- Теория стереопары снимков

Содержание
- 2. 5.1 Элементы ориентирования стереопары По одиночному снимку можно получить лишь две пространственные координаты Х, Y. Для
- 3. На практике фотографирование с двух точек базиса чаще всего выполняют одной и той же фотокамерой, поэтому
- 4. Запишем элементы внешнего ориентирования пары снимков: XS1, YS1, ZS1, α1, ω1, χ1 – элементы внешнего ориентирования
- 5. Разности координат ΔXS, ΔYS, ΔZS представляют собой проекции базиса фотографирования В на соответствующие координатные оси. Их
- 6. Таким образом, элементы внешнего ориентирования стереоскопической пары снимков можно представить в виде следующих двенадцати величин: XS1,
- 7. 5.2 Формулы координат и превышений для стереопары горизонтальных снимков Рисунок 5.1 – К выводу формул координат
- 8. Разность абсцисс x1 - х2 = р одной и той же точки на левом и правом
- 9. Аналогично можно определить ординату YА точки А: (5.4) Рассмотрим величину продольного параллакса р. Из (1) можно
- 10. Формулы превышений для стереопары горизонтальных снимков h = HE - HA. (5.6) где величина рА –
- 11. где Н – высота фотографирования над начальной точкой; b – базис фотографирования в масштабе изображения начальной
- 12. 5.3 Взаимное ориентирование снимков
- 13. Условие взаимного ориентирования снимков Важное свойство элементов взаимного ориентирования состоит в том, что, зная их, можно
- 14. Взаимное ориентирование двух снимков стереопары можно выполнить двумя основными способами: оставив левый снимок P1 неподвижным, развернуть
- 15. Рисунок 5.3 – Элементы взаимного ориентирования стереопары в системе координат левого снимка
- 16. В системе координат левого снимка за начало координат принимают центр проекции S1 левого снимка (рисунок 5.3).
- 17. Рисунок 5.4 – Элементы взаимного ориентирования стереопары в базисной системе
- 18. В базисной системе (рисунок 5.4) элементами взаимного ориентирования являются: α1′ - угол в главной базисной плоскости
- 19. Определение элементов взаимного ориентирования по стандартно расположенным точкам Рисунок 5.5 – Схема стандартного расположения точек на
- 20. Вычисляют элементы взаимного ориентирования: Δα – разность продольных углов наклона левого и правого снимков; Δω –
- 21. Для базисной системы вычисляют элементы взаимного ориентирования по формулам: (5.11)
- 22. Геометрическая модель, получаемая в результате выполнения процесса взаимного ориентирования стереопары снимков, произвольно расположена относительно геодезической системы
- 23. 5.4 Элементы внешнего ориентирования геометрической модели И в том и в другом случае внешнее ориентирование сводится
- 24. Если элементы внешнего ориентирования модели известны, то геодезические координаты Хг, Уг, Zг любой точки на этой
- 25. В формулах 5.12 семь неизвестных элементов внешнего ориентирования. Одна опорная геодезическая точка, имеющая три пространственные координаты
- 27. Скачать презентацию
5.1 Элементы ориентирования стереопары
По одиночному снимку можно получить лишь две пространственные
5.1 Элементы ориентирования стереопары
По одиночному снимку можно получить лишь две пространственные
На практике фотографирование с двух точек базиса чаще всего выполняют одной
На практике фотографирование с двух точек базиса чаще всего выполняют одной
Запишем элементы внешнего ориентирования пары снимков:
XS1, YS1, ZS1, α1, ω1, χ1
Запишем элементы внешнего ориентирования пары снимков:
XS1, YS1, ZS1, α1, ω1, χ1
Разности координат ΔXS, ΔYS, ΔZS представляют собой проекции базиса фотографирования В
Разности координат ΔXS, ΔYS, ΔZS представляют собой проекции базиса фотографирования В
Таким образом, элементы внешнего ориентирования стереоскопической пары снимков можно представить в
Таким образом, элементы внешнего ориентирования стереоскопической пары снимков можно представить в
5.2 Формулы координат и превышений для стереопары горизонтальных снимков
Рисунок 5.1 –
5.2 Формулы координат и превышений для стереопары горизонтальных снимков
Рисунок 5.1 –
Разность абсцисс x1 - х2 = р одной и той же
Разность абсцисс x1 - х2 = р одной и той же
Аналогично можно определить ординату YА точки А:
(5.4)
Рассмотрим величину продольного параллакса р.
Аналогично можно определить ординату YА точки А:
(5.4)
Рассмотрим величину продольного параллакса р.
Формулы превышений для стереопары горизонтальных снимков
h = HE - HA. (5.6)
где величина
Формулы превышений для стереопары горизонтальных снимков
h = HE - HA. (5.6)
где величина
где Н – высота фотографирования над начальной точкой; b – базис
где Н – высота фотографирования над начальной точкой; b – базис
5.3 Взаимное ориентирование снимков
5.3 Взаимное ориентирование снимков
Условие взаимного ориентирования снимков
Важное свойство элементов взаимного ориентирования состоит в том,
Условие взаимного ориентирования снимков
Важное свойство элементов взаимного ориентирования состоит в том,
Взаимное ориентирование двух снимков стереопары можно выполнить двумя основными способами:
оставив
Взаимное ориентирование двух снимков стереопары можно выполнить двумя основными способами:
оставив
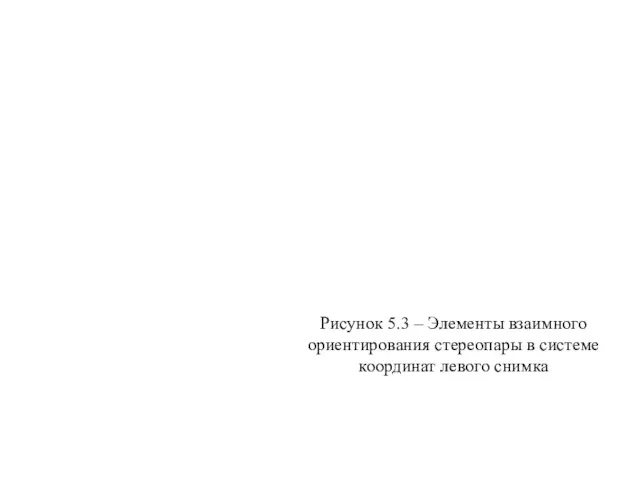
Рисунок 5.3 – Элементы взаимного ориентирования стереопары в системе координат левого
Рисунок 5.3 – Элементы взаимного ориентирования стереопары в системе координат левого
В системе координат левого снимка за начало координат принимают центр проекции
В системе координат левого снимка за начало координат принимают центр проекции
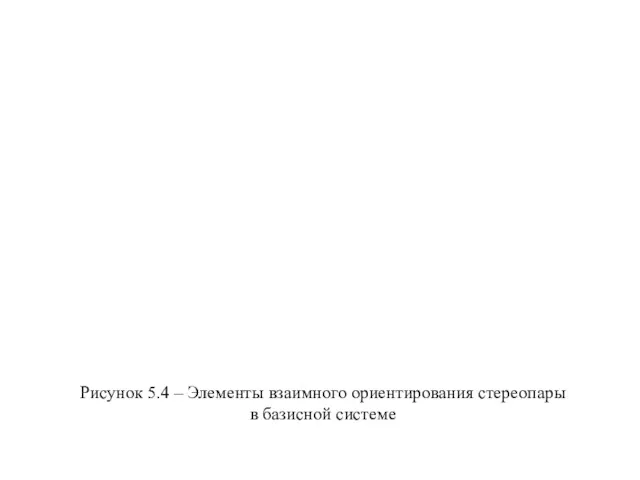
Рисунок 5.4 – Элементы взаимного ориентирования стереопары в базисной системе
Рисунок 5.4 – Элементы взаимного ориентирования стереопары в базисной системе
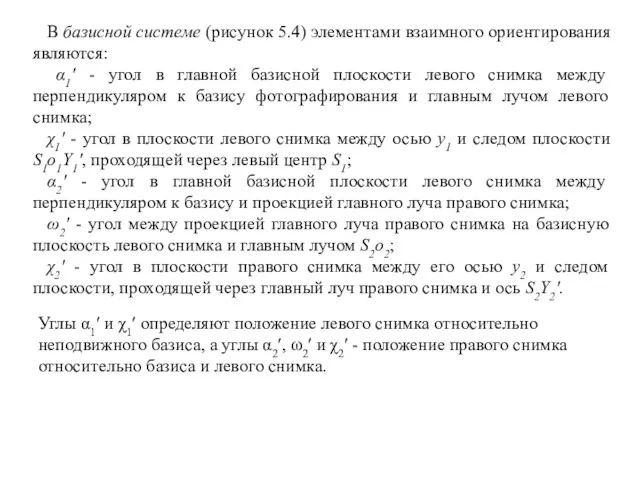
В базисной системе (рисунок 5.4) элементами взаимного ориентирования являются:
α1′ -
В базисной системе (рисунок 5.4) элементами взаимного ориентирования являются:
α1′ -
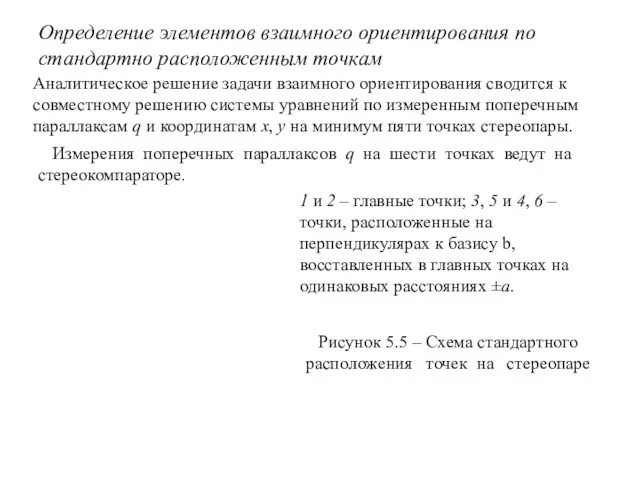
Определение элементов взаимного ориентирования по стандартно расположенным точкам
Рисунок 5.5 – Схема
Определение элементов взаимного ориентирования по стандартно расположенным точкам
Рисунок 5.5 – Схема
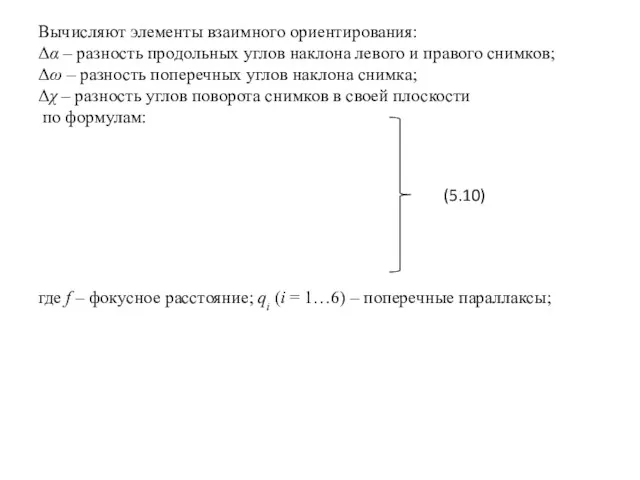
Вычисляют элементы взаимного ориентирования:
Δα – разность продольных углов наклона левого и
Вычисляют элементы взаимного ориентирования:
Δα – разность продольных углов наклона левого и
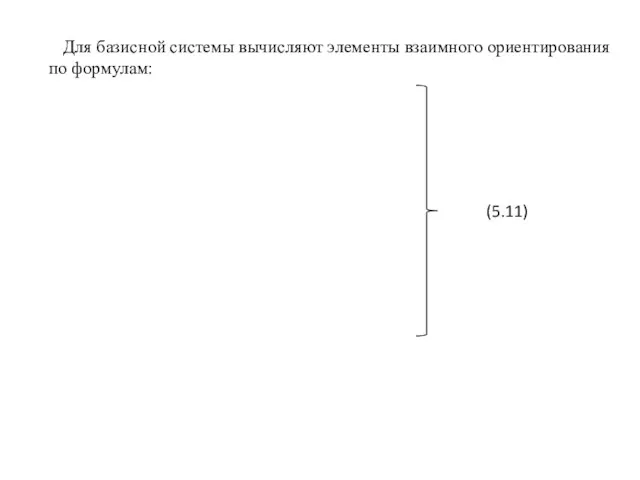
Для базисной системы вычисляют элементы взаимного ориентирования по формулам:
(5.11)
Для базисной системы вычисляют элементы взаимного ориентирования по формулам:
(5.11)
Геометрическая модель, получаемая в результате выполнения процесса взаимного ориентирования стереопары снимков,
Геометрическая модель, получаемая в результате выполнения процесса взаимного ориентирования стереопары снимков,
5.4 Элементы внешнего ориентирования геометрической модели
И в том и в другом
5.4 Элементы внешнего ориентирования геометрической модели
И в том и в другом
Если элементы внешнего ориентирования модели известны, то геодезические координаты Хг, Уг,
Если элементы внешнего ориентирования модели известны, то геодезические координаты Хг, Уг,
В формулах 5.12 семь неизвестных элементов внешнего ориентирования. Одна опорная геодезическая
В формулах 5.12 семь неизвестных элементов внешнего ориентирования. Одна опорная геодезическая
 Юг России. Географическое Положение района
Юг России. Географическое Положение района Она бывает низкой, бывает и высокой
Она бывает низкой, бывает и высокой Солнечная радиация
Солнечная радиация Тундровые почвы
Тундровые почвы Галактическая природа цикличности в истории развития Земли
Галактическая природа цикличности в истории развития Земли Физико-географическое положение Евразии
Физико-географическое положение Евразии Что такое геологический процесс?
Что такое геологический процесс? Геология полезных ископаемых. Введение. Определение понятий. Классификация. (Лекция 1)
Геология полезных ископаемых. Введение. Определение понятий. Классификация. (Лекция 1) Озеро Маныч-Гудило в Ростовской области
Озеро Маныч-Гудило в Ростовской области Путешественнику на заметку
Путешественнику на заметку Картографические проекции
Картографические проекции Ресурсні властивості літосфери. Геологічне середовище людства
Ресурсні властивості літосфери. Геологічне середовище людства Місцевий та поясний час
Місцевий та поясний час Высотная поясность
Высотная поясность Лісова політика. Лісова політика зарубіжних країн
Лісова політика. Лісова політика зарубіжних країн Гідрологія боліт
Гідрологія боліт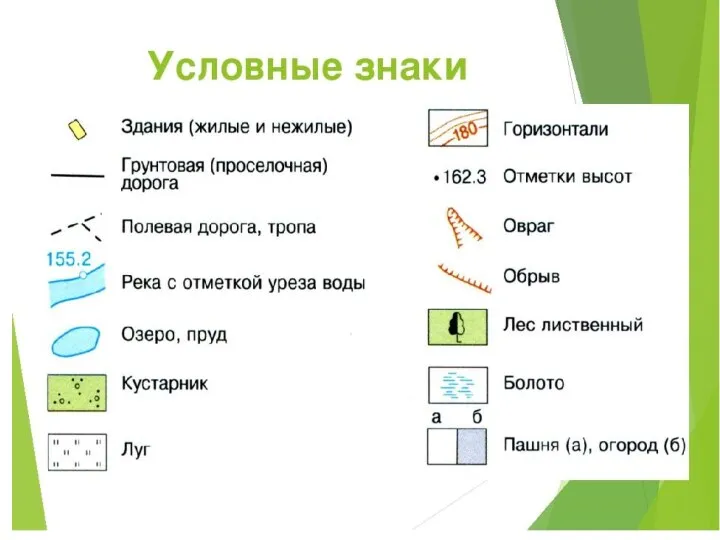 Условные знаки на карте
Условные знаки на карте Температура воздуха
Температура воздуха Внутренние воды Евразии
Внутренние воды Евразии Состав (структура) населения. Население России
Состав (структура) населения. Население России Остров Бали
Остров Бали Моя малая Родина. Город Добрянка
Моя малая Родина. Город Добрянка Фототур 5:0 в пользу Чайковского
Фототур 5:0 в пользу Чайковского Тынық мұхиты
Тынық мұхиты Первые шаги в минералогию. Свойства минералов. Часть 2
Первые шаги в минералогию. Свойства минералов. Часть 2 Геологоразведочные работы
Геологоразведочные работы Озера Татарстана
Озера Татарстана Как понять прогноз погоды
Как понять прогноз погоды