- Алгоритмы планирования процессов

Содержание
- 2. Планирование процессов включает в себя решение следующих задач: определение момента времени для смены выполняемого процесса; выбор
- 3. Рассмотрим две группы наиболее часто встречающихся алгоритмов: алгоритмы, основанные на квантовании, и алгоритмы, основанные на приоритетах.
- 4. алгоритмы, основанные на квантовании
- 5. Алгоритм, основанный на квантовании смена активного процесса происходит, если: процесс завершился и покинул систему, произошла ошибка,
- 6. Алгоритм, основанный на квантовании (2) Процесс, который исчерпал свой квант переводится в состояние ГОТОВНОСТЬ и ожидает,
- 7. .Планирование, основанное на квантовании
- 8. . Кванты, выделяемые процессам, могут быть одинаковыми для всех процессов или различными Кванты, выделяемые одному процессу,
- 9. Процессы, которые не полностью использовали выделенный им квант (например, из-за ухода на выполнение операций ввода-вывода), могут
- 10. алгоритмы, основанные на приоритетах
- 11. Приоритет процесса - это число, характеризующее степень привилегированности процесса при использовании ресурсов вычислительной машины, в частности,
- 12. Приоритет процесса Приоритет может выражаться целыми или дробными, положительным или отрицательным значением. Чем выше привилегии процесса,
- 13. Приоритет может назначаться директивно администратором системы в зависимости от важности работы или внесенной платы, либо вычисляться
- 14. Существует две разновидности приоритетных алгоритмов: алгоритмы, использующие относительные приоритеты; алгоритмы, использующие абсолютные приоритеты.
- 15. В обоих случаях выбор процесса на выполнение из очереди готовых осуществляется одинаково: выбирается процесс, имеющий наивысший
- 16. В системах с относительными приоритетами активный процесс выполняется до тех пор, пока он сам не покинет
- 17. В системах с абсолютными приоритетами выполнение активного процесса прерывается еще при одном условии: если в очереди
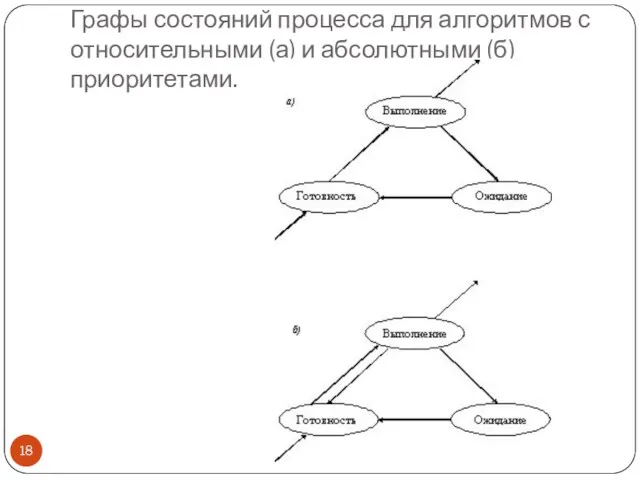
- 18. Графы состояний процесса для алгоритмов с относительными (а) и абсолютными (б) приоритетами.
- 19. Во многих операционных системах алгоритмы планирования построены с использованием как квантования, так и приоритетов. Например, в
- 20. вытесняющие (preemptive) и невытесняющие (non-preemptive). Вытесняющие и невытесняющие алгоритмы планирования
- 21. Non-preemptive multitasking невытесняющая многозадачность - это способ планирования процессов, при котором активный процесс выполняется до тех
- 22. Preemptive multitasking вытесняющая многозадачность - это такой способ, при котором решение о переключении процессора с выполнения
- 23. Основным различием между preemptive и non-preemptive вариантами многозадачности является степень централизации механизма планирования задач.
- 24. При вытесняющей многозадачности механизм планирования задач целиком сосредоточен в операционной системе, и программист пишет свое приложение,
- 25. При невытесняющей многозадачности механизм планирования распределен между системой и прикладными программами. Прикладная программа, получив управление от
- 26. Для пользователей это означает , что управление системой теряется на произвольный период времени, который определяется приложением
- 27. Поэтому разработчики приложений для non-preemptive операционной среды, возлагая на себя функции планировщика, должны создавать приложения так,
- 28. Крайним проявлением "недружественности" приложения является его зависание, которое приводит к общему краху системы. В системах с
- 29. С другой стороны, Существенным преимуществом non-preemptive систем является более высокая скорость переключения с задачи на задачу.
- 30. Почти во всех современных операционных системах, ориентированных на высокопроизводительное выполнение приложений, реализована вытесняющая многозадачность.
- 31. Краткосрочное планирование Алгоритмы планирования процессов
- 32. Долгосрочное, среднесрочное планирование Планирование заданий используется в качестве долгосрочного планирования процессов. Оно отвечает за порождение новых
- 33. Краткосрочное планирование Планирование использования процессора применяется в качестве краткосрочного планирования процессов. Оно проводится, к примеру, при
- 34. Существует достаточно большой набор разнообразных алгоритмов планирования, которые предназначены для достижения различных целей и эффективны для
- 35. Простые алгоритмы планирования FCFS (First-Come, First-Served ) RR (Round Robin) SJF (Shortest-Job-First) Гарантированное планирование Приоритетное планирование
- 36. Алгоритм планирования FCFS
- 37. First-Come, First-Served (FCFS) (первым пришел, первым обслужен). Процессы, находящиеся в состоянии готовность, выстроены в очередь. Когда
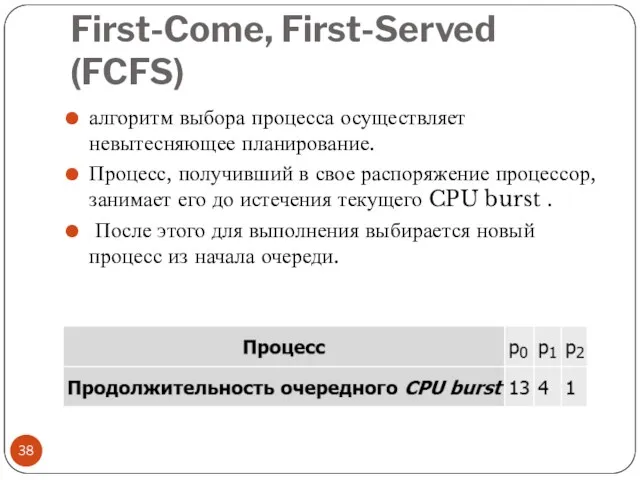
- 38. First-Come, First-Served (FCFS) алгоритм выбора процесса осуществляет невытесняющее планирование. Процесс, получивший в свое распоряжение процессор, занимает
- 39. Преимущества и недостатки Расскажите на ☺ коллоквиуме
- 40. Алгоритм RR
- 41. Round Robin (вид детской карусели в США) Модификация алгоритма FCFS или сокращенно RR. Тот же самый
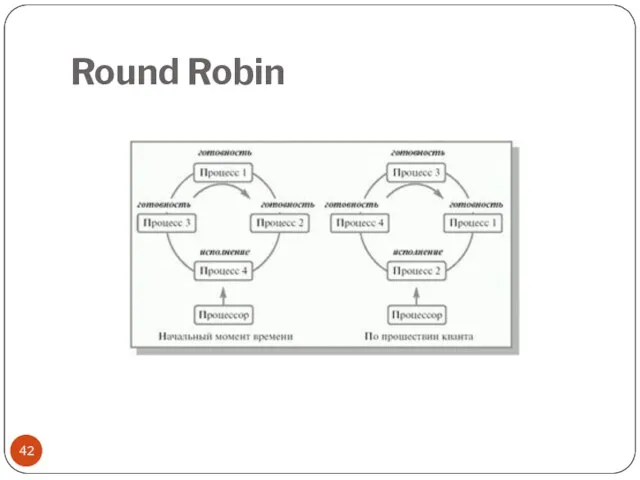
- 42. Round Robin
- 43. RR Подробный алгоритм на коллоквиуме
- 44. Алгоритм Shortest-Job-First (SJF)
- 45. Shortest-Job-First Если короткие задачи расположены в очереди ближе к ее началу, то общая производительность этих алгоритмов
- 46. Shortest-Job-First Подробный алгоритм на коллоквиуме
- 47. Гарантированное планирование
- 48. Гарантированное планирование При интерактивной работе N пользователей можно применить алгоритм, который гарантирует, что каждый из пользователей
- 49. Если то i -й пользователь несправедливо обделен процессорным временем. Если же то система явно благоволит к
- 50. К недостаткам этого алгоритма можно отнести невозможность предугадать поведение пользователей. Если некоторый пользователь отправится на пару
- 51. Приоритетное планирование
- 52. Приоритетное планирование Алгоритмы SJF и гарантированного планирования представляют собой частные случаи приоритетного планирования.
- 53. При приоритетном планировании каждому процессу присваивается определенное числовое значение – приоритет, в соответствии с которым ему
- 54. Приоритетное планирование Особенности алгоритма на коллоквиуме.
- 55. Многоуровневые очереди (Multilevel Queue)
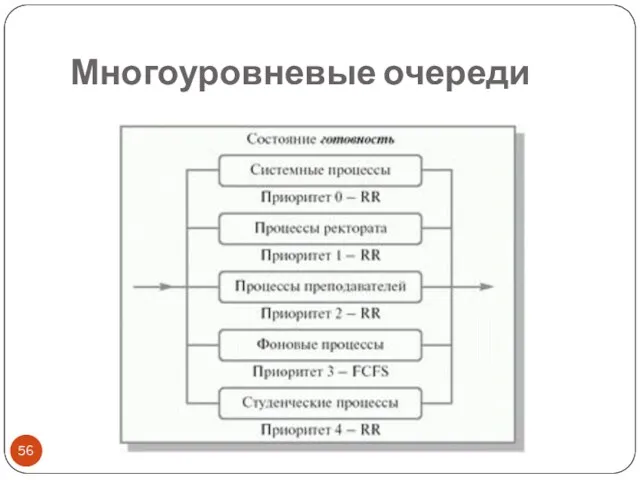
- 56. Многоуровневые очереди
- 57. Многоуровневые очереди Для систем, в которых процессы могут быть легко рассортированы по разным группам, был разработан
- 58. Многоуровневые очереди с обратной связью
- 59. Многоуровневые очереди с обратной связью
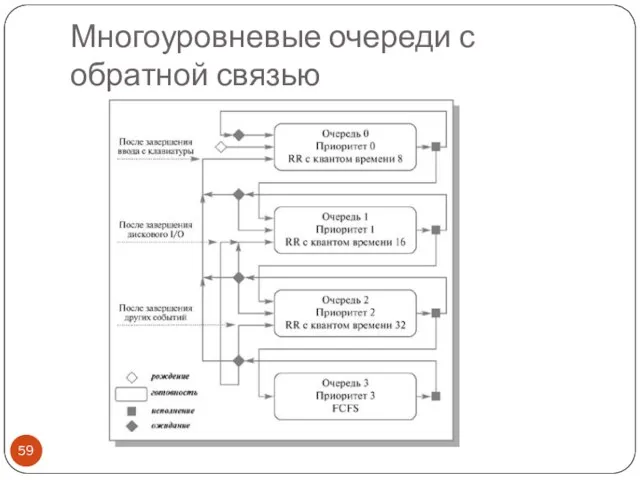
- 60. Многоуровневые очереди с обратной связью процесс не постоянно приписан к определенной очереди, а может мигрировать из
- 61. На коллоквиуме приводите по примеру каждого алгоритма с таблицами и оценками качества Регистрируйтесь и см. http://www.intuit.ru/studies/courses/2192/31/lecture/972?page=3
- 62. Критическая секция Семафоры Средства синхронизации и взаимодействия процессов
- 63. Проблема синхронизации Процессам часто нужно взаимодействовать друг с другом, например, один процесс может передавать данные другому
- 64. программа печати файлов (принт-сервер).
- 65. Эта программа печатает по очереди все файлы, имена которых последовательно в порядке поступления записывают в специальный
- 66. Предположим, что в некоторый момент процесс R решил распечатать свой файл, для этого он прочитал значение
- 67. Когда в очередной раз управление будет передано процессу R, то он, продолжая свое выполнение, в полном
- 68. Сложность проблемы синхронизации состоит в нерегулярности возникающих ситуаций: в предыдущем примере можно представить и другое развитие
- 69. Критическая секция
- 70. Критическая секция Критическая секция - это часть программы, в которой осуществляется доступ к разделяемым данным. Чтобы
- 71. Простейший способ обеспечить взаимное исключение позволить процессу, находящемуся в критической секции, запрещать все прерывания. Однако этот
- 72. Другим способом является использование блокирующих переменных. С каждым разделяемым ресурсом связывается двоичная переменная, которая принимает значение
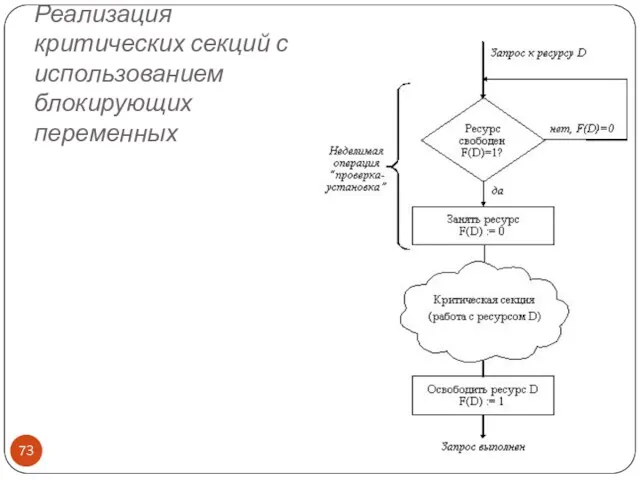
- 73. Реализация критических секций с использованием блокирующих переменных
- 74. На сл. 42 показан фрагмент алгоритма процесса, использующего для реализации взаимного исключения доступа к разделяемому ресурсу
- 75. Если все процессы написаны с использованием вышеописанных соглашений, то взаимное исключение гарантируется.
- 76. недостатки Реализация критических секций с использованием блокирующих переменных имеет существенный недостаток: в течение времени, когда один
- 77. Для устранения таких ситуаций может быть использован так называемый аппарат событий. С помощью этого средства могут
- 78. В разных операционных системах аппарат событий реализуется по своему, но в любом случае используются системные функции
- 79. Семафоры
- 80. Семафоры, кто предложил Обобщающее средство синхронизации процессов предложил Дейкстра, который ввел два новых примитива. В абстрактной
- 81. Пусть S такой семафор Операции определяются следующим образом: V(S) : переменная S увеличивается на 1 одним
- 82. Реализация критической секции с использованием системных функций WAIT(D) и POST(D)
- 83. В частном случае когда семафор S может принимать только значения 0 и 1, он превращается в
- 84. Рассмотрим примеры Взаимные блокировки
- 85. // Глобальные переменные #define N 256 int e = N, f = 0, b = 1;
- 86. Если переставить местами операции P(e) и P(b) в программе "писателе", то при некотором стечении обстоятельств эти
- 87. Пример 2
- 88. Пример 2 (см слайд 56) Пусть двум процессам, выполняющимся в режиме мультипрограммирования, для выполнения их работы
- 89. Материал см. http://v-ps.ru/it/studying/os-net/contents.htm
- 91. Скачать презентацию
Планирование процессов включает в себя решение следующих задач:
определение момента времени
Планирование процессов включает в себя решение следующих задач:
определение момента времени
Рассмотрим две группы наиболее часто встречающихся алгоритмов:
алгоритмы, основанные на квантовании, и
Рассмотрим две группы наиболее часто встречающихся алгоритмов:
алгоритмы, основанные на квантовании, и
алгоритмы, основанные на квантовании
алгоритмы, основанные на квантовании
Алгоритм, основанный на квантовании
смена активного процесса происходит, если:
процесс завершился
Алгоритм, основанный на квантовании
смена активного процесса происходит, если:
процесс завершился
Алгоритм, основанный на квантовании (2)
Процесс, который исчерпал свой квант переводится в
Алгоритм, основанный на квантовании (2)
Процесс, который исчерпал свой квант переводится в

.Планирование, основанное на квантовании
.Планирование, основанное на квантовании
. Кванты, выделяемые процессам, могут быть одинаковыми для всех процессов или
. Кванты, выделяемые процессам, могут быть одинаковыми для всех процессов или
Процессы, которые не полностью использовали выделенный им квант (например, из-за ухода
Процессы, которые не полностью использовали выделенный им квант (например, из-за ухода
алгоритмы, основанные на приоритетах
алгоритмы, основанные на приоритетах
Приоритет процесса
- это число, характеризующее степень привилегированности процесса при использовании ресурсов
Приоритет процесса
- это число, характеризующее степень привилегированности процесса при использовании ресурсов
Приоритет процесса
Приоритет может выражаться целыми или дробными, положительным или отрицательным значением.
Чем
Приоритет процесса
Приоритет может выражаться целыми или дробными, положительным или отрицательным значением.
Чем
Приоритет
может назначаться директивно администратором системы в зависимости от важности работы или
Приоритет
может назначаться директивно администратором системы в зависимости от важности работы или
Существует две разновидности приоритетных алгоритмов:
алгоритмы, использующие относительные приоритеты;
алгоритмы, использующие
Существует две разновидности приоритетных алгоритмов:
алгоритмы, использующие относительные приоритеты;
алгоритмы, использующие
В обоих случаях
выбор процесса на выполнение из очереди готовых осуществляется
В обоих случаях
выбор процесса на выполнение из очереди готовых осуществляется
В системах с относительными приоритетами
активный процесс выполняется до тех пор,
В системах с относительными приоритетами
активный процесс выполняется до тех пор,
В системах с абсолютными приоритетами
выполнение активного процесса прерывается еще при
В системах с абсолютными приоритетами
выполнение активного процесса прерывается еще при
Графы состояний процесса для алгоритмов с относительными (а) и абсолютными (б)
Графы состояний процесса для алгоритмов с относительными (а) и абсолютными (б)
Во многих операционных системах алгоритмы планирования
построены с использованием как квантования, так
Во многих операционных системах алгоритмы планирования
построены с использованием как квантования, так
вытесняющие (preemptive) и невытесняющие (non-preemptive).
Вытесняющие и невытесняющие алгоритмы планирования
вытесняющие (preemptive) и невытесняющие (non-preemptive).
Вытесняющие и невытесняющие алгоритмы планирования
Non-preemptive multitasking
невытесняющая многозадачность - это способ планирования процессов, при котором
Non-preemptive multitasking
невытесняющая многозадачность - это способ планирования процессов, при котором
Preemptive multitasking
вытесняющая многозадачность - это такой способ, при котором
Preemptive multitasking
вытесняющая многозадачность - это такой способ, при котором
Основным различием
между preemptive и non-preemptive вариантами многозадачности является степень централизации
Основным различием
между preemptive и non-preemptive вариантами многозадачности является степень централизации
При вытесняющей многозадачности механизм планирования задач целиком сосредоточен в операционной системе,
При вытесняющей многозадачности механизм планирования задач целиком сосредоточен в операционной системе,
При невытесняющей многозадачности механизм планирования распределен между системой и прикладными программами.
Прикладная
При невытесняющей многозадачности механизм планирования распределен между системой и прикладными программами.
Прикладная
Для пользователей это означает
, что управление системой теряется на произвольный период
Для пользователей это означает
, что управление системой теряется на произвольный период
Поэтому разработчики приложений для non-preemptive операционной среды, возлагая на себя функции
Поэтому разработчики приложений для non-preemptive операционной среды, возлагая на себя функции
Крайним проявлением "недружественности" приложения является его зависание, которое приводит к общему
Крайним проявлением "недружественности" приложения является его зависание, которое приводит к общему
С другой стороны, Существенным преимуществом non-preemptive систем является более высокая скорость
С другой стороны, Существенным преимуществом non-preemptive систем является более высокая скорость
Почти во всех современных операционных системах, ориентированных на высокопроизводительное выполнение приложений,
Почти во всех современных операционных системах, ориентированных на высокопроизводительное выполнение приложений,
Краткосрочное планирование
Алгоритмы планирования процессов
Краткосрочное планирование
Алгоритмы планирования процессов
Долгосрочное, среднесрочное планирование
Планирование заданий используется в качестве долгосрочного планирования процессов. Оно
Долгосрочное, среднесрочное планирование
Планирование заданий используется в качестве долгосрочного планирования процессов. Оно
Краткосрочное планирование
Планирование использования процессора применяется в качестве краткосрочного планирования процессов.
Оно
Краткосрочное планирование
Планирование использования процессора применяется в качестве краткосрочного планирования процессов.
Оно
Существует достаточно большой набор разнообразных алгоритмов планирования, которые предназначены для достижения
Существует достаточно большой набор разнообразных алгоритмов планирования, которые предназначены для достижения
Простые алгоритмы планирования
FCFS (First-Come, First-Served )
RR (Round Robin)
SJF (Shortest-Job-First)
Гарантированное планирование
Приоритетное планирование
Многоуровневые
Простые алгоритмы планирования
FCFS (First-Come, First-Served )
RR (Round Robin)
SJF (Shortest-Job-First)
Гарантированное планирование
Приоритетное планирование
Многоуровневые
Алгоритм планирования FCFS
Алгоритм планирования FCFS
First-Come, First-Served (FCFS)
(первым пришел, первым обслужен).
Процессы, находящиеся в состоянии готовность,
First-Come, First-Served (FCFS)
(первым пришел, первым обслужен).
Процессы, находящиеся в состоянии готовность,
First-Come, First-Served (FCFS)
алгоритм выбора процесса осуществляет невытесняющее планирование.
Процесс, получивший в
First-Come, First-Served (FCFS)
алгоритм выбора процесса осуществляет невытесняющее планирование.
Процесс, получивший в
Преимущества и недостатки
Расскажите на ☺ коллоквиуме
Преимущества и недостатки
Расскажите на ☺ коллоквиуме
Алгоритм RR
Алгоритм RR
Round Robin (вид детской карусели в США)
Модификация алгоритма FCFS или сокращенно
Round Robin (вид детской карусели в США)
Модификация алгоритма FCFS или сокращенно
Round Robin
Round Robin
RR
Подробный алгоритм на коллоквиуме
RR
Подробный алгоритм на коллоквиуме

Алгоритм Shortest-Job-First (SJF)
Алгоритм Shortest-Job-First (SJF)
Shortest-Job-First
Если короткие задачи расположены в очереди ближе к ее началу, то
Shortest-Job-First
Если короткие задачи расположены в очереди ближе к ее началу, то
Shortest-Job-First
Подробный алгоритм на коллоквиуме
Shortest-Job-First
Подробный алгоритм на коллоквиуме
Гарантированное планирование
Гарантированное планирование
Гарантированное планирование
При интерактивной работе N пользователей можно применить алгоритм, который гарантирует,
Гарантированное планирование
При интерактивной работе N пользователей можно применить алгоритм, который гарантирует,
Если
то i -й пользователь несправедливо обделен процессорным временем.
Если же
то система
Если
то i -й пользователь несправедливо обделен процессорным временем.
Если же
то система
К недостаткам этого алгоритма можно отнести невозможность предугадать поведение пользователей.
Если
К недостаткам этого алгоритма можно отнести невозможность предугадать поведение пользователей.
Если
Приоритетное планирование
Приоритетное планирование
Приоритетное планирование
Алгоритмы SJF и гарантированного планирования представляют собой частные случаи приоритетного
Приоритетное планирование
Алгоритмы SJF и гарантированного планирования представляют собой частные случаи приоритетного
При приоритетном планировании
каждому процессу присваивается определенное числовое значение – приоритет,
При приоритетном планировании
каждому процессу присваивается определенное числовое значение – приоритет,
Приоритетное планирование
Особенности алгоритма на коллоквиуме.
Приоритетное планирование
Особенности алгоритма на коллоквиуме.
Многоуровневые очереди (Multilevel Queue)
Многоуровневые очереди (Multilevel Queue)
Многоуровневые очереди
Многоуровневые очереди
Многоуровневые очереди
Для систем, в которых процессы могут быть легко рассортированы по
Многоуровневые очереди
Для систем, в которых процессы могут быть легко рассортированы по
Многоуровневые очереди с обратной связью
Многоуровневые очереди с обратной связью
Многоуровневые очереди с обратной связью
Многоуровневые очереди с обратной связью
Многоуровневые очереди с обратной связью
процесс не постоянно приписан к определенной очереди,
Многоуровневые очереди с обратной связью
процесс не постоянно приписан к определенной очереди,
На коллоквиуме приводите по примеру каждого алгоритма с таблицами и оценками
На коллоквиуме приводите по примеру каждого алгоритма с таблицами и оценками
Критическая секция
Семафоры
Средства синхронизации и взаимодействия процессов
Семафоры
Средства синхронизации и взаимодействия процессов
Проблема синхронизации
Процессам часто нужно взаимодействовать друг с другом, например, один
Проблема синхронизации
Процессам часто нужно взаимодействовать друг с другом, например, один

программа печати файлов (принт-сервер).
программа печати файлов (принт-сервер).
Эта программа печатает по очереди все файлы, имена которых последовательно в
Эта программа печатает по очереди все файлы, имена которых последовательно в
Предположим, что в некоторый момент процесс R решил распечатать свой файл,
Предположим, что в некоторый момент процесс R решил распечатать свой файл,
Когда в очередной раз управление будет передано процессу R, то он,
Когда в очередной раз управление будет передано процессу R, то он,
Сложность проблемы синхронизации состоит в нерегулярности возникающих ситуаций:
в предыдущем примере
Сложность проблемы синхронизации состоит в нерегулярности возникающих ситуаций:
в предыдущем примере
Критическая секция
Критическая секция
Критическая секция
Критическая секция - это часть программы, в которой осуществляется
Критическая секция
Критическая секция - это часть программы, в которой осуществляется
Простейший способ обеспечить взаимное исключение
позволить процессу, находящемуся в критической секции,
Простейший способ обеспечить взаимное исключение
позволить процессу, находящемуся в критической секции,
Другим способом
является использование блокирующих переменных. С каждым разделяемым ресурсом связывается
Другим способом
является использование блокирующих переменных. С каждым разделяемым ресурсом связывается
Реализация критических секций с использованием блокирующих переменных
Реализация критических секций с использованием блокирующих переменных
На сл. 42 показан
фрагмент алгоритма процесса,
использующего для реализации взаимного исключения доступа
На сл. 42 показан
фрагмент алгоритма процесса,
использующего для реализации взаимного исключения доступа
Если все процессы написаны с использованием вышеописанных соглашений, то взаимное исключение
Если все процессы написаны с использованием вышеописанных соглашений, то взаимное исключение
недостатки
Реализация критических секций с использованием блокирующих переменных имеет существенный недостаток:
в
недостатки
Реализация критических секций с использованием блокирующих переменных имеет существенный недостаток:
в
Для устранения таких ситуаций
может быть использован так называемый аппарат событий.
Для устранения таких ситуаций
может быть использован так называемый аппарат событий.
В разных операционных системах аппарат событий
реализуется по своему, но в
В разных операционных системах аппарат событий
реализуется по своему, но в
Семафоры
Семафоры
Семафоры, кто предложил
Обобщающее средство синхронизации процессов предложил Дейкстра, который ввел два
Семафоры, кто предложил
Обобщающее средство синхронизации процессов предложил Дейкстра, который ввел два
Пусть S такой семафор
Операции определяются следующим образом:
V(S) : переменная S
Пусть S такой семафор
Операции определяются следующим образом:
V(S) : переменная S
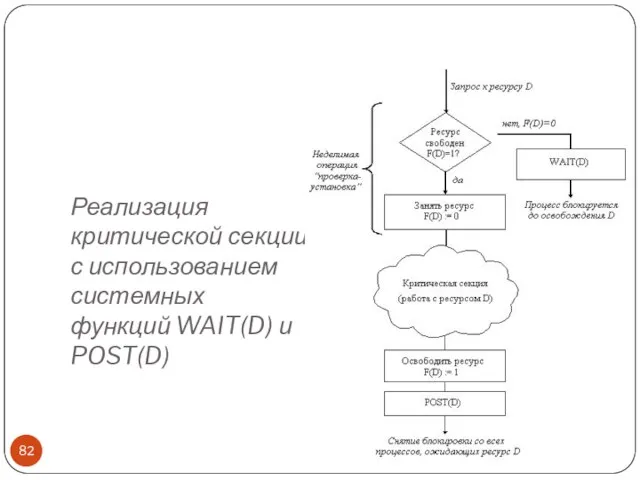
Реализация критической секции с использованием системных
функций WAIT(D) и POST(D)
Реализация критической секции с использованием системных
функций WAIT(D) и POST(D)
В частном случае
когда семафор S может принимать только значения 0 и
В частном случае
когда семафор S может принимать только значения 0 и
Рассмотрим примеры
Взаимные блокировки
Рассмотрим примеры
Взаимные блокировки

// Глобальные переменные
#define N 256
int e = N, f = 0,
// Глобальные переменные
#define N 256
int e = N, f = 0,
Если переставить местами операции P(e) и P(b) в программе "писателе", то
Если переставить местами операции P(e) и P(b) в программе "писателе", то

Пример 2
Пример 2
Пример 2 (см слайд 56)
Пусть двум процессам, выполняющимся в режиме мультипрограммирования,
Пример 2 (см слайд 56)
Пусть двум процессам, выполняющимся в режиме мультипрограммирования,
Материал см. http://v-ps.ru/it/studying/os-net/contents.htm
Материал см. http://v-ps.ru/it/studying/os-net/contents.htm
 Строки. Функции и процедуры для работы со строками
Строки. Функции и процедуры для работы со строками Урок информатики в 5 классе по теме Кодирование информации
Урок информатики в 5 классе по теме Кодирование информации Бездротові мережі
Бездротові мережі Коммутаторы и концентраторы. Аппаратура компьютерных сетей
Коммутаторы и концентраторы. Аппаратура компьютерных сетей Текстовые документы и технологии их создания. Обработка текстовой информации. Информатика. 7 класс
Текстовые документы и технологии их создания. Обработка текстовой информации. Информатика. 7 класс Zscaler ZPA App Installation
Zscaler ZPA App Installation Мультиплексирование данных в стандарте MPEG-2
Мультиплексирование данных в стандарте MPEG-2 Обработка текстовой информации
Обработка текстовой информации Урок по информатике на тему: Числовая информация 10 класс
Урок по информатике на тему: Числовая информация 10 класс Дизайн компьютерных игр и анимационных фильмов с точки зрения их визуального воздействия на человека
Дизайн компьютерных игр и анимационных фильмов с точки зрения их визуального воздействия на человека Основные этапы решения задач на ЭВМ. Критерии качества программ
Основные этапы решения задач на ЭВМ. Критерии качества программ Модель. Классификация моделей
Модель. Классификация моделей Информация и информационные процессы
Информация и информационные процессы Программирование (C++)
Программирование (C++) Что такое веб-разработка
Что такое веб-разработка Информационные технологии. Введение. Отрасль информационных технологий
Информационные технологии. Введение. Отрасль информационных технологий Измерение информации. Решение задач. 7 класс
Измерение информации. Решение задач. 7 класс Кіріспе сабақ.Информатика кабинетіндегі қауіпсіздік техникасының ережелері
Кіріспе сабақ.Информатика кабинетіндегі қауіпсіздік техникасының ережелері Тест по правилам техники безопасности при работе в кабинете информатики.
Тест по правилам техники безопасности при работе в кабинете информатики. Microsoft office excel
Microsoft office excel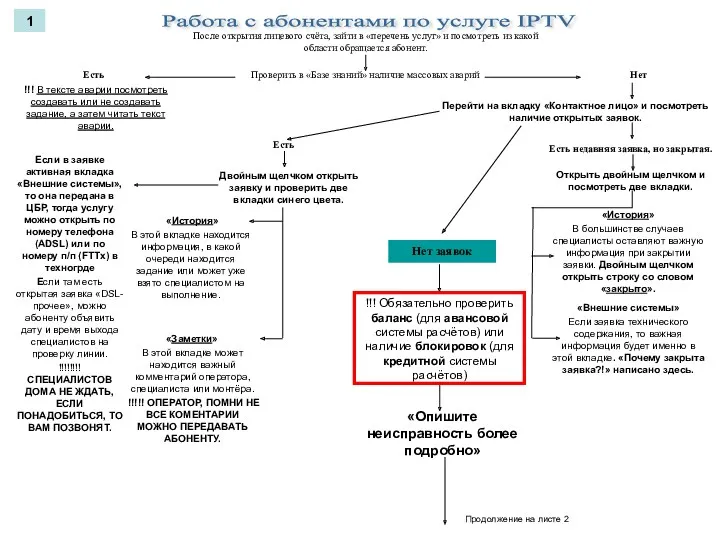 Алгоритм работы с IPTV
Алгоритм работы с IPTV ИОС различных уровней
ИОС различных уровней Комп'ютерна програма Applet
Комп'ютерна програма Applet Компьютерная этика
Компьютерная этика Виды массивов
Виды массивов Электронно-библиотечная система Национальный цифровой ресурс РУКОНТ. Руководство пользователя
Электронно-библиотечная система Национальный цифровой ресурс РУКОНТ. Руководство пользователя Социальные сети и их возможности
Социальные сети и их возможности Інноваційні рішення в галузі побутової техніки на прикладі 3D принтера
Інноваційні рішення в галузі побутової техніки на прикладі 3D принтера