- Пространственные и временные системы координат

Содержание
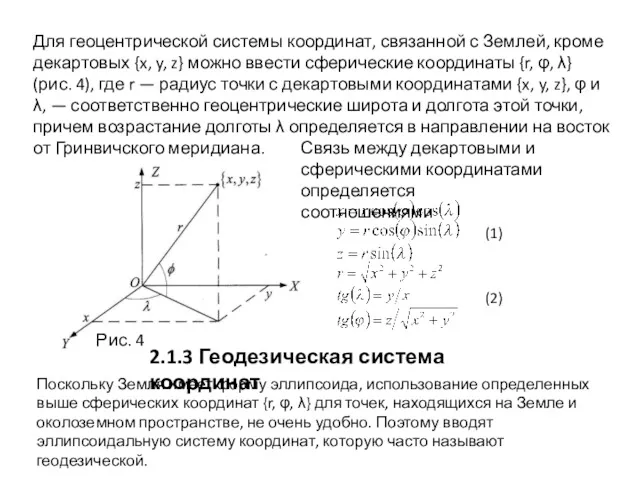
- 2. 2.1.2 Геоцентрическая система координат, связанная с Землей Центр этой СК совмещен с центром масс Земли, ось
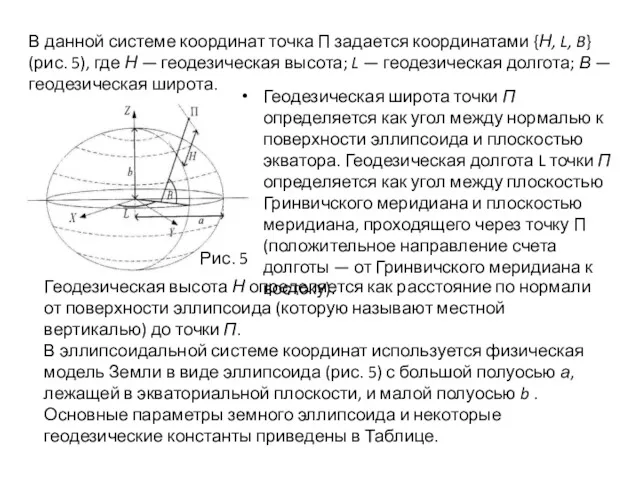
- 3. Для геоцентрической системы координат, связанной с Землей, кроме декартовых {x, y, z} можно ввести сферические координаты
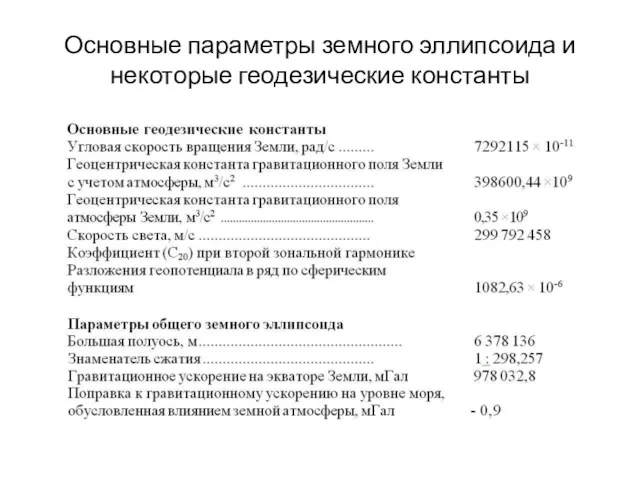
- 4. В данной системе координат точка П задается координатами {Н, L, B} (рис. 5), где Н —
- 5. Основные параметры земного эллипсоида и некоторые геодезические константы
- 6. 2.1.4 Локальная декартова система координат Декартову систему координат можно задавать в любой точке Р Земли или
- 7. 2.1.5 Декартова система координат, связанная с подвижным объектом При решении задач навигации летательных аппаратов (ЛА) часто
- 8. 2.1.6 Преобразование декартовых систем координат Пусть имеем две декартовы правосторонние системы координат OX1Y1Z1 и OX2Y2Z2, начала
- 9. на угол α2 относительно оси OY1, на угол α3 относительно оси OZ1 и которую иногда называют
- 10. Поэтому можно записать =U3(a3)U2(a2)U1(a1), (6) где (7) Для правосторонних систем координат углы вращения положительны, если они
- 12. Скачать презентацию
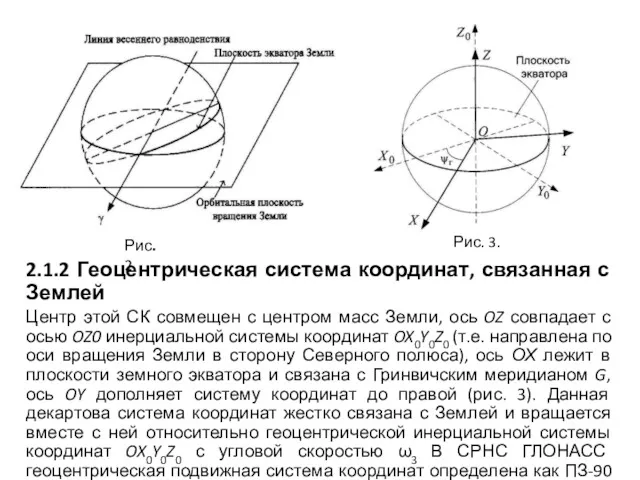
2.1.2 Геоцентрическая система координат, связанная с Землей
Центр этой СК совмещен с
2.1.2 Геоцентрическая система координат, связанная с Землей
Центр этой СК совмещен с
Для геоцентрической системы координат, связанной с Землей, кроме декартовых {x, y, z} можно
Для геоцентрической системы координат, связанной с Землей, кроме декартовых {x, y, z} можно
В данной системе координат точка П задается координатами {Н, L, B}
В данной системе координат точка П задается координатами {Н, L, B}
Основные параметры земного эллипсоида и некоторые геодезические константы
Основные параметры земного эллипсоида и некоторые геодезические константы
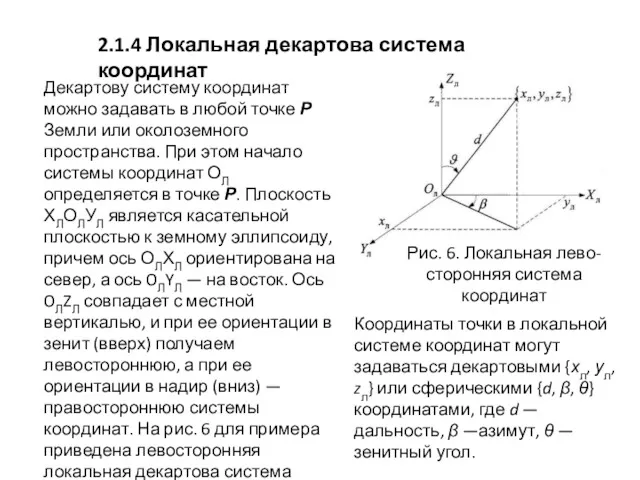
2.1.4 Локальная декартова система координат
Декартову систему координат можно задавать в любой
2.1.4 Локальная декартова система координат
Декартову систему координат можно задавать в любой
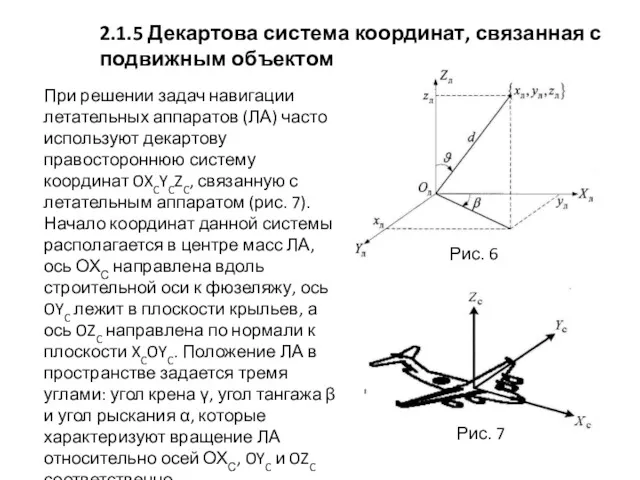
2.1.5 Декартова система координат, связанная с подвижным объектом
При решении задач навигации
2.1.5 Декартова система координат, связанная с подвижным объектом
При решении задач навигации
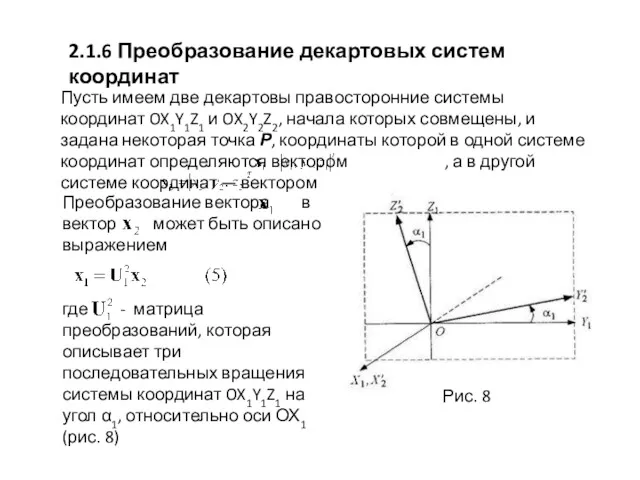
2.1.6 Преобразование декартовых систем координат
Пусть имеем две декартовы правосторонние системы координат
2.1.6 Преобразование декартовых систем координат
Пусть имеем две декартовы правосторонние системы координат
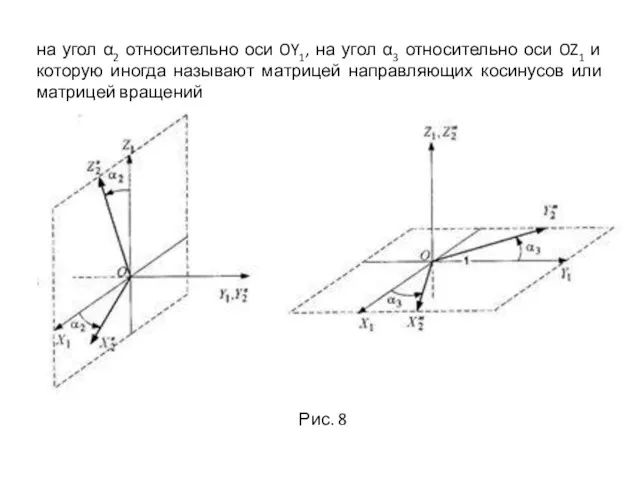
на угол α2 относительно оси OY1, на угол α3 относительно оси
на угол α2 относительно оси OY1, на угол α3 относительно оси
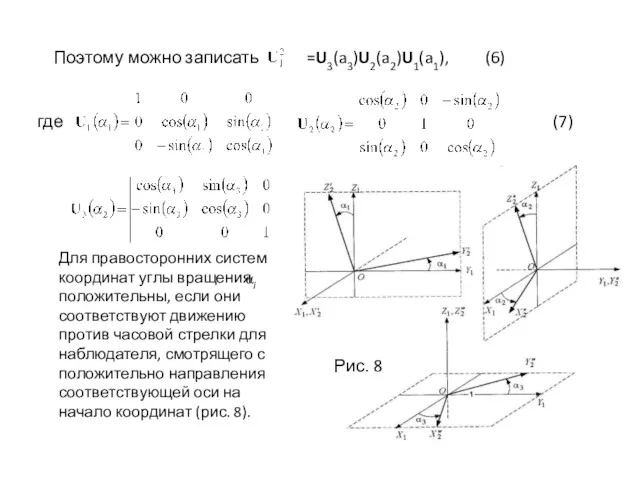
Поэтому можно записать =U3(a3)U2(a2)U1(a1), (6)
где (7)
Для правосторонних систем координат углы вращения
Поэтому можно записать =U3(a3)U2(a2)U1(a1), (6)
где (7)
Для правосторонних систем координат углы вращения
 Жоспар және оның түрлері
Жоспар және оның түрлері Анализ текста о природных особенностях Земли
Анализ текста о природных особенностях Земли Мировой океан и его части
Мировой океан и его части Природный парк Донской Волгоградской области
Природный парк Донской Волгоградской области Современная политическая карта мира
Современная политическая карта мира Королевство Швеция
Королевство Швеция ерриториальные претензии в Антарктике
ерриториальные претензии в Антарктике Население ХМАО
Население ХМАО Алтайский заповедник
Алтайский заповедник Физико-географическое положение Австралии. История открытия и исследования материка
Физико-географическое положение Австралии. История открытия и исследования материка Швеция
Швеция II этап республиканской олимпиады по учебному предмету География
II этап республиканской олимпиады по учебному предмету География France
France Организация культурно-познавательных поездок. Лучший педагог – организатор школьных поездок
Организация культурно-познавательных поездок. Лучший педагог – организатор школьных поездок Климат Евразии. Тест
Климат Евразии. Тест Герб, флаг Республики Крым
Герб, флаг Республики Крым Село Сюмси в Удмурдии
Село Сюмси в Удмурдии Водные ресурсы. Водные ресурсы и их использование человеком. (10 класс)
Водные ресурсы. Водные ресурсы и их использование человеком. (10 класс) Национальные парки мира
Национальные парки мира Северный полюс, Арктика, Антарктида и их жители
Северный полюс, Арктика, Антарктида и их жители Димитровград. Мой город - самый лучший на планете
Димитровград. Мой город - самый лучший на планете Внесение изменений в генеральный план города Нижнего Новгорода
Внесение изменений в генеральный план города Нижнего Новгорода Развитие форм рельефа
Развитие форм рельефа Экономика Испании
Экономика Испании Қазақстан
Қазақстан Условные знаки. Масштаб
Условные знаки. Масштаб Восточная и Северо-Восточная Сибирь
Восточная и Северо-Восточная Сибирь История исследования Красноярского края
История исследования Красноярского края