- Подстановки, сохраняющие изоморфизм. Оптимизационные алгоритмы

Содержание
- 2. Автоморфизмы графа. Пример. α0 =(a)(b)(c)(d); α1=(a c)(b)(d); α2=(b d) (a) (c); α3=(a c) (b d);
- 3. Подгруппа группы А – группа . Подгруппа группы А - группа , где M1 замкнуто относительно
- 4. Стабилизаторы А – группа подстановок на множестве Х. Стабилизатор А(х) элемента х – подгруппа группы А,
- 5. Орбиты А – группа подстановок на множестве Х. Орбита θ(х) элемента х – подмножество множества Х,
- 6. Изоморфизм Вершинная группа Г(G) индуцирует рёберную Г1(G). Для связных p,q графов с p≥3группы Г(G) и Г1(G)
- 7. Изоморфизм α0 =(a)(b)(c)(d); α1=(a c)(b)(d); α2=(b d) (a) (c); α3=(a c) (b d). β0 =(x)(y)(z)(u)(w); β1
- 8. Изоморфизм Рёберная и вершинная группы графа G изоморфны ⇔ G имеет не более одной изолированной вершины,
- 9. Изоморфизм? (a)(b)(c)(d)(ef)≠e
- 10. Изоморфизм? (a)(b)(c)(d)(ef)≠e
- 11. Операции над группами Пусть даны группы автоморфизмов Г(Ga)= 〈A,°〉 и Г(Gb)= 〈B,°〉 . ⏐A⏐ - порядок
- 12. Сложение групп Г= Г(Ga)+Г(Gb) Группа Г действует на множестве Va∪Vb. Степень группы Г равна ⏐Va⏐+⏐Vb⏐. Порядок
- 13. Пример. Сложение групп Дано: ©П.Порешин
- 14. Перечисление графов Умножение групп Г= Г(Ga) × Г(Gb) Группа Г действует на Va × Vb={(x,y)⏐x∈Va, y∈Vb}
- 15. Произведение групп Дано: ©П.Порешин
- 16. Перечисление графов Композиция групп Действует на Va × Vb={(x,y)⏐x∈Va, y∈Vb} Степень группы Г равна d*e Порядок
- 17. Операции на группах подстановок
- 18. Классификация групп подстановок степени p
- 19. Теоремы Группа Г(G) - Sn⇔ G=Kn или G = Если G - простой цикл длины n,
- 20. Теоремы Граф и его дополнение имеют одну и ту же группу: Г(G) =Г Если G1 и
- 21. Простой граф Не тривиальный граф G называется простым, если разложение G=G1×G2 возможно тогда, когда или G1
- 22. Примеры Простой Не простой
- 23. Группа произведения Группа произведения идентична произведению их групп, т.е. Г(G1×G2)= Г(G1)×Г(G2) ⇔ G1 и G2 –
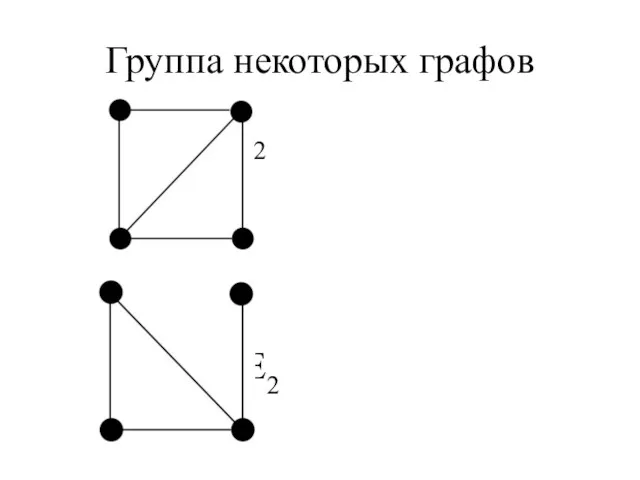
- 24. Группа некоторых графов S1 S2 S3
- 25. Группа некоторых графов E1 +S2 S4
- 26. Группа некоторых графов S2+S2 S2+E2
- 27. Число способов пометить граф Помечаются вершины p,q графа числами от 1 до p. Теорема: Данный граф
- 28. Пример:4!/4=6
- 29. Цикловой индекс группы А – группа порядка m и степени d (1j1+2j2+...djd= d для любой α∈A)
- 30. Цикловой индекс группы. Пример α0 =(a)(b)(c)(d); α1=(a c)(b)(d); α2=(b d) (a) (c); α3=(a c) (b d);
- 31. Цикловой индекс группы. Пример β0 =(x)(y)(z)(u)(w); β1 =(ux)(yz)(w); β2 =(xy)(uz)(w); β3 =(xz)(uy)(w); s15 s22s11 s22s11 s22s11
- 32. К теореме Пойа D -область определения, R - множество значений, - весовая функция, приписывающая каждому r∈R
- 33. К теореме Пойа Объекты, подлежащие счёту – функции из D в R. Элементы области определения –
- 34. К теореме Пойа Пусть имеется cmn фигур с весом (m,n) и Сmn конфигураций с весом xmyn.
- 35. Теорема Пойа Если записать Z(A)=Z(A;a1, a1,… ad), то для любой функции h(x,y) Z(А,h(x,y))=Z(A; h(x,y), h(x2,y2),… h(xd,yd))
- 36. Теорема Пойа. Пример. Z(А,h(x,y))=Z(A; h(x,y), h(x2,y2),… h(xd,yd)) h(x,y)=x+y, h(x2,y2)=x2+y2
- 37. Теорема Пойа. Пример.
- 38. Теорема Пойа. Пример. Z(A)=1/4(x4+4x3y+6 x2y2+4xy3 +y4 +2(x2+y2 ) (x2+2xy+y2 ) + x4+ 2x2y2 +y4) = 1/4(2x4+4x3y+8x2y2+4xy3
- 39. Раскраска в 1 цвет
- 40. Раскраска 3+1
- 41. Раскраска 2+2
- 42. Оптимизационные алгоритмы Нахождение оптимальных решений для взвешенных графов
- 43. Минимальное стягивающее дерево для ориентированного графа v0- корень, каждая вершина достижима из v0. Стягивающее дерево –
- 44. Минимальное стягивающее дерево для взвешенного ориентированного графа Алгоритм Строим произвольное стягивающее дерево. Идём по дереву от
- 45. Кратчайшее стягивающее дерево. Пример
- 46. Критический (самый длинный) путь (Задача сетевого планирования). Нумеруем вершины (если есть дуга (xi,xj), то i L(xi)
- 47. Задача сетевого планирования. Пример. Требуется установить электродвигатель на фундаментной плите. В операцию входят следующие работы: оформление
- 48. Задача сетевого планирования.Пример
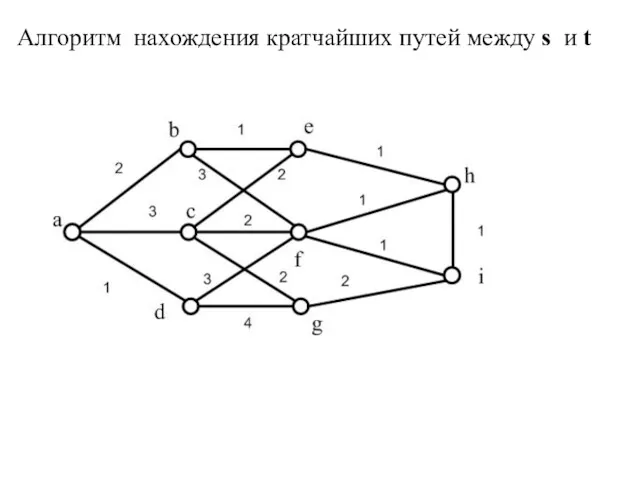
- 49. Алгоритм нахождения кратчайших путей между s и t Взвешенный неориентированный граф Dist(s)=0 , считаем пометку постоянной.
- 50. Алгоритм нахождения кратчайших путей между s и t Среди всех вершин выбираем xi* такую, что Dist(xi*)=min{
- 51. Алгоритм нахождения кратчайших путей между s и t
- 53. Скачать презентацию
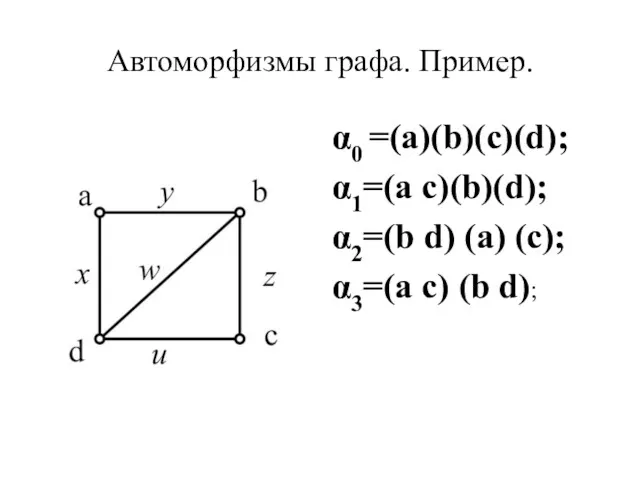
Автоморфизмы графа. Пример.
α0 =(a)(b)(c)(d);
α1=(a c)(b)(d);
α2=(b d) (a) (c);
α3=(a c) (b d);
Автоморфизмы графа. Пример.
α0 =(a)(b)(c)(d);
α1=(a c)(b)(d);
α2=(b d) (a) (c);
α3=(a c) (b d);
Подгруппа группы
А – группа .
Подгруппа группы А - группа , где
Подгруппа группы
А – группа
Подгруппа группы А - группа
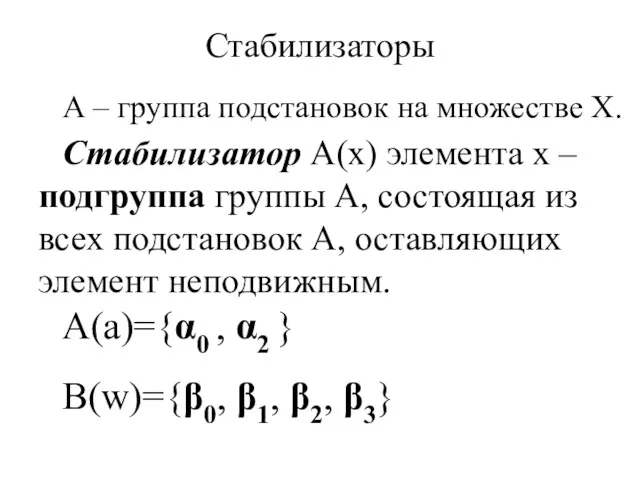
Стабилизаторы
А – группа подстановок на множестве Х.
Стабилизатор А(х) элемента х
Стабилизаторы
А – группа подстановок на множестве Х.
Стабилизатор А(х) элемента х
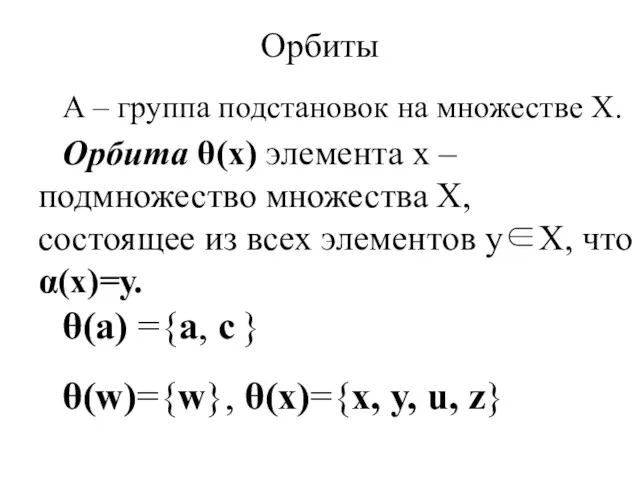
Орбиты
А – группа подстановок на множестве Х.
Орбита θ(х) элемента х
Орбиты
А – группа подстановок на множестве Х.
Орбита θ(х) элемента х
Изоморфизм
Вершинная группа Г(G) индуцирует рёберную Г1(G).
Для связных p,q графов с p≥3группы
Изоморфизм
Вершинная группа Г(G) индуцирует рёберную Г1(G).
Для связных p,q графов с p≥3группы
Изоморфизм
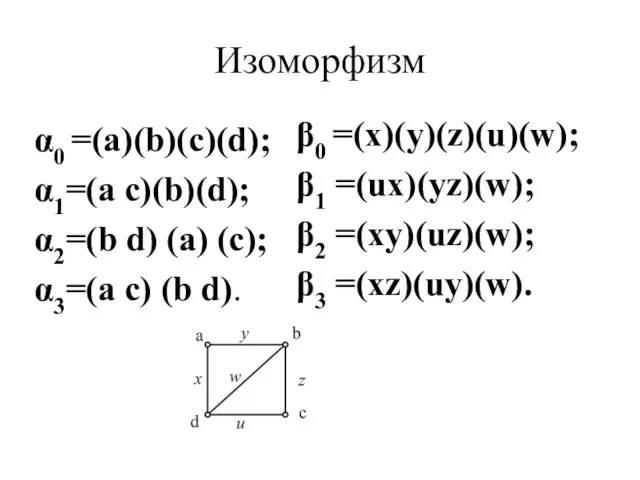
α0 =(a)(b)(c)(d);
α1=(a c)(b)(d);
α2=(b d) (a) (c);
α3=(a c) (b d).
β0 =(x)(y)(z)(u)(w);
β1 =(ux)(yz)(w);
β2
Изоморфизм
α0 =(a)(b)(c)(d);
α1=(a c)(b)(d);
α2=(b d) (a) (c);
α3=(a c) (b d).
β0 =(x)(y)(z)(u)(w);
β1 =(ux)(yz)(w);
β2
Изоморфизм
Рёберная и вершинная группы графа G изоморфны ⇔ G имеет не
Изоморфизм
Рёберная и вершинная группы графа G изоморфны ⇔ G имеет не
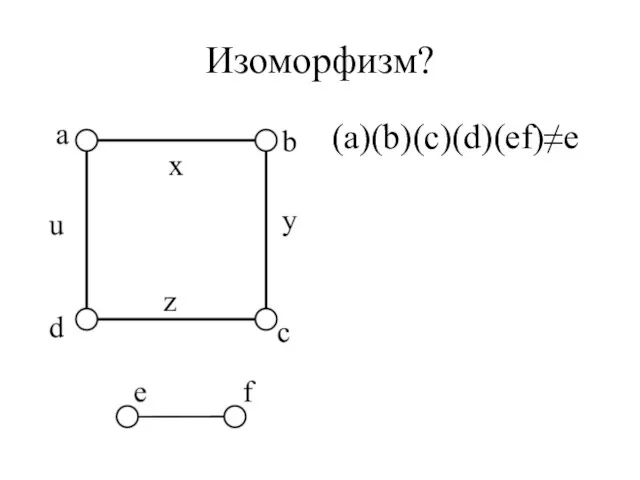
Изоморфизм?
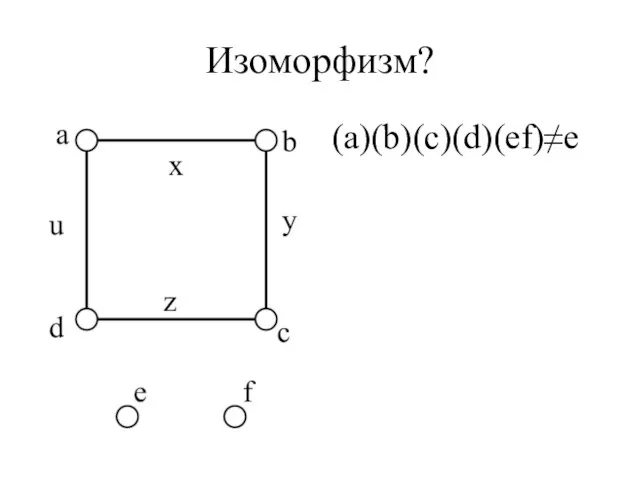
(a)(b)(c)(d)(ef)≠e
Изоморфизм?
(a)(b)(c)(d)(ef)≠e
Изоморфизм?
(a)(b)(c)(d)(ef)≠e
Изоморфизм?
(a)(b)(c)(d)(ef)≠e
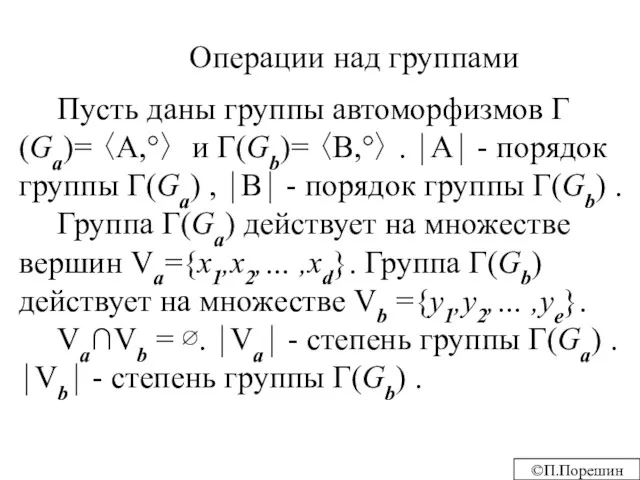
Операции над группами
Пусть даны группы автоморфизмов Г(Ga)= 〈A,°〉 и Г(Gb)=
Операции над группами
Пусть даны группы автоморфизмов Г(Ga)= 〈A,°〉 и Г(Gb)=
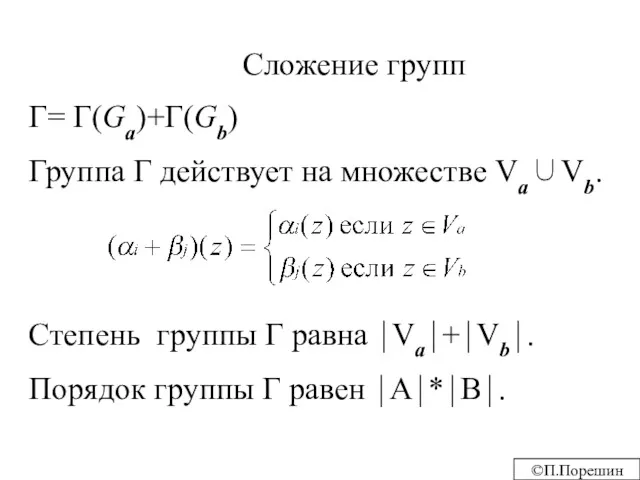
Сложение групп
Г= Г(Ga)+Г(Gb)
Группа Г действует на множестве Va∪Vb.
Степень группы
Сложение групп
Г= Г(Ga)+Г(Gb)
Группа Г действует на множестве Va∪Vb.
Степень группы
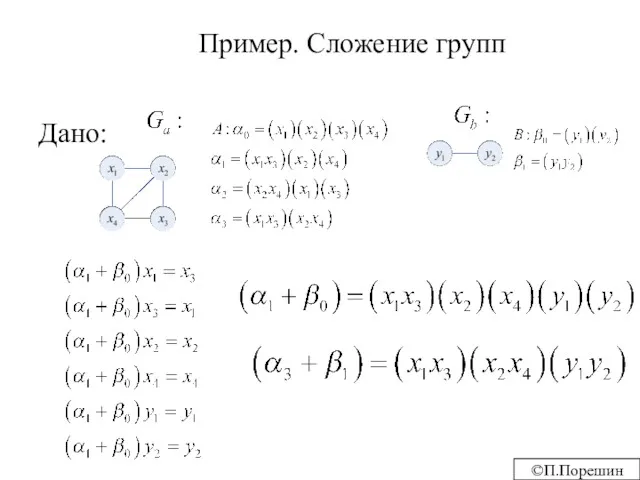
Пример. Сложение групп
Дано:
©П.Порешин
Пример. Сложение групп
Дано:
©П.Порешин
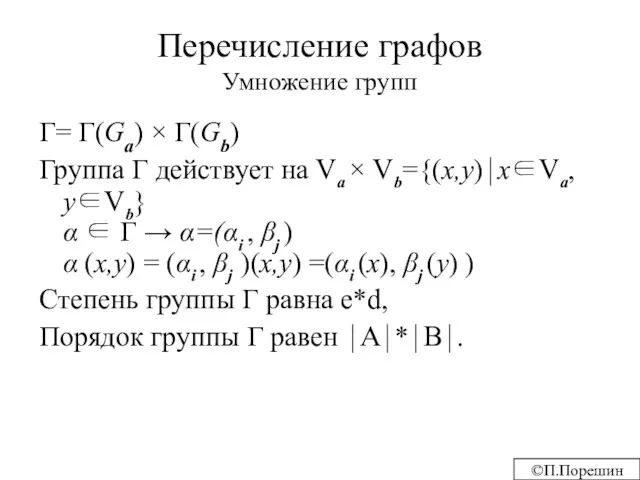
Перечисление графов
Умножение групп
Г= Г(Ga) × Г(Gb)
Группа Г действует на
Перечисление графов
Умножение групп
Г= Г(Ga) × Г(Gb)
Группа Г действует на
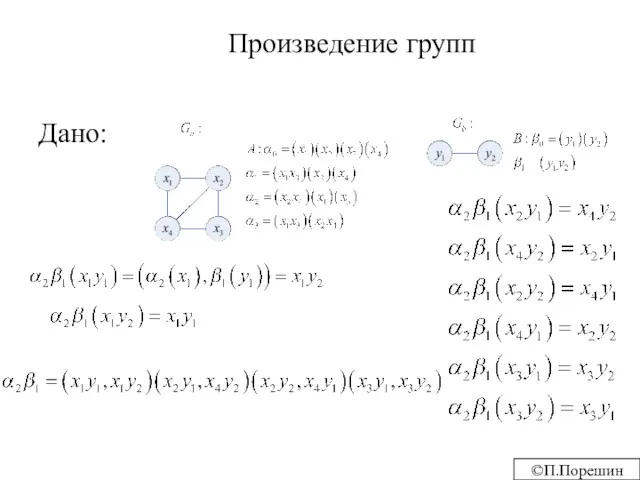
Произведение групп
Дано:
©П.Порешин
Произведение групп
Дано:
©П.Порешин
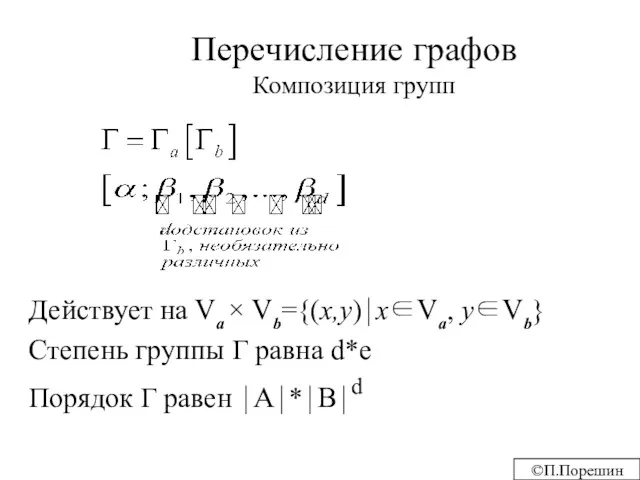
Перечисление графов
Композиция групп
Действует на Va × Vb={(x,y)⏐x∈Va, y∈Vb}
Степень группы Г
Перечисление графов
Композиция групп
Действует на Va × Vb={(x,y)⏐x∈Va, y∈Vb}
Степень группы Г
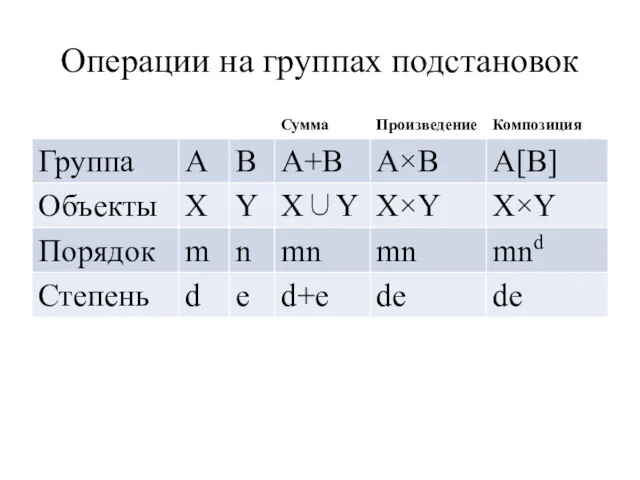
Операции на группах подстановок
Операции на группах подстановок
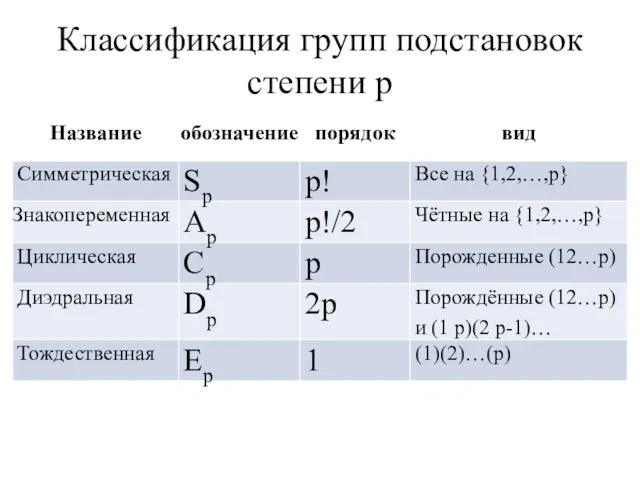
Классификация групп подстановок степени p
Классификация групп подстановок степени p
Теоремы
Группа Г(G) - Sn⇔ G=Kn или G =
Если G - простой
Теоремы
Группа Г(G) - Sn⇔ G=Kn или G =
Если G - простой
Теоремы
Граф и его дополнение имеют одну и ту же группу:
Г(G)
Теоремы
Граф и его дополнение имеют одну и ту же группу:
Г(G)
Простой граф
Не тривиальный граф G называется простым, если разложение G=G1×G2 возможно
Простой граф
Не тривиальный граф G называется простым, если разложение G=G1×G2 возможно
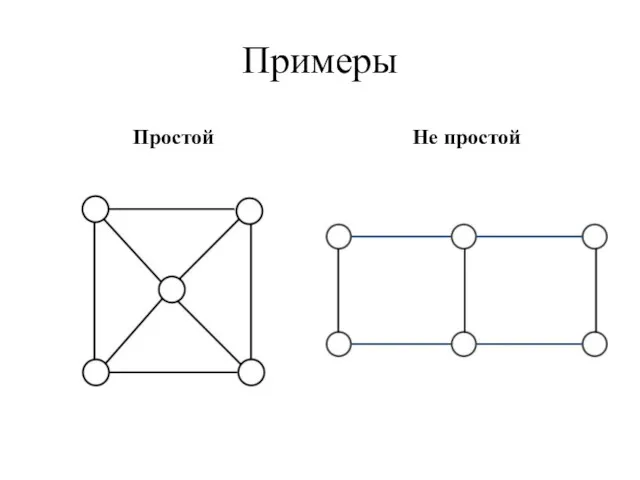
Примеры
Простой
Не простой
Примеры
Простой
Не простой
Группа произведения
Группа произведения идентична произведению их групп, т.е.
Г(G1×G2)= Г(G1)×Г(G2)
⇔
G1 и G2
Группа произведения
Группа произведения идентична произведению их групп, т.е.
Г(G1×G2)= Г(G1)×Г(G2)
⇔
G1 и G2
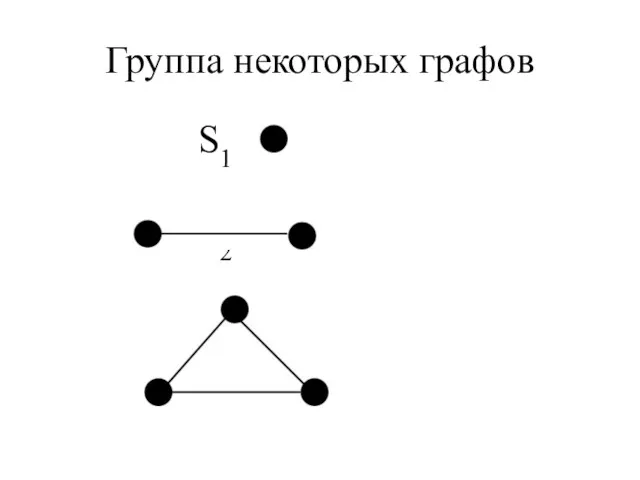
Группа некоторых графов
S1
S2
S3
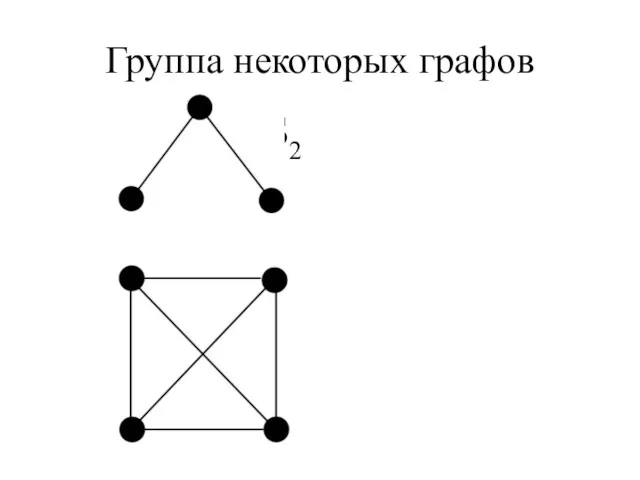
Группа некоторых графов
S1
S2
S3
Группа некоторых графов
E1 +S2
S4
Группа некоторых графов
E1 +S2
S4
Группа некоторых графов
S2+S2
S2+E2
Группа некоторых графов
S2+S2
S2+E2
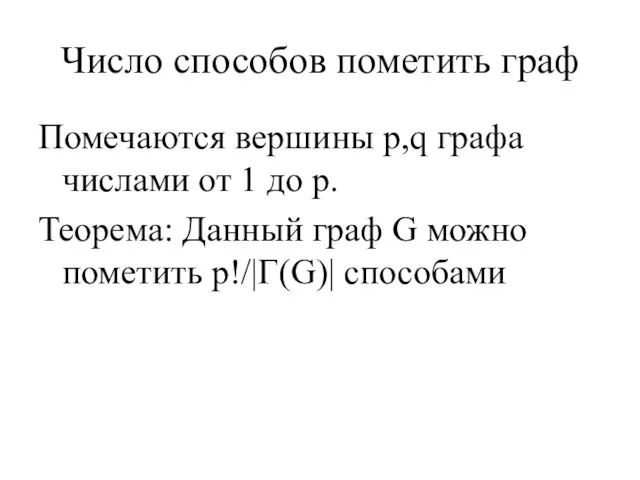
Число способов пометить граф
Помечаются вершины p,q графа числами от 1 до
Число способов пометить граф
Помечаются вершины p,q графа числами от 1 до
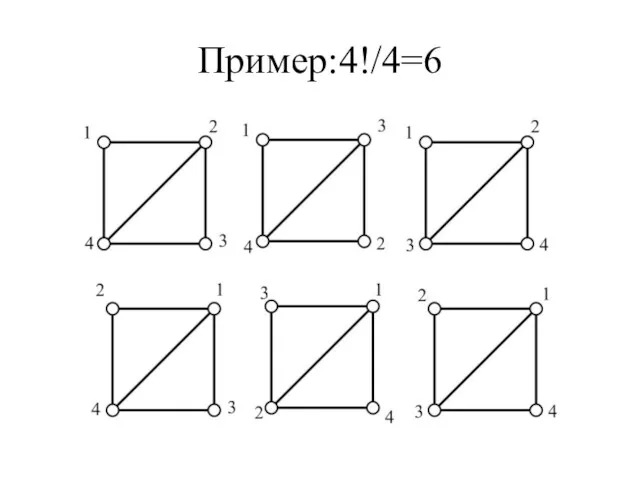
Пример:4!/4=6
Пример:4!/4=6
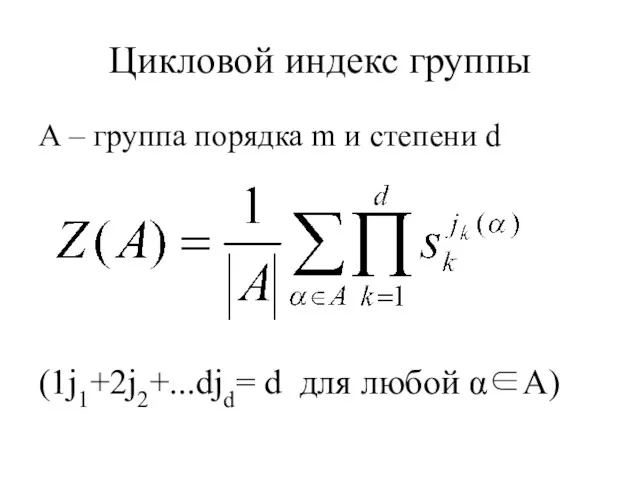
Цикловой индекс группы
А – группа порядка m и степени d
(1j1+2j2+...djd= d
Цикловой индекс группы
А – группа порядка m и степени d
(1j1+2j2+...djd= d
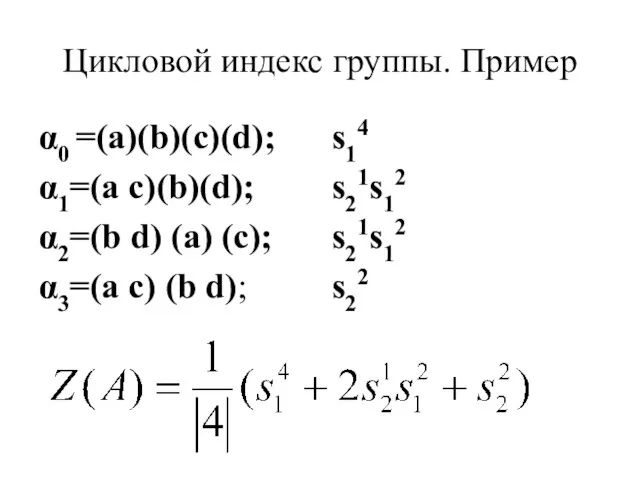
Цикловой индекс группы. Пример
α0 =(a)(b)(c)(d);
α1=(a c)(b)(d);
α2=(b d) (a) (c);
α3=(a c) (b
Цикловой индекс группы. Пример
α0 =(a)(b)(c)(d);
α1=(a c)(b)(d);
α2=(b d) (a) (c);
α3=(a c) (b
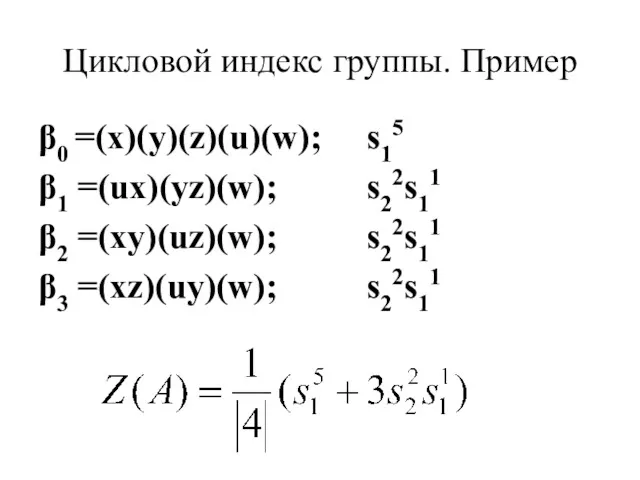
Цикловой индекс группы. Пример
β0 =(x)(y)(z)(u)(w);
β1 =(ux)(yz)(w);
β2 =(xy)(uz)(w);
β3 =(xz)(uy)(w);
s15
s22s11
s22s11
s22s11
Цикловой индекс группы. Пример
β0 =(x)(y)(z)(u)(w);
β1 =(ux)(yz)(w);
β2 =(xy)(uz)(w);
β3 =(xz)(uy)(w);
s15
s22s11
s22s11
s22s11
К теореме Пойа
D -область определения,
R - множество значений,
- весовая
К теореме Пойа
D -область определения,
R - множество значений,
- весовая
К теореме Пойа
Объекты, подлежащие счёту – функции из D в R.
Элементы
К теореме Пойа
Объекты, подлежащие счёту – функции из D в R.
Элементы
К теореме Пойа
Пусть имеется cmn фигур с весом (m,n) и Сmn
К теореме Пойа
Пусть имеется cmn фигур с весом (m,n) и Сmn
Теорема Пойа
Если записать Z(A)=Z(A;a1, a1,… ad), то для любой функции h(x,y)
Теорема Пойа
Если записать Z(A)=Z(A;a1, a1,… ad), то для любой функции h(x,y)
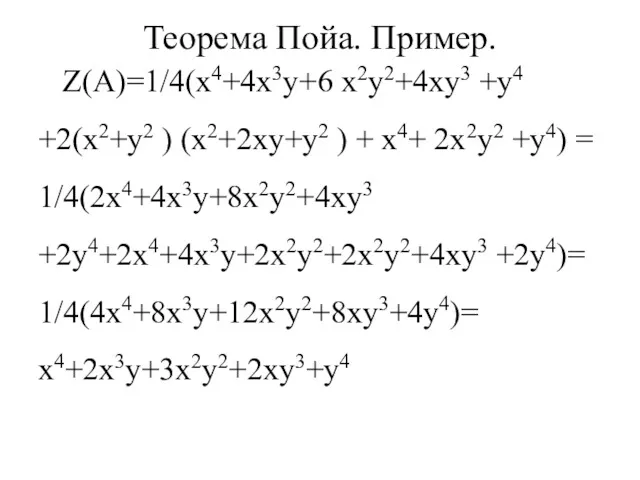
Теорема Пойа. Пример.
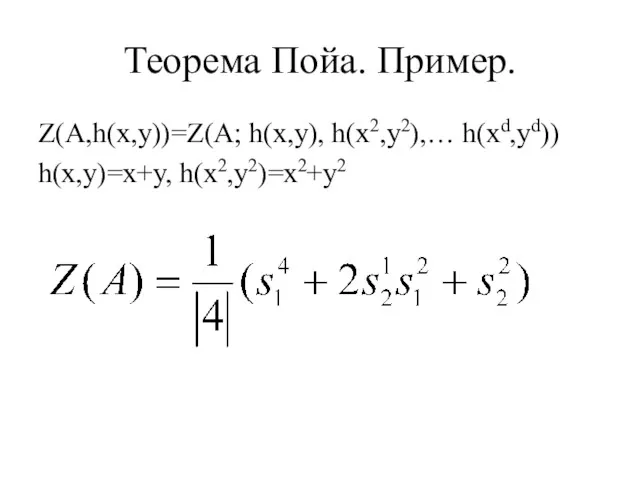
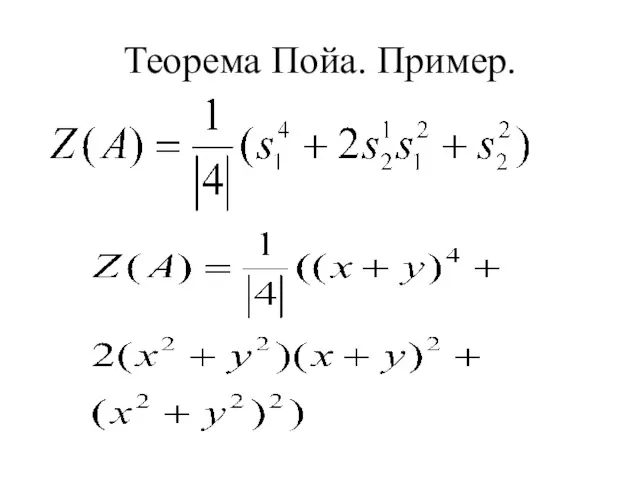
Z(А,h(x,y))=Z(A; h(x,y), h(x2,y2),… h(xd,yd))
h(x,y)=x+y, h(x2,y2)=x2+y2
Теорема Пойа. Пример.
Z(А,h(x,y))=Z(A; h(x,y), h(x2,y2),… h(xd,yd))
h(x,y)=x+y, h(x2,y2)=x2+y2
Теорема Пойа. Пример.
Теорема Пойа. Пример.
Теорема Пойа. Пример.
Z(A)=1/4(x4+4x3y+6 x2y2+4xy3 +y4 +2(x2+y2 ) (x2+2xy+y2 ) + x4+
Теорема Пойа. Пример.
Z(A)=1/4(x4+4x3y+6 x2y2+4xy3 +y4 +2(x2+y2 ) (x2+2xy+y2 ) + x4+
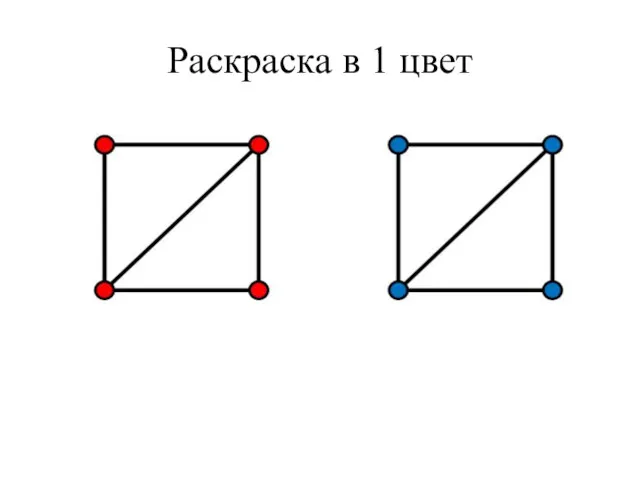
Раскраска в 1 цвет
Раскраска в 1 цвет
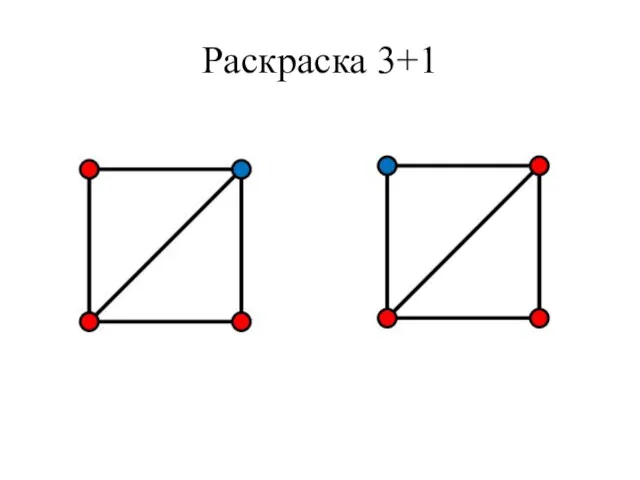
Раскраска 3+1
Раскраска 3+1
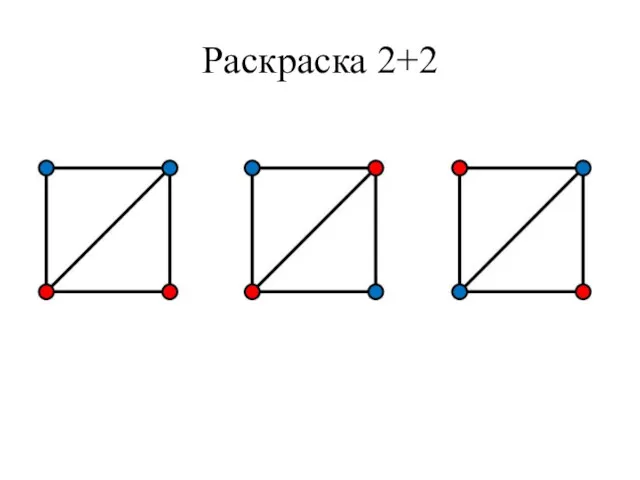
Раскраска 2+2
Раскраска 2+2
Оптимизационные алгоритмы
Нахождение оптимальных решений для взвешенных графов
Оптимизационные алгоритмы
Нахождение оптимальных решений для взвешенных графов
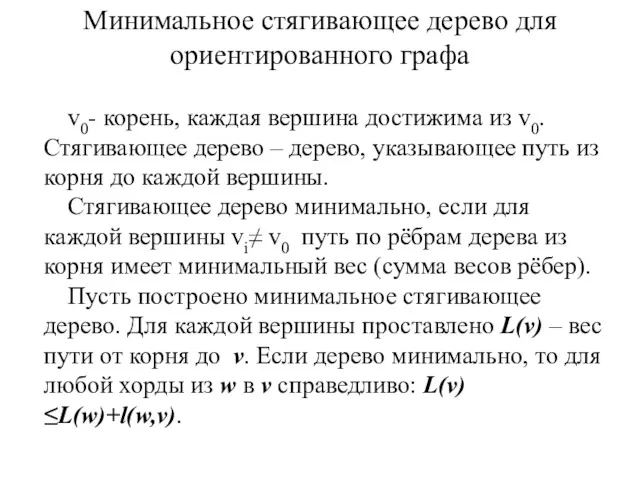
Минимальное стягивающее дерево для ориентированного графа
v0- корень, каждая вершина достижима из
Минимальное стягивающее дерево для ориентированного графа
v0- корень, каждая вершина достижима из
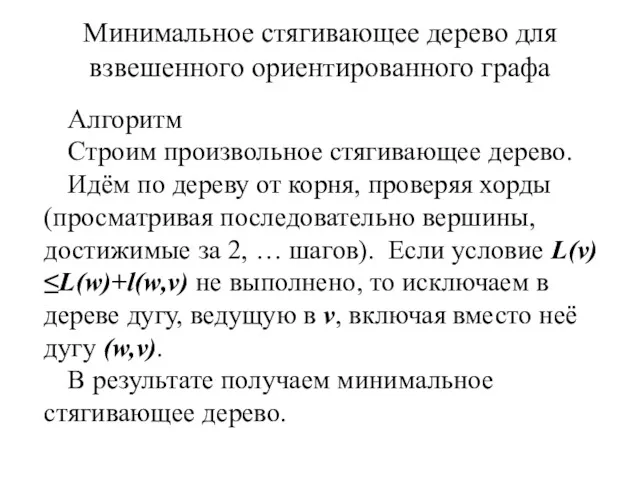
Минимальное стягивающее дерево для взвешенного ориентированного графа
Алгоритм
Строим произвольное стягивающее дерево.
Идём по
Минимальное стягивающее дерево для взвешенного ориентированного графа
Алгоритм
Строим произвольное стягивающее дерево.
Идём по
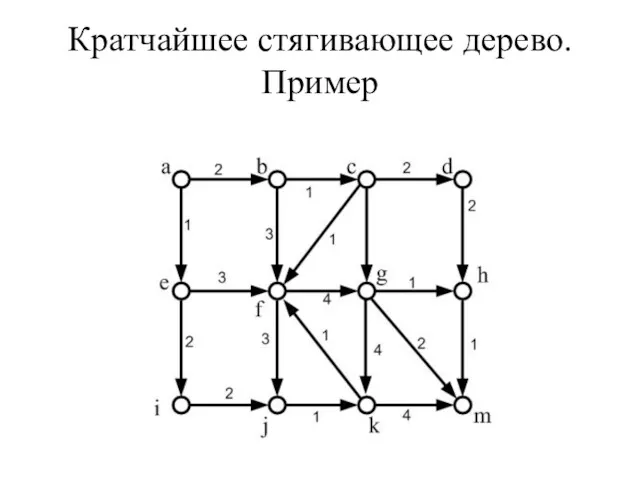
Кратчайшее стягивающее дерево. Пример
Кратчайшее стягивающее дерево. Пример
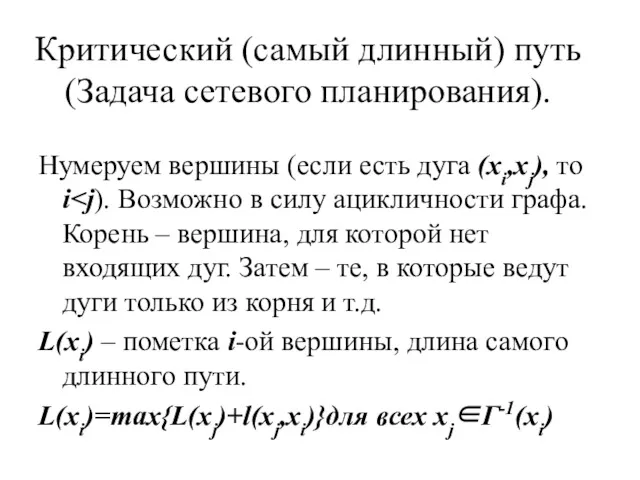
Критический (самый длинный) путь (Задача сетевого планирования).
Нумеруем вершины (если есть дуга
Критический (самый длинный) путь (Задача сетевого планирования).
Нумеруем вершины (если есть дуга
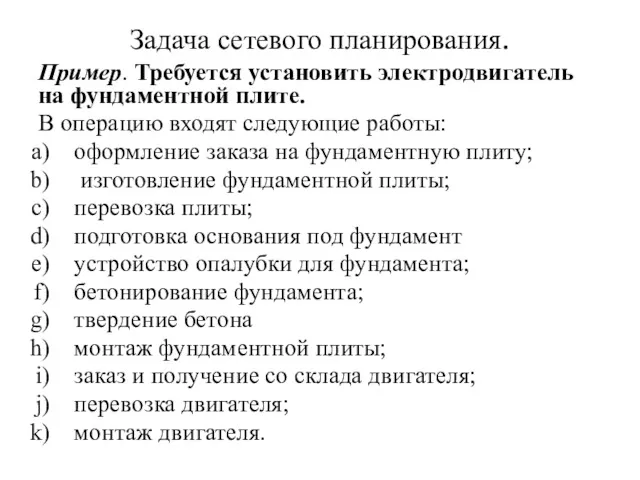
Задача сетевого планирования.
Пример. Требуется установить электродвигатель на фундаментной плите.
В операцию
Задача сетевого планирования.
Пример. Требуется установить электродвигатель на фундаментной плите.
В операцию
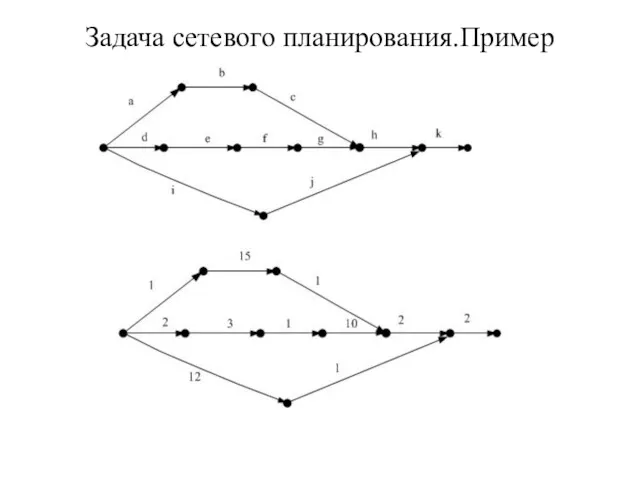
Задача сетевого планирования.Пример
Задача сетевого планирования.Пример
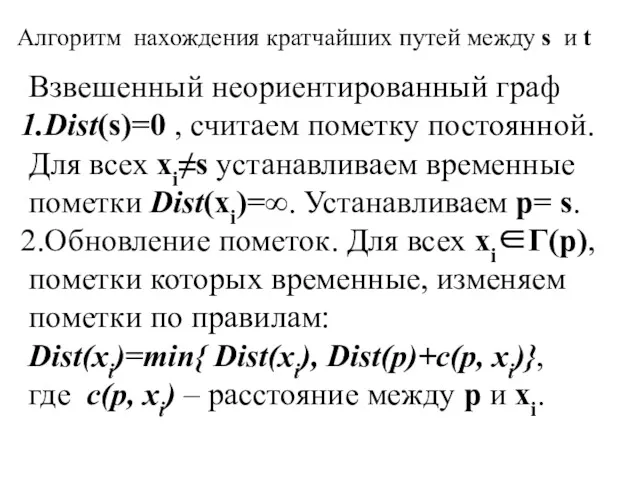
Алгоритм нахождения кратчайших путей между s и t
Взвешенный неориентированный граф
Dist(s)=0 ,
Алгоритм нахождения кратчайших путей между s и t
Взвешенный неориентированный граф
Dist(s)=0 ,
Алгоритм нахождения кратчайших путей между s и t
Среди всех вершин выбираем
Алгоритм нахождения кратчайших путей между s и t
Среди всех вершин выбираем
Алгоритм нахождения кратчайших путей между s и t
Алгоритм нахождения кратчайших путей между s и t
 Технологии программирования. Строки
Технологии программирования. Строки Разработка информационной системы инвентаризации компьютеров в сети для предприятия
Разработка информационной системы инвентаризации компьютеров в сети для предприятия Параметры страницы. Форматирование текста
Параметры страницы. Форматирование текста 3D печать. Будущее и перспективы. (Часть 1)
3D печать. Будущее и перспективы. (Часть 1) Вероятностный подход к определению количества информации.
Вероятностный подход к определению количества информации. Пример кейса-референса
Пример кейса-референса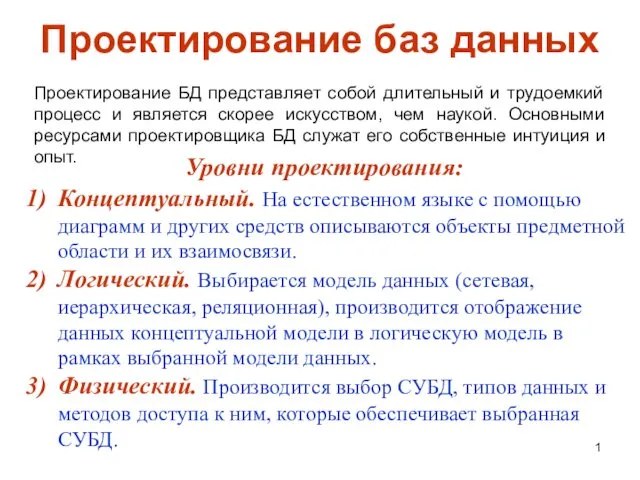 Проектирование баз данных
Проектирование баз данных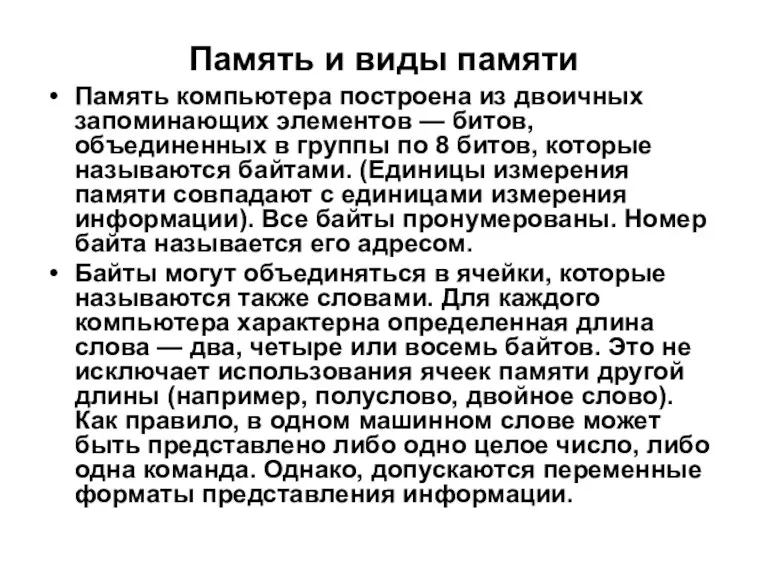 Память и виды памяти
Память и виды памяти Практическая работа Устройства компьютера. Адрес клетки
Практическая работа Устройства компьютера. Адрес клетки Powerpoint бағдарламасымен жұмыс жасау
Powerpoint бағдарламасымен жұмыс жасау Безопасность в сети Интернет
Безопасность в сети Интернет Локальные сети. Параметры сетей и их стандарты
Локальные сети. Параметры сетей и их стандарты Нестандартные периферийные устройства ПК
Нестандартные периферийные устройства ПК Информационная безопасность
Информационная безопасность fbea8-fe014e85
fbea8-fe014e85 Электронные российские учебники
Электронные российские учебники Таблицы в MsWord
Таблицы в MsWord Creating Functions and Debugging Subprograms
Creating Functions and Debugging Subprograms Моделирование. Модели и моделирование
Моделирование. Модели и моделирование Что такое CSS
Что такое CSS Сведения о программе 1С: Предприятие
Сведения о программе 1С: Предприятие Программирование на Python. Урок 11. Взаимодействие объектов
Программирование на Python. Урок 11. Взаимодействие объектов Информатика 10-11 класс тема Логика
Информатика 10-11 класс тема Логика Массивы
Массивы Язык С++. Введение в С++
Язык С++. Введение в С++ Как составить техническое задание?
Как составить техническое задание? Дополнительная литература для лекций курса - Основы тестирования ПО
Дополнительная литература для лекций курса - Основы тестирования ПО Открытый урок
Открытый урок