- Розмічувальні інженерно-геодезичні мережі

Содержание
- 2. Приклади зовнішньої та внутрішньої мереж
- 3. Особливості інженерно-геодезичних мереж: часто створюються в місцевій системі координат із прив'язкою до державної системи координат; форма
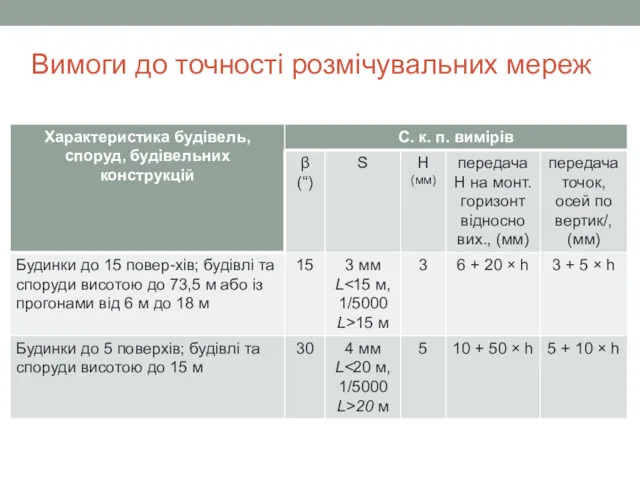
- 4. Вимоги до точності розмічувальних мереж
- 5. Вимоги до точності розмічувальних мереж
- 6. Вимоги до точності розмічувальних мереж
- 7. 4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція (Гідротехнічна тріангуляція)
- 8. 4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція (Мостова тріангуляція)
- 9. 4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція (Тунельна тріангуляція)
- 10. 4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція (Ланцюг трикутників)
- 11. 4.2 Методи створення інженерно-геодезичних мереж. Лінійно-кутові мережі (Бездіагональний чотирикутник)
- 12. де S – довжина виміряної бічної сторони, ma – с.к.п. виміру першої сторони. Середні квадратичні помилки
- 13. Ваги виміряних кутів та довжин сторін приймемо: В трикутнику виникають три умовні рівняння:
- 14. Значення коефіцієнтів вагової функції
- 15. На основі даних таблиці можемо знайти величину оберненої ваги: Та значення с.к.п. кута А: За даними
- 16. 4.2 Методи створення інженерно-геодезичних мереж. Трилатерація
- 17. Так, для системи трикутників рис. з чотирма виміяними сторонами a1, а2, b1 b2 і діагоналями d1і
- 18. 4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
- 19. 4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія а) Ламаний хід; b) Витягнутий хід.
- 20. 4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія Замкнутий хід
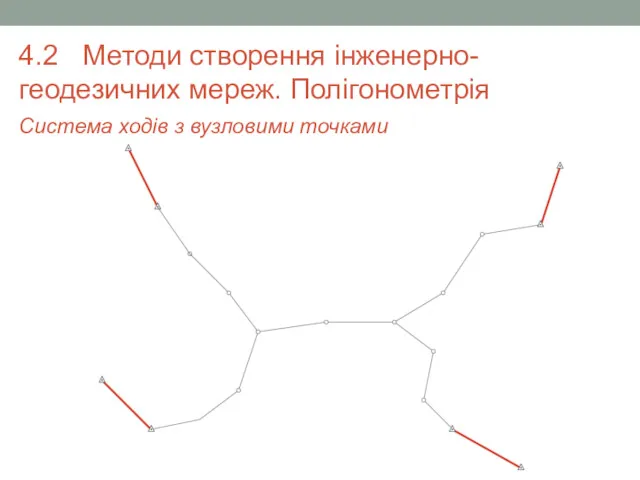
- 21. 4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія Система ходів з вузловими точками
- 22. С.к.п. кінцевої точки витягнутого ходу: де n – к-сть сторін, L – довжина ходу. Для вигнутого
- 23. Розрахунок точності кутових та лінійних вимірювань базується на значенні с. к. п. ходів: де ТС –
- 24. Коли для лінійних вимірювань використовуються світловіддалеміри, систематичними похибками яких можна знехтувати, тоді: Залежність с.к.п виміру ліній
- 25. MZ1, хід Z1 від точки A; MZ2, хід Z2 від точки D; MZ3, хід Z3 від
- 26. Далі знаходять ваги цих ходів: Після цього шукають середню квадратичну помилку положення вузлової точки в нашому
- 27. В ІІ наближенні ваги ходів: Для ІІ вузлової точки будемо мати: Далі знаходять: де: і де:
- 28. Проектування; Винесення вихідного напрямку будівельної сітки та пунктів; Визначення координат пунктів будівельної сітки; Редукування пунктів будівельної
- 29. 4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка Проект будівельної сітки
- 30. О (0,0) Y (200,100) (300,400) αO-X=0°0’00’’ X 4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка Система координат
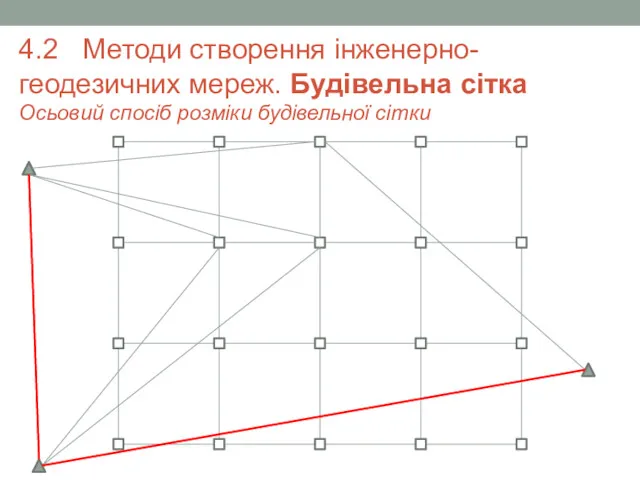
- 31. 4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка Осьовий спосіб розміки будівельної сітки
- 32. - GPS; - полігонометрія 1р.; - полігонометрія 2р.; 4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка Визначення
- 33. 1 (XП, YП) 2’ (XФ, YФ) 2 (XП, YП) α2-1 α2’-2 S2’-2 4.2 Методи створення інженерно-геодезичних
- 34. Критерієм точності розмічувальних робіт граничне відхилення будівельної конструкції від її проектного положення, воно дорівнює потрійній середній
- 35. С.к.п. геодезичних робітв свою чергу буде складатися з: де mП – с.к.п. положення пункту б.с. відносно
- 36. 4.2 Методи створення інженерно-геодезичних мереж. ГНСС
- 37. статичний режим; прискорений статичний режим; режим вимірів "стою-йду"; кінематичний режим вимірів; кінематичний режим вимірів в реальному
- 38. 4.2 Методи створення інженерно-геодезичних мереж. ГНСС Статичний режим
- 39. 4.2 Методи створення інженерно-геодезичних мереж. ГНСС Режим стою-йду
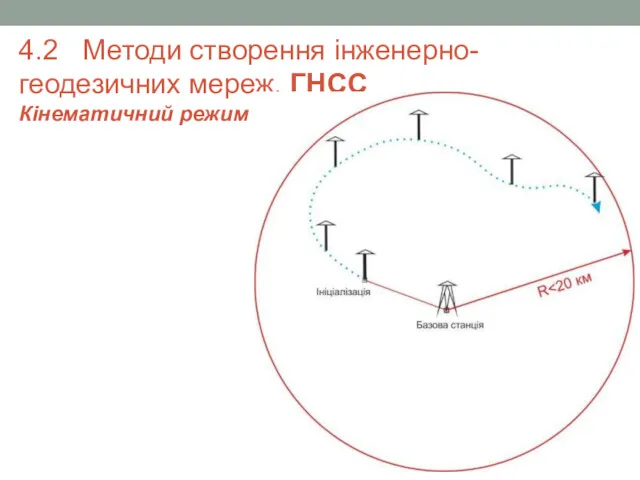
- 40. 4.2 Методи створення інженерно-геодезичних мереж. ГНСС Кінематичний режим вимірівҐ
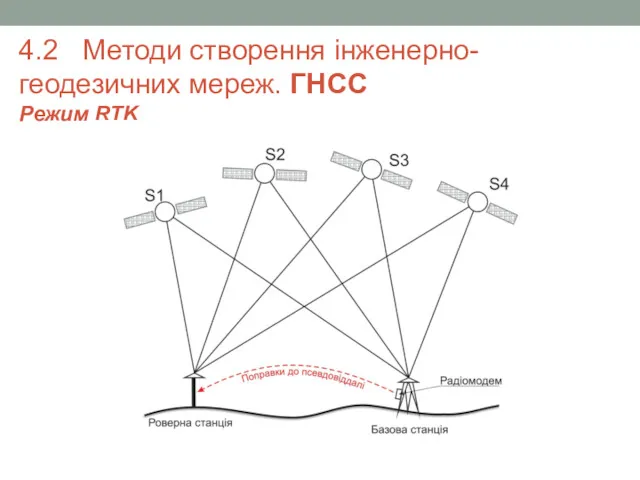
- 41. 4.2 Методи створення інженерно-геодезичних мереж. ГНСС Режим RTK
- 42. 4.2 Методи створення інженерно-геодезичних мереж. ГНСС Мережі базових станцій
- 43. Топографічне знімання Територія знімання
- 44. Винесення точки в натуру β S A B C
- 45. Радіальний спосіб
- 46. Мережевий спосіб
- 47. Мінімальна кількість сеансів спостережень N для мережі з кількістю пунктів S при використанні R приймачів при
- 48. Тривалість синхронних GPS спостережень окремих векторів для досягнення максимальної точності
- 49. Діаграма розрахунку точності визначення довжин векторів (мм) від тривалості спостережень двохчастотними приймачами на векторах довжиною до
- 50. Діаграма розрахунку точності визначення перевищень (мм) від тривалості спостережень двохчастотними приймачами на векторах довжиною до 10
- 51. Інтервали реєстрації навігаційних сигналів
- 52. 4.3 Зовнішня розмічувальна мережа будинку
- 53. Катафоти
- 54. 4.3 Зовнішня розмічувальна мережа будинку (Мережа із знаків закріплення основних осей будинку)
- 55. 4.4 Внутрішня розмічувальна мережа
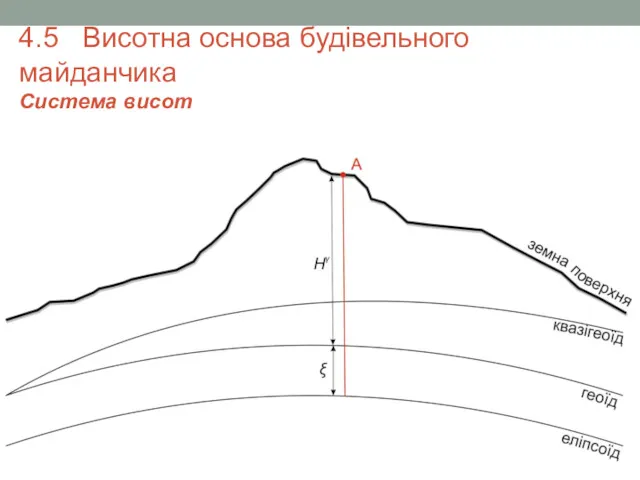
- 56. 4.5 Висотна основа будівельного майданчика
- 57. 4.5 Висотна основа будівельного майданчика Система висот
- 58. Спостереження шкал рейок виконують через бісектор сітки ниток на не парній станції у наступній послідовності: -
- 59. Спостереження шкал рейок виконують через бісектор сітки ниток на не парній станції у наступній послідовності: -
- 61. Скачать презентацию
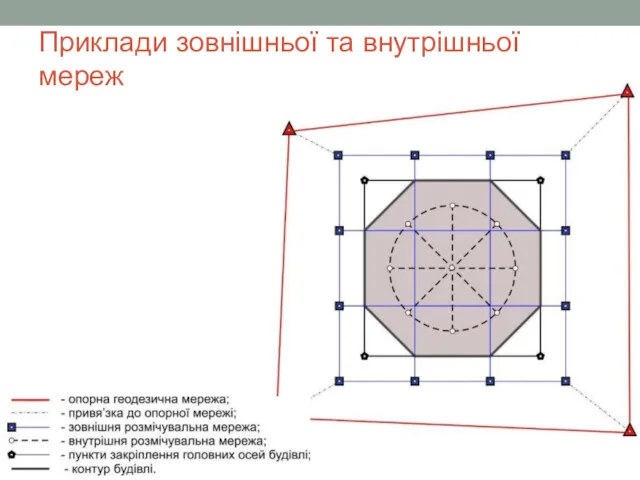
Приклади зовнішньої та внутрішньої мереж
Приклади зовнішньої та внутрішньої мереж
Особливості інженерно-геодезичних мереж:
часто створюються в місцевій системі координат із прив'язкою до
Особливості інженерно-геодезичних мереж:
часто створюються в місцевій системі координат із прив'язкою до
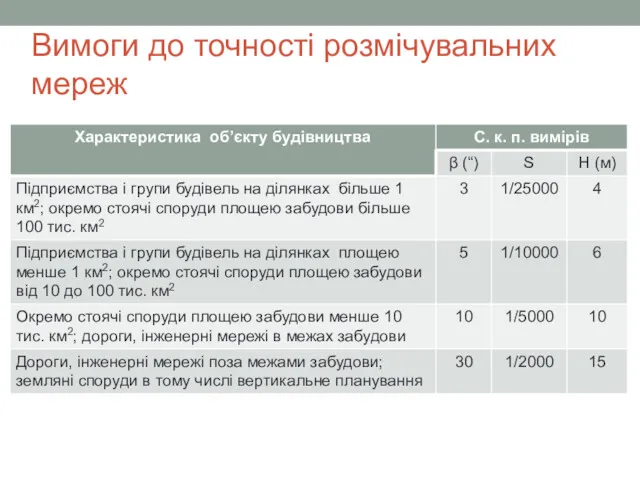
Вимоги до точності розмічувальних мереж
Вимоги до точності розмічувальних мереж
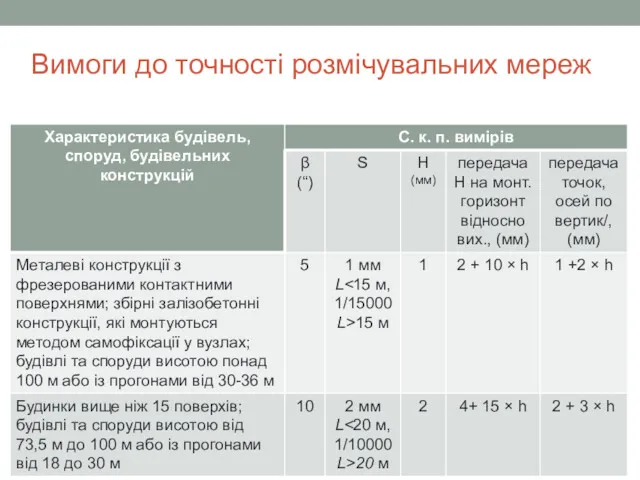
Вимоги до точності розмічувальних мереж
Вимоги до точності розмічувальних мереж
Вимоги до точності розмічувальних мереж
Вимоги до точності розмічувальних мереж

4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Гідротехнічна тріангуляція)
4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Гідротехнічна тріангуляція)
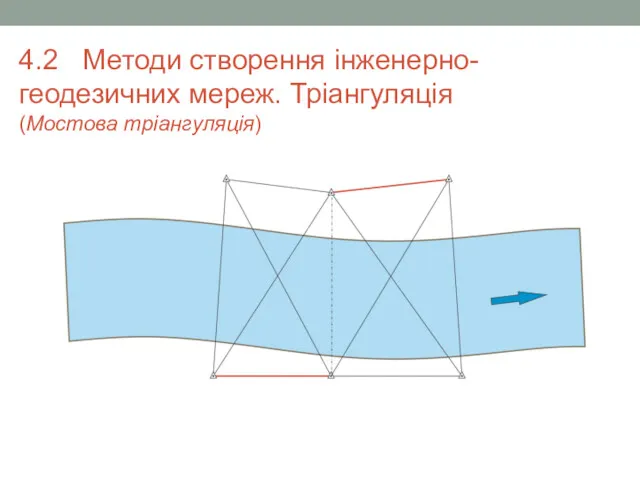
4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Мостова тріангуляція)
4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Мостова тріангуляція)

4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Тунельна тріангуляція)
4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Тунельна тріангуляція)
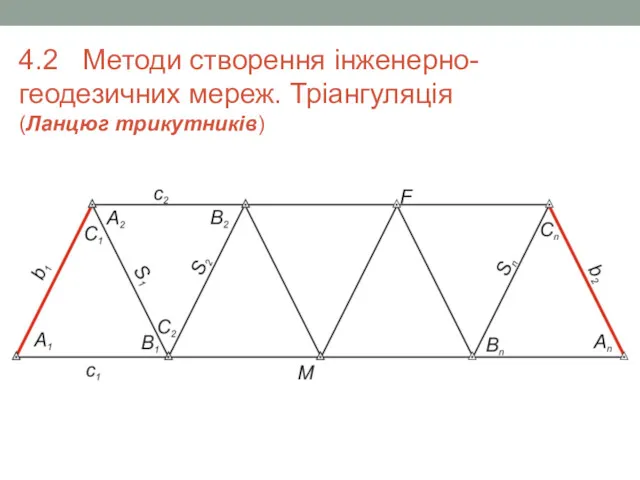
4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Ланцюг трикутників)
4.2 Методи створення інженерно-геодезичних мереж. Тріангуляція
(Ланцюг трикутників)
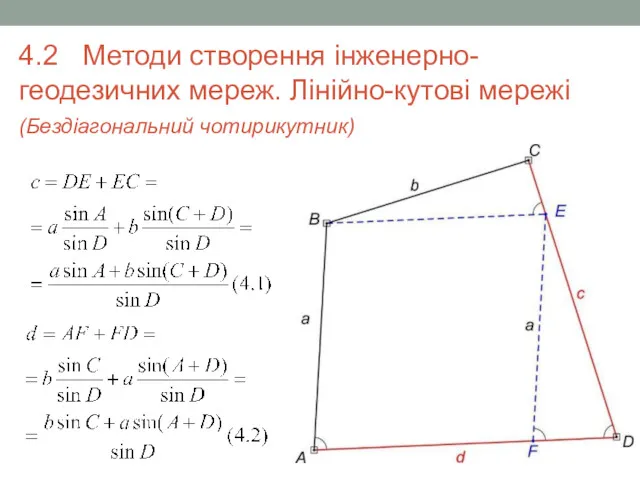
4.2 Методи створення інженерно-геодезичних мереж. Лінійно-кутові мережі
(Бездіагональний чотирикутник)
4.2 Методи створення інженерно-геодезичних мереж. Лінійно-кутові мережі
(Бездіагональний чотирикутник)
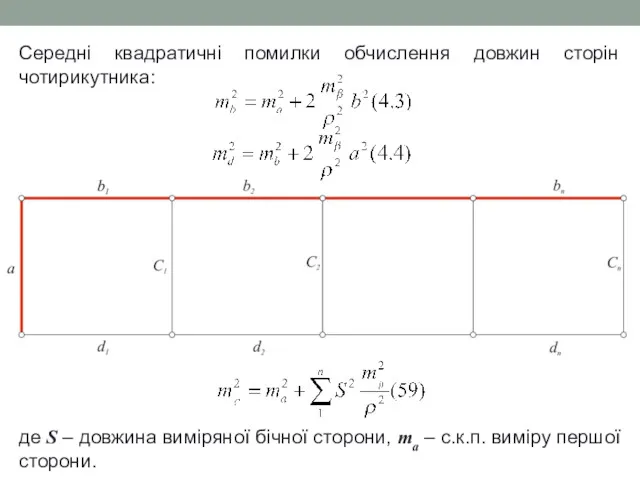
де S – довжина виміряної бічної сторони, ma – с.к.п. виміру
де S – довжина виміряної бічної сторони, ma – с.к.п. виміру
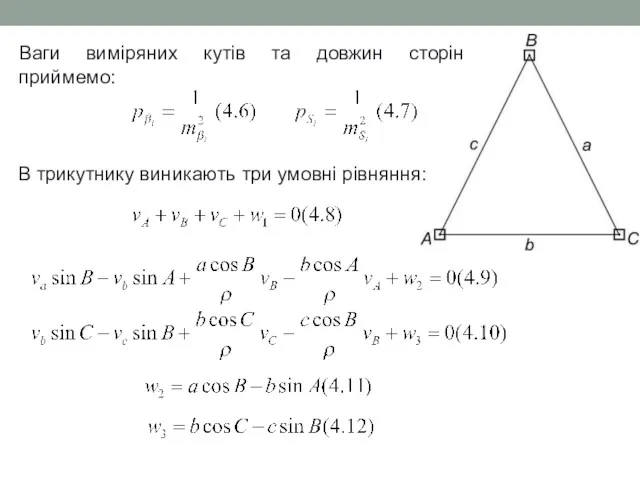
Ваги виміряних кутів та довжин сторін приймемо:
В трикутнику виникають три
Ваги виміряних кутів та довжин сторін приймемо:
В трикутнику виникають три

Значення коефіцієнтів вагової функції
Значення коефіцієнтів вагової функції
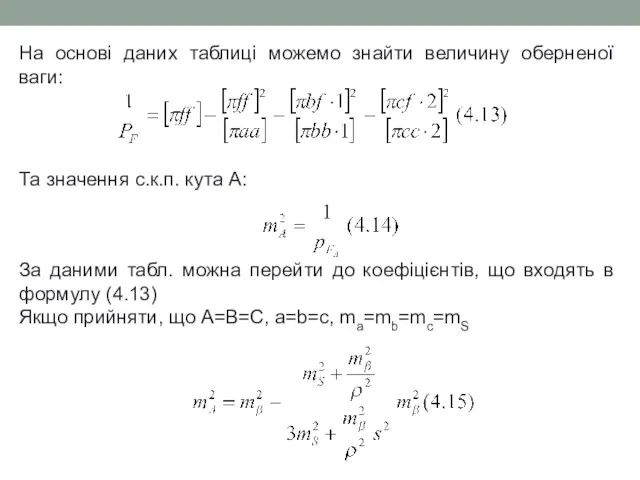
На основі даних таблиці можемо знайти величину оберненої ваги:
Та значення
На основі даних таблиці можемо знайти величину оберненої ваги:
Та значення
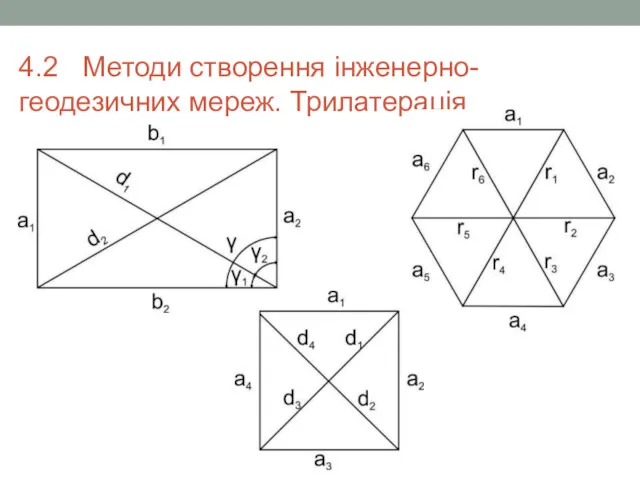
4.2 Методи створення інженерно-геодезичних мереж. Трилатерація
4.2 Методи створення інженерно-геодезичних мереж. Трилатерація
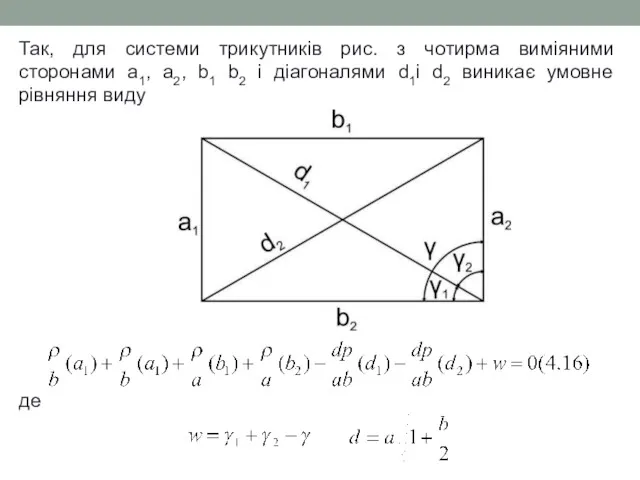
Так, для системи трикутників рис. з чотирма виміяними сторонами a1, а2,
Так, для системи трикутників рис. з чотирма виміяними сторонами a1, а2,
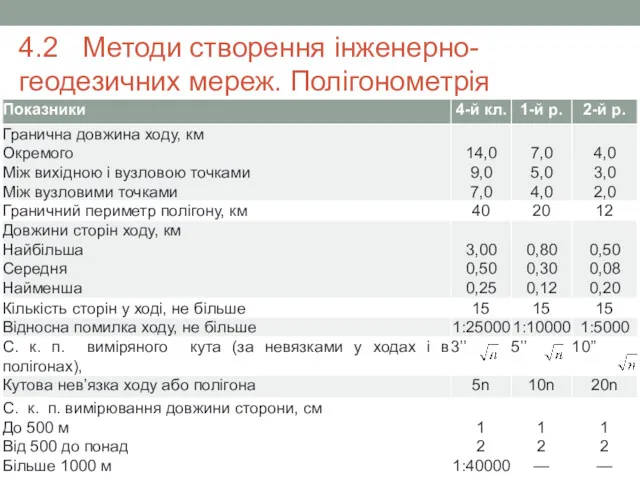
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
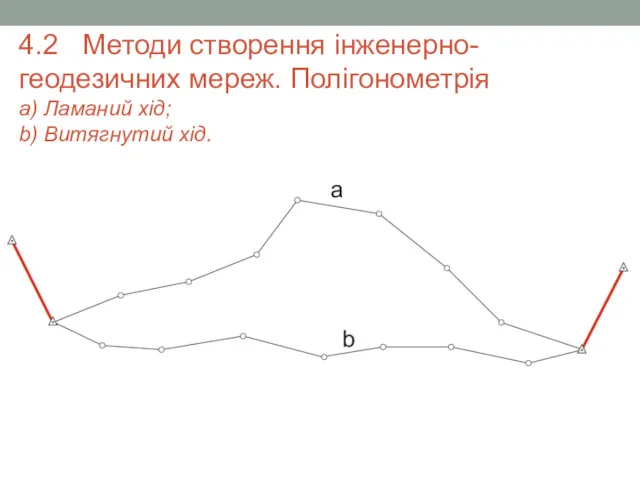
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
а) Ламаний хід;
b) Витягнутий хід.
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
а) Ламаний хід;
b) Витягнутий хід.
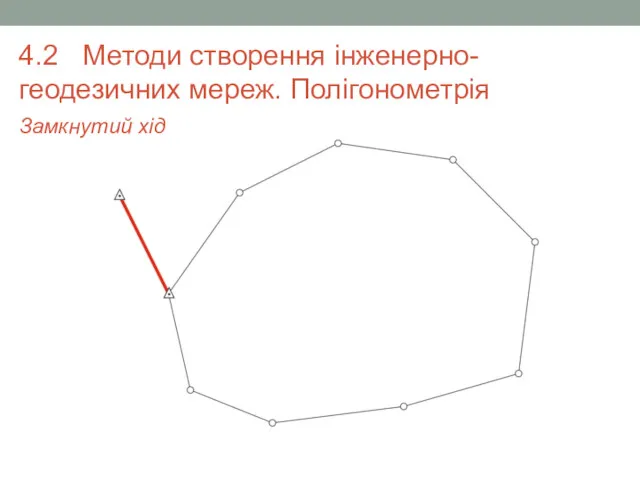
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
Замкнутий хід
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
Замкнутий хід
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
Система ходів з вузловими точками
4.2 Методи створення інженерно-геодезичних мереж. Полігонометрія
Система ходів з вузловими точками
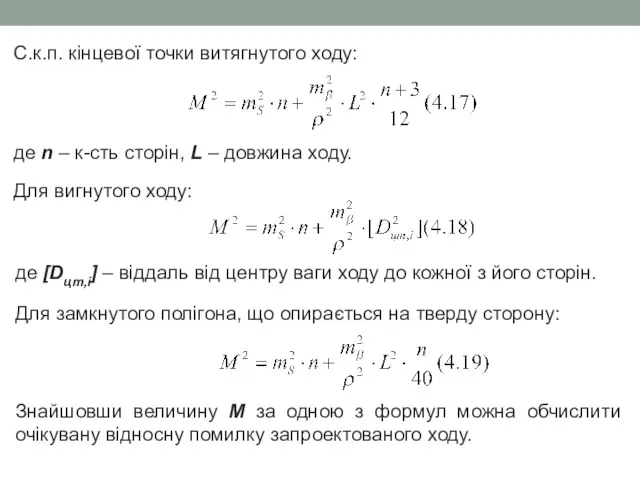
С.к.п. кінцевої точки витягнутого ходу:
де n – к-сть сторін, L –
С.к.п. кінцевої точки витягнутого ходу:
де n – к-сть сторін, L –
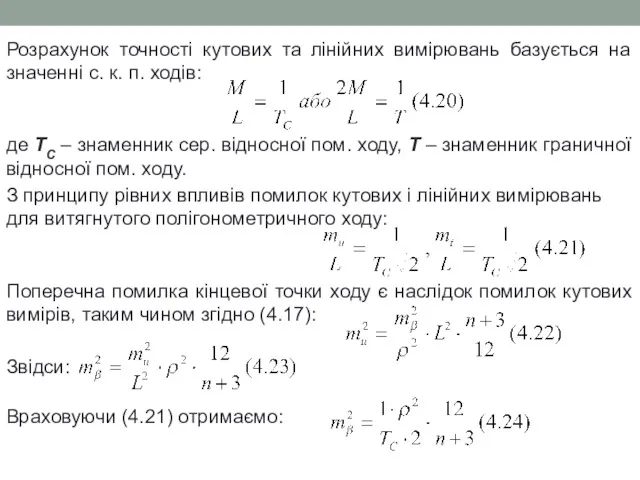
Розрахунок точності кутових та лінійних вимірювань базується на значенні с. к.
Розрахунок точності кутових та лінійних вимірювань базується на значенні с. к.
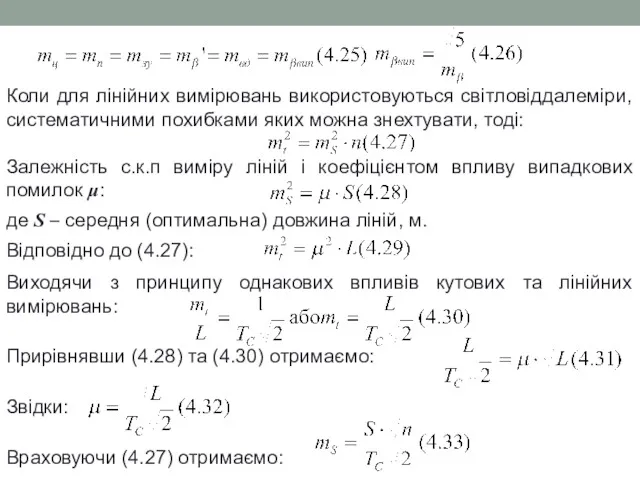
Коли для лінійних вимірювань використовуються світловіддалеміри, систематичними похибками яких можна знехтувати,
Коли для лінійних вимірювань використовуються світловіддалеміри, систематичними похибками яких можна знехтувати,
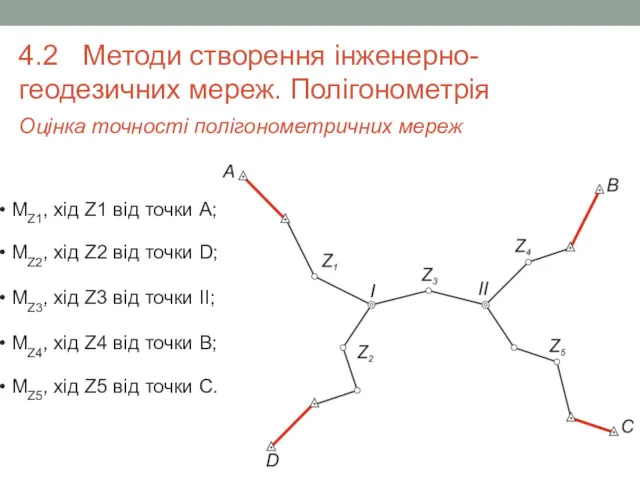
MZ1, хід Z1 від точки A;
MZ2, хід Z2 від
MZ1, хід Z1 від точки A;
MZ2, хід Z2 від
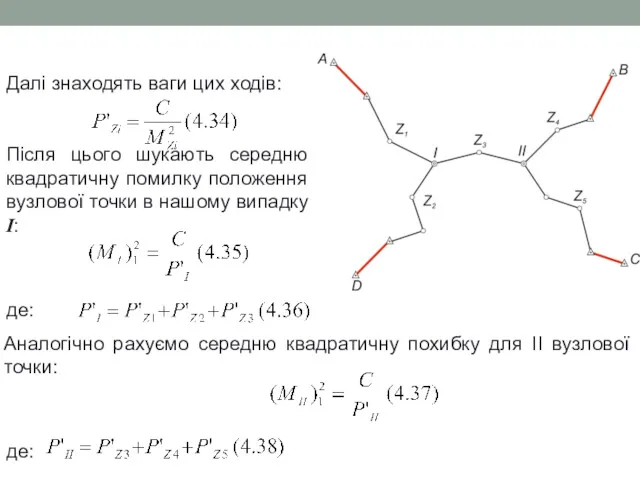
Далі знаходять ваги цих ходів:
Після цього шукають середню квадратичну помилку положення
Далі знаходять ваги цих ходів:
Після цього шукають середню квадратичну помилку положення
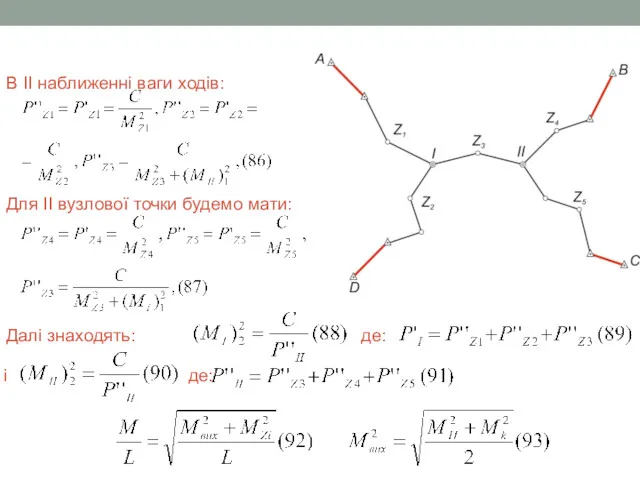
В ІІ наближенні ваги ходів:
Для ІІ вузлової точки будемо мати:
Далі знаходять:
де:
В ІІ наближенні ваги ходів:
Для ІІ вузлової точки будемо мати:
Далі знаходять:
де:
Проектування;
Винесення вихідного напрямку будівельної сітки та пунктів;
Визначення координат пунктів будівельної сітки;
Редукування
Проектування;
Винесення вихідного напрямку будівельної сітки та пунктів;
Визначення координат пунктів будівельної сітки;
Редукування

4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка
Проект будівельної сітки
4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка
Проект будівельної сітки

О (0,0)
Y
(200,100)
(300,400)
αO-X=0°0’00’’
X
4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка
Система координат будівельної сітки
О (0,0)
Y
(200,100)
(300,400)
αO-X=0°0’00’’
X
4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка
Система координат будівельної сітки
4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка
Осьовий спосіб розміки будівельної сітки
4.2 Методи створення інженерно-геодезичних мереж. Будівельна сітка
Осьовий спосіб розміки будівельної сітки
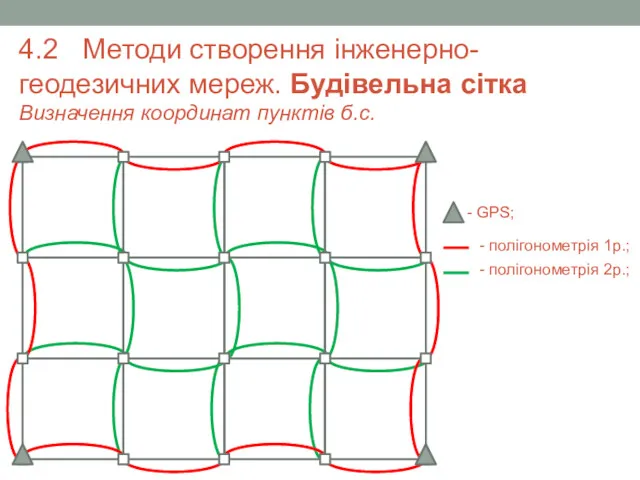
- GPS;
- полігонометрія 1р.;
- полігонометрія 2р.;
4.2 Методи
- GPS;
- полігонометрія 1р.;
- полігонометрія 2р.;
4.2 Методи
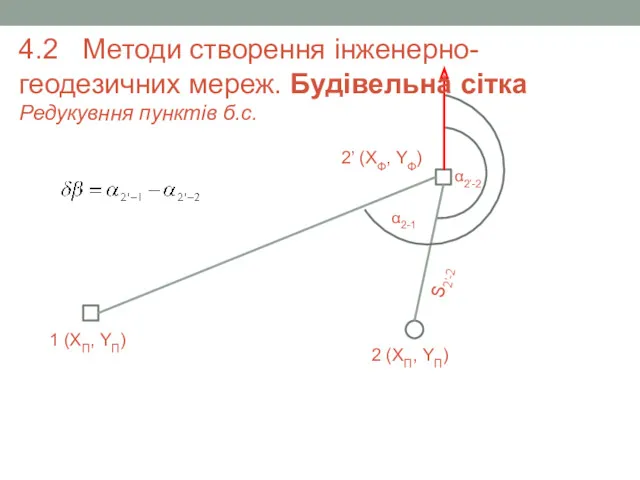
1 (XП, YП)
2’ (XФ, YФ)
2 (XП, YП)
α2-1
α2’-2
S2’-2
4.2 Методи створення інженерно-геодезичних мереж. Будівельна
1 (XП, YП)
2’ (XФ, YФ)
2 (XП, YП)
α2-1
α2’-2
S2’-2
4.2 Методи створення інженерно-геодезичних мереж. Будівельна
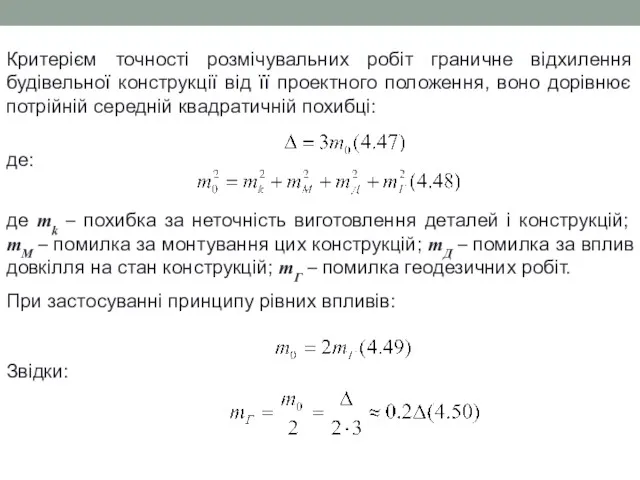
Критерієм точності розмічувальних робіт граничне відхилення будівельної конструкції від її проектного
Критерієм точності розмічувальних робіт граничне відхилення будівельної конструкції від її проектного
С.к.п. геодезичних робітв свою чергу буде складатися з:
де mП – с.к.п.
С.к.п. геодезичних робітв свою чергу буде складатися з:
де mП – с.к.п.
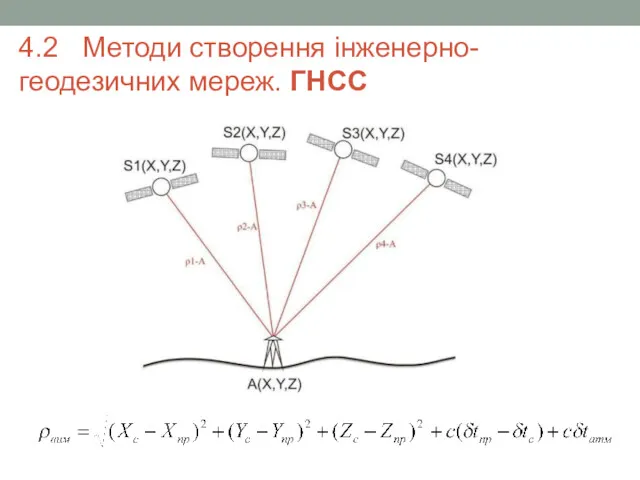
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
статичний режим;
прискорений статичний режим;
режим вимірів "стою-йду";
кінематичний режим вимірів;
кінематичний режим
статичний режим;
прискорений статичний режим;
режим вимірів "стою-йду";
кінематичний режим вимірів;
кінематичний режим
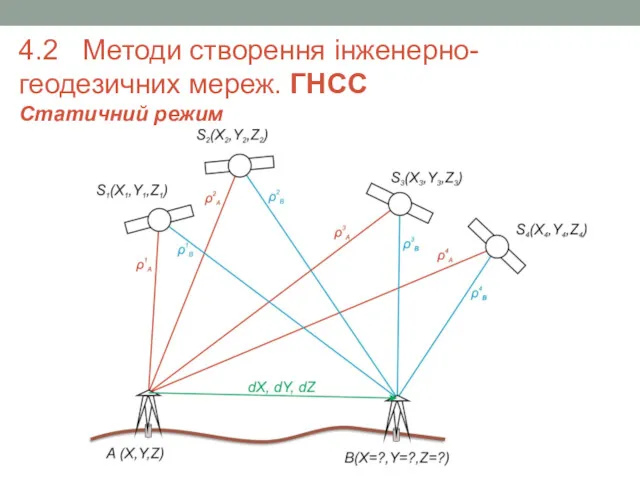
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Статичний режим
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Статичний режим

4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Режим стою-йду
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Режим стою-йду
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Кінематичний режим вимірівҐ
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Кінематичний режим вимірівҐ
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Режим RTK
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Режим RTK

4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Мережі базових станцій
4.2 Методи створення інженерно-геодезичних мереж. ГНСС
Мережі базових станцій

Топографічне знімання
Територія знімання
Топографічне знімання
Територія знімання
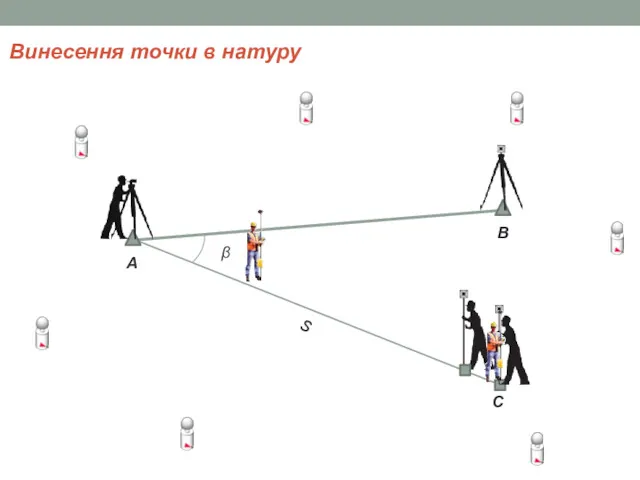
Винесення точки в натуру
β
S
A
B
C
Винесення точки в натуру
β
S
A
B
C
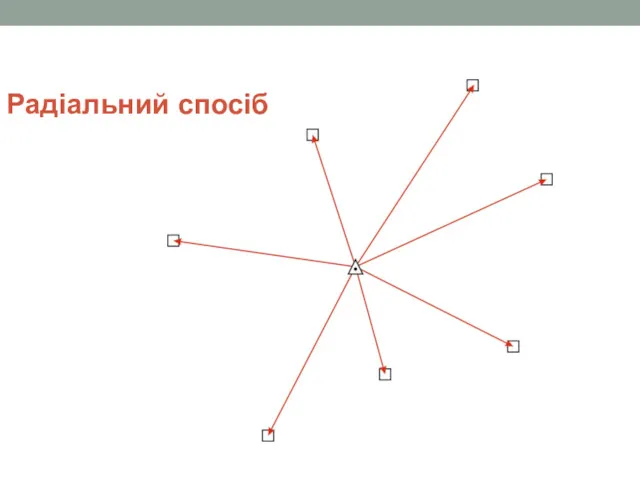
Радіальний спосіб
Радіальний спосіб
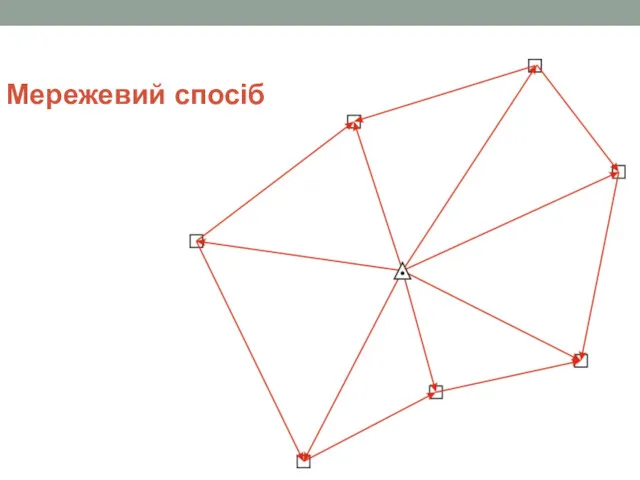
Мережевий спосіб
Мережевий спосіб
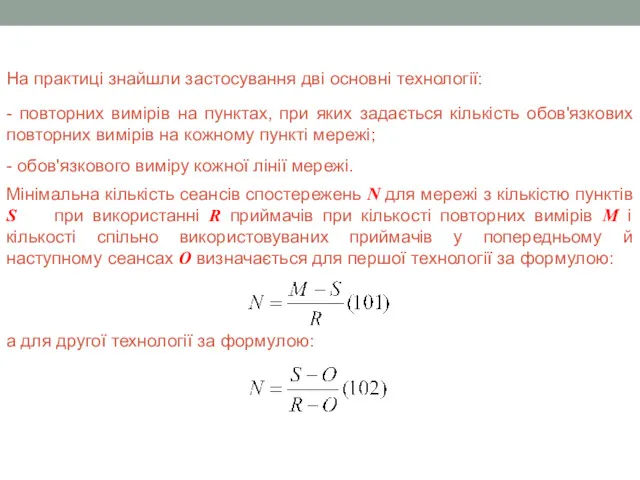
Мінімальна кількість сеансів спостережень N для мережі з кількістю пунктів S
Мінімальна кількість сеансів спостережень N для мережі з кількістю пунктів S
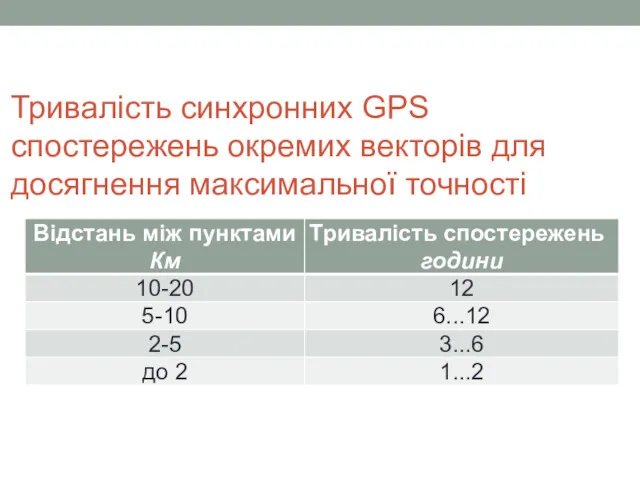
Тривалість синхронних GPS спостережень окремих векторів для досягнення максимальної точності
Тривалість синхронних GPS спостережень окремих векторів для досягнення максимальної точності
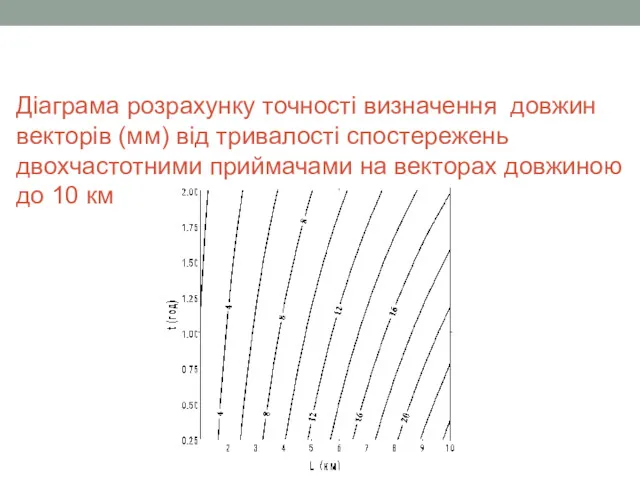
Діаграма розрахунку точності визначення довжин векторів (мм) від тривалості спостережень двохчастотними
Діаграма розрахунку точності визначення довжин векторів (мм) від тривалості спостережень двохчастотними
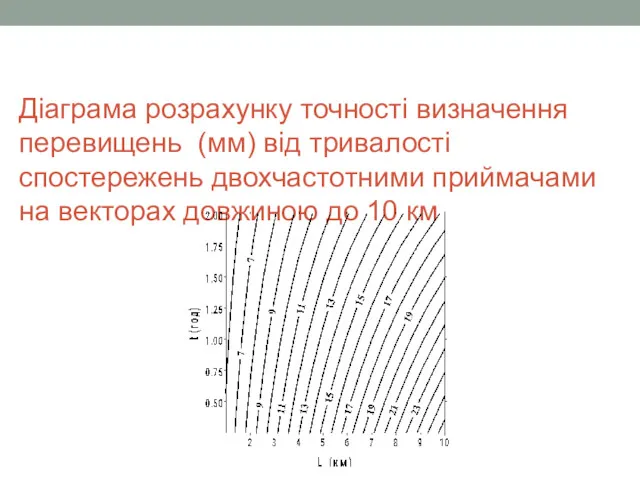
Діаграма розрахунку точності визначення перевищень (мм) від тривалості спостережень двохчастотними приймачами
Діаграма розрахунку точності визначення перевищень (мм) від тривалості спостережень двохчастотними приймачами
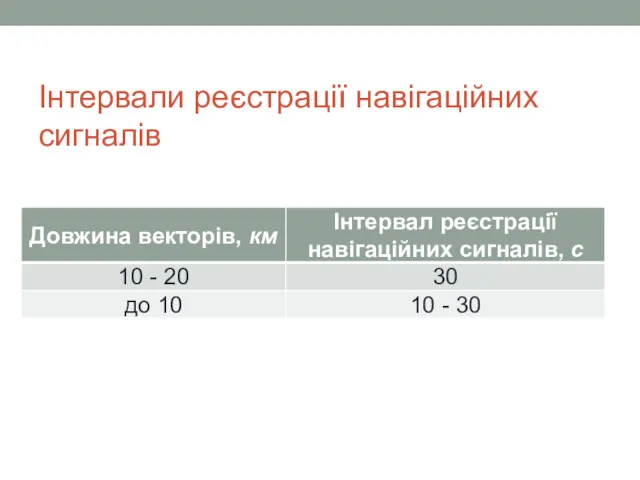
Інтервали реєстрації навігаційних сигналів
Інтервали реєстрації навігаційних сигналів

4.3 Зовнішня розмічувальна мережа будинку
4.3 Зовнішня розмічувальна мережа будинку

Катафоти
Катафоти

4.3 Зовнішня розмічувальна мережа будинку
(Мережа із знаків закріплення основних осей будинку)
4.3 Зовнішня розмічувальна мережа будинку
(Мережа із знаків закріплення основних осей будинку)
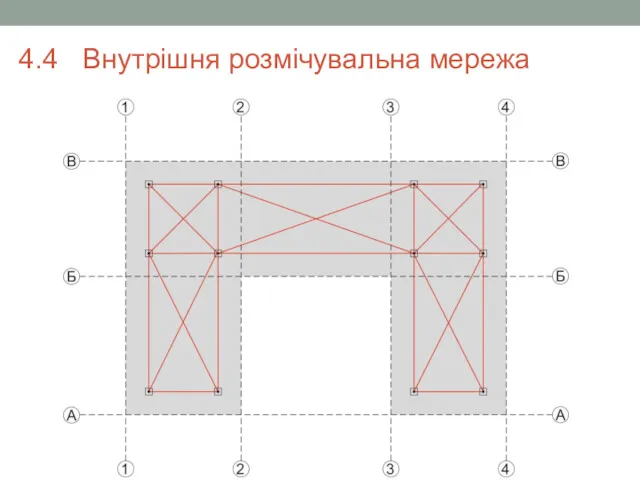
4.4 Внутрішня розмічувальна мережа
4.4 Внутрішня розмічувальна мережа
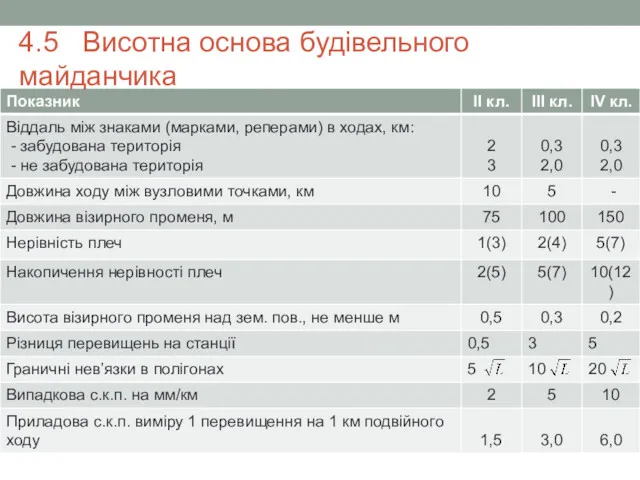
4.5 Висотна основа будівельного майданчика
4.5 Висотна основа будівельного майданчика
4.5 Висотна основа будівельного майданчика
Система висот
4.5 Висотна основа будівельного майданчика
Система висот
Спостереження шкал рейок виконують через бісектор сітки ниток на не парній
Спостереження шкал рейок виконують через бісектор сітки ниток на не парній
Спостереження шкал рейок виконують через бісектор сітки ниток на не парній
Спостереження шкал рейок виконують через бісектор сітки ниток на не парній
 Чтение топографической карты. Военная топография
Чтение топографической карты. Военная топография Население и страны Южной Америки
Население и страны Южной Америки Мировой океан и его части
Мировой океан и его части Реки мира и России
Реки мира и России Почвы степной и сухостепной зон. (Лекция 12, продолжение)
Почвы степной и сухостепной зон. (Лекция 12, продолжение) Города России. Город Иркутск. 2 класс
Города России. Город Иркутск. 2 класс Tourist attractions in the USA
Tourist attractions in the USA Provincia: Murcia
Provincia: Murcia Приборы для измерения погоды
Приборы для измерения погоды Сільськогосподарські ландшафти Поділля
Сільськогосподарські ландшафти Поділля От Ямала до Урала
От Ямала до Урала Влажность воздуха
Влажность воздуха Russia is my country
Russia is my country Презентация Обзор серии учебников по географии издательства Русское слово.
Презентация Обзор серии учебников по географии издательства Русское слово. Климат и внутренние воды Северной Америки
Климат и внутренние воды Северной Америки Материк Антарктида
Материк Антарктида Штат США, Флорида
Штат США, Флорида Atlantika okeani
Atlantika okeani У Черного моря
У Черного моря Достопримечательности Харьковской области
Достопримечательности Харьковской области Города России. Брянск
Города России. Брянск Город Гурьевск
Город Гурьевск Экспедиции Фернана Магеллана
Экспедиции Фернана Магеллана Районы России
Районы России Государство Венесуэла
Государство Венесуэла 10 причин посетить Новоуральск
10 причин посетить Новоуральск Реки и озера Башкирии
Реки и озера Башкирии Природа России
Природа России