- Маневренный планшет. Начальные построения и оценка ситуации

Содержание
- 2. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
- 3. Нанесение эхо сигналов судов
- 4. Построение треугольника скоростей
- 5. на практике измерения пеленга и дистанции производятся с некоторой погрешностью, зависящей как от технических характеристик РЛС,
- 6. Краткий вывод по теме. Пошаговые действия для оценки ситуации: наносится вектор скорости нашего судна делаются замеры
- 7. РАСЧЕТ МАНЕВРА РАСХОЖДЕНИЯ
- 8. Точка упреждения через 3 мин.
- 9. Расхождение в 3-х мильной зоне
- 10. Расхождение в 3 милях
- 11. Изменение маневра курсом и скоростью
- 12. Краткий вывод по теме.
- 13. РАСХОЖДЕНИЕ С НЕСКОЛЬКИМИ СУДАМИ
- 15. Скачать презентацию
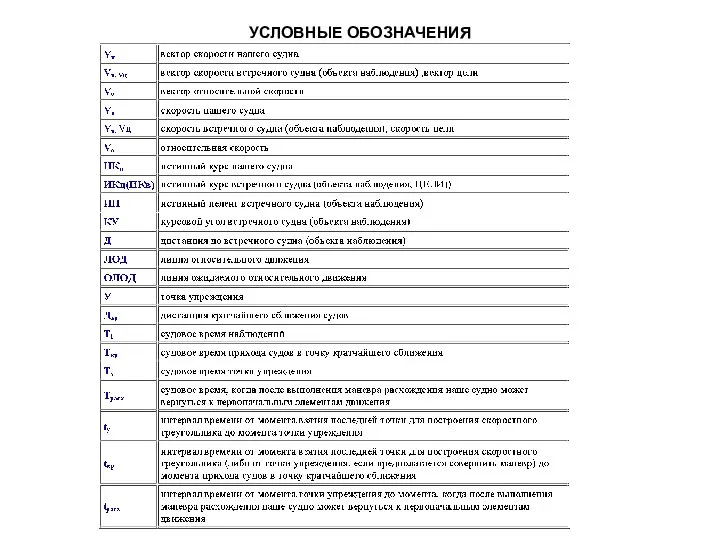
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
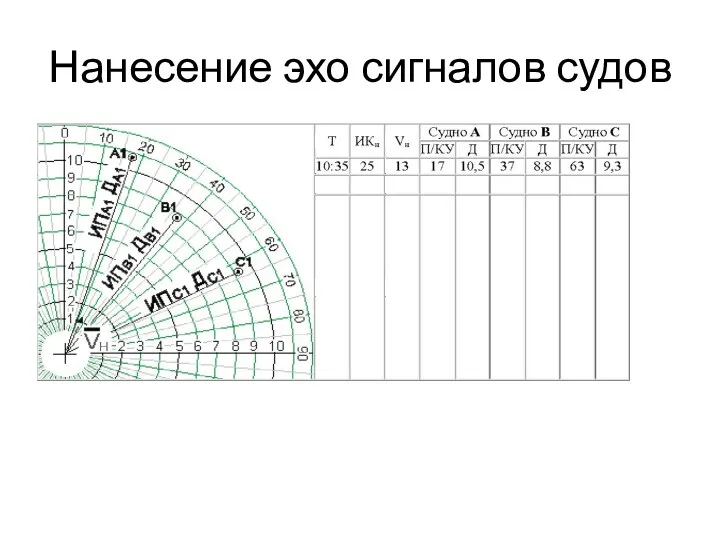
Нанесение эхо сигналов судов
Нанесение эхо сигналов судов

Построение треугольника скоростей
Построение треугольника скоростей
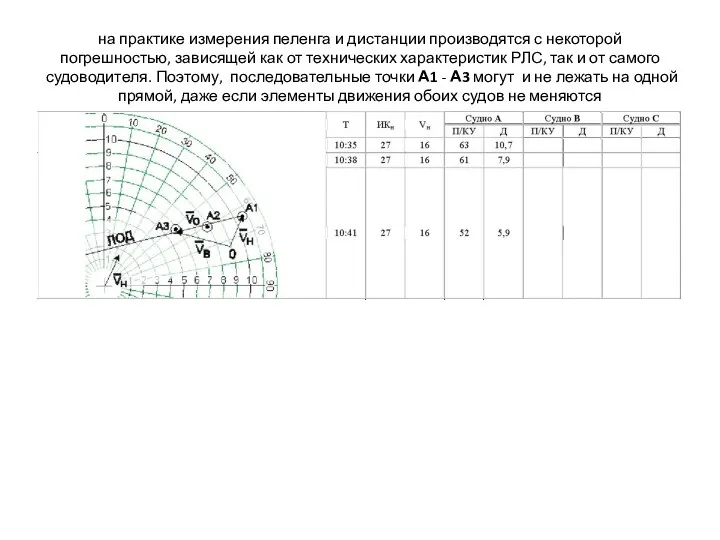
на практике измерения пеленга и дистанции производятся с некоторой погрешностью, зависящей
на практике измерения пеленга и дистанции производятся с некоторой погрешностью, зависящей
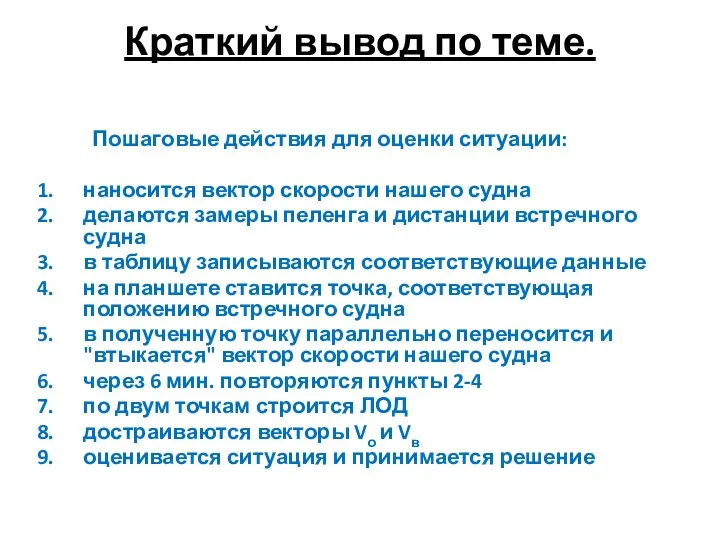
Краткий вывод по теме.
Пошаговые действия для оценки ситуации:
наносится вектор скорости
Краткий вывод по теме.
Пошаговые действия для оценки ситуации:
наносится вектор скорости
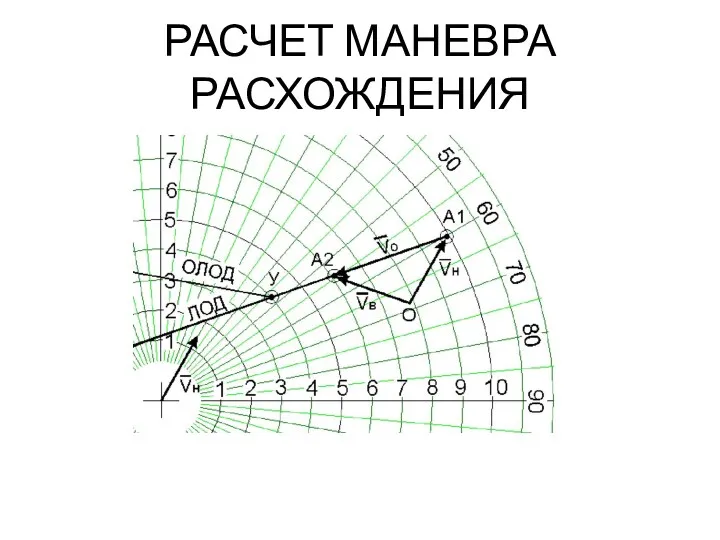
РАСЧЕТ МАНЕВРА РАСХОЖДЕНИЯ
РАСЧЕТ МАНЕВРА РАСХОЖДЕНИЯ
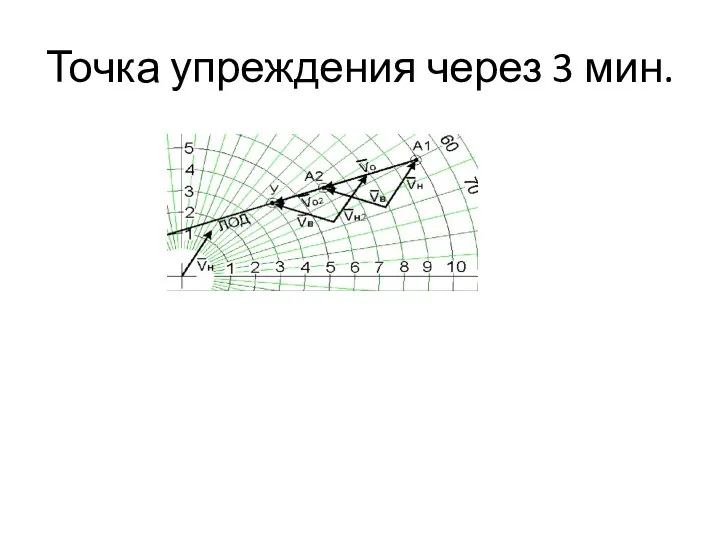
Точка упреждения через 3 мин.
Точка упреждения через 3 мин.

Расхождение в 3-х мильной зоне
Расхождение в 3-х мильной зоне
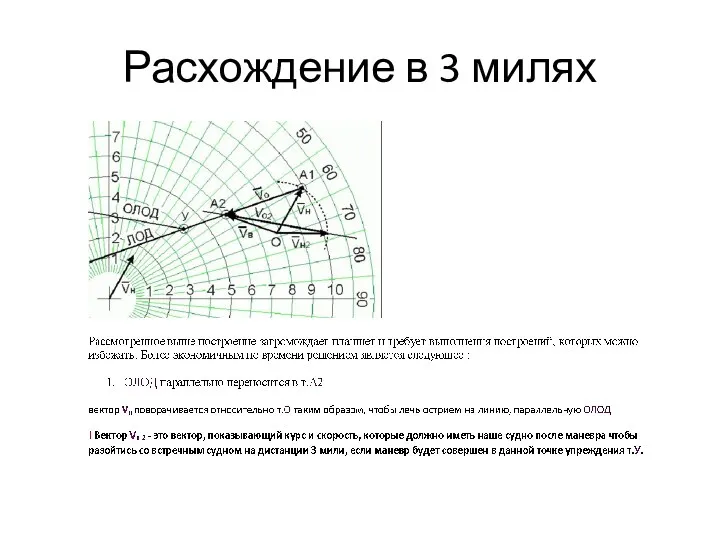
Расхождение в 3 милях
Расхождение в 3 милях

Изменение маневра курсом и скоростью
Изменение маневра курсом и скоростью
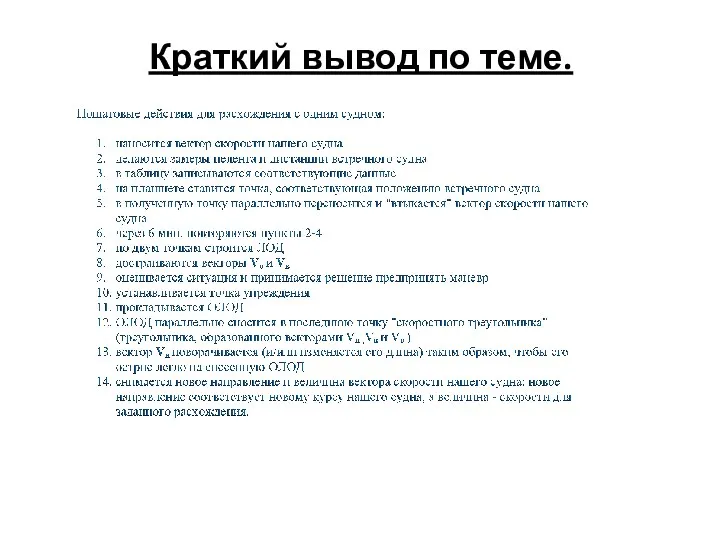
Краткий вывод по теме.
Краткий вывод по теме.
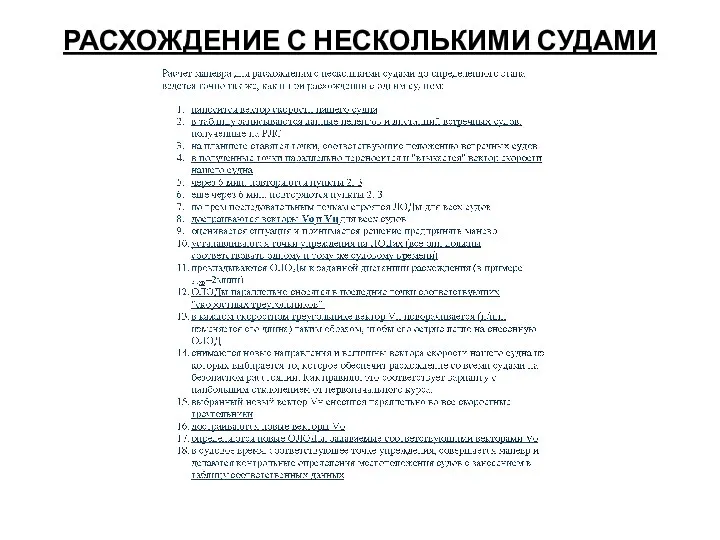
РАСХОЖДЕНИЕ С НЕСКОЛЬКИМИ СУДАМИ
РАСХОЖДЕНИЕ С НЕСКОЛЬКИМИ СУДАМИ
 Лекция Выветривание. Условия и факторы почвообразования
Лекция Выветривание. Условия и факторы почвообразования Сучасний етап розвитку картографії
Сучасний етап розвитку картографії Морские экосистемы
Морские экосистемы National parks Ukraine
National parks Ukraine Европа: общая характеристика
Европа: общая характеристика Мой край - моя гордость (волости Невельского района)
Мой край - моя гордость (волости Невельского района) Город Вятские Поляны
Город Вятские Поляны Қазақстан Республикасы— Шығыс Еуропа мен Орталық Азияда орналасқан мемлекет
Қазақстан Республикасы— Шығыс Еуропа мен Орталық Азияда орналасқан мемлекет Гид путешественника по городу Ярославль
Гид путешественника по городу Ярославль Река Обь
Река Обь Гидрологические памятники Крыма
Гидрологические памятники Крыма Географія як система наук
Географія як система наук Загадочная Антарктида
Загадочная Антарктида Физико - географическое положение Северной Америки
Физико - географическое положение Северной Америки Распределение осадков на земле. Пояса атмосферного давления
Распределение осадков на земле. Пояса атмосферного давления Озёра России
Озёра России Australia
Australia Страны мира. Италия
Страны мира. Италия Окружающий мир. 3 класс. Полезные ископаемые
Окружающий мир. 3 класс. Полезные ископаемые Геодезическое обеспечение строительства
Геодезическое обеспечение строительства Изображение земной поверхности
Изображение земной поверхности Природная зона тундра
Природная зона тундра Северный полюс, Арктика, Антарктида и их жители
Северный полюс, Арктика, Антарктида и их жители Динамика численности населения мира. (Лекция 1)
Динамика численности населения мира. (Лекция 1) Северо-Западный федеральный округ. Санкт-Петербург
Северо-Западный федеральный округ. Санкт-Петербург Завод Lysi - один из самых современных в мире. Исландия
Завод Lysi - один из самых современных в мире. Исландия Остров Кипр
Остров Кипр