- Нейронная сеть для автономного марсохода

Содержание
- 2. Введение Беларусь принимает активное участие в космических программах, например в настоящее время в стадии реализации находится
- 3. Цели работы Мы ставим задачу, разработать софт для автоматизации работы исследовательского марсохода в условиях отсутствия внешнего
- 4. Задачи Составить алгоритм работы. Выбрать метод реализации алгоритма. Написать исходный код программного обеспечения. Тестирование программы. Выводы.
- 5. Гипотеза Рассмотрим гипотетическую ситуацию в которой марсоход оказался без связи и должен продолжать выполнять исследовательские задачи.
- 6. Почему именно ИНС? Почему именно ИНС? Марсоход должен принимать решение в самых неожиданных ситуациях, которые не
- 7. Что такое Искусственная Нейронная Сеть? Искусственные нейронные сети — математическая модель, а также её программное или
- 8. Обучение нейронных сетей Нейронные сети не программируются в привычном смысле этого слова, они обучаются. Возможность обучения
- 9. Вот собственно обучение нашей нейронной сети
- 10. Персептрон Персептрон -математическая и компьютерная модель восприятия информации мозгом, предложенная Фрэнком Розенблаттом в 1957 году.
- 11. Практическая работа
- 12. Алгоритм работы с нейронной сетью Создание нейронной сети с заданными параметрами. Обучение нейронной сети. Сохранение обученной
- 13. При создании нейронной сети требуется задать следующие параметры: Количество входных, выходных нейронов. Количество скрытых слоёв ,
- 14. Тренировка ИНС Для обучения мы создали специальный файл, в котором написали параметры, соответствующие различным ситуациям и
- 15. Результаты Мы подобрали нужный алгоритм и добились неплохих результатов. Окончательная версия сети имела следующие параметры: Количество
- 16. Результаты тестирования сетей с различными параметрами и алгоритмами FANN_TRAIN_BATCH FANN_TRAIN_INCREMENTAL FANN_TRAIN_QUICKPROP
- 17. Дальнейшие перспективы Следующим нашим шагом является написание пользовательского интерфейса для оперативного ввода данных и немедленной обработкой
- 19. Скачать презентацию
Введение
Беларусь принимает активное участие в космических программах, например в настоящее время
Введение
Беларусь принимает активное участие в космических программах, например в настоящее время
Цели работы
Мы ставим задачу, разработать софт для автоматизации работы исследовательского марсохода
Цели работы
Мы ставим задачу, разработать софт для автоматизации работы исследовательского марсохода
Задачи
Составить алгоритм работы.
Выбрать метод реализации алгоритма.
Написать исходный код программного обеспечения.
Тестирование программы.
Выводы.
Дальнейшие
Задачи
Составить алгоритм работы.
Выбрать метод реализации алгоритма.
Написать исходный код программного обеспечения.
Тестирование программы.
Выводы.
Дальнейшие
Гипотеза
Рассмотрим гипотетическую ситуацию в которой марсоход оказался без связи и
Гипотеза
Рассмотрим гипотетическую ситуацию в которой марсоход оказался без связи и
Почему именно ИНС?
Почему именно ИНС? Марсоход должен принимать решение в
Почему именно ИНС?
Почему именно ИНС? Марсоход должен принимать решение в
Что такое Искусственная Нейронная Сеть?
Искусственные нейронные сети — математическая модель,
Что такое Искусственная Нейронная Сеть?
Искусственные нейронные сети — математическая модель,
Обучение нейронных сетей
Нейронные сети не программируются в привычном смысле этого
Обучение нейронных сетей
Нейронные сети не программируются в привычном смысле этого
Вот собственно обучение нашей нейронной сети
Вот собственно обучение нашей нейронной сети
Персептрон
Персептрон -математическая и компьютерная модель восприятия информации мозгом, предложенная Фрэнком
Персептрон
Персептрон -математическая и компьютерная модель восприятия информации мозгом, предложенная Фрэнком
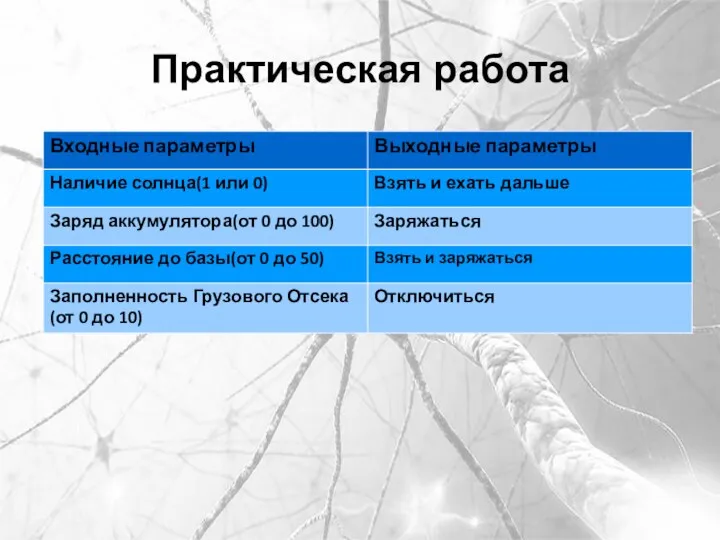
Практическая работа
Практическая работа
Алгоритм работы с нейронной сетью
Создание нейронной сети с заданными параметрами.
Алгоритм работы с нейронной сетью
Создание нейронной сети с заданными параметрами.
При создании нейронной сети требуется задать следующие параметры:
Количество входных, выходных
При создании нейронной сети требуется задать следующие параметры:
Количество входных, выходных
Тренировка ИНС
Для обучения мы создали специальный файл, в котором написали
Тренировка ИНС
Для обучения мы создали специальный файл, в котором написали
Результаты
Мы подобрали нужный алгоритм и добились неплохих результатов. Окончательная версия сети
Результаты
Мы подобрали нужный алгоритм и добились неплохих результатов. Окончательная версия сети
Результаты тестирования сетей с различными параметрами и алгоритмами
FANN_TRAIN_BATCH
FANN_TRAIN_INCREMENTAL
FANN_TRAIN_QUICKPROP
Результаты тестирования сетей с различными параметрами и алгоритмами
FANN_TRAIN_BATCH
FANN_TRAIN_INCREMENTAL
FANN_TRAIN_QUICKPROP
Дальнейшие перспективы
Следующим нашим шагом является написание пользовательского интерфейса для оперативного ввода
Дальнейшие перспективы
Следующим нашим шагом является написание пользовательского интерфейса для оперативного ввода
 Компьютерные сети, интернет и мультимедиа технологии
Компьютерные сети, интернет и мультимедиа технологии Алгоритмы обработки текстовых данных
Алгоритмы обработки текстовых данных Хранение и обработка информации в базах данных
Хранение и обработка информации в базах данных Программирование на языке Python. Базовый уровень
Программирование на языке Python. Базовый уровень Усадьба Прекрасные зори
Усадьба Прекрасные зори Графические возможности языка Visual Basic
Графические возможности языка Visual Basic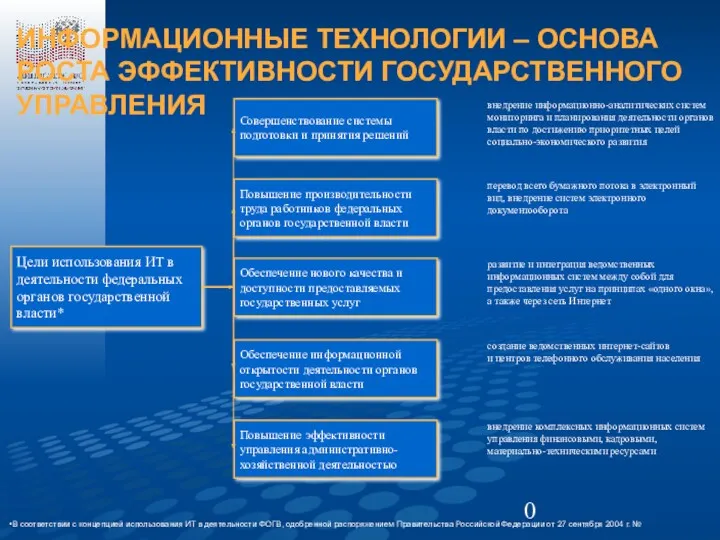 Информационные технологии – основа роста эффективности государственного управления
Информационные технологии – основа роста эффективности государственного управления Вёрстка и дизайн газетной статьи
Вёрстка и дизайн газетной статьи класс. 04.02.22
класс. 04.02.22 Операційні системи. Керування введенням-виведенням в ОС Linux, UNIX, Windows. (Лекція 11)
Операційні системи. Керування введенням-виведенням в ОС Linux, UNIX, Windows. (Лекція 11) Wireshark
Wireshark Тема Множество. Подмножество
Тема Множество. Подмножество Оформление газет
Оформление газет Рекурсивные структуры данных. Списки в Prolog
Рекурсивные структуры данных. Списки в Prolog Правовая информатика. Освоение информационных аспектов юридической деятельности
Правовая информатика. Освоение информационных аспектов юридической деятельности World Wide Web Всемирная паутина (11 класс)
World Wide Web Всемирная паутина (11 класс) Сложные структуры данных. Связные списки
Сложные структуры данных. Связные списки Доклад Когнитивная педагогическая технология, районное методическое объединение учителей информатики
Доклад Когнитивная педагогическая технология, районное методическое объединение учителей информатики Файлы. Функции для работы с файлами
Файлы. Функции для работы с файлами КВН по информатике
КВН по информатике Триггеры. DML-триггеры
Триггеры. DML-триггеры Кодирование текстовой информации. Кодировки русского алфавита. (8 класс)
Кодирование текстовой информации. Кодировки русского алфавита. (8 класс) Бази даних. Інформаційні системи. (Тема 1)
Бази даних. Інформаційні системи. (Тема 1) Персональный компьютер как система
Персональный компьютер как система Алгоритми сортування
Алгоритми сортування Этапы НИД и источники научного знания. (Лекция 3)
Этапы НИД и источники научного знания. (Лекция 3) Лекции по программированию на ассемблере
Лекции по программированию на ассемблере Еталонна архітектура хмарних обчислень (Cloud Computing Reference Architecture)
Еталонна архітектура хмарних обчислень (Cloud Computing Reference Architecture)