- Тематическая обработка космических снимков. Понятие о геоинформационных системах

Содержание
- 2. Задачи (операции) тематической обработки космического снимка 1 Отнесение объекта к какой-либо классификационной группе происходит по набору
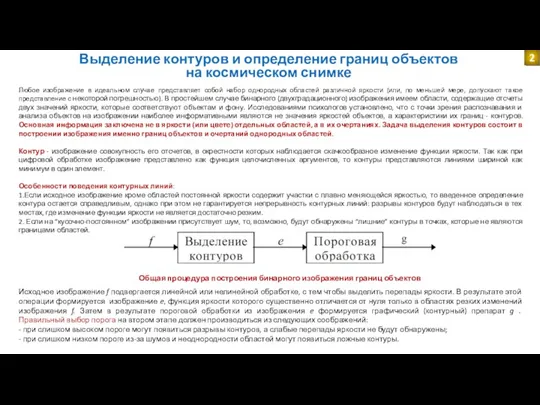
- 3. Выделение контуров и определение границ объектов на космическом снимке 2 Любое изображение в идеальном случае представляет
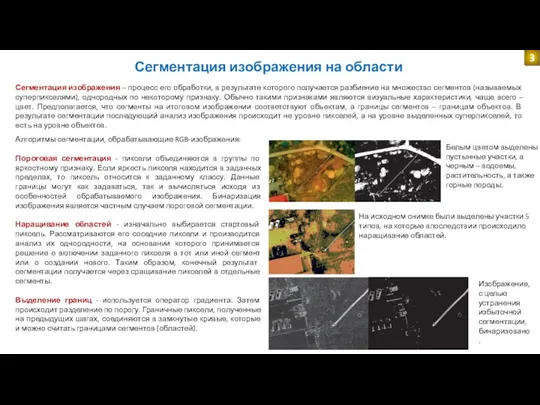
- 4. Сегментация изображения на области 3 Сегментация изображения – процесс его обработки, в результате которого получается разбиение
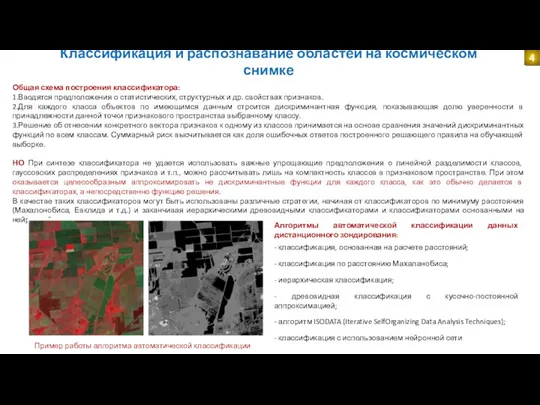
- 5. Классификация и распознавание областей на космическом снимке 4 Общая схема построения классификатора: 1.Вводятся предположения о статистических,
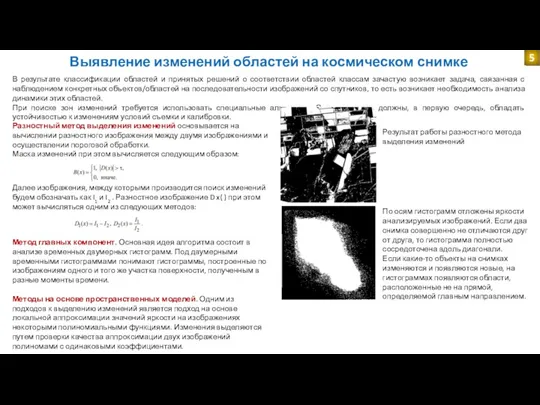
- 6. Выявление изменений областей на космическом снимке 5 В результате классификации областей и принятых решений о соответствии
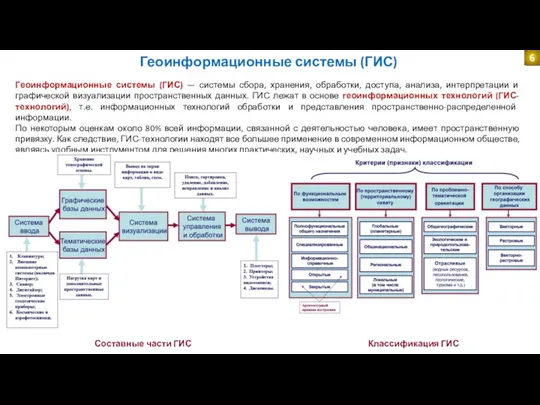
- 7. Геоинформационные системы (ГИС) 6 Геоинформационные системы (ГИС) — системы сбора, хранения, обработки, доступа, анализа, интерпретации и
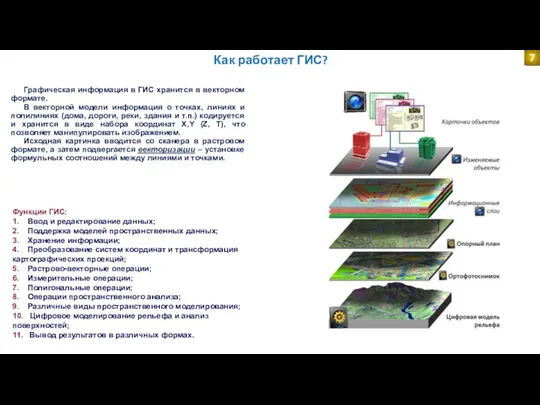
- 8. Как работает ГИС? Функции ГИС: 1. Ввод и редактирование данных; 2. Поддержка моделей пространственных данных; 3.
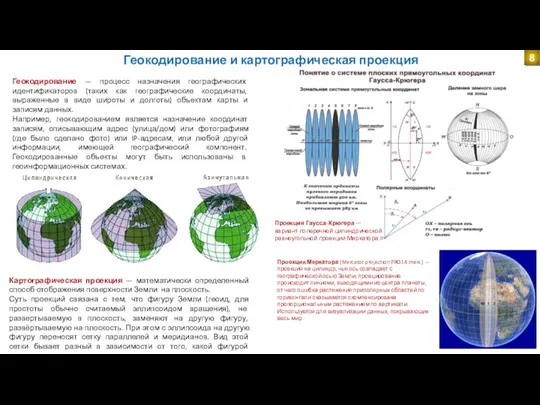
- 9. Геокодирование и картографическая проекция Геокодирование — процесс назначения географических идентификаторов (таких как географические координаты, выраженные в
- 10. Примеры ГИС-систем 2ГИС 2-ГИС - геоинформационная система Москвы, Петербурга и других городов России и городской информационный
- 11. Примеры ГИС-систем ArcGIS ArcGIS — семейство геоинформационных программных продуктов американской компании ESRI. Применяются для земельных кадастров,
- 12. GeoMedia Примеры ГИС-систем GeoMedia — это и ГИС-технология, и семейство ГИС-продуктов, разработанных корпорацией INTERGRAPH. Технология GeoMedia
- 13. Примеры ГИС-систем Яндекс-КАРТЫ Яндекс.Карты — поисково-информационная картографическая служба Яндекса. Открыта в 2004 г. Возможности: поиск по
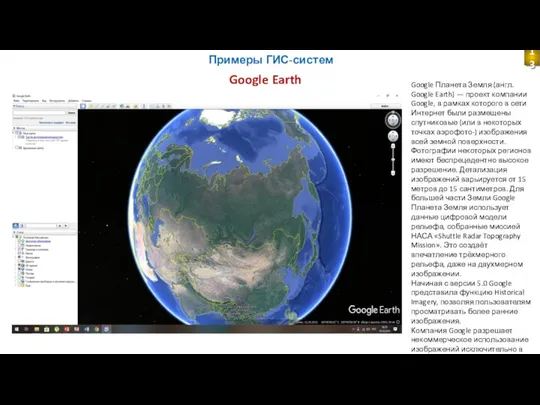
- 14. Примеры ГИС-систем Google Планета Земля (англ. Google Earth) — проект компании Google, в рамках которого в
- 15. Примеры снимков из Google Earth АО «ЦНИИмаш» Космический центр NASA в Хьюстоне (Хьюстон, США) Космодром Восточный
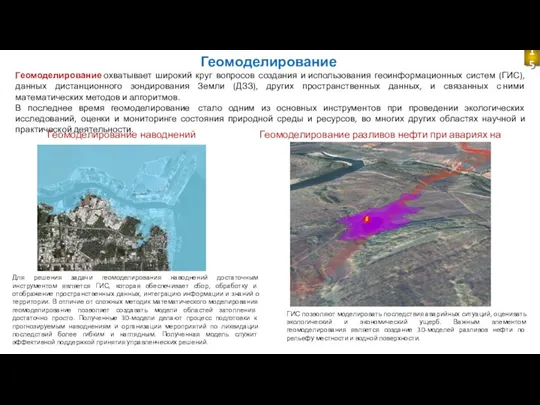
- 16. Геомоделирование Геомоделирование охватывает широкий круг вопросов создания и использования геоинформационных систем (ГИС), данных дистанционного зондирования Земли
- 17. Перспективы дистанционного зондирования Земли из космоса
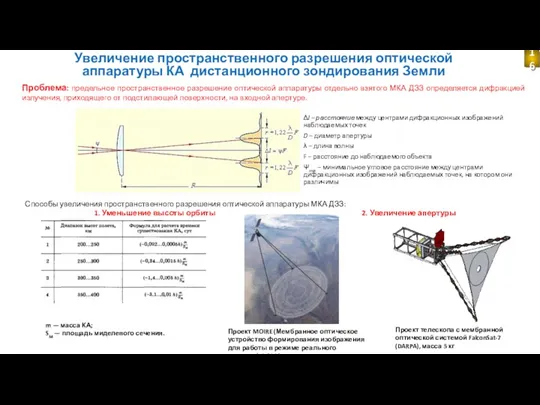
- 18. Увеличение пространственного разрешения оптической аппаратуры КА дистанционного зондирования Земли Проблема: предельное пространственное разрешение оптической аппаратуры отдельно
- 19. Увеличение пространственного разрешения оптической аппаратуры малого КА дистанционного зондирования Земли Способы увеличения пространственного разрешения оптической аппаратуры
- 20. Cистема космических аппаратов группового полета 18
- 21. Общее определение кластера космических аппаратов Кластер КА (кластерная система КА группового полета) - совокупность однотипных КА
- 22. Синтезирование оптического изображения из субапертурных изображений, получаемыми отдельными малыми КА ДЗЗ Функционирование кластера МКА ДЗЗ основано
- 23. Логика целевого функционирования кластера МКА ДЗЗ (перспектива) 21 Целевое функционирование кластера МКА ДЗЗ состоит в съемке
- 24. Роевый интеллект. Роевое управление. Мультиагентный подход к управлению кластером МКА ДЗЗ. Роевой интеллект — это система,
- 26. Скачать презентацию
Задачи (операции) тематической обработки космического снимка
1
Отнесение объекта к какой-либо классификационной группе
Задачи (операции) тематической обработки космического снимка
1
Отнесение объекта к какой-либо классификационной группе
Выделение контуров и определение границ объектов
на космическом снимке
2
Любое изображение в идеальном
Выделение контуров и определение границ объектов
на космическом снимке
2
Любое изображение в идеальном
Сегментация изображения на области
3
Сегментация изображения – процесс его обработки, в результате
Сегментация изображения на области
3
Сегментация изображения – процесс его обработки, в результате
Классификация и распознавание областей на космическом снимке
4
Общая схема построения классификатора:
1.Вводятся
Классификация и распознавание областей на космическом снимке
4
Общая схема построения классификатора:
1.Вводятся
Выявление изменений областей на космическом снимке
5
В результате классификации областей и принятых
Выявление изменений областей на космическом снимке
5
В результате классификации областей и принятых
Геоинформационные системы (ГИС)
6
Геоинформационные системы (ГИС) — системы сбора, хранения, обработки,
Геоинформационные системы (ГИС)
6
Геоинформационные системы (ГИС) — системы сбора, хранения, обработки,
Как работает ГИС?
Функции ГИС:
1. Ввод и редактирование данных;
2. Поддержка моделей пространственных
Как работает ГИС?
Функции ГИС:
1. Ввод и редактирование данных;
2. Поддержка моделей пространственных
Геокодирование и картографическая проекция
Геокодирование — процесс назначения географических идентификаторов (таких
Геокодирование и картографическая проекция
Геокодирование — процесс назначения географических идентификаторов (таких
Примеры ГИС-систем
2ГИС
2-ГИС - геоинформационная система Москвы, Петербурга и других городов России
Примеры ГИС-систем
2ГИС
2-ГИС - геоинформационная система Москвы, Петербурга и других городов России
Примеры ГИС-систем
ArcGIS
ArcGIS — семейство геоинформационных программных продуктов американской компании ESRI. Применяются
Примеры ГИС-систем
ArcGIS
ArcGIS — семейство геоинформационных программных продуктов американской компании ESRI. Применяются
GeoMedia
Примеры ГИС-систем
GeoMedia — это и ГИС-технология, и семейство ГИС-продуктов, разработанных корпорацией
GeoMedia
Примеры ГИС-систем
GeoMedia — это и ГИС-технология, и семейство ГИС-продуктов, разработанных корпорацией
Примеры ГИС-систем
Яндекс-КАРТЫ
Яндекс.Карты — поисково-информационная картографическая служба Яндекса. Открыта в 2004 г.
Примеры ГИС-систем
Яндекс-КАРТЫ
Яндекс.Карты — поисково-информационная картографическая служба Яндекса. Открыта в 2004 г.
Примеры ГИС-систем
Google Планета Земля (англ. Google Earth) — проект компании Google,
Примеры ГИС-систем
Google Планета Земля (англ. Google Earth) — проект компании Google,

Примеры снимков из Google Earth
АО «ЦНИИмаш»
Космический центр NASA в Хьюстоне (Хьюстон,
Примеры снимков из Google Earth
АО «ЦНИИмаш»
Космический центр NASA в Хьюстоне (Хьюстон,
Геомоделирование
Геомоделирование охватывает широкий круг вопросов создания и использования геоинформационных систем (ГИС), данных
Геомоделирование
Геомоделирование охватывает широкий круг вопросов создания и использования геоинформационных систем (ГИС), данных
Перспективы дистанционного зондирования Земли из космоса
Перспективы дистанционного зондирования Земли из космоса
Увеличение пространственного разрешения оптической аппаратуры КА дистанционного зондирования Земли
Проблема: предельное пространственное
Увеличение пространственного разрешения оптической аппаратуры КА дистанционного зондирования Земли
Проблема: предельное пространственное
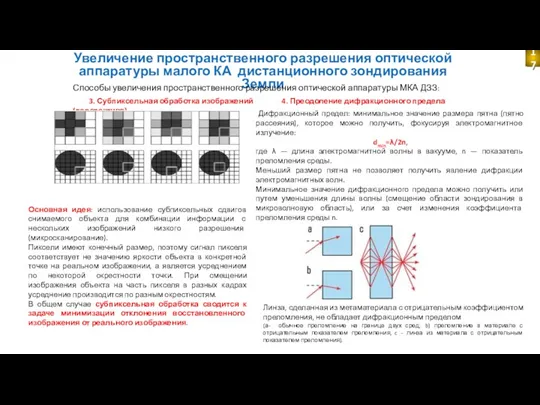
Увеличение пространственного разрешения оптической аппаратуры малого КА дистанционного зондирования Земли
Способы увеличения
Увеличение пространственного разрешения оптической аппаратуры малого КА дистанционного зондирования Земли
Способы увеличения
Cистема космических аппаратов группового полета
18
Cистема космических аппаратов группового полета
18
Общее определение кластера
космических аппаратов
Кластер КА (кластерная система КА группового полета)
Общее определение кластера
космических аппаратов
Кластер КА (кластерная система КА группового полета)
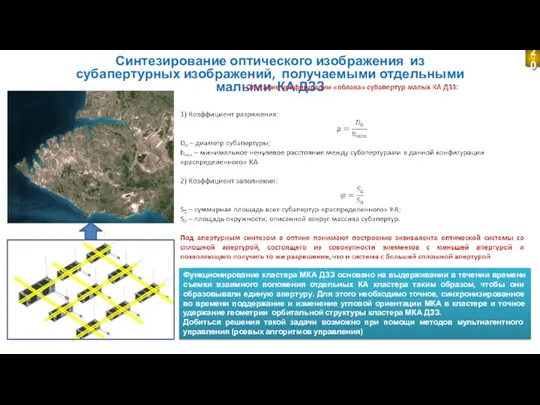
Синтезирование оптического изображения из субапертурных изображений, получаемыми отдельными малыми КА ДЗЗ
Функционирование
Синтезирование оптического изображения из субапертурных изображений, получаемыми отдельными малыми КА ДЗЗ
Функционирование

Логика целевого функционирования кластера МКА ДЗЗ (перспектива)
21
Целевое функционирование кластера МКА ДЗЗ
Логика целевого функционирования кластера МКА ДЗЗ (перспектива)
21
Целевое функционирование кластера МКА ДЗЗ
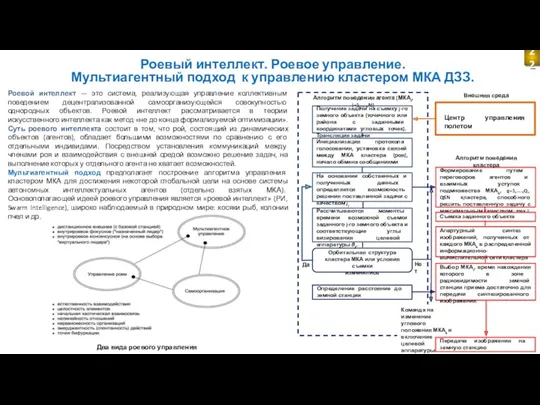
Роевый интеллект. Роевое управление.
Мультиагентный подход к управлению кластером МКА ДЗЗ.
Роевой
Роевый интеллект. Роевое управление.
Мультиагентный подход к управлению кластером МКА ДЗЗ.
Роевой
 Индия (Гоа)
Индия (Гоа) История исследования Красноярского края
История исследования Красноярского края Географическое положение и границы России
Географическое положение и границы России Системы координат, используемые в геодезии
Системы координат, используемые в геодезии Миграционные процессы в Европе
Миграционные процессы в Европе Топырақтану – топырақ туралы ғылым
Топырақтану – топырақ туралы ғылым Семь чудес Украины
Семь чудес Украины Население Республики Беларусь
Население Республики Беларусь Формы залегания осадочных горных пород
Формы залегания осадочных горных пород Изображение рельефа горизонталями. Высота относительная. Высота абсолютная
Изображение рельефа горизонталями. Высота относительная. Высота абсолютная Австралийский Союз
Австралийский Союз Озёра, ледники
Озёра, ледники Вашингтон
Вашингтон Алтайский край как субъект РФ
Алтайский край как субъект РФ Состав почвы. Защита почв
Состав почвы. Защита почв Германия. 7 класс
Германия. 7 класс Формирование языков и их влияние на образование этносов и государств
Формирование языков и их влияние на образование этносов и государств Ландшафтное картографирование
Ландшафтное картографирование Рельеф и полезные ископаемые нижегородской области
Рельеф и полезные ископаемые нижегородской области Детские экскурсии в Воронеж от Мариника-тур
Детские экскурсии в Воронеж от Мариника-тур Татарстан Республикасы һәм аның орнаментлары
Татарстан Республикасы һәм аның орнаментлары Объекты природного наследия Австралии и Океании
Объекты природного наследия Австралии и Океании Нигерия. Федеральная республика Нигерия
Нигерия. Федеральная республика Нигерия Индия. 7 класс
Индия. 7 класс Республика Северная Осетия
Республика Северная Осетия Путешествие по материкам
Путешествие по материкам Добро пожаловать в Бразилию
Добро пожаловать в Бразилию Республика Беларусь. Минск
Республика Беларусь. Минск