Свойства 2-х, 3-х степенных и лазерных гироскопов. Датчики угловых скоростей. Основы теории лазерных гироскопов презентация
- Свойства 2-х, 3-х степенных и лазерных гироскопов. Датчики угловых скоростей. Основы теории лазерных гироскопов

Содержание
- 2. До недавнего времени в системах навигации в основном применялись механические гироскопы, работа-ющие на основе эффекта удержания
- 3. В настоящее время, одним из наиболее перспективных классов гироприборов считается класс оптических гироскопов. Принцип действия большинства
- 4. 15. Эффект Саньяка Эффект Саньяка — появление фазового сдвига - смещения интерференционных полос встречных электромагнитных волн
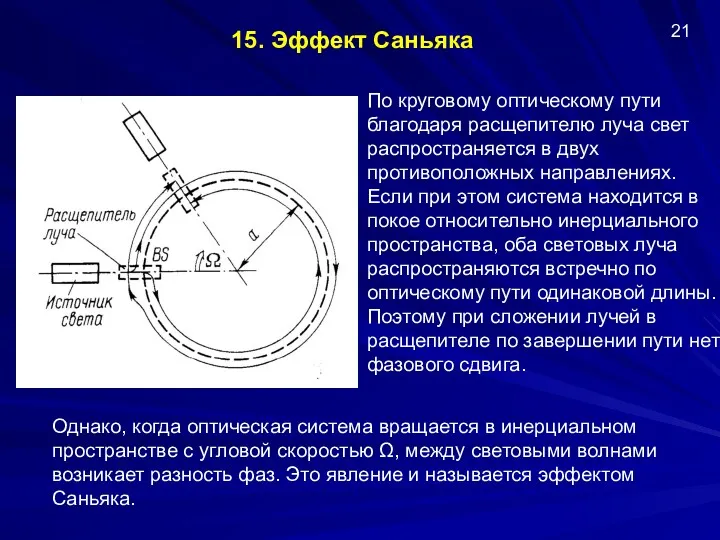
- 5. 15. Эффект Саньяка По круговому оптическому пути благодаря расщепителю луча свет распространяется в двух противоположных направлениях.
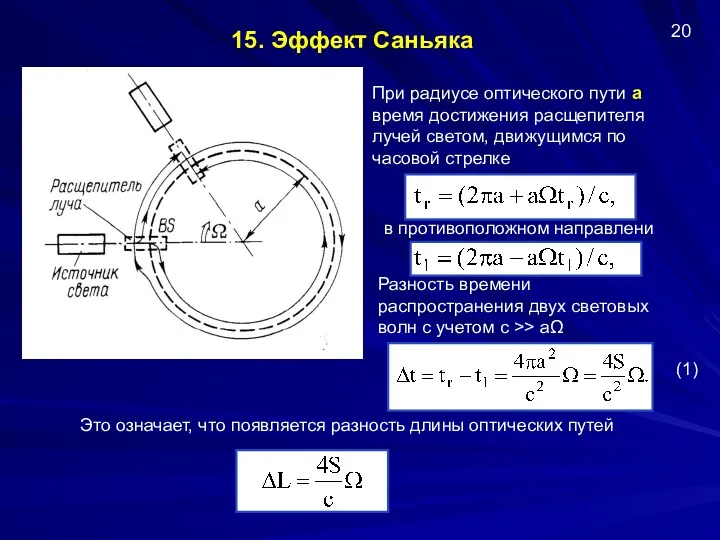
- 6. 15. Эффект Саньяка При радиусе оптического пути a время достижения расщепителя лучей светом, движущимся по часовой
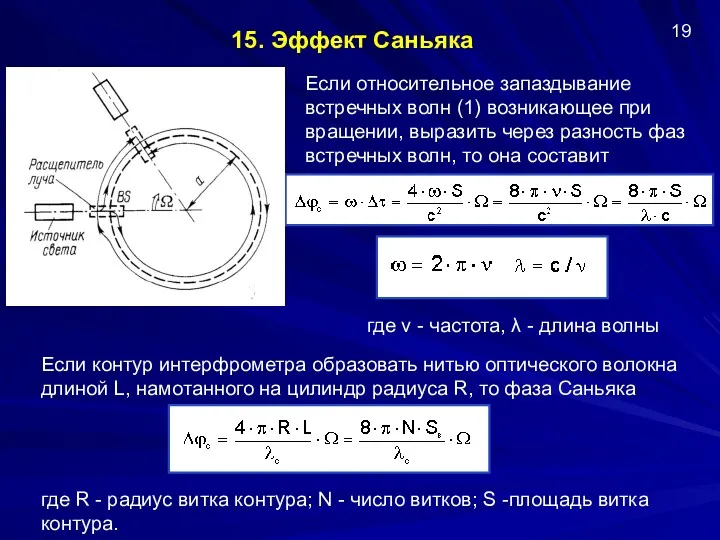
- 7. 15. Эффект Саньяка Если относительное запаздывание встречных волн (1) возникающее при вращении, выразить через разность фаз
- 8. 16. Конструкция лазерного датчика угловой скорости Оптическая гироскопия на эффекте Саньяка реализуется в двух вариантах: -
- 9. Типы оптических гироскопов В зависимости от конструкции замкнутого оптического контура различают два типа оптических гироскопов Кольцевой
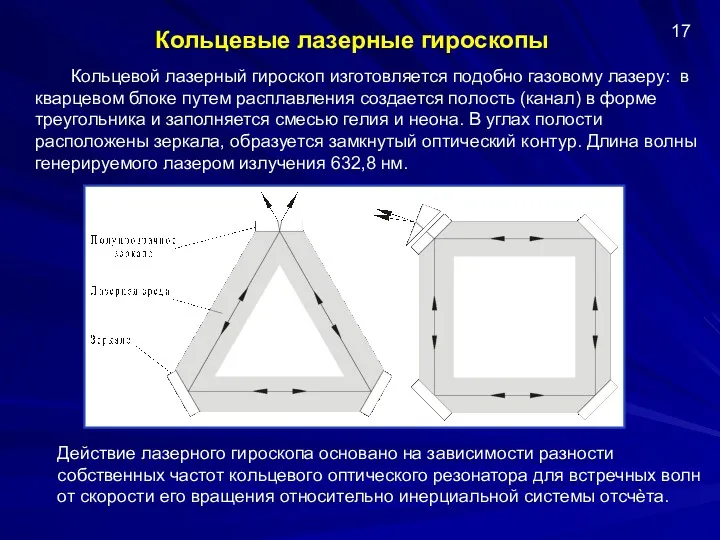
- 10. Кольцевые лазерные гироскопы Кольцевой лазерный гироскоп изготовляется подобно газовому лазеру: в кварцевом блоке путем расплавления создается
- 11. Кольцевые лазерные гироскопы З1 – З3 – зеркала; А – активная среда; З4, З5 – зеркала
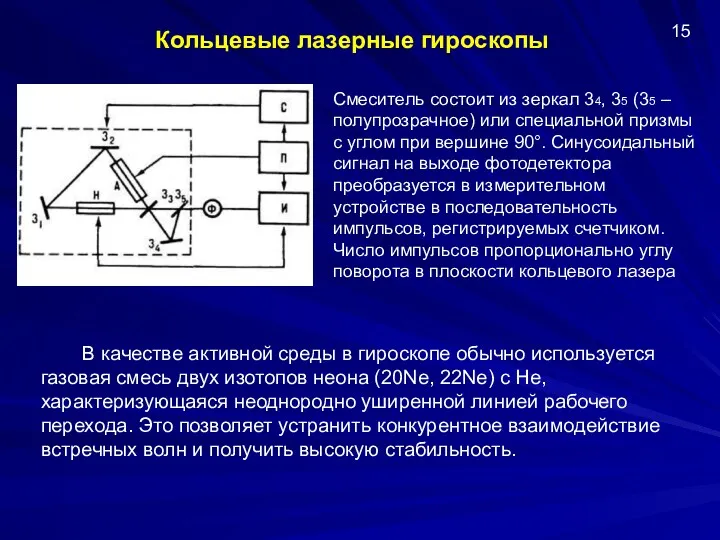
- 12. Кольцевые лазерные гироскопы Смеситель состоит из зеркал 34, 35 (35 – полупрозрачное) или специальной призмы с
- 13. За период частотной подставки на выходе счетчика образуется число N, соответствующее углу поворота прибора: , где
- 14. Кольцевые лазерные гироскопы 13
- 15. Недостатки КЛГ: 1. Нелинейность выходного сигнала при малой угловой скорости (влияние синхронизма) 2. Дрейф выходного сигнала
- 16. Волоконно-оптический лазерный гироскоп Это интерферометр Саньяка в котором круговой оптический контур заменен на катушку из длинного
- 17. Измеряют с высокой точностью изменения фазы (в инерциальной навигации — порядка 10-6 рад), а затем из
- 18. Главными элементами ВОГ являются излучатель, фотоприемник и многовитковый замкнутый контур из одномодового диэлектрического световода с малым
- 19. В кольцевом оптическом резонаторе создаются встречные волны лазерного (когерентного) излучения. В результате их сложения образуется стоячая
- 20. Современные ВОГ российского производства ТИУС-500 ТИУС-200
- 21. Основные области применения:
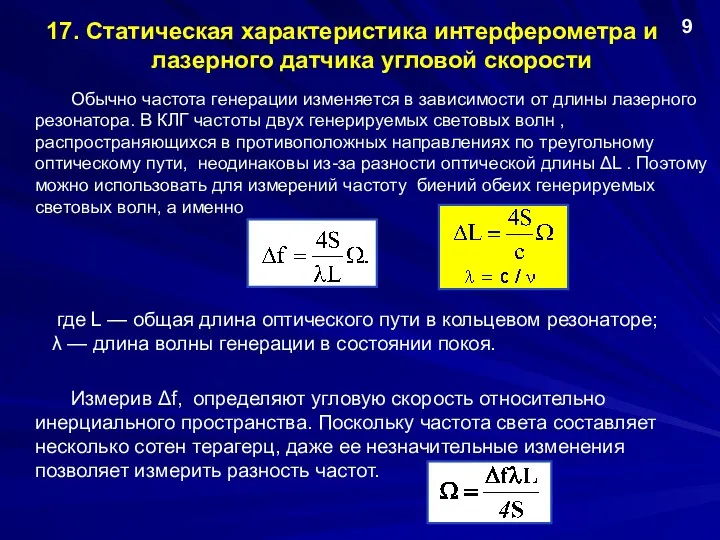
- 23. 17. Статическая характеристика интерферометра и лазерного датчика угловой скорости 9 Обычно частота генерации изменяется в зависимости
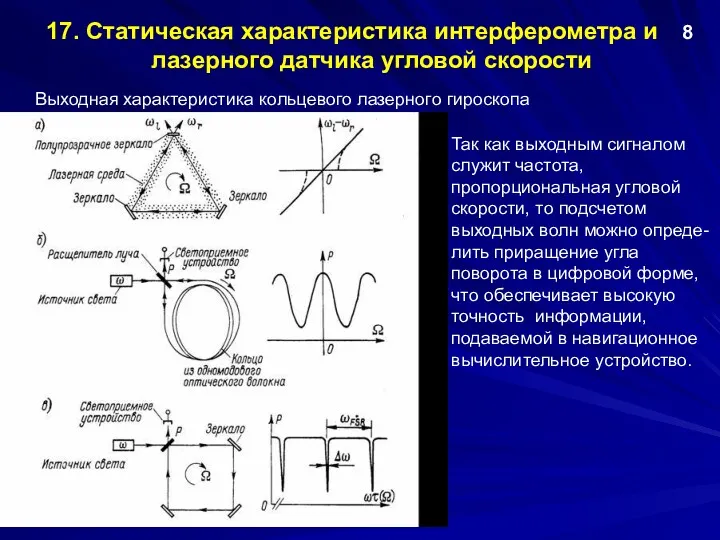
- 24. 17. Статическая характеристика интерферометра и лазерного датчика угловой скорости 8 Выходная характеристика кольцевого лазерного гироскопа Так
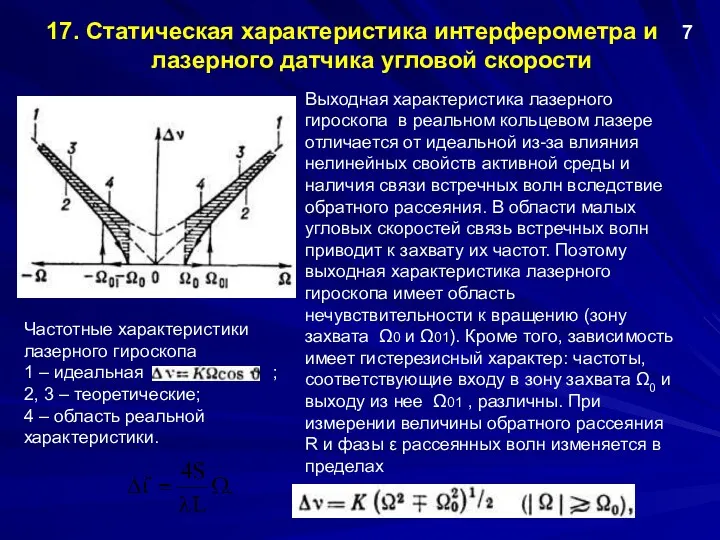
- 25. 17. Статическая характеристика интерферометра и лазерного датчика угловой скорости 7 Выходная характеристика лазерного гироскопа в реальном
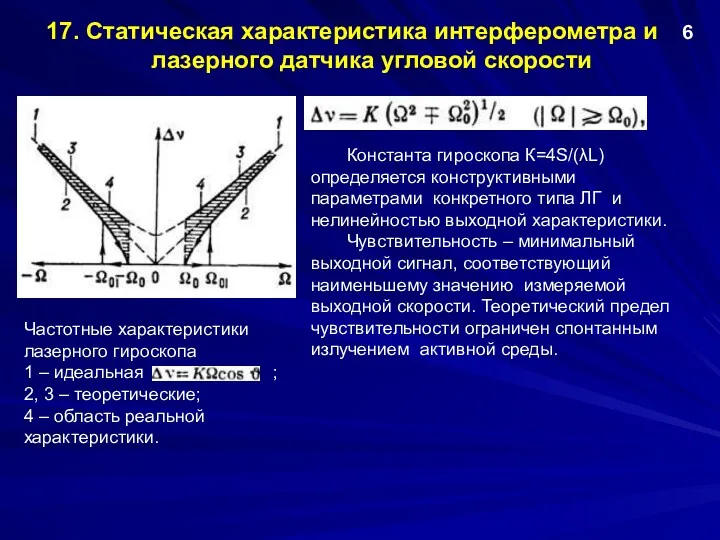
- 26. 17. Статическая характеристика интерферометра и лазерного датчика угловой скорости 6 Константа гироскопа К=4S/(λL) определяется конструктивными параметрами
- 27. 18. Погрешности лазерного датчика угловой скорости и методы их устранения Главными источниками погрешностей для лазерных гироскопов
- 28. 18. Погрешности лазерного датчика угловой скорости и методы их устранения Из этих проблем самой важной является
- 29. 18. Погрешности лазерного датчика угловой скорости и методы их устранения В настоящее время кольцевые лазерные гироскопы
- 30. 18. Погрешности лазерного датчика угловой скорости и методы их устранения При кажущейся простоте и высокой чувствительности
- 32. Скачать презентацию
До недавнего времени в системах навигации в основном применялись механические гироскопы,
До недавнего времени в системах навигации в основном применялись механические гироскопы,
В настоящее время, одним из наиболее перспективных классов гироприборов считается класс
В настоящее время, одним из наиболее перспективных классов гироприборов считается класс
15. Эффект Саньяка
Эффект Саньяка — появление фазового сдвига - смещения
15. Эффект Саньяка
Эффект Саньяка — появление фазового сдвига - смещения
15. Эффект Саньяка
По круговому оптическому пути благодаря расщепителю луча свет
15. Эффект Саньяка
По круговому оптическому пути благодаря расщепителю луча свет
15. Эффект Саньяка
При радиусе оптического пути a время достижения расщепителя
15. Эффект Саньяка
При радиусе оптического пути a время достижения расщепителя
15. Эффект Саньяка
Если относительное запаздывание встречных волн (1) возникающее при
15. Эффект Саньяка
Если относительное запаздывание встречных волн (1) возникающее при
16. Конструкция лазерного датчика угловой скорости
Оптическая гироскопия на эффекте Саньяка реализуется
16. Конструкция лазерного датчика угловой скорости
Оптическая гироскопия на эффекте Саньяка реализуется

Типы оптических гироскопов
В зависимости от конструкции замкнутого оптического контура различают два
Типы оптических гироскопов
В зависимости от конструкции замкнутого оптического контура различают два
Кольцевые лазерные гироскопы
Кольцевой лазерный гироскоп изготовляется подобно газовому лазеру: в кварцевом
Кольцевые лазерные гироскопы
Кольцевой лазерный гироскоп изготовляется подобно газовому лазеру: в кварцевом
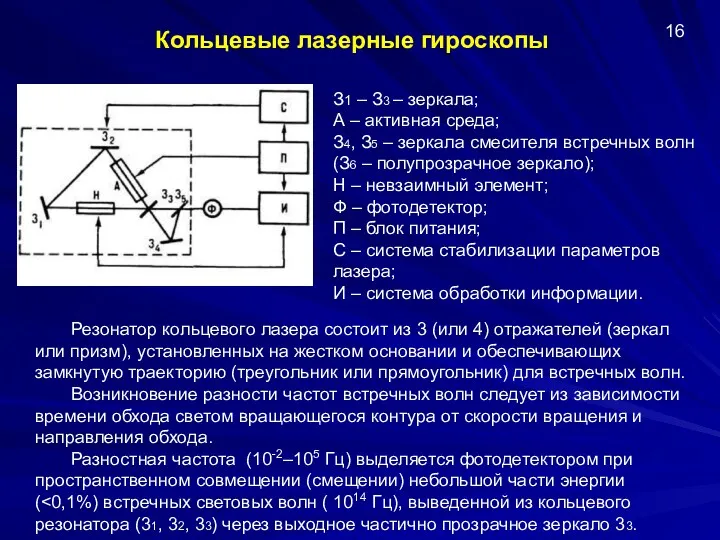
Кольцевые лазерные гироскопы
З1 – З3 – зеркала;
А – активная среда;
Кольцевые лазерные гироскопы
З1 – З3 – зеркала;
А – активная среда;
Кольцевые лазерные гироскопы
Смеситель состоит из зеркал 34, 35 (35 – полупрозрачное)
Кольцевые лазерные гироскопы
Смеситель состоит из зеркал 34, 35 (35 – полупрозрачное)
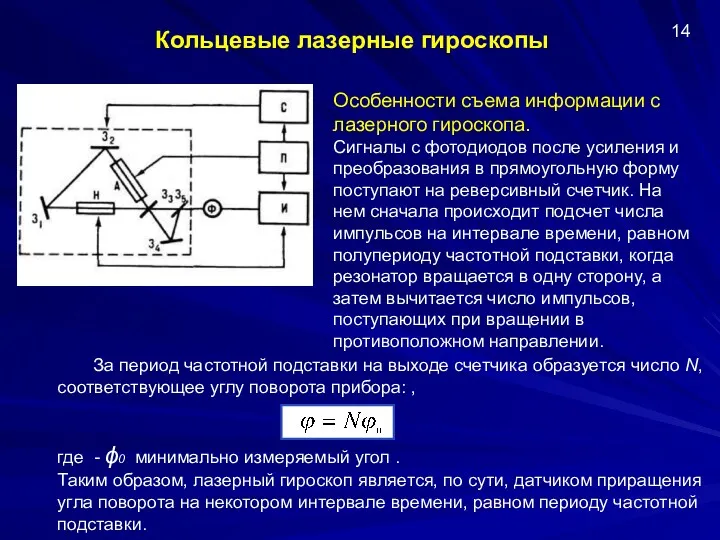
За период частотной подставки на выходе счетчика образуется число N, соответствующее
За период частотной подставки на выходе счетчика образуется число N, соответствующее

Кольцевые лазерные гироскопы
13
Кольцевые лазерные гироскопы
13

Недостатки КЛГ:
1. Нелинейность выходного сигнала при малой угловой скорости (влияние синхронизма)
2.
Недостатки КЛГ:
1. Нелинейность выходного сигнала при малой угловой скорости (влияние синхронизма)
2.

Волоконно-оптический лазерный гироскоп
Это интерферометр Саньяка в котором круговой оптический контур
Волоконно-оптический лазерный гироскоп
Это интерферометр Саньяка в котором круговой оптический контур

Измеряют с высокой точностью изменения фазы (в инерциальной навигации —
Измеряют с высокой точностью изменения фазы (в инерциальной навигации —
Главными элементами ВОГ являются излучатель, фотоприемник и многовитковый замкнутый контур из
Главными элементами ВОГ являются излучатель, фотоприемник и многовитковый замкнутый контур из
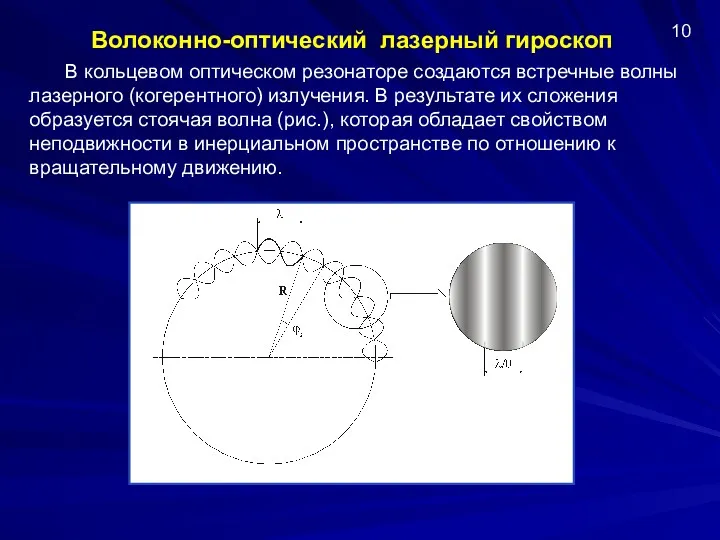
В кольцевом оптическом резонаторе создаются встречные волны лазерного (когерентного) излучения. В
В кольцевом оптическом резонаторе создаются встречные волны лазерного (когерентного) излучения. В

Современные ВОГ российского производства
ТИУС-500
ТИУС-200
Современные ВОГ российского производства
ТИУС-500
ТИУС-200

Основные области применения:
Основные области применения:

17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
9
Обычно частота генерации
17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
9
Обычно частота генерации
17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
8
Выходная характеристика кольцевого
17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
8
Выходная характеристика кольцевого
17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
7
Выходная характеристика лазерного
17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
7
Выходная характеристика лазерного
17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
6
Константа гироскопа К=4S/(λL)
17. Статическая характеристика интерферометра и лазерного датчика угловой скорости
6
Константа гироскопа К=4S/(λL)
18. Погрешности лазерного датчика угловой скорости и методы их устранения
Главными источниками
18. Погрешности лазерного датчика угловой скорости и методы их устранения
Главными источниками
18. Погрешности лазерного датчика угловой скорости и методы их устранения
Из этих
18. Погрешности лазерного датчика угловой скорости и методы их устранения
Из этих
18. Погрешности лазерного датчика угловой скорости и методы их устранения
В настоящее
18. Погрешности лазерного датчика угловой скорости и методы их устранения
В настоящее
18. Погрешности лазерного датчика угловой скорости и методы их устранения
При кажущейся
18. Погрешности лазерного датчика угловой скорости и методы их устранения
При кажущейся
 Состав и функции биосферы
Состав и функции биосферы Иерархия геосистем и морфологическая структура ландшафта. (Тема 2)
Иерархия геосистем и морфологическая структура ландшафта. (Тема 2) Wellness tourism in Switzerland
Wellness tourism in Switzerland Погода, її елементи, типи, зміна в часі
Погода, її елементи, типи, зміна в часі Северо-западный экономический район Российской Федерации
Северо-западный экономический район Российской Федерации Кліматичні пояси і типи клімату Африки. Практична робота 4
Кліматичні пояси і типи клімату Африки. Практична робота 4 Разбор заданий Регионального этапа Всероссийской олимпиады школьников по географии
Разбор заданий Регионального этапа Всероссийской олимпиады школьников по географии Интересные факты о Сербии
Интересные факты о Сербии Центр тяготения. ДНП Долина ветров. Лесколово
Центр тяготения. ДНП Долина ветров. Лесколово Масштаб. 6 класс. Тест
Масштаб. 6 класс. Тест Миграционные процессы Краснодарского края
Миграционные процессы Краснодарского края Удивительная Испания
Удивительная Испания Понятие о природном территориальном комплексе
Понятие о природном территориальном комплексе Свободные экономические зоны Китая
Свободные экономические зоны Китая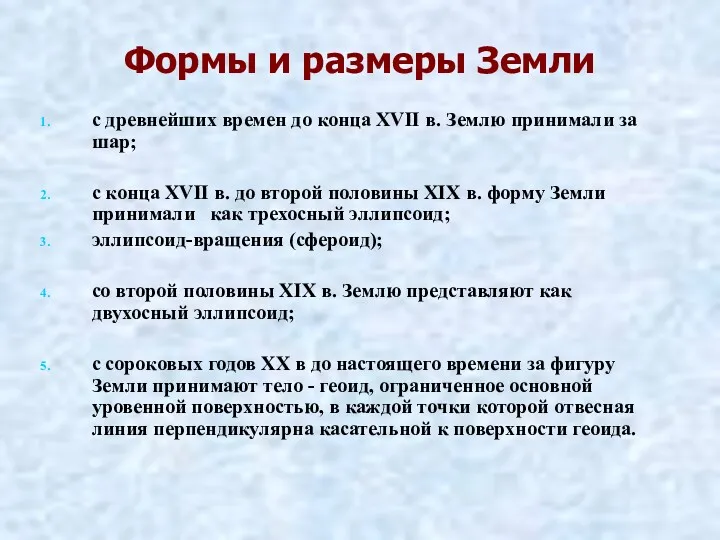 Формы и размеры Земли
Формы и размеры Земли Виртуальная экскурсия по полуострову Крым
Виртуальная экскурсия по полуострову Крым Нации и межнациональные отношения
Нации и межнациональные отношения Моя малая Родина
Моя малая Родина Россия
Россия Экономико-географическая характеристика Великобритании
Экономико-географическая характеристика Великобритании Аксу-Жабаглинский и Устюртский заповедники
Аксу-Жабаглинский и Устюртский заповедники Почва. 6 класс
Почва. 6 класс Наш край. Республика Коми
Наш край. Республика Коми Природні передумови винекнення рекреаційних комплексів Європи
Природні передумови винекнення рекреаційних комплексів Європи Динамическая геология
Динамическая геология Реки - артерии Земли
Реки - артерии Земли Країни Африки
Країни Африки Тайга. Уссурийская тайга
Тайга. Уссурийская тайга