- Езда по черной линии с одним датчиком освещенности

Содержание
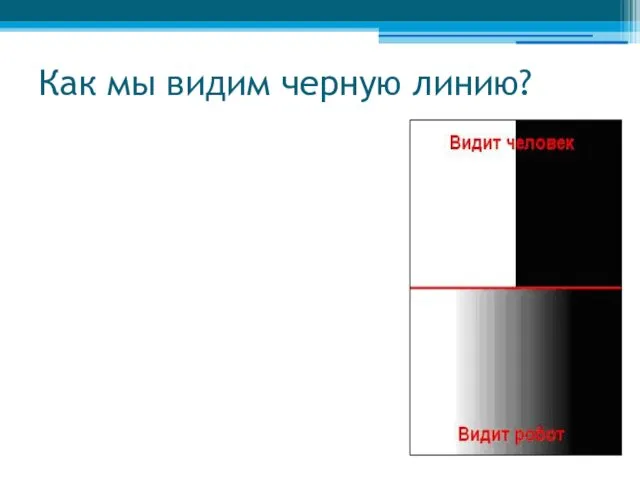
- 2. Как мы видим черную линию?
- 3. Каков алгоритм движения робота? Повторяй бесконечно: Плавный поворот направо до черного Плавный поворот налево до белого
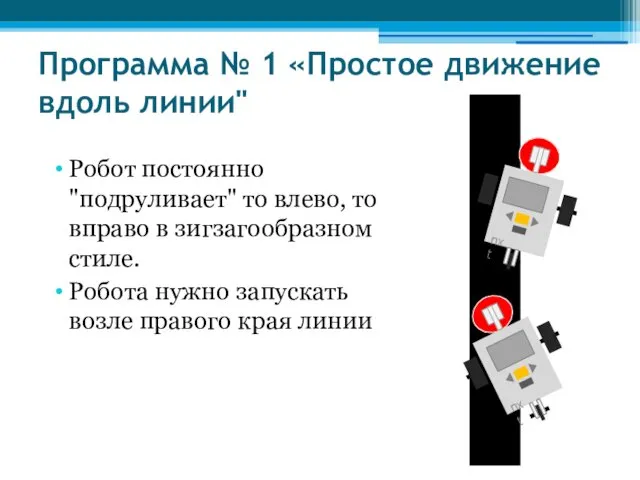
- 4. Программа № 1 «Простое движение вдоль линии" Робот постоянно "подруливает" то влево, то вправо в зигзагообразном
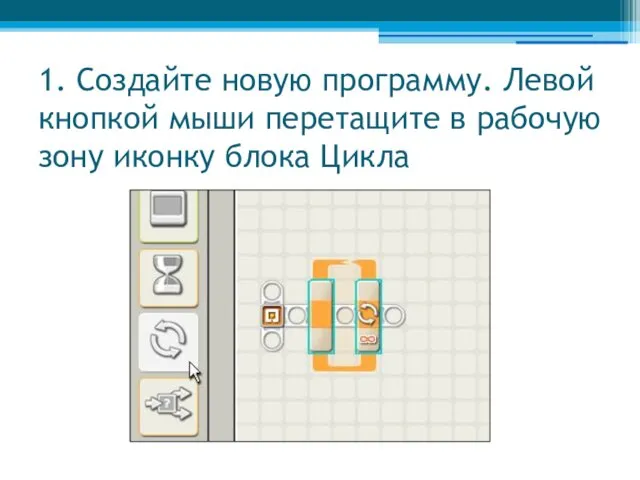
- 5. 1. Создайте новую программу. Левой кнопкой мыши перетащите в рабочую зону иконку блока Цикла
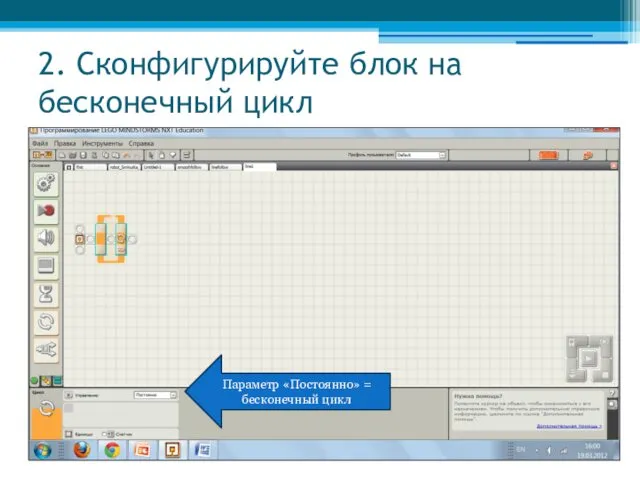
- 6. 2. Сконфигурируйте блок на бесконечный цикл Параметр «Постоянно» = бесконечный цикл
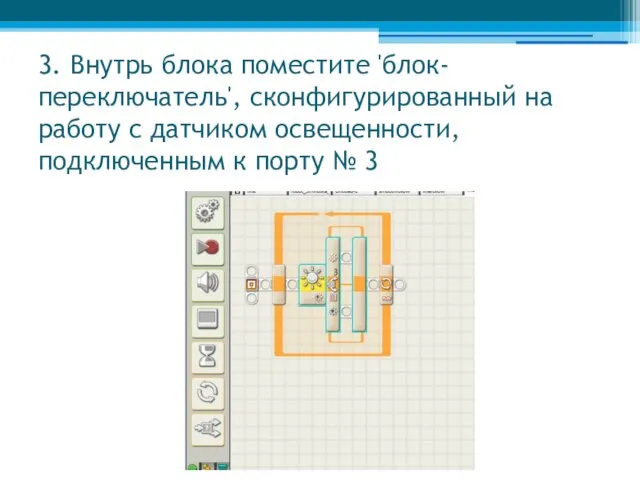
- 7. 3. Внутрь блока поместите 'блок-переключатель', сконфигурированный на работу с датчиком освещенности, подключенным к порту № 3
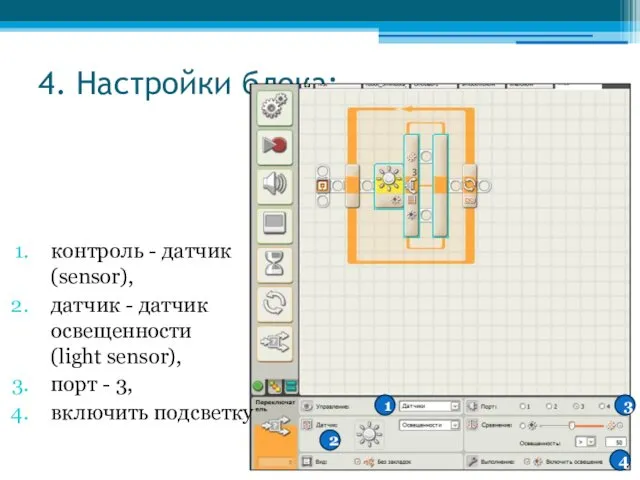
- 8. 4. Настройки блока: контроль - датчик (sensor), датчик - датчик освещенности (light sensor), порт - 3,
- 9. 5. Измеряем значение освещенности на черной линии Установить робот на линию так, чтобы датчик освещенности находился
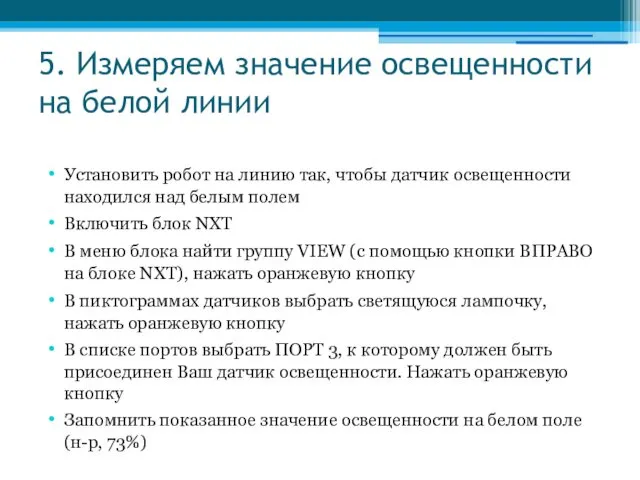
- 10. 5. Измеряем значение освещенности на белой линии Установить робот на линию так, чтобы датчик освещенности находился
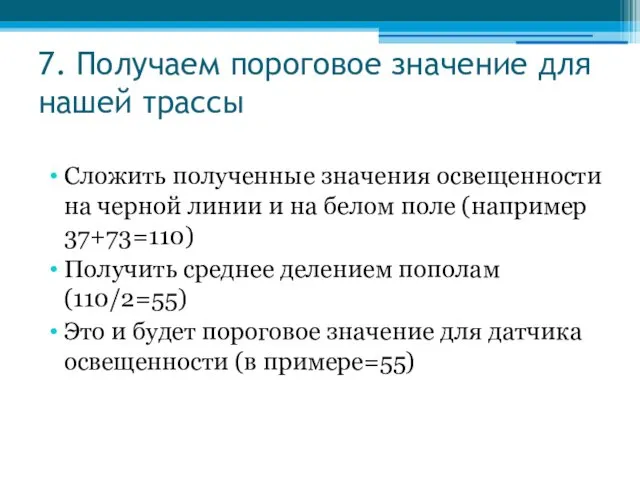
- 11. 7. Получаем пороговое значение для нашей трассы Сложить полученные значения освещенности на черной линии и на
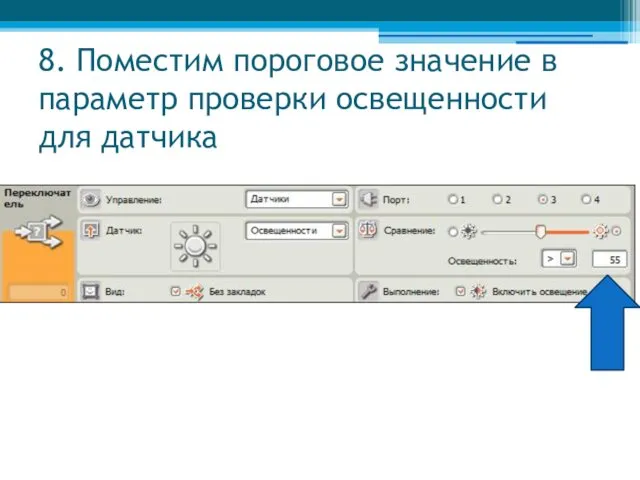
- 12. 8. Поместим пороговое значение в параметр проверки освещенности для датчика
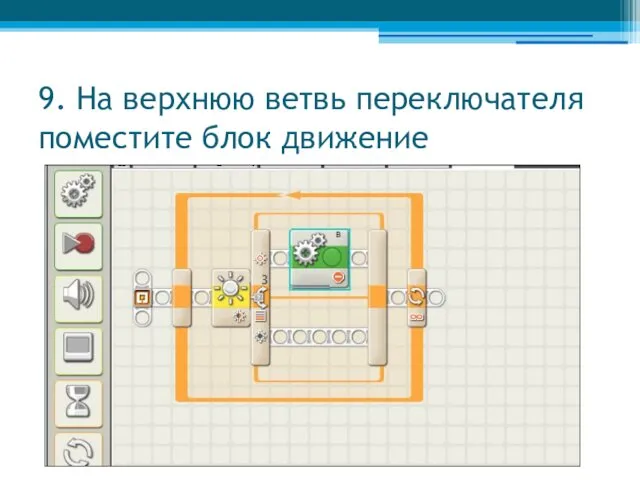
- 13. 9. На верхнюю ветвь переключателя поместите блок движение
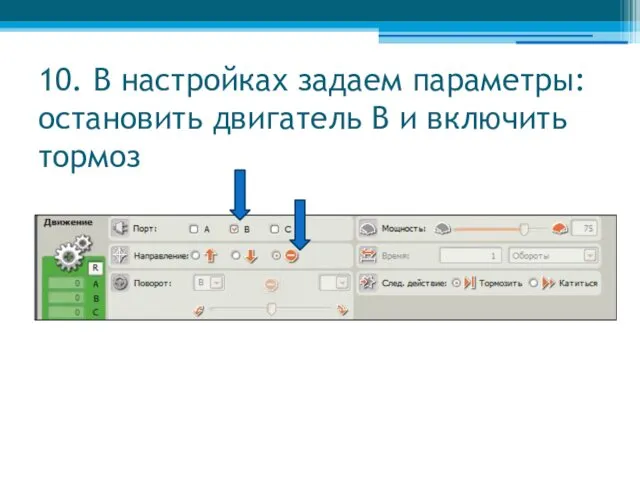
- 14. 10. В настройках задаем параметры: остановить двигатель B и включить тормоз
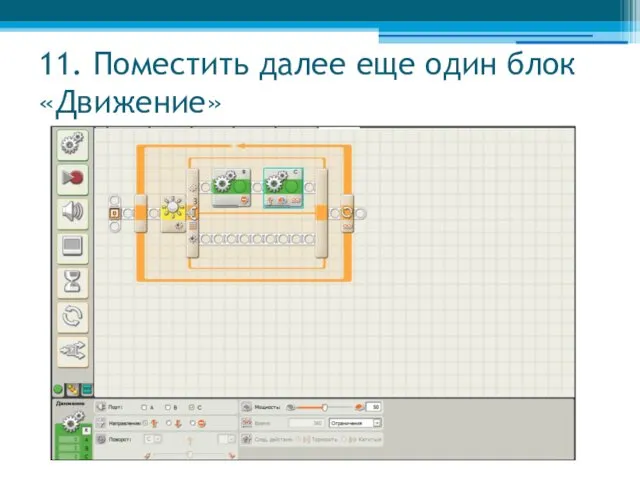
- 15. 11. Поместить далее еще один блок «Движение»
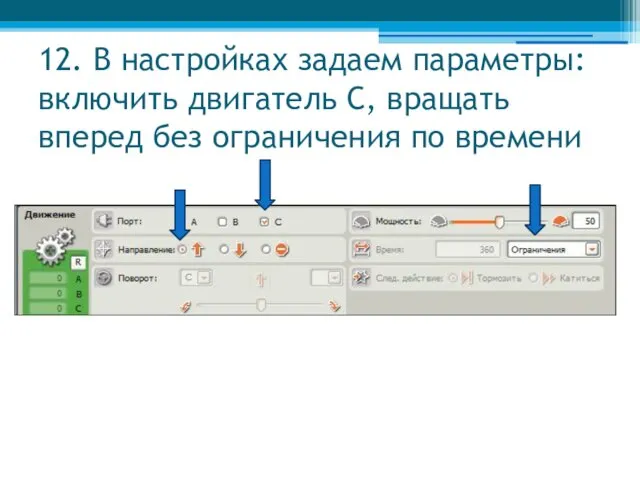
- 16. 12. В настройках задаем параметры: включить двигатель С, вращать вперед без ограничения по времени
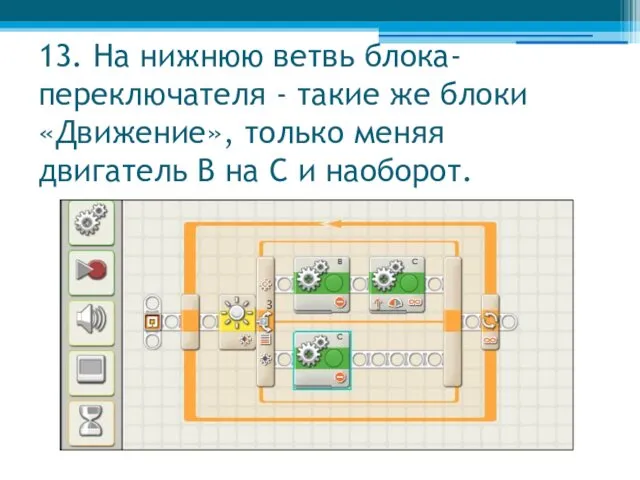
- 17. 13. На нижнюю ветвь блока-переключателя - такие же блоки «Движение», только меняя двигатель B на C
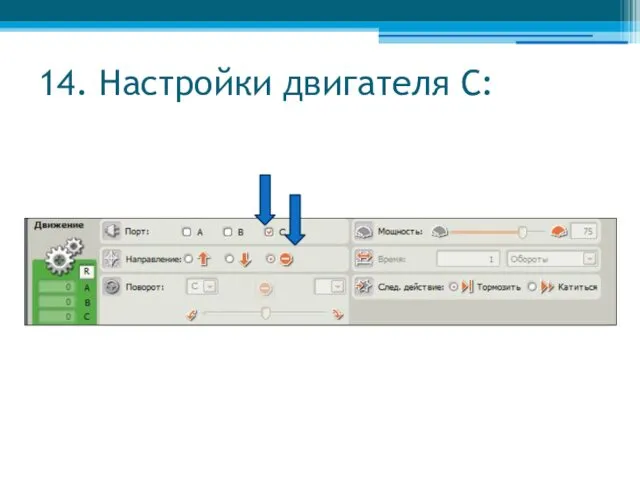
- 18. 14. Настройки двигателя С:
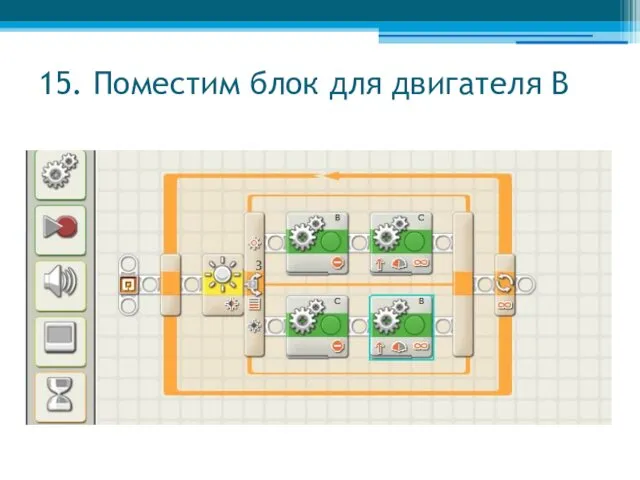
- 19. 15. Поместим блок для двигателя В
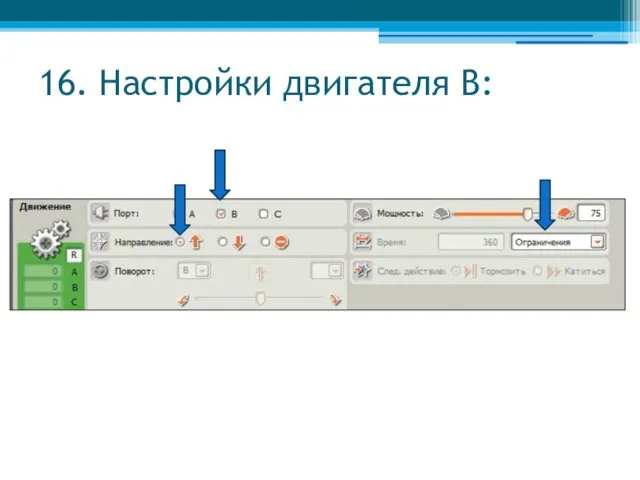
- 20. 16. Настройки двигателя В:
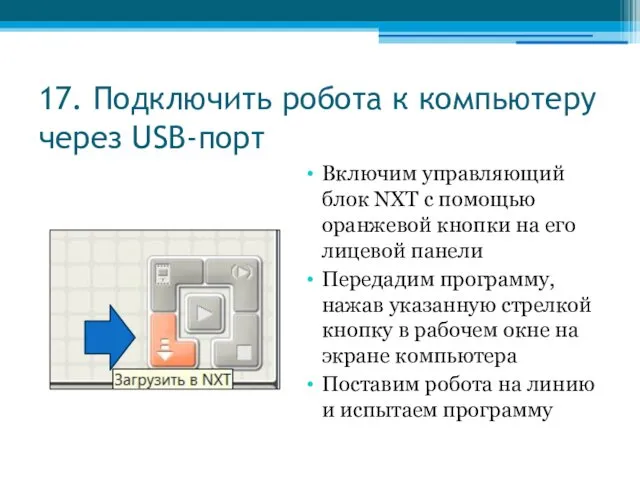
- 21. 17. Подключить робота к компьютеру через USB-порт Включим управляющий блок NXT с помощью оранжевой кнопки на
- 23. Скачать презентацию
Как мы видим черную линию?
Как мы видим черную линию?
Каков алгоритм движения робота?
Повторяй бесконечно:
Плавный поворот направо до черного
Плавный поворот налево до белого
Каков алгоритм движения робота?
Повторяй бесконечно:
Плавный поворот направо до черного
Плавный поворот налево до белого
Программа № 1 «Простое движение вдоль линии"
Робот постоянно "подруливает" то влево, то вправо
Программа № 1 «Простое движение вдоль линии"
Робот постоянно "подруливает" то влево, то вправо
1. Создайте новую программу. Левой кнопкой мыши перетащите в рабочую зону иконку блока Цикла
1. Создайте новую программу. Левой кнопкой мыши перетащите в рабочую зону иконку блока Цикла
2. Сконфигурируйте блок на бесконечный цикл
Параметр «Постоянно» = бесконечный цикл
2. Сконфигурируйте блок на бесконечный цикл
Параметр «Постоянно» = бесконечный цикл
3. Внутрь блока поместите 'блок-переключатель', сконфигурированный на работу с датчиком освещенности, подключенным к
3. Внутрь блока поместите 'блок-переключатель', сконфигурированный на работу с датчиком освещенности, подключенным к
4. Настройки блока:
контроль - датчик (sensor),
датчик - датчик освещенности (light sensor),
порт
4. Настройки блока:
контроль - датчик (sensor),
датчик - датчик освещенности (light sensor),
порт
5. Измеряем значение освещенности на черной линии
Установить робот на линию так, чтобы датчик
5. Измеряем значение освещенности на черной линии
Установить робот на линию так, чтобы датчик
5. Измеряем значение освещенности на белой линии
Установить робот на линию так, чтобы датчик
5. Измеряем значение освещенности на белой линии
Установить робот на линию так, чтобы датчик
7. Получаем пороговое значение для нашей трассы
Сложить полученные значения освещенности на черной
7. Получаем пороговое значение для нашей трассы
Сложить полученные значения освещенности на черной
8. Поместим пороговое значение в параметр проверки освещенности для датчика
8. Поместим пороговое значение в параметр проверки освещенности для датчика
9. На верхнюю ветвь переключателя поместите блок движение
9. На верхнюю ветвь переключателя поместите блок движение
10. В настройках задаем параметры: остановить двигатель B и включить тормоз
10. В настройках задаем параметры: остановить двигатель B и включить тормоз
11. Поместить далее еще один блок «Движение»
11. Поместить далее еще один блок «Движение»
12. В настройках задаем параметры: включить двигатель С, вращать вперед без ограничения по
12. В настройках задаем параметры: включить двигатель С, вращать вперед без ограничения по
13. На нижнюю ветвь блока-переключателя - такие же блоки «Движение», только меняя двигатель
13. На нижнюю ветвь блока-переключателя - такие же блоки «Движение», только меняя двигатель
14. Настройки двигателя С:
14. Настройки двигателя С:
15. Поместим блок для двигателя В
15. Поместим блок для двигателя В
16. Настройки двигателя В:
16. Настройки двигателя В:
17. Подключить робота к компьютеру через USB-порт
Включим управляющий блок NXT с помощью оранжевой
17. Подключить робота к компьютеру через USB-порт
Включим управляющий блок NXT с помощью оранжевой
 Разработка Телеграм-бота для предприятия ООО “Элегия”
Разработка Телеграм-бота для предприятия ООО “Элегия” Презентация Файловые архивы
Презентация Файловые архивы Решение систем логических уравнений
Решение систем логических уравнений Японский институт международных отношений
Японский институт международных отношений Презентация Эволюция лирического героя в творчестве А.Блока
Презентация Эволюция лирического героя в творчестве А.Блока Компьютерные и информационные технологии в науке и производстве
Компьютерные и информационные технологии в науке и производстве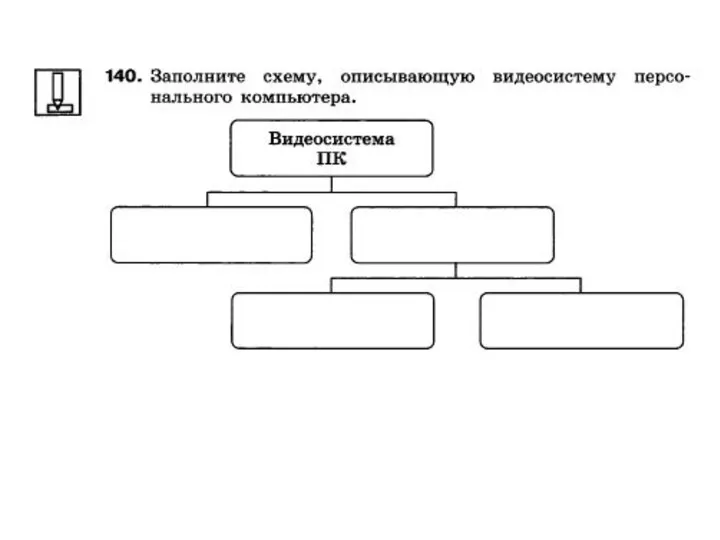 Задачи на графические изображения
Задачи на графические изображения Мастерская Третье измерение. Наноград, Сочи 2017. Симуляция. День 6
Мастерская Третье измерение. Наноград, Сочи 2017. Симуляция. День 6 Теория реляционных баз данных
Теория реляционных баз данных Интернет жүйесіндегі тілдік қарым-қатынас мәдениеті
Интернет жүйесіндегі тілдік қарым-қатынас мәдениеті Операциялық жүйе
Операциялық жүйе Организация интернет-СМИ
Организация интернет-СМИ Стандартные локальные сети. Сверхвысокоскоростные сети
Стандартные локальные сети. Сверхвысокоскоростные сети Базы данных и SQL. Семинар 2
Базы данных и SQL. Семинар 2 Competent and professional design of the model of the future instructor of foreign languages
Competent and professional design of the model of the future instructor of foreign languages Свойства объектов
Свойства объектов Visual Basic
Visual Basic Знакозмінні ряди. Ознака Лейбніца
Знакозмінні ряди. Ознака Лейбніца Внешняя, долговременная память
Внешняя, долговременная память Принципы обработки информации компьютером. Арифметические и логические основы работы компьютера
Принципы обработки информации компьютером. Арифметические и логические основы работы компьютера Digital Signal Processing
Digital Signal Processing Информация, ее свойства. Информация и управление
Информация, ее свойства. Информация и управление Основы реляционной алгебры
Основы реляционной алгебры Интеграция научного знания на пути решения глобальных проблем
Интеграция научного знания на пути решения глобальных проблем СММП: вбудовані системи
СММП: вбудовані системи Разработка мобильного приложения к чемпионату мира по футболу 2018
Разработка мобильного приложения к чемпионату мира по футболу 2018 Триггер. D-триггер. Программирование в Lab View и в Multisim
Триггер. D-триггер. Программирование в Lab View и в Multisim Microsoft Azure бұлты
Microsoft Azure бұлты