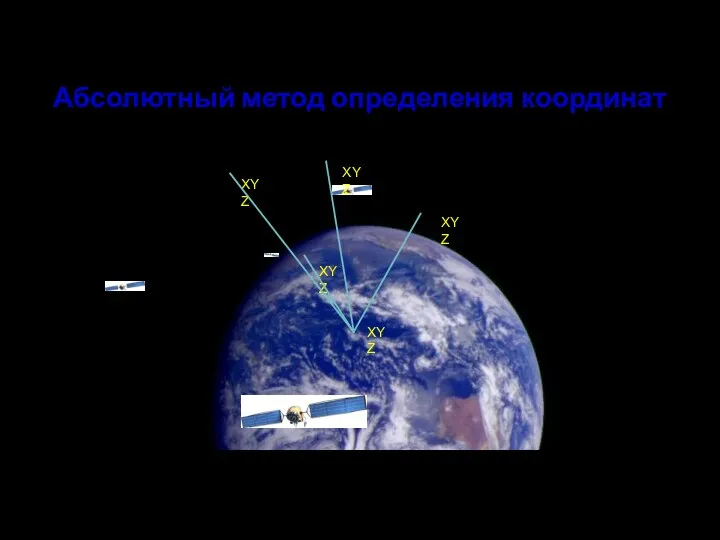
- 9. XYZ XYZ XYZ XYZ Абсолютный метод определения координат XYZ
- 10. Метод определения расстояния от спутника до приемника – кодовый Точность определения координат – от 3 до
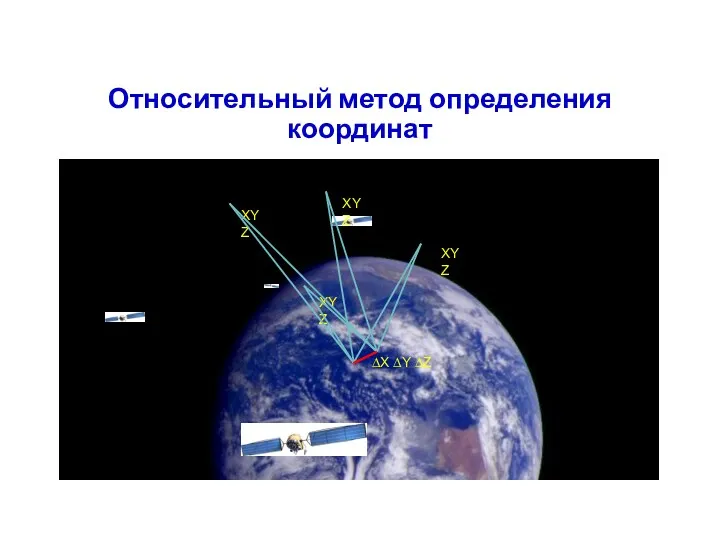
- 11. XYZ XYZ XYZ XYZ ∆X ∆Y ∆Z Относительный метод определения координат
- 12. Метод определения расстояния от спутника до приемника – фазовый Точность определения составляющих вектора – субсантиметровая Относительный
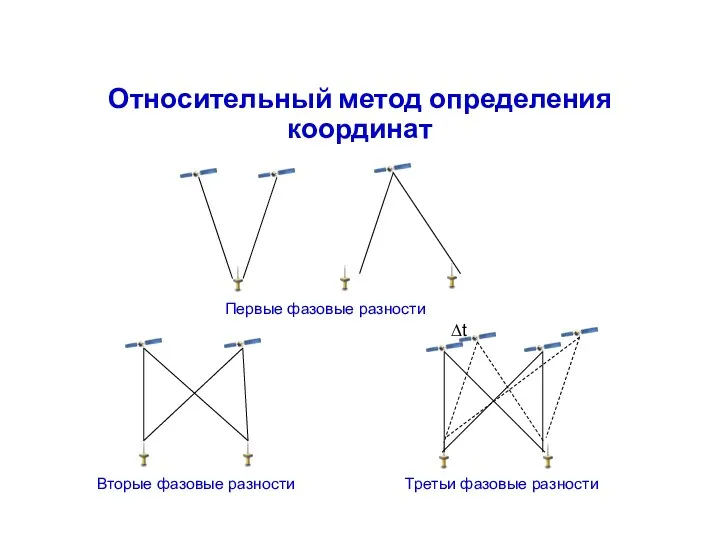
- 13. Первые фазовые разности Вторые фазовые разности Третьи фазовые разности Относительный метод определения координат
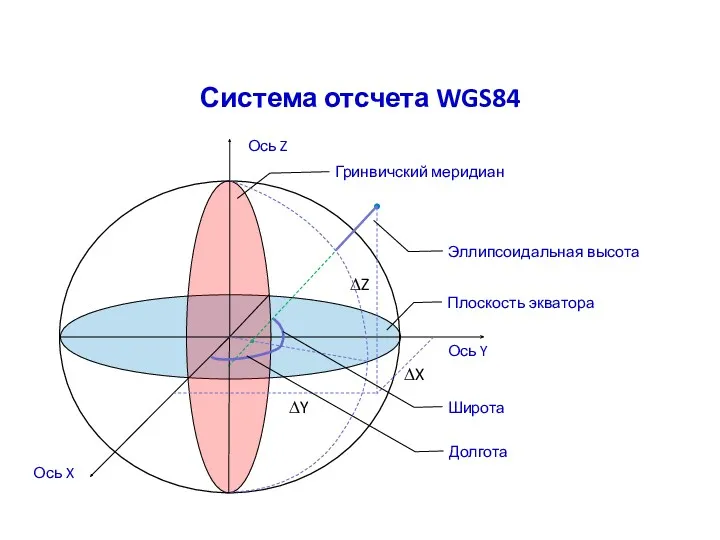
- 14. Система отсчета WGS84 Ось X Ось Y Ось Z Плоскость экватора Гринвичский меридиан ∆X ∆Y ∆Z
- 15. XYZ или BLH XYZ или BLH Плоские к-ты Параметры ИГД Параметры проекции Переход к местным системам
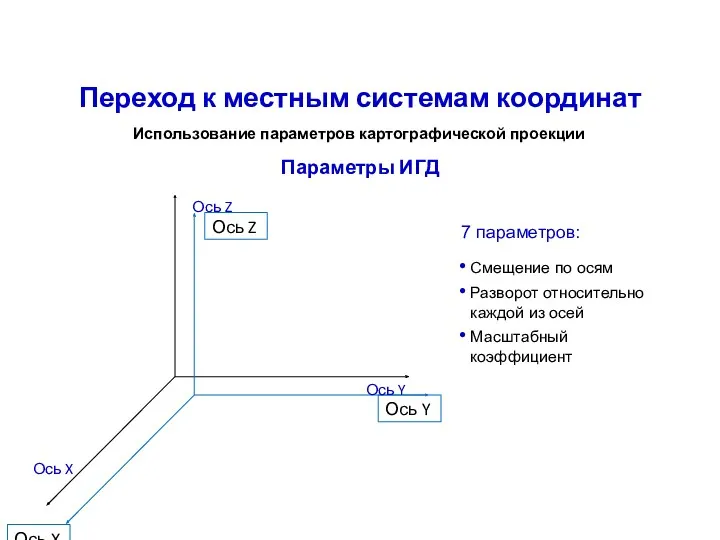
- 16. 7 параметров: Смещение по осям Разворот относительно каждой из осей Масштабный коэффициент Ось X Ось Z
- 17. 5 параметров: Осевой меридиан Широта начала отсчета Условное смещение на восток Условное смещение на север Масштабный
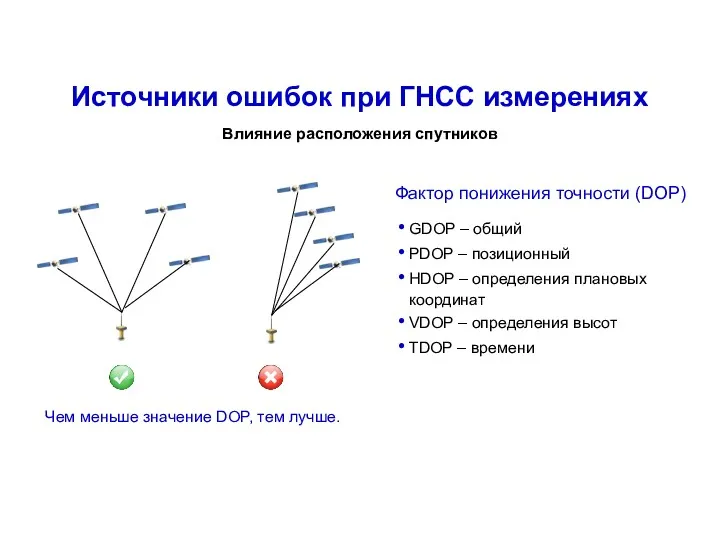
- 18. Фактор понижения точности (DOP) GDOP – общий PDOP – позиционный HDOP – определения плановых координат VDOP
- 19. Вычисленная орбита Ошибка устраняется за счет использования точных эфемерид. Величина ошибки Абсолютный метод – 2-50 метров
- 20. Величина ошибки Абсолютный метод – 0.5-100 метров Относительный метод – 1 до 50 мм/км Ошибка устраняется
- 21. Величина ошибки Абсолютный метод – мм…см Относительный метод – мм…см Ошибка устраняется за счет правильного выбора
- 22. По типу используемой ГНСС Односистемное Основные виды оборудования ГНСС Классификация GPS ГЛОНАСС Galileo GPS/ГЛОНАСС GPS/Galileo GPS/ГЛОНАСС/Galileo
- 23. По типу принимаемых сигналов Кодовое Фазовое Основные виды оборудования ГНСС Классификация
- 24. По количеству частот Основные виды оборудования ГНСС Классификация Одночастотное L1 Двухчастотное L1/L2 Многочастотное L1/L2/L5
- 25. По назначению оборудования Основные виды оборудования ГНСС Классификация Навигационное Геодезическое ГИС ОЕМ
- 26. По конструкции Основные виды оборудования ГНСС Классификация Модульное Интегрированное ОЕМ
- 27. Статика и быстрая статика Виды работ, выполняемых ГНСС оборудованием Получение координат – после обработки Вид работ
- 28. Получение координат – в момент измерения Доп. условие – передача корректирующей информации Вид работ – съемка
- 29. Получение координат – в момент измерения Доп. условие – передача корректирующей информации Вид работ – съемка
- 30. Обязательные условия: Хорошие условия приема сигналов на базовом приемнике (открытая местность с минимальным числом помех) Обязательное
- 31. Плюсы: Нет оплаты услуг связи Работает в любой точке Земли Нет ограничения количества подключений Минусы: Требует
- 32. Плюсы: Работы на больших расстояниях (до 50 км) Минусы: Поминутная тарификация Зона обслуживания зависит от сотового
- 33. Плюсы: Работы на больших расстояниях (до 50 км) Одновременная работа нескольких пользователей (для встроенного модема до
- 34. Плюсы: Работы на больших расстояниях (до 50 км) Одновременная работа нескольких пользователей Тарификация за принятый трафик
- 35. X 2 X 2 X 2 ГНСС приемник Адаптер трегера Трегер Деревянный штатив (тяжелый) X 2
- 36. ГНСС приемник Адаптер трегера Трегер (с оптическим центриром) Деревянный штатив (стандартный) Внешний GSM модем… …или внешний
- 37. RTK ровер ГНСС приемник Веха Полевой контроллер с ПО Крепление контроллера на веху Кабель приемник-контроллер Трипод
- 41. Скачать презентацию
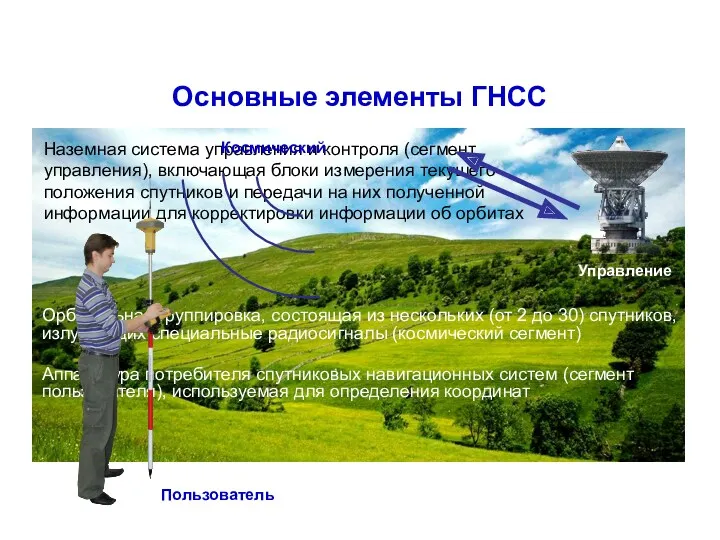
Основные элементы ГНСС
Наземная система управления и контроля (сегмент управления), включающая блоки
Основные элементы ГНСС
Наземная система управления и контроля (сегмент управления), включающая блоки

Принцип работы ГНСС
Принцип работы ГНСС

Принцип работы ГНСС
Принцип работы ГНСС

Действующие ГНСС
GPS – Global Positioning System. Принадлежит министерству обороны США. Этот
Действующие ГНСС
GPS – Global Positioning System. Принадлежит министерству обороны США. Этот

Действующие ГНСС
Galileo – Европейская система, находящаяся на этапе создания спутниковой группировки.
Действующие ГНСС
Galileo – Европейская система, находящаяся на этапе создания спутниковой группировки.
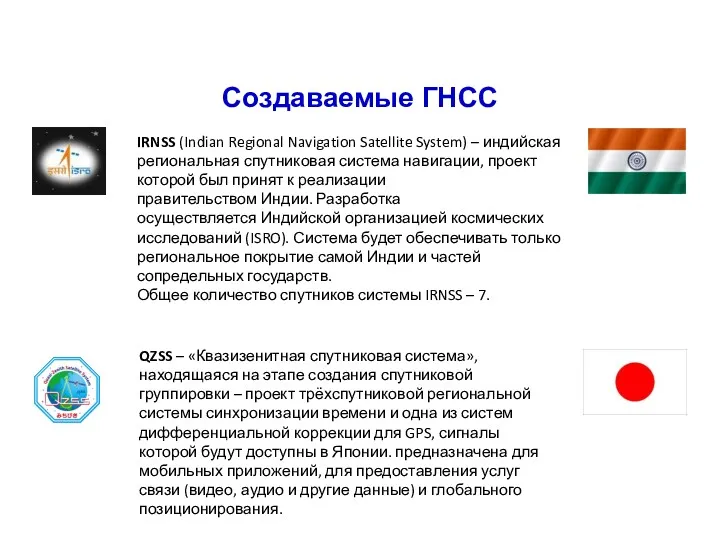
QZSS – «Квазизенитная спутниковая система», находящаяся на этапе создания спутниковой группировки
QZSS – «Квазизенитная спутниковая система», находящаяся на этапе создания спутниковой группировки
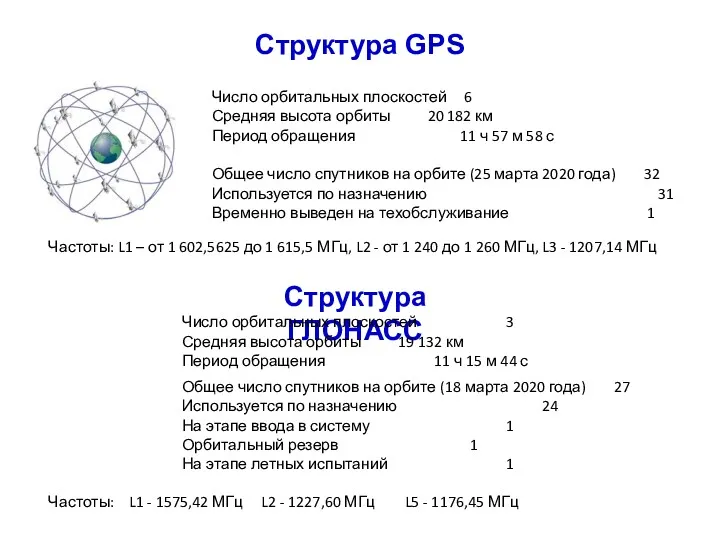
Структура GPS
Число орбитальных плоскостей 6
Средняя высота орбиты 20 182 км
Период обращения 11
Структура GPS
Число орбитальных плоскостей 6
Средняя высота орбиты 20 182 км
Период обращения 11
XYZ
XYZ
XYZ
XYZ
Абсолютный метод определения координат
XYZ
XYZ
XYZ
XYZ
XYZ
Абсолютный метод определения координат
XYZ

Метод определения расстояния
от спутника до приемника – кодовый
Точность определения координат –
Метод определения расстояния
от спутника до приемника – кодовый
Точность определения координат –
XYZ
XYZ
XYZ
XYZ
∆X ∆Y ∆Z
Относительный метод определения координат
XYZ
XYZ
XYZ
XYZ
∆X ∆Y ∆Z
Относительный метод определения координат

Метод определения расстояния от спутника до приемника – фазовый
Точность определения
Метод определения расстояния от спутника до приемника – фазовый
Точность определения
Первые фазовые разности
Вторые фазовые разности
Третьи фазовые разности
Относительный метод определения координат
Первые фазовые разности
Вторые фазовые разности
Третьи фазовые разности
Относительный метод определения координат
Система отсчета WGS84
Ось X
Ось Y
Ось Z
Плоскость экватора
Гринвичский меридиан
∆X
∆Y
∆Z
Эллипсоидальная высота
Широта
Долгота
Система отсчета WGS84
Ось X
Ось Y
Ось Z
Плоскость экватора
Гринвичский меридиан
∆X
∆Y
∆Z
Эллипсоидальная высота
Широта
Долгота

XYZ
или
BLH
XYZ
или
BLH
Плоские к-ты
Параметры
ИГД
Параметры
проекции
Переход к местным системам координат
Использование параметров
XYZ
или
BLH
XYZ
или
BLH
Плоские к-ты
Параметры
ИГД
Параметры
проекции
Переход к местным системам координат
Использование параметров
7 параметров:
Смещение по осям
Разворот относительно каждой из осей
Масштабный коэффициент
Ось X
Ось
7 параметров:
Смещение по осям
Разворот относительно каждой из осей
Масштабный коэффициент
Ось X
Ось

5 параметров:
Осевой меридиан
Широта начала отсчета
Условное смещение на восток
Условное смещение на
5 параметров:
Осевой меридиан
Широта начала отсчета
Условное смещение на восток
Условное смещение на
Фактор понижения точности (DOP)
GDOP – общий
PDOP – позиционный
HDOP – определения плановых
Фактор понижения точности (DOP)
GDOP – общий
PDOP – позиционный
HDOP – определения плановых
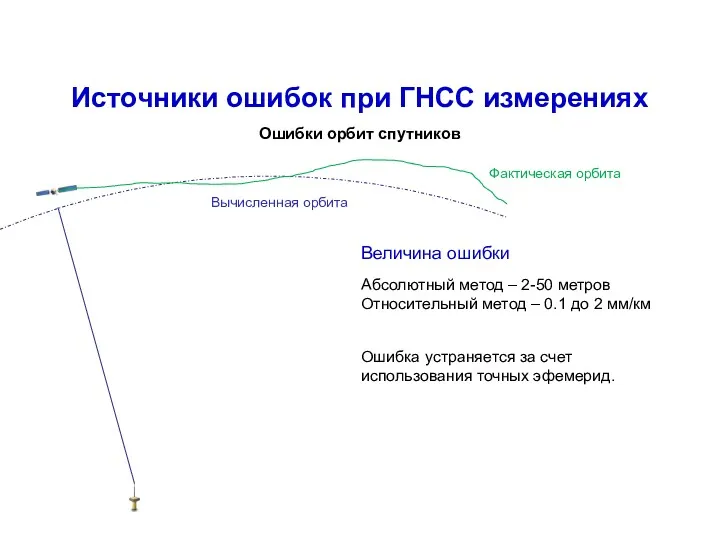
Вычисленная орбита
Ошибка устраняется за счет использования точных эфемерид.
Величина ошибки
Абсолютный метод –
Вычисленная орбита
Ошибка устраняется за счет использования точных эфемерид.
Величина ошибки
Абсолютный метод –
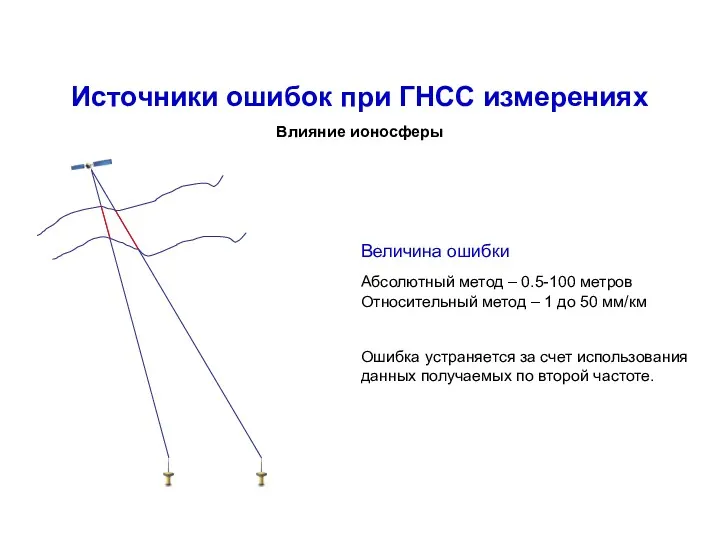
Величина ошибки
Абсолютный метод – 0.5-100 метров
Относительный метод – 1 до 50
Величина ошибки
Абсолютный метод – 0.5-100 метров
Относительный метод – 1 до 50

Величина ошибки
Абсолютный метод – мм…см
Относительный метод – мм…см
Ошибка устраняется за счет
Величина ошибки
Абсолютный метод – мм…см
Относительный метод – мм…см
Ошибка устраняется за счет
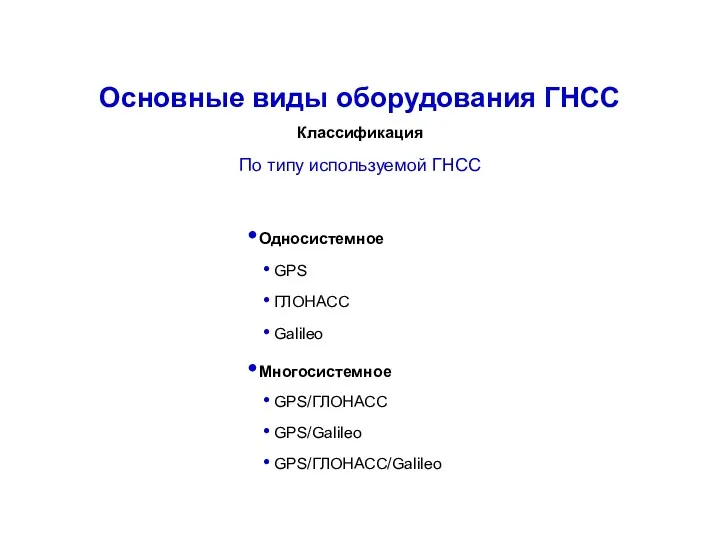
По типу используемой ГНСС
Односистемное
Основные виды оборудования ГНСС
Классификация
GPS
ГЛОНАСС
Galileo
GPS/ГЛОНАСС
GPS/Galileo
GPS/ГЛОНАСС/Galileo
Многосистемное
По типу используемой ГНСС
Односистемное
Основные виды оборудования ГНСС
Классификация
GPS
ГЛОНАСС
Galileo
GPS/ГЛОНАСС
GPS/Galileo
GPS/ГЛОНАСС/Galileo
Многосистемное

По типу принимаемых сигналов
Кодовое
Фазовое
Основные виды оборудования ГНСС
Классификация
По типу принимаемых сигналов
Кодовое
Фазовое
Основные виды оборудования ГНСС
Классификация
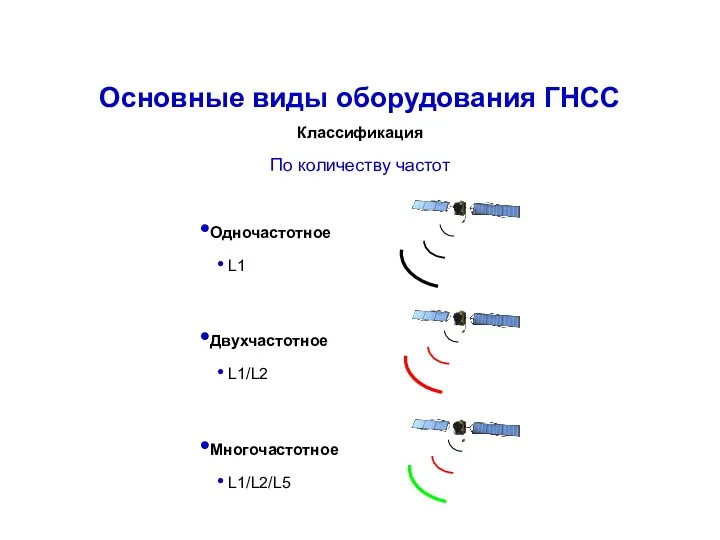
По количеству частот
Основные виды оборудования ГНСС
Классификация
Одночастотное
L1
Двухчастотное
L1/L2
Многочастотное
L1/L2/L5
По количеству частот
Основные виды оборудования ГНСС
Классификация
Одночастотное
L1
Двухчастотное
L1/L2
Многочастотное
L1/L2/L5

По назначению оборудования
Основные виды оборудования ГНСС
Классификация
Навигационное
Геодезическое
ГИС
ОЕМ
По назначению оборудования
Основные виды оборудования ГНСС
Классификация
Навигационное
Геодезическое
ГИС
ОЕМ

По конструкции
Основные виды оборудования ГНСС
Классификация
Модульное
Интегрированное
ОЕМ
По конструкции
Основные виды оборудования ГНСС
Классификация
Модульное
Интегрированное
ОЕМ
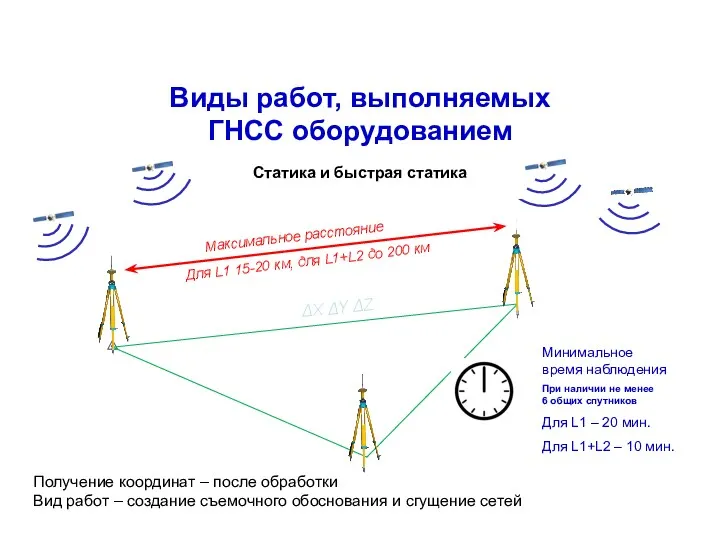
Статика и быстрая статика
Виды работ, выполняемых
ГНСС оборудованием
Получение координат – после обработки
Вид
Статика и быстрая статика
Виды работ, выполняемых
ГНСС оборудованием
Получение координат – после обработки
Вид

Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид
Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид

Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид
Получение координат – в момент измерения
Доп. условие – передача корректирующей информации
Вид
Обязательные условия:
Хорошие условия приема сигналов на базовом приемнике
(открытая местность с
Обязательные условия:
Хорошие условия приема сигналов на базовом приемнике
(открытая местность с

Плюсы:
Нет оплаты услуг связи
Работает в любой точке Земли
Нет
Плюсы:
Нет оплаты услуг связи
Работает в любой точке Земли
Нет

Плюсы:
Работы на больших расстояниях (до 50 км)
Минусы:
Поминутная тарификация
Плюсы:
Работы на больших расстояниях (до 50 км)
Минусы:
Поминутная тарификация

Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких
Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких
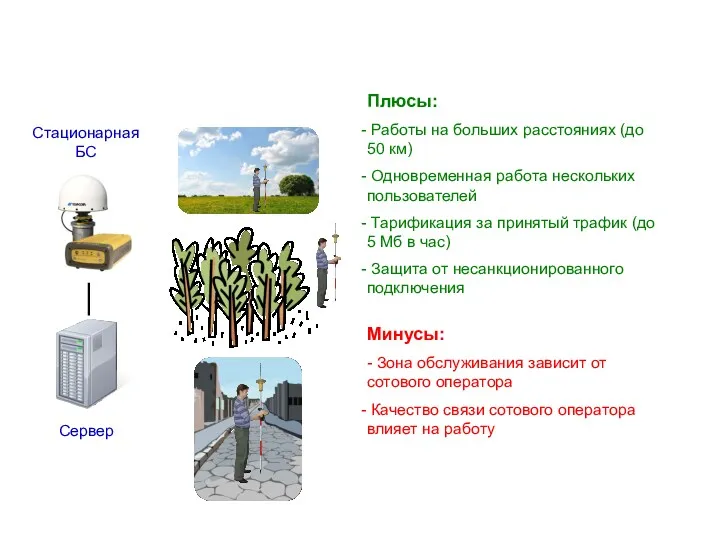
Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких
Плюсы:
Работы на больших расстояниях (до 50 км)
Одновременная работа нескольких

X 2
X 2
X 2
ГНСС приемник
Адаптер трегера
Трегер
Деревянный штатив (тяжелый)
X 2
Дополнительно:
Внешнее питание
Общий принцип
X 2
X 2
X 2
ГНСС приемник
Адаптер трегера
Трегер
Деревянный штатив (тяжелый)
X 2
Дополнительно:
Внешнее питание
Общий принцип

ГНСС приемник
Адаптер трегера
Трегер (с оптическим центриром)
Деревянный штатив (стандартный)
Внешний GSM модем…
…или внешний
ГНСС приемник
Адаптер трегера
Трегер (с оптическим центриром)
Деревянный штатив (стандартный)
Внешний GSM модем…
…или внешний

RTK ровер
ГНСС приемник
Веха
Полевой контроллер с ПО
Крепление контроллера
на веху
Кабель
приемник-контроллер
Трипод или бипод
Принимающий GSM…
…
RTK ровер
ГНСС приемник
Веха
Полевой контроллер с ПО
Крепление контроллера
на веху
Кабель
приемник-контроллер
Трипод или бипод
Принимающий GSM…
…


 Как зарождалась география
Как зарождалась география Населення Південної Америки
Населення Південної Америки География в эпоху Средневековья на Руси
География в эпоху Средневековья на Руси Әлемдегі халқы тығыз орналасқан қалалар Топ - 10
Әлемдегі халқы тығыз орналасқан қалалар Топ - 10 симонова южная сибирь
симонова южная сибирь Форми рельєфу суходолу Землі: гори
Форми рельєфу суходолу Землі: гори Изучение форм рельефа на карте и на местности
Изучение форм рельефа на карте и на местности Город Омск
Город Омск Самарская Лука
Самарская Лука Река Амур
Река Амур Історія виникнення і розвитку топографії і картографії
Історія виникнення і розвитку топографії і картографії Конкурс методических разработок Лучший географический диктант, Цифровой геодиктант 7 класс. Гидросфера
Конкурс методических разработок Лучший географический диктант, Цифровой геодиктант 7 класс. Гидросфера Внутренние воды: озера, болота, подземные воды, ледники, многолетняя мерзлота
Внутренние воды: озера, болота, подземные воды, ледники, многолетняя мерзлота Възможности за опазване на чистотата на природните води в Сливенския район
Възможности за опазване на чистотата на природните води в Сливенския район Египет
Египет Страна Швейцария
Страна Швейцария Размещению большинства природных комплексов на Земле подчинено закону широтной зональности
Размещению большинства природных комплексов на Земле подчинено закону широтной зональности Боливарианская Республика Венесуэла
Боливарианская Республика Венесуэла Военно-промышленный комплекс России
Военно-промышленный комплекс России Карликовые государства Европы
Карликовые государства Европы Эскимосы (интуиты)
Эскимосы (интуиты) Практическая работа Работа с картами 5 класс
Практическая работа Работа с картами 5 класс Евразия. Народы. Страны. 7 класс
Евразия. Народы. Страны. 7 класс Масштаб. Виды масштаба
Масштаб. Виды масштаба Транспортная система Японии
Транспортная система Японии Куеда. Этно-репортаж
Куеда. Этно-репортаж Что внутри планеты Земля
Что внутри планеты Земля Köller
Köller