- Инженерно - геодезические опорные сети

Содержание
- 2. 1. Назначение, виды и особенности построения опорных геодезических сетей. 2. Системы координат и высот, применяемые в
- 3. 1. Назначение, виды и особенности построения опорных геодезических сетей. Опорные сети создаются для обеспе-чения всех видов
- 4. Эти сети служат основой: – для производства топографических съемок при изысканиях; – для выполнения различных работ
- 5. Инженерно-геодезические плановые и высотные опорные сети представляют собой систему геометрических фигур, вершины которых закреплены на местности
- 6. По собранным материалам составляют схему расположения пунктов ранее выполненных опорных сетей всех классов и разрядов в
- 7. Инженерно-геодезические опорные сети обладают рядом характерных особенностей: а) сети часто создаются в условной системе координат; б)
- 8. в) сети имеют ограниченные размеры, часто с незначительным числом фигур или полигонов; г) короткие длины сторон;
- 9. Выбор вида построения и его конфигурация зависит от следующих причин: – типа объекта, его формы и
- 10. Так, триангуляцию применяют на объектах, значительных по площади и протяженности, проектируемых в открытой пересеченной местности. Полигонометрию
- 11. Высотные опорные сети, в основном, создают методом геометрического нивелирования в виде одиночных ходов или полигонов, проложенных
- 12. 2. Системы координат и высот, применяемые в инженерно-геодезических работах Государственные геодезические сети до их уравнивания должны
- 13. Редукционные поправки вводят при выполнении геодезических измерений для того, чтобы получить результаты без искажений. Существуют две
- 14. В целях картографирования геодезические сети проецируются на плоскость в проекции Гаусса-Крюгера (на территории стран СНГ). В
- 15. Высотные сети (государственные и инженерно-геодезические) проектируют и создают в единой системе высот. За начало высот принят
- 16. При определении разности высот поверхности земли методом геометрического нивелирования возникает некоторая неопределенность в значении превышений вследствие
- 17. По предложению М.С. Молоденского, принята система нормальных высот. Нормальные высоты точек отсчитываются по направлениям отвесных линий
- 18. ТЕМА: «ОПРЕДЕЛЕНИЕ ДОПОЛНИТЕЛЬНЫХ ПУНКТОВ»
- 19. 1. Снесение координат с вершин знака на землю. 2. Прямая засечка. 3. Обратная засечка. 4. Линейная
- 20. 1. Снесение координат с вершин знака на землю. Дополнительные пункты определяются наряду со съемочной сетью в
- 21. При привязке полигонометрического (теодолитного) хода к пункту триангуляции, на котором нельзя установить прибор, выбирают на земле
- 23. Второй базис b/ и углы при нем β'1, β'2, используют для контроля определения расстояния АР и
- 24. и расстояние АВ = s (2) Если полученные значения s различаются на две единицы последнего знака,
- 25. 2. Вычисление расстояния АР=d. Недоступное расстояние АР = d определя-ют дважды: (3) где γ = 1800
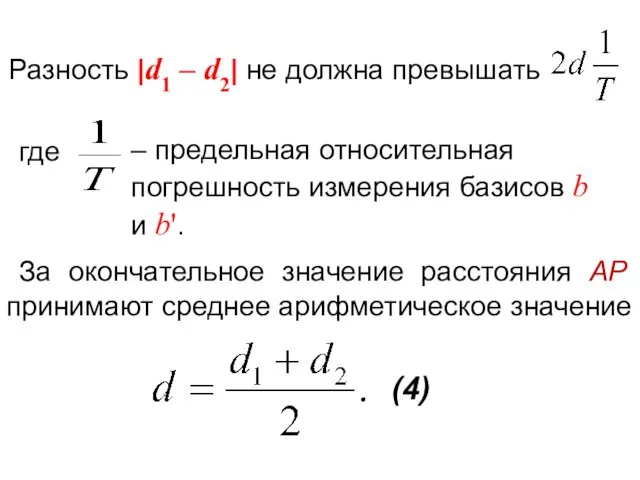
- 26. где За окончательное значение расстояния АР принимают среднее арифметическое значение (4) – предельная относительная погрешность измерения
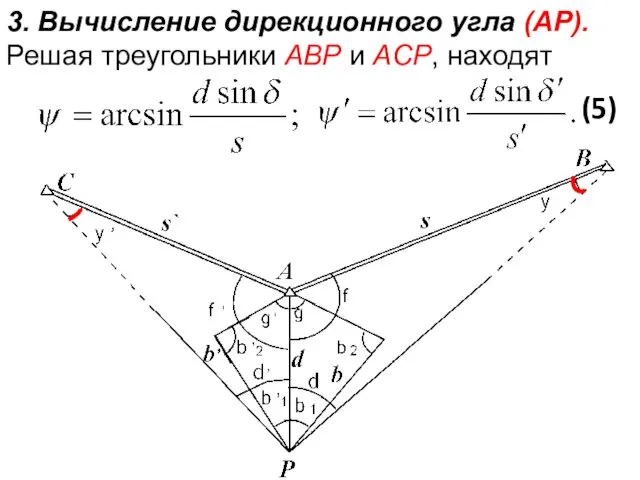
- 27. 3. Вычисление дирекционного угла (AP). Решая треугольники ABP и ACP, находят (5)
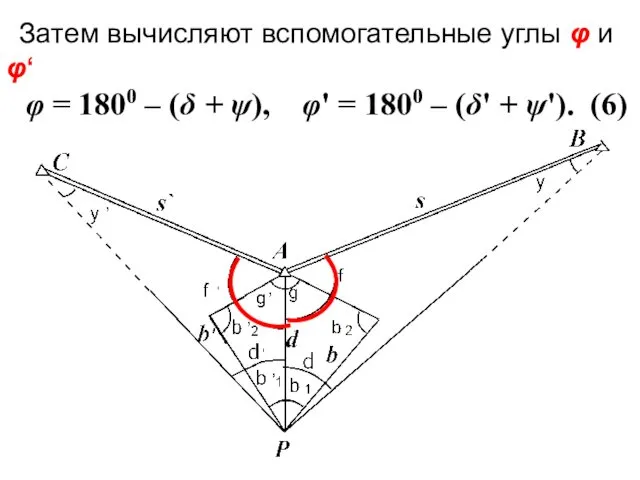
- 28. Затем вычисляют вспомогательные углы φ и φ‘ φ = 1800 – (δ + ψ), φ' =
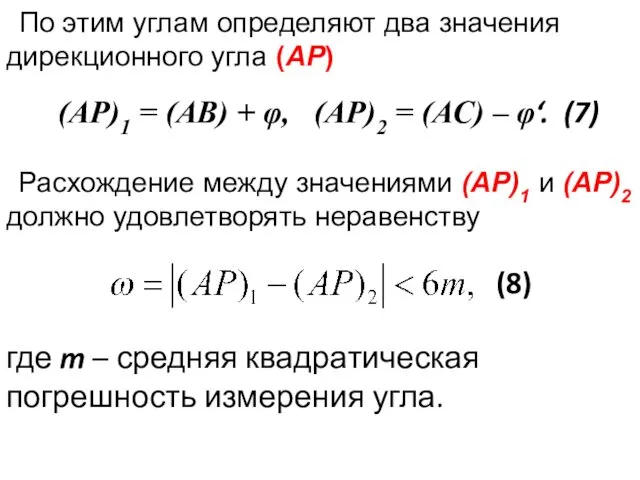
- 29. По этим углам определяют два значения дирекционного угла (AP) (AP)1 = (АВ) + φ, (AP)2 =
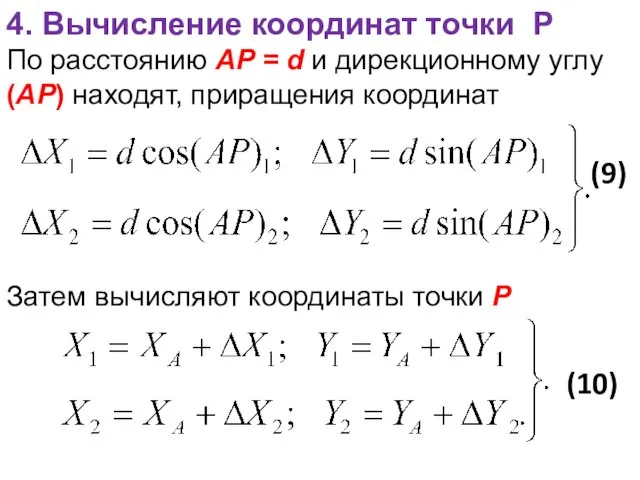
- 30. 4. Вычисление координат точки P По расстоянию AP = d и дирекционному углу (АР) находят, приращения
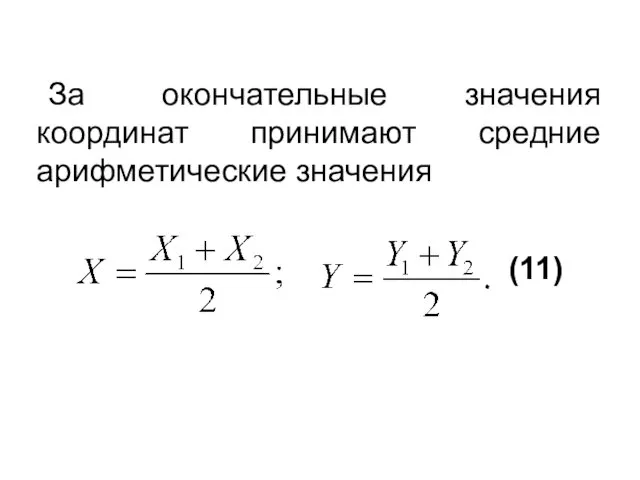
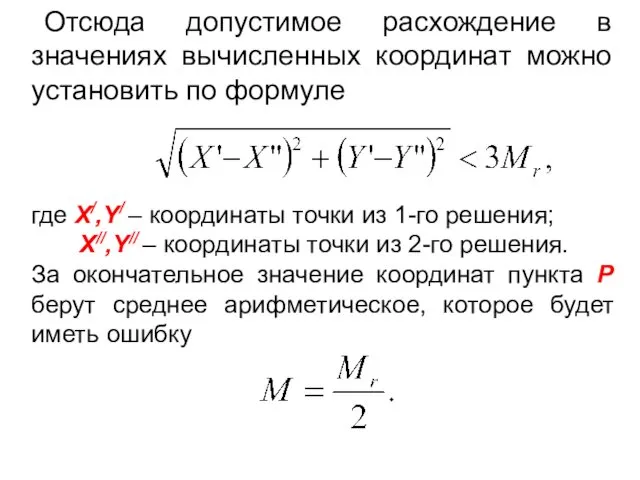
- 31. За окончательные значения координат принимают средние арифметические значения (11)
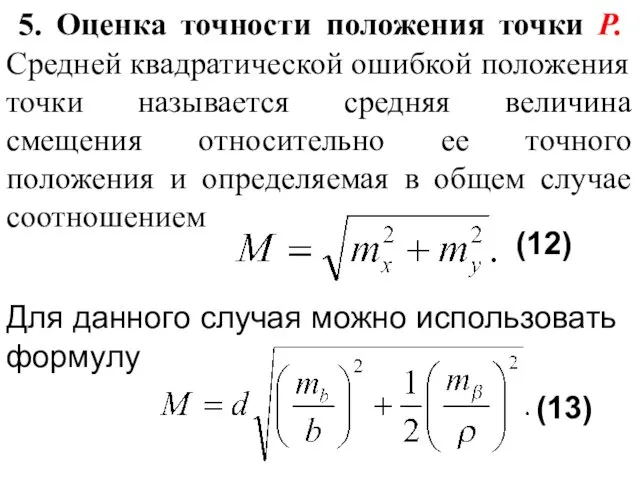
- 32. 5. Оценка точности положения точки Р. Средней квадратической ошибкой положения точки называется средняя величина смещения относительно
- 33. 2. Прямая засечка. Для решения прямой засечки, заключающейся в определении координат третьего пункта по координатам двух
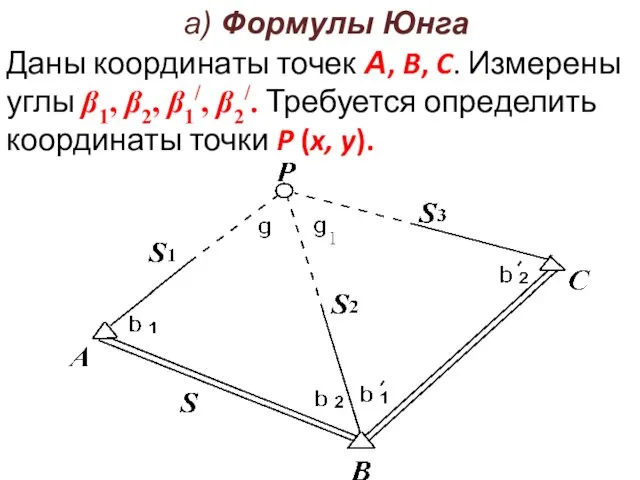
- 34. а) Формулы Юнга Даны координаты точек А, B, C. Измерены углы β1, β2, β1/, β2/. Требуется
- 35. Если встать между исходными пунктами и смотреть на определяемый пункт P, то пункт А будет левым,
- 36. Тогда формулам Юнга можно придать следующий вид: (14) (15) где Λ и П – значения углов
- 37. В целях контроля находят угол γ=1800– β1 – β2, а затем по координатам пункта В (левый)
- 38. Расхождение между абсциссами и ординатами при первом и втором решении должны удовлетворять условию (16) где Мr
- 39. СКО положения пункта Р, определяемого прямой засечкой, вычисляется по формуле где m – СКО измерения углов;
- 40. б) Формулы Гаусса. При определении точки прямой засечкой может не быть видимости между смежными точками А,
- 41. Известны координаты точек А, B, C. Измерены углы 1, 2, 3. Требуется определить координаты точки P
- 42. По измеренным углам и дирекционным углам направлений на другие исходные пункты, находим дирекционные углы направлений на
- 43. Найдем разность Отсюда (21)
- 44. Вместо (19) и (20) можно записать (22) (23)
- 45. Нахождение ординат по двум формулам (22) и (23) позволяет проконтролировать вычисления. Таким образом, формулы (21), (22)
- 46. 3. Обратная засечка (задача Потенота) Сущность обратной засечки заключается в определении положения четвертого пункта (точки стояния)
- 47. На основе трех исходных пунктов задача решается без контроля правильности измерения углов и выборки исходных данных.
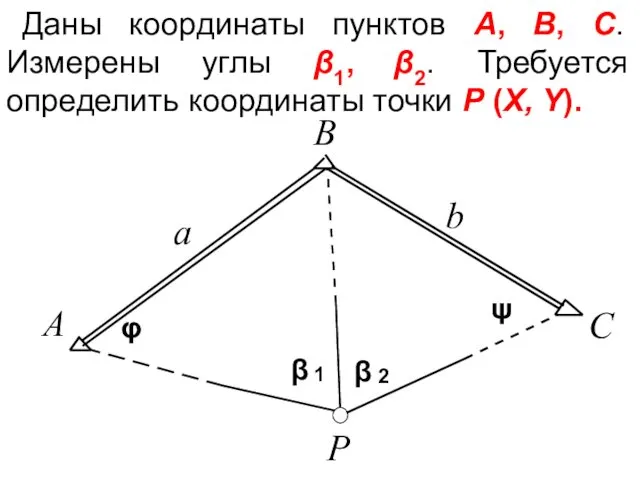
- 48. Даны координаты пунктов А, B, C. Измерены углы β1, β2. Требуется определить координаты точки P (X,
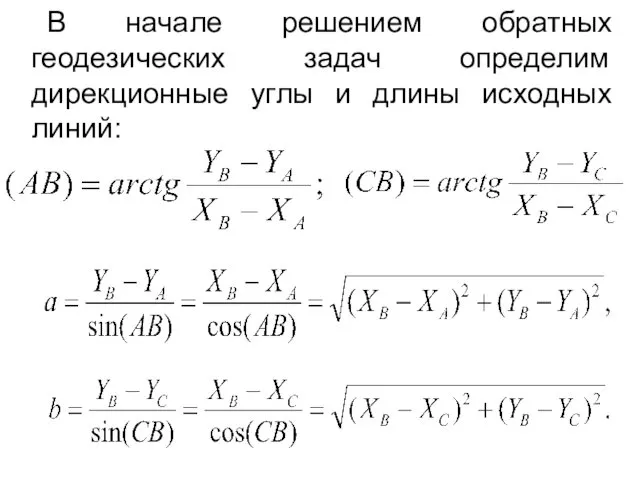
- 49. В начале решением обратных геодезических задач определим дирекционные углы и длины исходных линий:
- 50. Далее задача сводится к определению углов φ и ψ. Определим полусумму углов φ и ψ, которую
- 51. Определим диаметры описанных окруж-ностей около треугольников ABP и BCP: Выразим сторону ВР через Д1, Д2 и
- 52. Разделив две части этого равенства на Д1sin ψ, получим . Образуем пропорцию и введем обозначение N:
- 53. С учетом формул для определения Д1 и Д2 С учетом тригонометрических формул
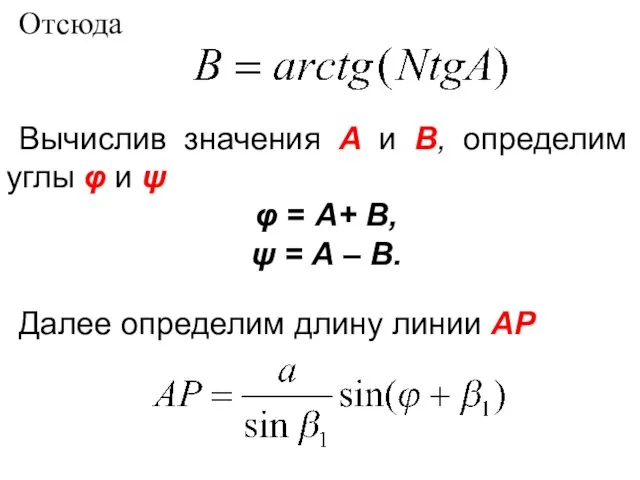
- 54. Отсюда . Вычислив значения А и В, определим углы φ и ψ φ = А+ В,
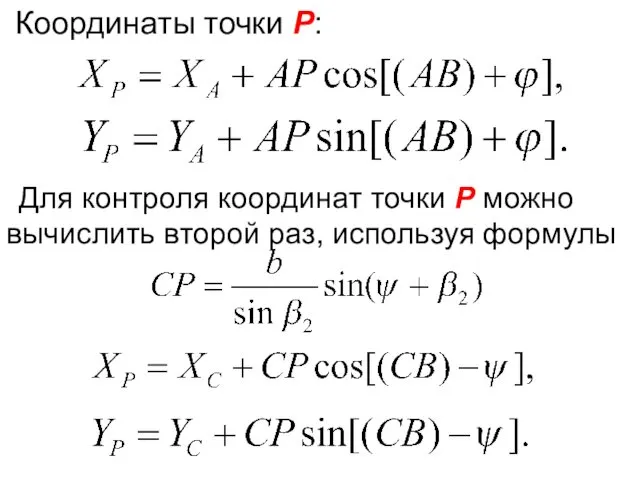
- 55. Координаты точки Р: Для контроля координат точки Р можно вычислить второй раз, используя формулы ,
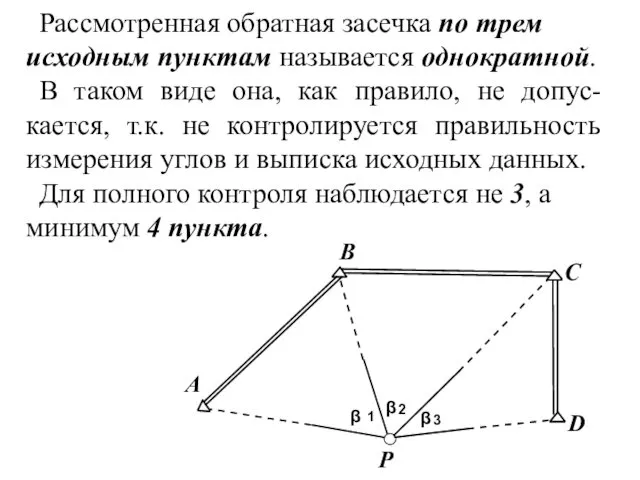
- 56. Рассмотренная обратная засечка по трем исходным пунктам называется однократной. В таком виде она, как правило, не
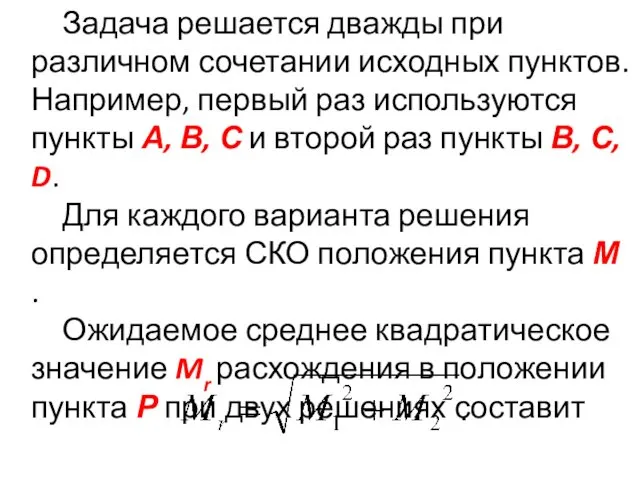
- 57. Задача решается дважды при различном сочетании исходных пунктов. Например, первый раз используются пункты А, В, С
- 58. Отсюда допустимое расхождение в значениях вычисленных координат можно установить по формуле где X/,Y/ – координаты точки
- 59. 4. Линейная засечка. Задача линейной засечки заключается в определении координат третьего пункта по координатам двух исходных
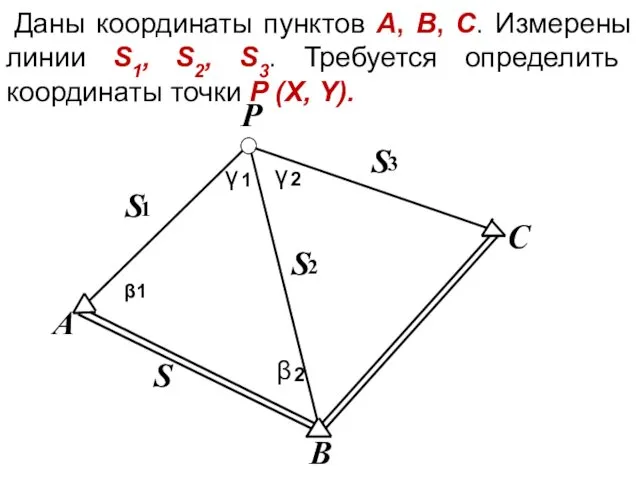
- 60. Даны координаты пунктов А, B, C. Измерены линии S1, S2, S3. Требуется определить координаты точки P
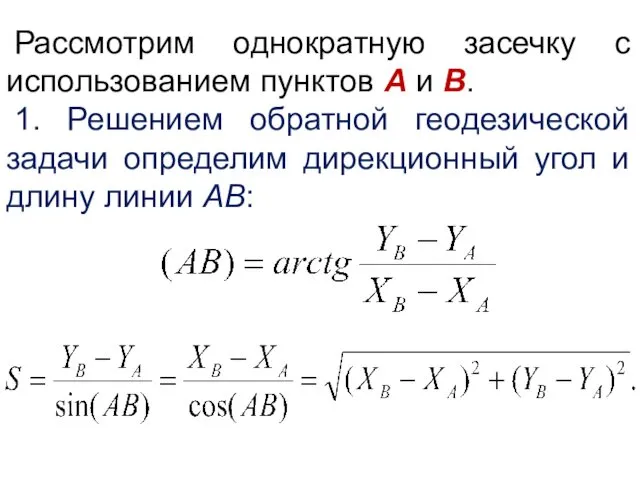
- 61. Рассмотрим однократную засечку с использованием пунктов А и В. 1. Решением обратной геодезической задачи определим дирекционный
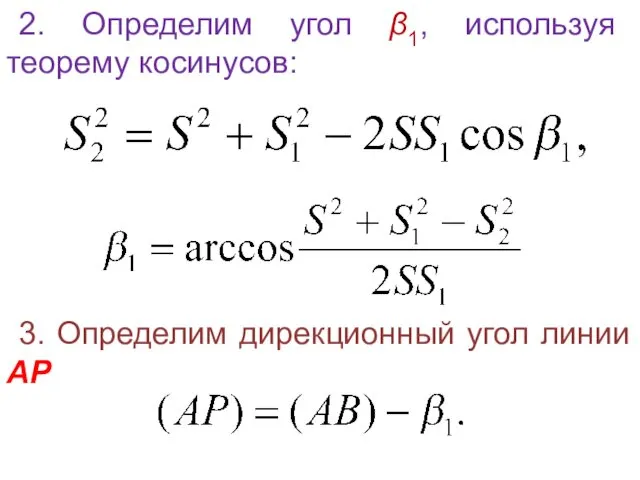
- 62. 2. Определим угол β1, используя теорему косинусов: 3. Определим дирекционный угол линии АР
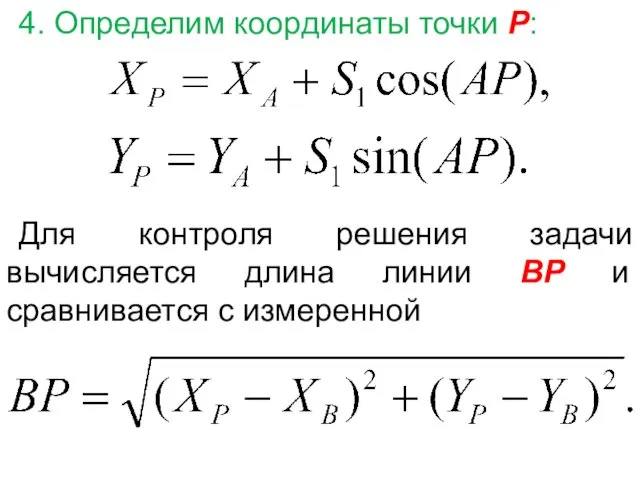
- 63. 4. Определим координаты точки Р: Для контроля решения задачи вычисляется длина линии ВР и сравнивается с
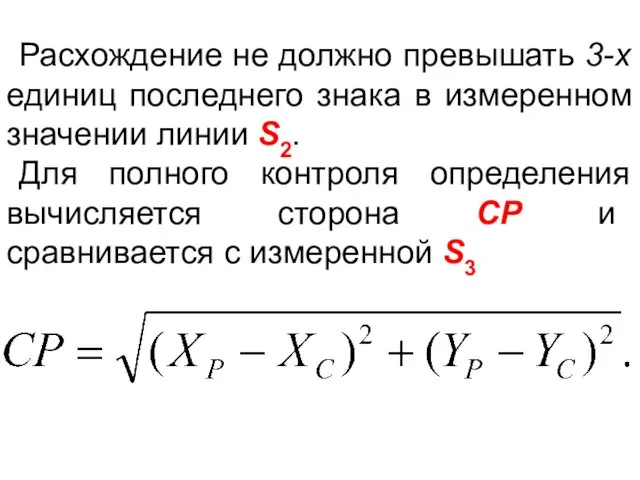
- 64. Расхождение не должно превышать 3-х единиц последнего знака в измеренном значении линии S2. Для полного контроля
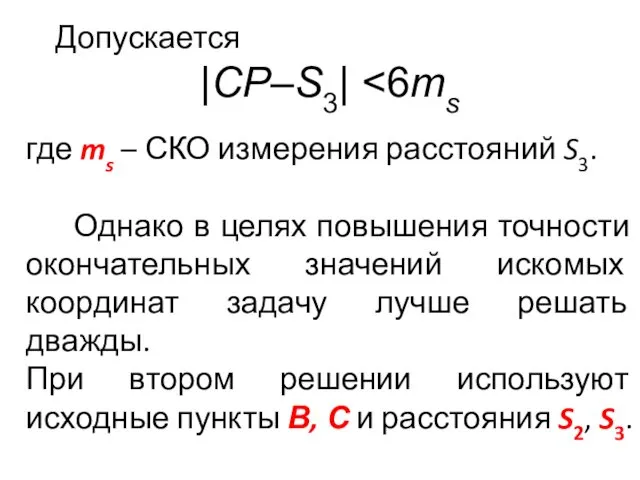
- 65. Допускается |СР–S3| где ms – СКО измерения расстояний S3. Однако в целях повышения точности окончательных значений
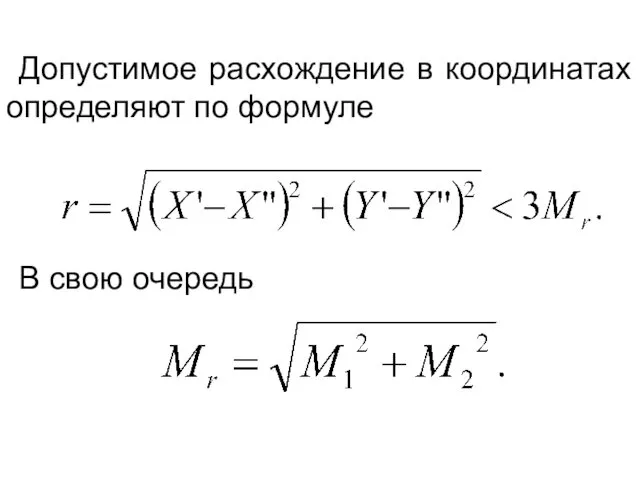
- 66. Допустимое расхождение в координатах определяют по формуле В свою очередь
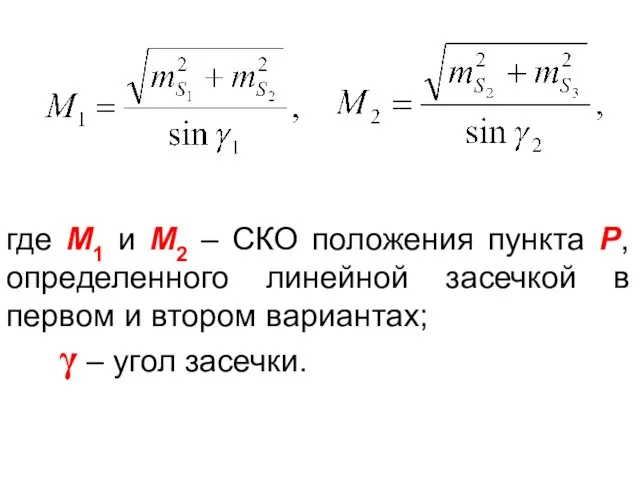
- 67. где М1 и М2 – СКО положения пункта Р, определенного линейной засечкой в первом и втором
- 69. Скачать презентацию
1. Назначение, виды и особенности построения опорных геодезических сетей.
2. Системы координат
1. Назначение, виды и особенности построения опорных геодезических сетей.
2. Системы координат
1. Назначение, виды и особенности построения опорных геодезических сетей.
Опорные сети создаются
1. Назначение, виды и особенности построения опорных геодезических сетей.
Опорные сети создаются
Эти сети служат основой:
– для производства топографических съемок при изысканиях;
Эти сети служат основой:
– для производства топографических съемок при изысканиях;
Инженерно-геодезические плановые и высотные опорные сети представляют собой систему геометрических фигур,
Инженерно-геодезические плановые и высотные опорные сети представляют собой систему геометрических фигур,
По собранным материалам составляют схему расположения пунктов ранее выполненных опорных сетей
По собранным материалам составляют схему расположения пунктов ранее выполненных опорных сетей
Инженерно-геодезические опорные сети обладают рядом характерных особенностей:
а) сети часто создаются
Инженерно-геодезические опорные сети обладают рядом характерных особенностей:
а) сети часто создаются
в) сети имеют ограниченные размеры, часто с незначительным числом фигур или
в) сети имеют ограниченные размеры, часто с незначительным числом фигур или
Выбор вида построения и его конфигурация зависит от следующих причин:
–
Выбор вида построения и его конфигурация зависит от следующих причин:
–
Так, триангуляцию применяют на объектах, значительных по площади и протяженности, проектируемых
Так, триангуляцию применяют на объектах, значительных по площади и протяженности, проектируемых
Высотные опорные сети, в основном, создают методом геометрического нивелирования в виде
Высотные опорные сети, в основном, создают методом геометрического нивелирования в виде
2. Системы координат и высот, применяемые в инженерно-геодезических работах
Государственные геодезические сети
2. Системы координат и высот, применяемые в инженерно-геодезических работах
Государственные геодезические сети
Редукционные поправки вводят при выполнении геодезических измерений для того, чтобы получить
Редукционные поправки вводят при выполнении геодезических измерений для того, чтобы получить
В целях картографирования геодезические сети проецируются на плоскость в проекции Гаусса-Крюгера
В целях картографирования геодезические сети проецируются на плоскость в проекции Гаусса-Крюгера
Высотные сети (государственные и инженерно-геодезические) проектируют и создают в единой системе
Высотные сети (государственные и инженерно-геодезические) проектируют и создают в единой системе
При определении разности высот поверхности земли методом геометрического нивелирования возникает некоторая
При определении разности высот поверхности земли методом геометрического нивелирования возникает некоторая
По предложению М.С. Молоденского, принята система нормальных высот.
Нормальные высоты точек
По предложению М.С. Молоденского, принята система нормальных высот.
Нормальные высоты точек
ТЕМА:
«ОПРЕДЕЛЕНИЕ
ДОПОЛНИТЕЛЬНЫХ ПУНКТОВ»
ТЕМА:
«ОПРЕДЕЛЕНИЕ
ДОПОЛНИТЕЛЬНЫХ ПУНКТОВ»
1. Снесение координат с вершин знака на землю.
2. Прямая засечка.
3. Обратная
1. Снесение координат с вершин знака на землю.
2. Прямая засечка.
3. Обратная
1. Снесение координат с вершин знака на землю.
Дополнительные пункты определяются наряду
1. Снесение координат с вершин знака на землю.
Дополнительные пункты определяются наряду
При привязке полигонометрического (теодолитного) хода к пункту триангуляции, на котором нельзя
При привязке полигонометрического (теодолитного) хода к пункту триангуляции, на котором нельзя
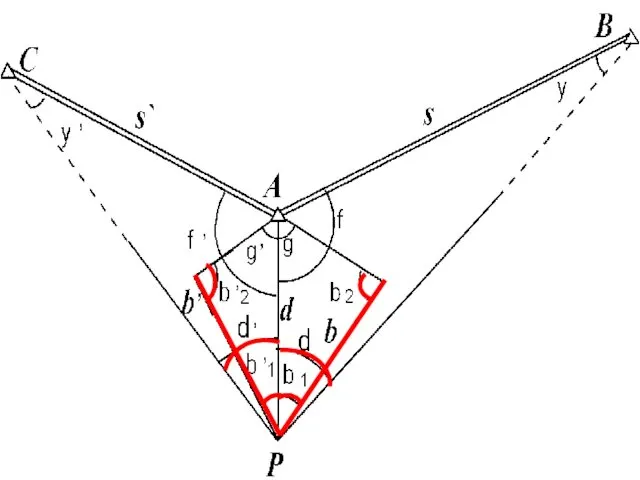
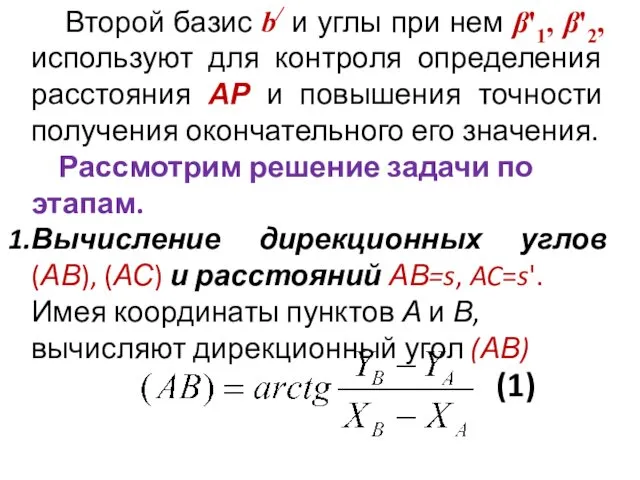
Второй базис b/ и углы при нем β'1, β'2, используют
Второй базис b/ и углы при нем β'1, β'2, используют
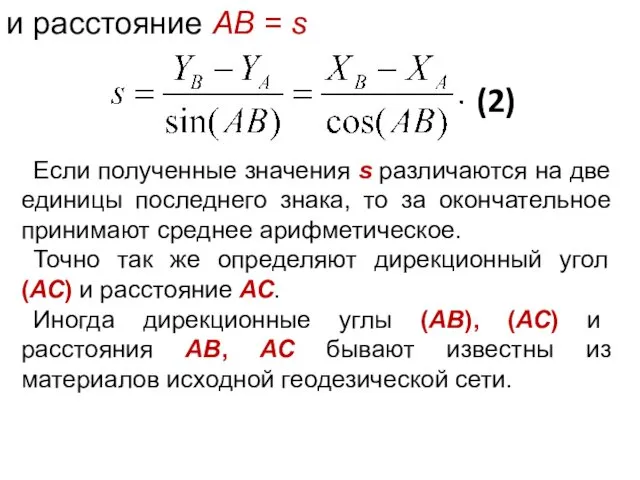
и расстояние АВ = s
(2)
Если полученные значения s различаются на две
и расстояние АВ = s
(2)
Если полученные значения s различаются на две
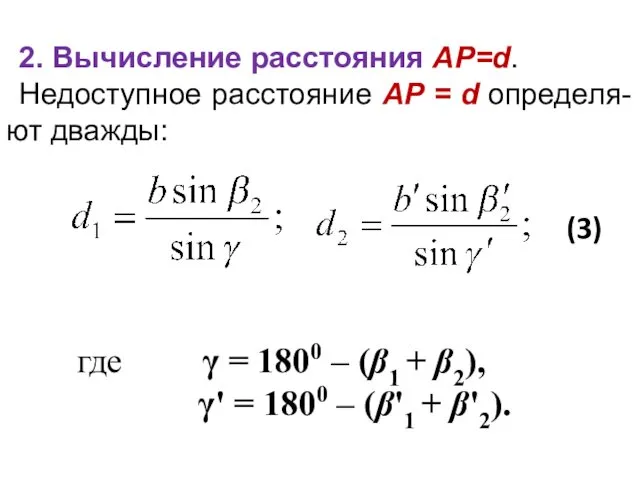
2. Вычисление расстояния АР=d.
Недоступное расстояние АР = d определя-ют дважды:
2. Вычисление расстояния АР=d.
Недоступное расстояние АР = d определя-ют дважды:
где
За окончательное значение расстояния АР принимают среднее арифметическое значение
(4)
– предельная
где
За окончательное значение расстояния АР принимают среднее арифметическое значение
(4)
– предельная
3. Вычисление дирекционного угла (AP).
Решая треугольники ABP и ACP, находят
(5)
3. Вычисление дирекционного угла (AP).
Решая треугольники ABP и ACP, находят
(5)
Затем вычисляют вспомогательные углы φ и φ‘
φ = 1800 – (δ
Затем вычисляют вспомогательные углы φ и φ‘
φ = 1800 – (δ
По этим углам определяют два значения дирекционного угла (AP)
(AP)1 =
По этим углам определяют два значения дирекционного угла (AP)
(AP)1 =
4. Вычисление координат точки P
По расстоянию AP = d и дирекционному
4. Вычисление координат точки P
По расстоянию AP = d и дирекционному
За окончательные значения координат принимают средние арифметические значения
(11)
За окончательные значения координат принимают средние арифметические значения
(11)
5. Оценка точности положения точки Р. Средней квадратической ошибкой положения точки
5. Оценка точности положения точки Р. Средней квадратической ошибкой положения точки
2. Прямая засечка.
Для решения прямой засечки, заключающейся в определении координат третьего
2. Прямая засечка.
Для решения прямой засечки, заключающейся в определении координат третьего
а) Формулы Юнга
Даны координаты точек А, B, C. Измерены углы
а) Формулы Юнга
Даны координаты точек А, B, C. Измерены углы
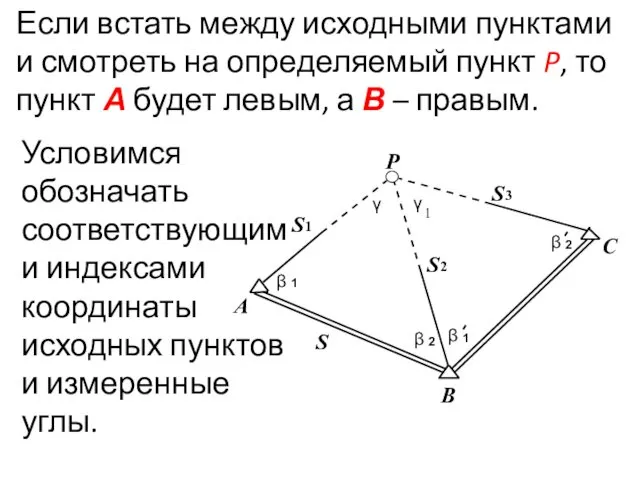
Если встать между исходными пунктами и смотреть на определяемый пункт P,
Если встать между исходными пунктами и смотреть на определяемый пункт P,
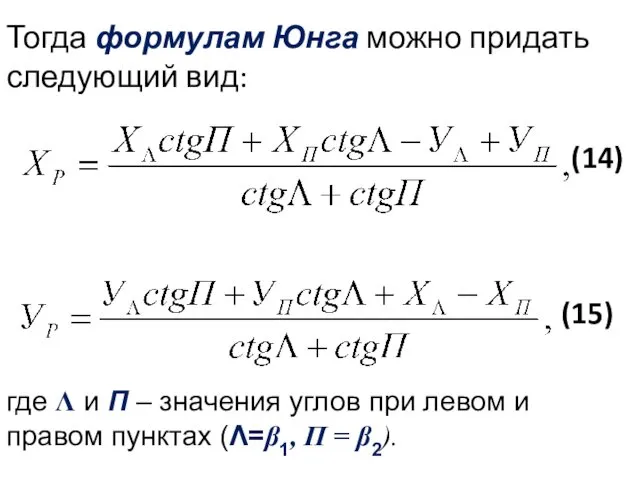
Тогда формулам Юнга можно придать следующий вид:
(14)
(15)
где Λ и П –
Тогда формулам Юнга можно придать следующий вид:
(14)
(15)
где Λ и П –
В целях контроля находят угол
γ=1800– β1 – β2,
а затем
В целях контроля находят угол
γ=1800– β1 – β2,
а затем
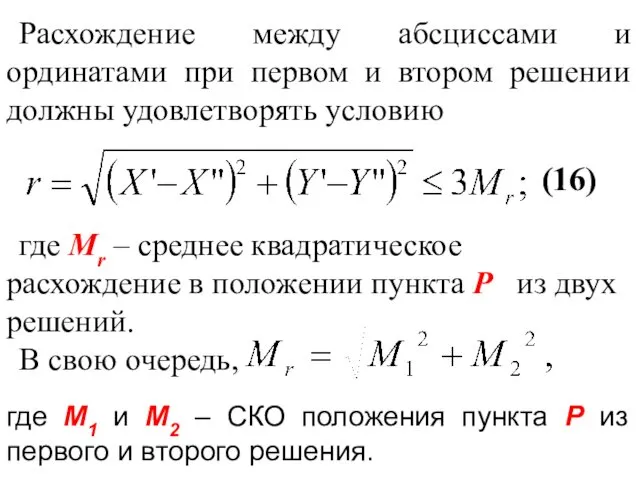
Расхождение между абсциссами и ординатами при первом и втором решении должны
Расхождение между абсциссами и ординатами при первом и втором решении должны
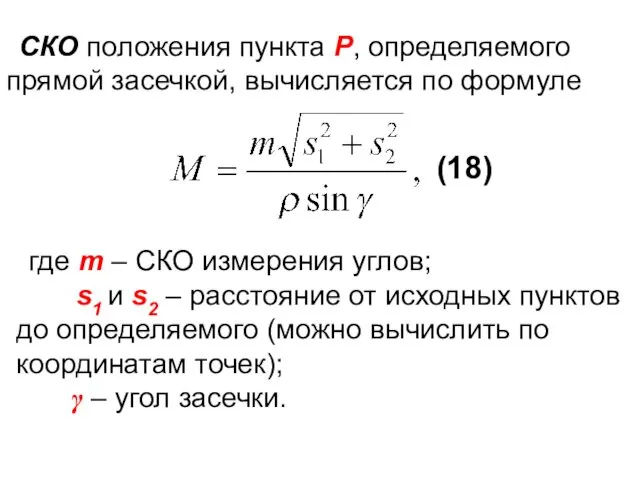
СКО положения пункта Р, определяемого прямой засечкой, вычисляется по формуле
СКО положения пункта Р, определяемого прямой засечкой, вычисляется по формуле
б) Формулы Гаусса.
При определении точки прямой засечкой может не быть
б) Формулы Гаусса.
При определении точки прямой засечкой может не быть
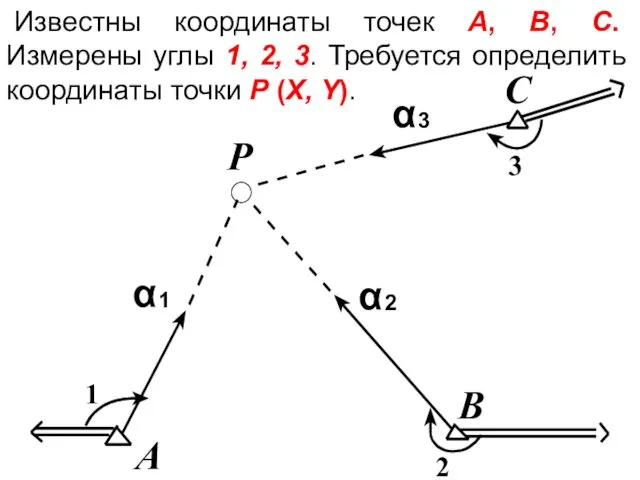
Известны координаты точек А, B, C. Измерены углы 1, 2, 3.
Известны координаты точек А, B, C. Измерены углы 1, 2, 3.
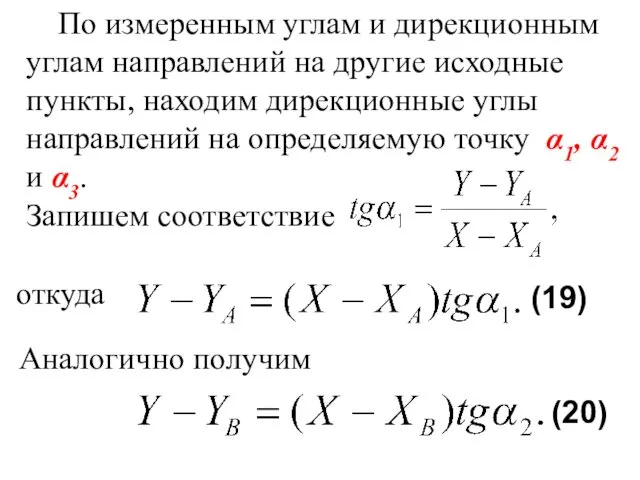
По измеренным углам и дирекционным углам направлений на другие исходные
По измеренным углам и дирекционным углам направлений на другие исходные
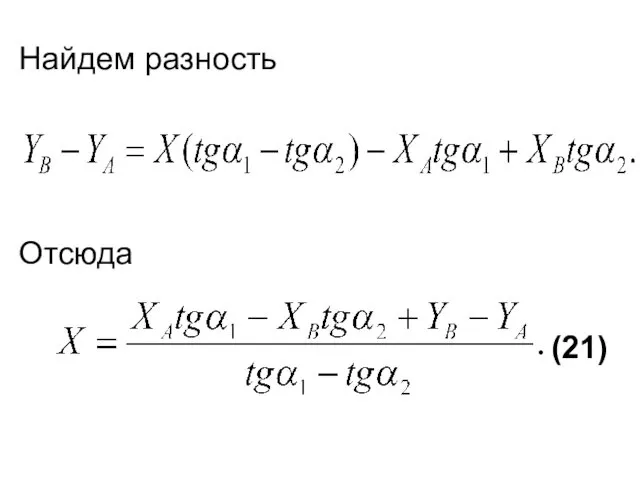
Найдем разность
Отсюда
(21)
Найдем разность
Отсюда
(21)
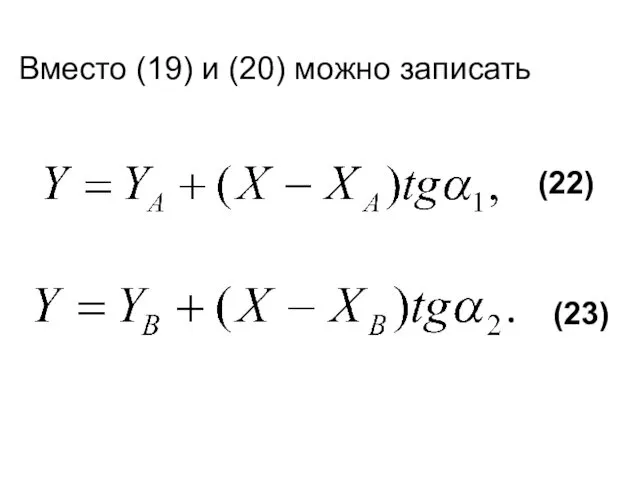
Вместо (19) и (20) можно записать
(22)
(23)
Вместо (19) и (20) можно записать
(22)
(23)
Нахождение ординат по двум формулам (22) и (23) позволяет проконтролировать вычисления.
Нахождение ординат по двум формулам (22) и (23) позволяет проконтролировать вычисления.
3. Обратная засечка
(задача Потенота)
Сущность обратной засечки заключается в определении положения
3. Обратная засечка
(задача Потенота)
Сущность обратной засечки заключается в определении положения
На основе трех исходных пунктов задача решается без контроля правильности измерения
На основе трех исходных пунктов задача решается без контроля правильности измерения
Даны координаты пунктов А, B, C. Измерены углы β1, β2. Требуется
Даны координаты пунктов А, B, C. Измерены углы β1, β2. Требуется
В начале решением обратных геодезических задач определим дирекционные углы и длины
В начале решением обратных геодезических задач определим дирекционные углы и длины
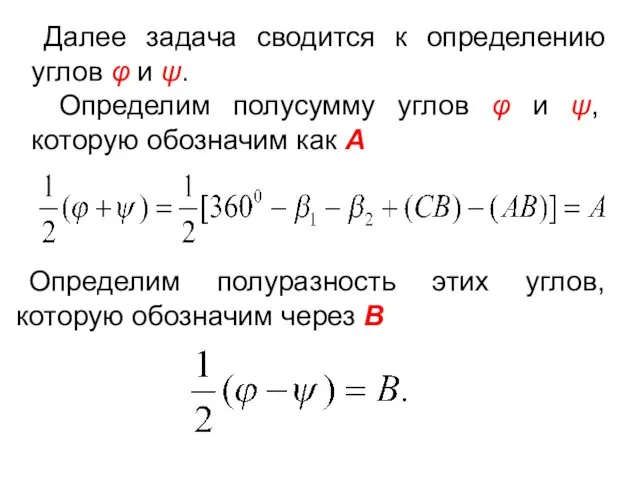
Далее задача сводится к определению углов φ и ψ.
Определим полусумму
Далее задача сводится к определению углов φ и ψ.
Определим полусумму
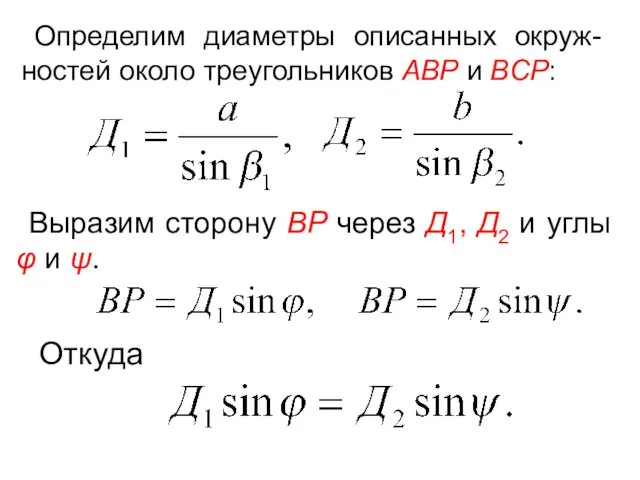
Определим диаметры описанных окруж-ностей около треугольников ABP и BCP:
Выразим сторону
Определим диаметры описанных окруж-ностей около треугольников ABP и BCP:
Выразим сторону
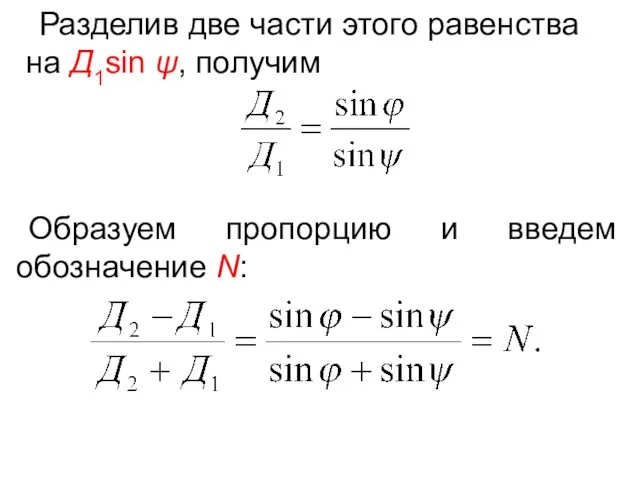
Разделив две части этого равенства на Д1sin ψ, получим
.
Образуем пропорцию
Разделив две части этого равенства на Д1sin ψ, получим
.
Образуем пропорцию
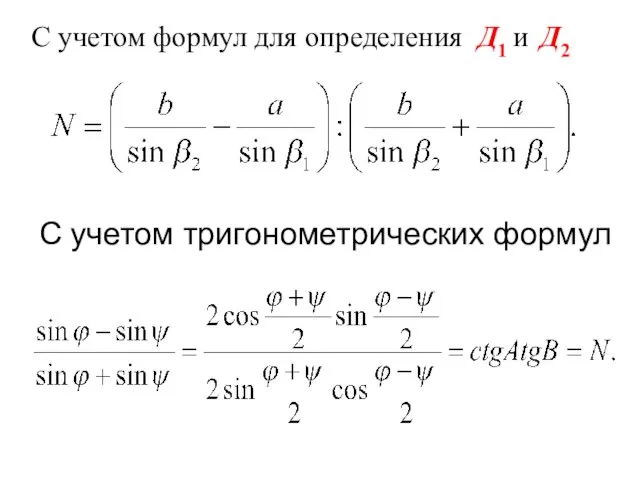
С учетом формул для определения Д1 и Д2
С учетом тригонометрических формул
С учетом формул для определения Д1 и Д2
С учетом тригонометрических формул
Отсюда
.
Вычислив значения А и В, определим углы φ и
Отсюда
.
Вычислив значения А и В, определим углы φ и
Координаты точки Р:
Для контроля координат точки Р можно
Координаты точки Р:
Для контроля координат точки Р можно
Рассмотренная обратная засечка по трем исходным пунктам называется однократной.
В таком
Рассмотренная обратная засечка по трем исходным пунктам называется однократной.
В таком
Задача решается дважды при различном сочетании исходных пунктов. Например, первый раз
Задача решается дважды при различном сочетании исходных пунктов. Например, первый раз
Отсюда допустимое расхождение в значениях вычисленных координат можно установить по формуле
Отсюда допустимое расхождение в значениях вычисленных координат можно установить по формуле
4. Линейная засечка.
Задача линейной засечки заключается в определении координат третьего
4. Линейная засечка.
Задача линейной засечки заключается в определении координат третьего
Даны координаты пунктов А, B, C. Измерены линии S1, S2, S3.
Даны координаты пунктов А, B, C. Измерены линии S1, S2, S3.
Рассмотрим однократную засечку с использованием пунктов А и В.
1. Решением обратной
Рассмотрим однократную засечку с использованием пунктов А и В.
1. Решением обратной
2. Определим угол β1, используя теорему косинусов:
3. Определим дирекционный угол
2. Определим угол β1, используя теорему косинусов:
3. Определим дирекционный угол
4. Определим координаты точки Р:
Для контроля решения задачи вычисляется длина
4. Определим координаты точки Р:
Для контроля решения задачи вычисляется длина
Расхождение не должно превышать 3-х единиц последнего знака в измеренном значении
Расхождение не должно превышать 3-х единиц последнего знака в измеренном значении
Допускается
|СР–S3| <6ms
где ms – СКО измерения расстояний S3.
Однако в целях
Допускается
|СР–S3| <6ms
где ms – СКО измерения расстояний S3.
Однако в целях
Допустимое расхождение в координатах определяют по формуле
В свою очередь
Допустимое расхождение в координатах определяют по формуле
В свою очередь
где М1 и М2 – СКО положения пункта Р, определенного линейной
где М1 и М2 – СКО положения пункта Р, определенного линейной
 Кипр как остров на средиземноморском шельфе
Кипр как остров на средиземноморском шельфе Создание лесопаркового зеленого щита вокруг города Челябинска
Создание лесопаркового зеленого щита вокруг города Челябинска Евпатория - жемчужина морская
Евпатория - жемчужина морская Природные зоны Земли
Природные зоны Земли Чувашский народ
Чувашский народ Еуразия материгін қорытындылауда ҰБТ-ға дайындау әдістері
Еуразия материгін қорытындылауда ҰБТ-ға дайындау әдістері Экскурсионный туризм на Северном Кавказе
Экскурсионный туризм на Северном Кавказе Бермудский треугольник
Бермудский треугольник Государство Ирландия
Государство Ирландия Заселение и освоение территории Вологодской области. Этапы формирования хозяйства
Заселение и освоение территории Вологодской области. Этапы формирования хозяйства Урал. Освоение и хозяйство. 2 часть. 9 класс
Урал. Освоение и хозяйство. 2 часть. 9 класс Новосибирск – крупнейший муниципалитет России
Новосибирск – крупнейший муниципалитет России Общие сведения по геодезии. Предмет геодезии
Общие сведения по геодезии. Предмет геодезии Щелочные основные лампрофиры
Щелочные основные лампрофиры Санкт-Петербург вторая столица России. Промышленность
Санкт-Петербург вторая столица России. Промышленность Антарктида “Королева холоду
Антарктида “Королева холоду Город Калининград
Город Калининград Кто хочет стать миллионером? Викторина по изучению Арктики для 8-х классов
Кто хочет стать миллионером? Викторина по изучению Арктики для 8-х классов Индия. Флаг и герб Индии
Индия. Флаг и герб Индии Восточно-Европейская (Русская) равнина
Восточно-Европейская (Русская) равнина Международная экономическая интеграция. Урок географии в 10 классе
Международная экономическая интеграция. Урок географии в 10 классе Африка материгы
Африка материгы Национальный и религиозный состав населения России
Национальный и религиозный состав населения России Волны. Виды волн
Волны. Виды волн Оңтүстік Қазақстан шипажайлары
Оңтүстік Қазақстан шипажайлары Характеристика области острова Святой Елены и Вознесения Африканского подцарства Палеотропического царства
Характеристика области острова Святой Елены и Вознесения Африканского подцарства Палеотропического царства Зиянды атмосфералық құбылыстар
Зиянды атмосфералық құбылыстар Водоёмы моего родного края. Бутурлино́ — посёлок городского типа в Нижегородской области
Водоёмы моего родного края. Бутурлино́ — посёлок городского типа в Нижегородской области