- Теория автоматического управления

Содержание
- 2. Цель изучения дисциплины Обучение студентов основам теории автоматического управления, необходимым при проектировании, исследовании, производстве и эксплуатации
- 3. Задачи изучения дисциплины: освоение основных принципов построения систем автоматического управления, форм представления и преобразования моделей систем,
- 4. Место дисциплины в структуре основной образовательной программы Дисциплина относится к базовой части образовательной программы. Общая трудоемкость
- 5. Изучение дисциплины базируется на учебном материале следующих дисциплин: Математика Физика Общая электротехника и электроника Теоретическая механика
- 6. Основные разделы математики: линейная алгебра, последовательности и ряды, дифференциальное и интегральное исчисление, преобразования Лапласа и Фурье,
- 7. Разделы физики физические основы механики, физика колебаний и волн, электричество и магнетизм
- 8. Теория автоматического управления используется при изучении дисциплин: Моделирование систем, Средства автоматизации и управления, Проектирование систем управления,
- 9. В результате освоения дисциплины Теория автоматического управления студент должен знать: методологические основы функционирования, моделирования и синтеза
- 10. уметь: строить математические модели объектов и систем автоматического управления (САУ); проводить анализ САУ, оценивать статические и
- 11. владеть: принципами и методами анализа и синтеза САУ .
- 12. Учебно-методическое и информационное обеспечение дисциплины Основная литература 1 Теория автоматического управления [текст]: учеб. для вузов /
- 13. Дополнительная литература 1 Попов, Е.П. Теория линейных систем автоматического регулирования и управления [текст]: учеб. пособие для
- 14. Методические указания 1 Теория автоматического управления [текст]: методические указания по выполнению курсового проекта для студентов направления
- 15. Специализированное программное обеспечение VisSim 3.0 (Academic) - ПО для симуляции систем [Электронный ресурс]. – М.: Visual
- 16. Интернет- ресурсы Образовательный математический ресурс: [Электронный ресурс] – Режим доступа: www.exponenta.ru Клиначёв Н. В. Теория систем
- 17. Объем дисциплины и виды учебной работы 4 семестр Лекции – 36 ч (18 занятий) Практические занятия
- 18. Объем дисциплины и виды учебной работы 3 семестр Лекции 4 ч Практические занятия 2 ч Лабораторные
- 19. Основные понятия и определения
- 20. Производственный процесс Основой деятельности любого предприятия является производственный процесс, под которым понимают организованную совокупность взаимосвязанных трудовых
- 21. Иерархия элементов производственного процесса Производственный процесс Технологический процесс №1 Технологический процесс №n технологические операции 1 2
- 22. Технологический процесс – последовательность целенаправленных действий (операций) по получению из исходного материала конечного продукта (полуфабриката или
- 23. Технологические операции условно можно разделить на рабочие операции и операции управления. Рабочие операции – это действия,
- 24. Механизация- замена человека в выполнении рабочих операций. Автоматизация – замена человека в выполнении операций управления.
- 25. Направления развития современного производства: существенное улучшение качества продукции; повышение производительности за счет технического усовершенствования; повышение интеллектуальной
- 26. Важнейшую роль для достижения высоких показателей в этих стратегических направлениях играет автоматизация производственных процессов, которая связана
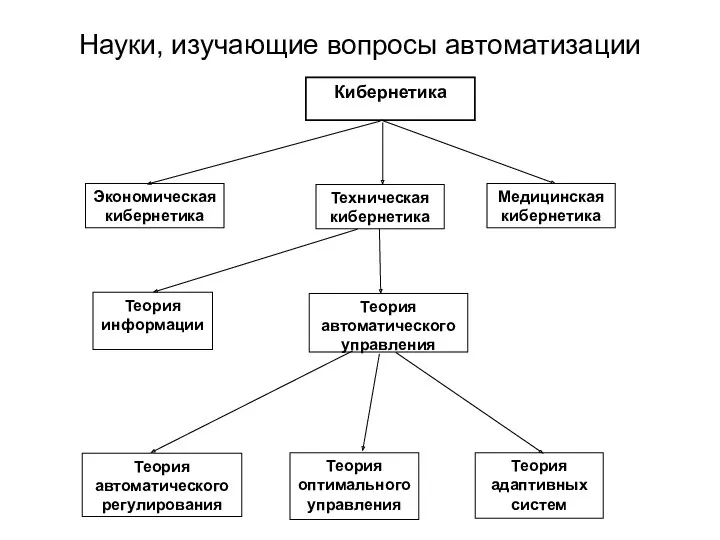
- 27. Теория автоматического управления относится к числу научных дисциплин, образующих в совокупности науку об управлении. Эта наука
- 28. Науки, изучающие вопросы автоматизации
- 29. Кибернетика – (от греческого слова искусство управления) наука об общих закономерностях процессов управления, связи и переработки
- 30. Теория автоматического управления (ТАУ) – это наука о принципах построения и методах расчета систем автоматического управления
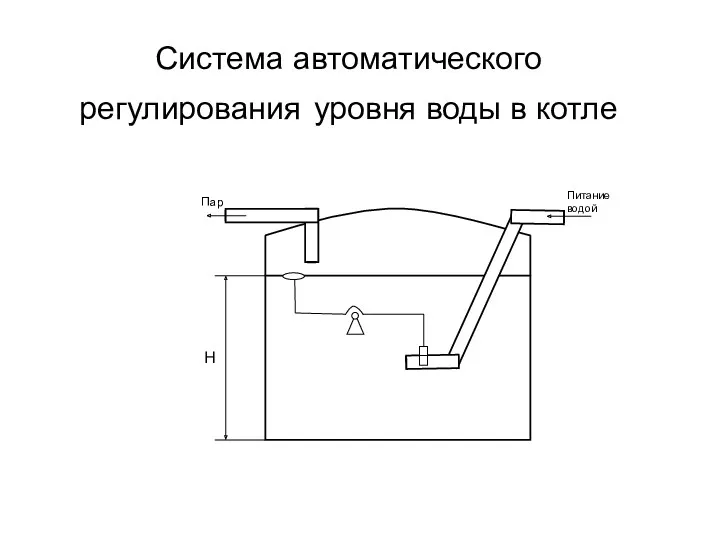
- 31. История развития ТАУ Первый автоматический регулятор был изобретен в 1765 г. И.И.Ползуновым. Он был предназначен для
- 32. Система автоматического регулирования уровня воды в котле
- 33. Рассмотренные устройства не всегда работали удовлетворительно. Во многих случаях регулятор вместо того, чтобы поддерживать постоянное значение
- 34. Развитие научной теории Основоположниками научной теории управления считаются Дж. Максвелл и профессор Петербургского технологического института И.А.
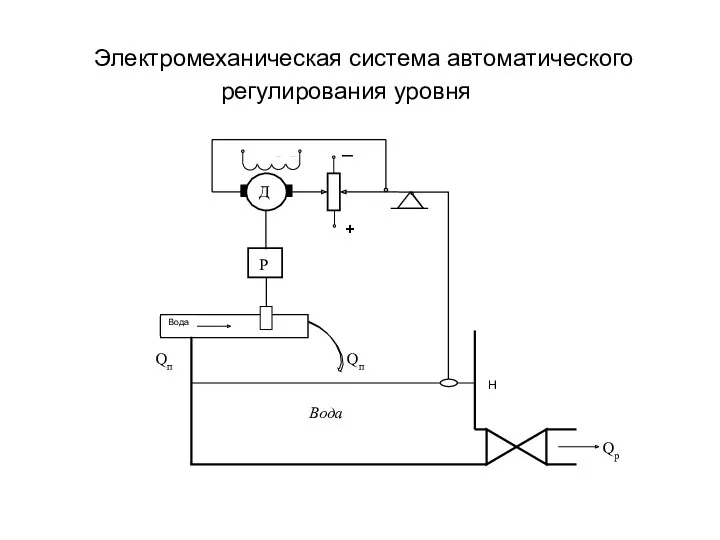
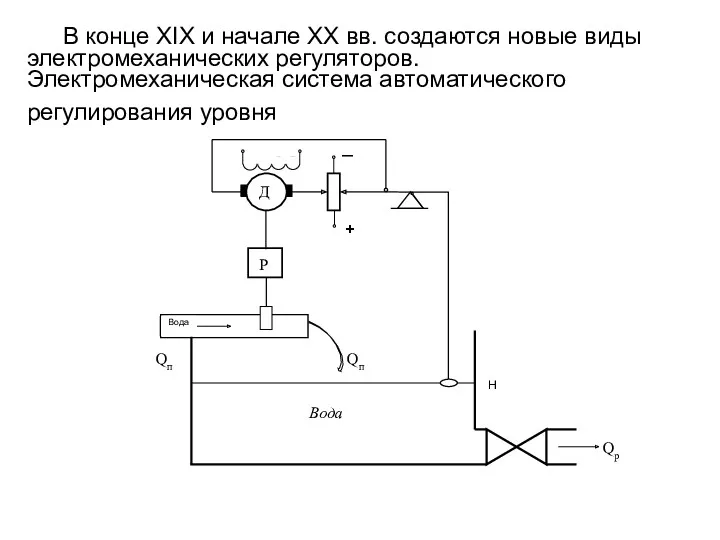
- 35. Электромеханическая система автоматического регулирования уровня H
- 36. Математические основы теории автоматического управления создавали на протяжении многих лет ученые и математики Пьер Симон Лаплас
- 37. Большой вклад в развитие теории автоматического управления внесли российские ученые: Н.Е. Жуковский, А. Н. Чебышев, В.И.
- 38. В конце ХIX и начале ХХ вв. создаются новые виды электромеханических регуляторов. Электромеханическая система автоматического регулирования
- 39. После 1940 г. теория автоматического регулирования выделилась в самостоятельную науку. Были созданы методы расчета динамических систем.
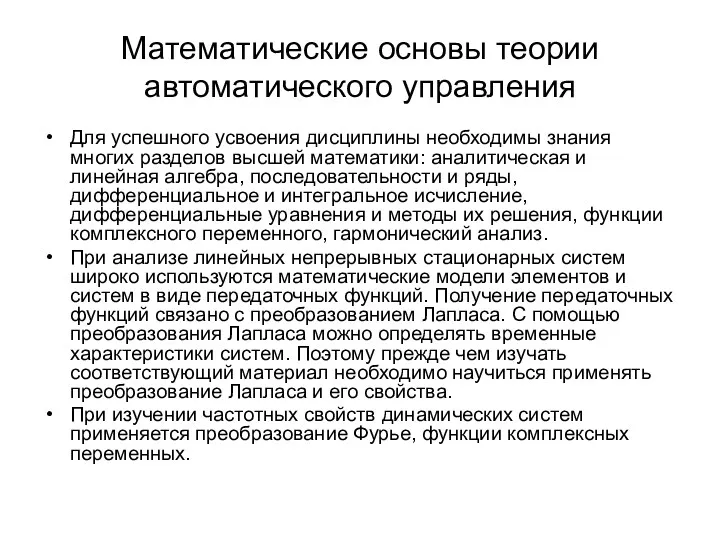
- 40. Математические основы теории автоматического управления Для успешного усвоения дисциплины необходимы знания многих разделов высшей математики: аналитическая
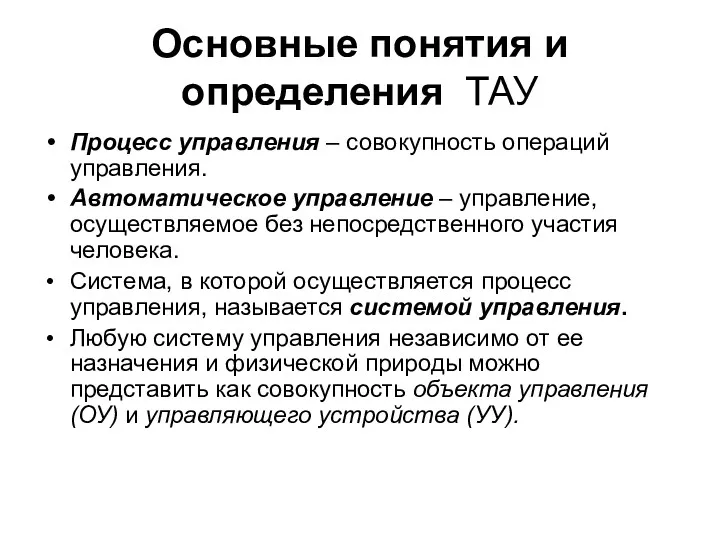
- 41. Основные понятия и определения ТАУ Процесс управления – совокупность операций управления. Автоматическое управление – управление, осуществляемое
- 42. Система управления
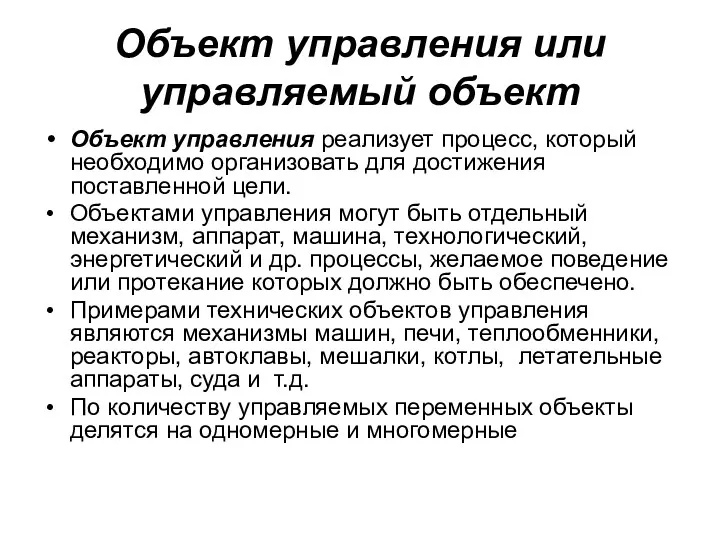
- 43. Объект управления или управляемый объект Объект управления реализует процесс, который необходимо организовать для достижения поставленной цели.
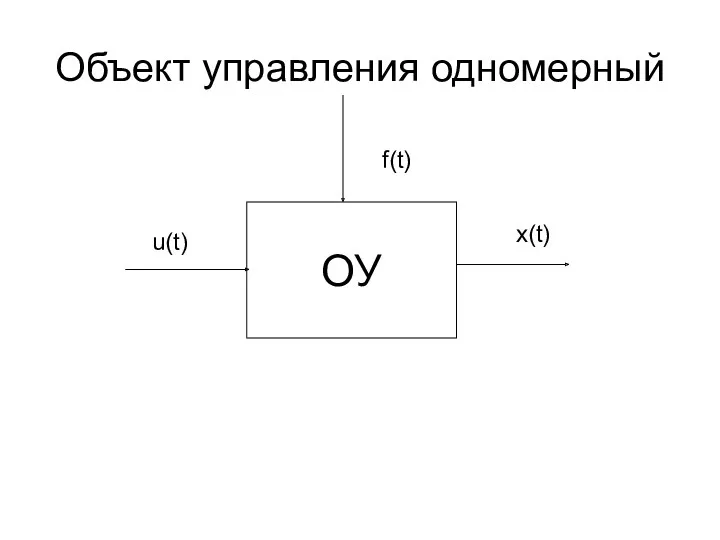
- 44. Объект управления одномерный ОУ u(t) x(t) f(t)
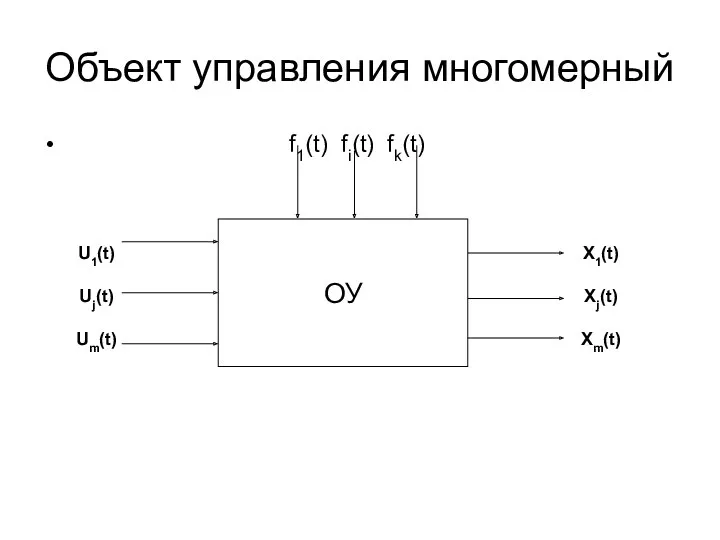
- 45. Объект управления многомерный f1(t) fi(t) fk(t) ОУ U1(t) Uj(t) Um(t) X1(t) Xj(t) Xm(t)
- 46. Переменные , определяющие поведение ОУ x(t) - управляемая или выходная переменная объекта управления. Управляемыми переменными для
- 47. Переменные одномерных объектов представляют собой скаляры - x(t), u(t), f(t). В случае многомерного объекта управления переменные
- 48. Математическая модель объекта управления А – оператор, определяющий вид зависимости, x(t0) – начальное состояние объекта управления
- 49. Объекты управления в большинстве обладают инерцией, т.е. изменение выходных координат под влиянием входных происходит не мгновенно.
- 50. Объекты управления в зависимости от реакции на входные воздействия делятся на устойчивые, неустойчивые, нейтральные.
- 51. Определения Устойчивым называется объект управления, у которого отклонение управляемой переменной x(t), вызванное изменением какого-либо внешнего воздействия,
- 52. Управляющее устройство (УУ) УУ – совокупность технических средств, предназначенных для управления объектом. УУ формирует управляющее u(t)
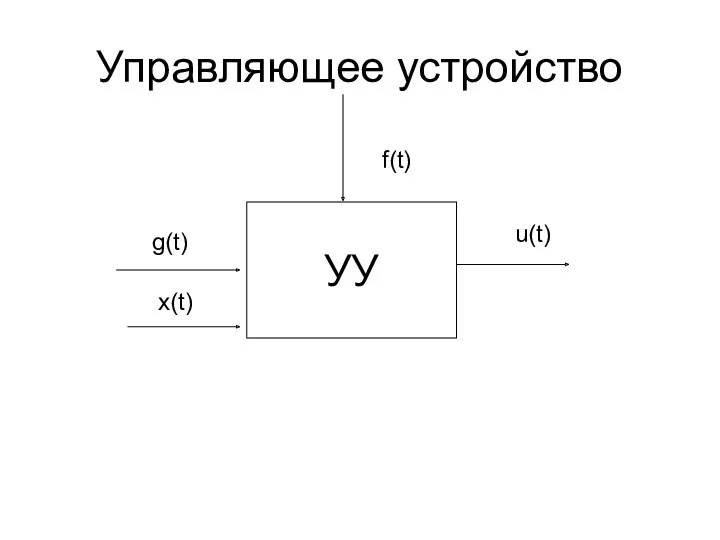
- 53. Управляющее устройство УУ g(t) u(t) f(t) x(t)
- 54. Входные и выходные переменные УУ g(t) – задающее воздействие, внешнее воздействие, которое определяет требуемый характер изменения
- 55. Функции управляющего устройства 1) получение информации о цели управления; 2) получение информации о состоянии процесса и
- 56. Первые две функции определяют информационный аспект управления; третья и четвертая – алгоритмический; пятая – энергетический аспект
- 57. Функциональные элементы управляющего устройства Измерительные (чувствительные) элементы (датчики) Средства вычисления (регуляторы, контроллеры, компьютеры, усилительно-преобразовательные устройства )
- 58. Алгоритм управления Алгоритм управления - правила формирования управляющего воздействия в зависимости от цели управления и информации
- 59. Алгоритм функционирования Алгоритмом функционирования называется совокупность правил, предписаний или математических зависимостей, определяющих изменение управляемых переменных в
- 60. Функциональная схема системы автоматического регулирования g(t) e(t) U(t) X(t) y(t) f(t)
- 61. Состав функциональной схемы ОУ – объект управления; Д – датчик (чувствительный элемент, измерительный преобразователь); ИМ- исполнительный
- 63. Скачать презентацию
Цель изучения дисциплины
Обучение студентов основам теории автоматического управления, необходимым при проектировании,
Цель изучения дисциплины
Обучение студентов основам теории автоматического управления, необходимым при проектировании,
Задачи изучения дисциплины:
освоение
основных принципов построения систем автоматического управления,
форм
Задачи изучения дисциплины:
освоение
основных принципов построения систем автоматического управления,
форм
Место дисциплины в структуре основной образовательной программы
Дисциплина относится к базовой части
Место дисциплины в структуре основной образовательной программы
Дисциплина относится к базовой части
Изучение дисциплины базируется на учебном материале следующих дисциплин:
Математика
Физика
Общая электротехника и электроника
Изучение дисциплины базируется на учебном материале следующих дисциплин:
Математика
Физика
Общая электротехника и электроника
Основные разделы математики:
линейная алгебра,
последовательности и ряды,
дифференциальное и интегральное исчисление,
Основные разделы математики:
линейная алгебра,
последовательности и ряды,
дифференциальное и интегральное исчисление,
Разделы физики
физические основы механики,
физика колебаний и волн,
электричество и магнетизм
Разделы физики
физические основы механики,
физика колебаний и волн,
электричество и магнетизм
Теория автоматического управления используется при изучении дисциплин:
Моделирование систем,
Средства автоматизации
Теория автоматического управления используется при изучении дисциплин:
Моделирование систем,
Средства автоматизации
В результате освоения дисциплины Теория автоматического управления студент должен знать:
методологические
В результате освоения дисциплины Теория автоматического управления студент должен знать:
методологические
уметь:
строить математические модели объектов и систем автоматического управления (САУ);
проводить анализ САУ,
уметь:
строить математические модели объектов и систем автоматического управления (САУ);
проводить анализ САУ,
владеть:
принципами и методами анализа и синтеза САУ .
владеть:
принципами и методами анализа и синтеза САУ .
Учебно-методическое и информационное обеспечение дисциплины
Основная литература
1 Теория автоматического управления [текст]: учеб.
Учебно-методическое и информационное обеспечение дисциплины
Основная литература
1 Теория автоматического управления [текст]: учеб.
Дополнительная литература
1 Попов, Е.П. Теория линейных систем автоматического регулирования
Дополнительная литература
1 Попов, Е.П. Теория линейных систем автоматического регулирования
![Методические указания 1 Теория автоматического управления [текст]: методические указания по](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/324654/slide-13.jpg)
Методические указания
1 Теория автоматического управления [текст]: методические указания по выполнению
Методические указания
1 Теория автоматического управления [текст]: методические указания по выполнению
Специализированное программное обеспечение
VisSim 3.0 (Academic) - ПО для симуляции систем [Электронный
Специализированное программное обеспечение
VisSim 3.0 (Academic) - ПО для симуляции систем [Электронный
![Интернет- ресурсы Образовательный математический ресурс: [Электронный ресурс] – Режим доступа:](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/324654/slide-15.jpg)
Интернет- ресурсы
Образовательный математический ресурс:
[Электронный ресурс] – Режим доступа: www.exponenta.ru
Клиначёв Н.
Интернет- ресурсы
Образовательный математический ресурс:
[Электронный ресурс] – Режим доступа: www.exponenta.ru
Клиначёв Н.
Объем дисциплины и виды учебной работы
4 семестр
Лекции – 36 ч (18
Объем дисциплины и виды учебной работы
4 семестр
Лекции – 36 ч (18
Объем дисциплины и виды учебной работы
3 семестр
Лекции 4 ч
Практические занятия 2
Объем дисциплины и виды учебной работы
3 семестр
Лекции 4 ч
Практические занятия 2
Основные понятия и определения
Основные понятия и определения
Производственный процесс
Основой деятельности любого предприятия является производственный процесс, под которым понимают
Производственный процесс
Основой деятельности любого предприятия является производственный процесс, под которым понимают
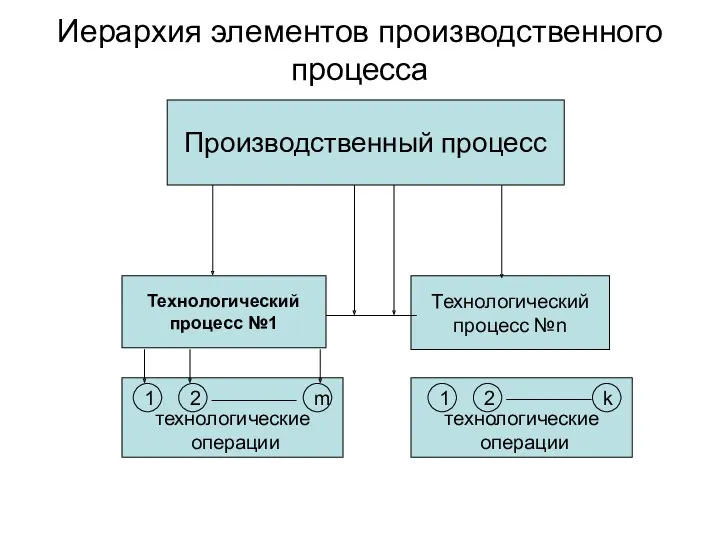
Иерархия элементов производственного процесса
Производственный процесс
Технологический
процесс №1
Технологический
процесс №n
технологические
операции
1
2
m
технологические
операции
k
2
1
Иерархия элементов производственного процесса
Производственный процесс
Технологический
процесс №1
Технологический
процесс №n
технологические
операции
1
2
m
технологические
операции
k
2
1
Технологический процесс – последовательность целенаправленных действий (операций) по получению из исходного
Технологический процесс – последовательность целенаправленных действий (операций) по получению из исходного
Технологические операции
условно можно разделить на рабочие операции и операции управления.
Рабочие операции
Технологические операции условно можно разделить на рабочие операции и операции управления. Рабочие операции
Механизация- замена человека в выполнении рабочих операций.
Автоматизация – замена человека в
Механизация- замена человека в выполнении рабочих операций. Автоматизация – замена человека в
Направления развития современного производства:
существенное улучшение качества продукции;
повышение производительности за счет технического
Направления развития современного производства:
существенное улучшение качества продукции;
повышение производительности за счет технического
Важнейшую роль для достижения высоких показателей в этих стратегических направлениях играет
Важнейшую роль для достижения высоких показателей в этих стратегических направлениях играет
Теория автоматического управления относится к числу научных дисциплин, образующих в совокупности
Теория автоматического управления относится к числу научных дисциплин, образующих в совокупности
Науки, изучающие вопросы автоматизации
Науки, изучающие вопросы автоматизации
Кибернетика – (от греческого слова искусство управления) наука об общих закономерностях
Кибернетика – (от греческого слова искусство управления) наука об общих закономерностях
Теория автоматического управления (ТАУ) – это наука о принципах построения и
Теория автоматического управления (ТАУ) – это наука о принципах построения и
История развития ТАУ
Первый автоматический регулятор был изобретен в 1765 г. И.И.Ползуновым.
История развития ТАУ
Первый автоматический регулятор был изобретен в 1765 г. И.И.Ползуновым.
Система автоматического регулирования уровня воды в котле
Система автоматического регулирования уровня воды в котле
Рассмотренные устройства не всегда работали удовлетворительно. Во многих случаях регулятор вместо
Рассмотренные устройства не всегда работали удовлетворительно. Во многих случаях регулятор вместо
Развитие научной теории
Основоположниками научной теории управления считаются Дж. Максвелл и профессор
Развитие научной теории
Основоположниками научной теории управления считаются Дж. Максвелл и профессор
Электромеханическая система автоматического регулирования уровня
H
Электромеханическая система автоматического регулирования уровня
H
Математические основы теории автоматического управления создавали на протяжении многих лет ученые
Математические основы теории автоматического управления создавали на протяжении многих лет ученые
Большой вклад в развитие теории автоматического управления внесли российские ученые: Н.Е.
Большой вклад в развитие теории автоматического управления внесли российские ученые: Н.Е.
В конце ХIX и начале ХХ вв. создаются новые виды электромеханических
В конце ХIX и начале ХХ вв. создаются новые виды электромеханических
После 1940 г. теория автоматического регулирования выделилась в самостоятельную науку. Были
После 1940 г. теория автоматического регулирования выделилась в самостоятельную науку. Были
Математические основы теории автоматического управления
Для успешного усвоения дисциплины необходимы знания многих
Математические основы теории автоматического управления
Для успешного усвоения дисциплины необходимы знания многих
Основные понятия и определения ТАУ
Процесс управления – совокупность операций управления.
Автоматическое управление
Основные понятия и определения ТАУ
Процесс управления – совокупность операций управления.
Автоматическое управление
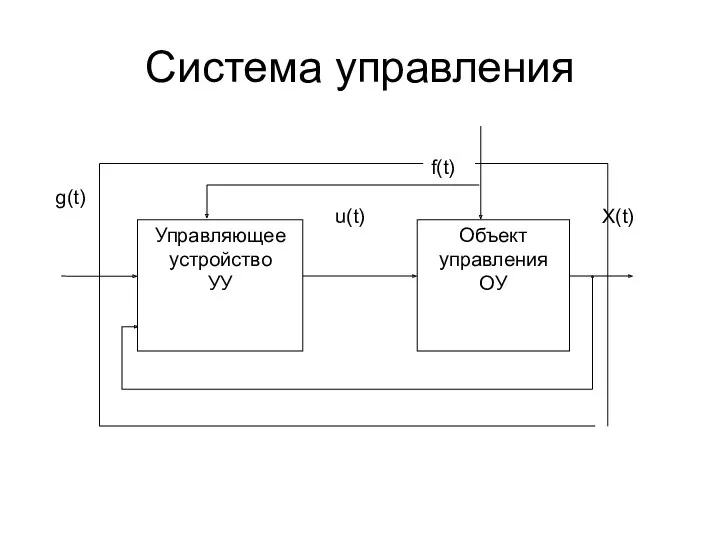
Система управления
Система управления
Объект управления или управляемый объект
Объект управления реализует процесс, который необходимо
Объект управления или управляемый объект
Объект управления реализует процесс, который необходимо
Объект управления одномерный
ОУ
u(t)
x(t)
f(t)
Объект управления одномерный
ОУ
u(t)
x(t)
f(t)
Объект управления многомерный
f1(t) fi(t) fk(t)
ОУ
U1(t)
Uj(t)
Um(t)
X1(t)
Xj(t)
Xm(t)
Объект управления многомерный
f1(t) fi(t) fk(t)
ОУ
U1(t)
Uj(t)
Um(t)
X1(t)
Xj(t)
Xm(t)
Переменные , определяющие поведение ОУ
x(t) - управляемая или выходная переменная
Переменные , определяющие поведение ОУ
x(t) - управляемая или выходная переменная
Переменные одномерных объектов представляют собой скаляры - x(t), u(t), f(t).
В случае
Переменные одномерных объектов представляют собой скаляры - x(t), u(t), f(t). В случае
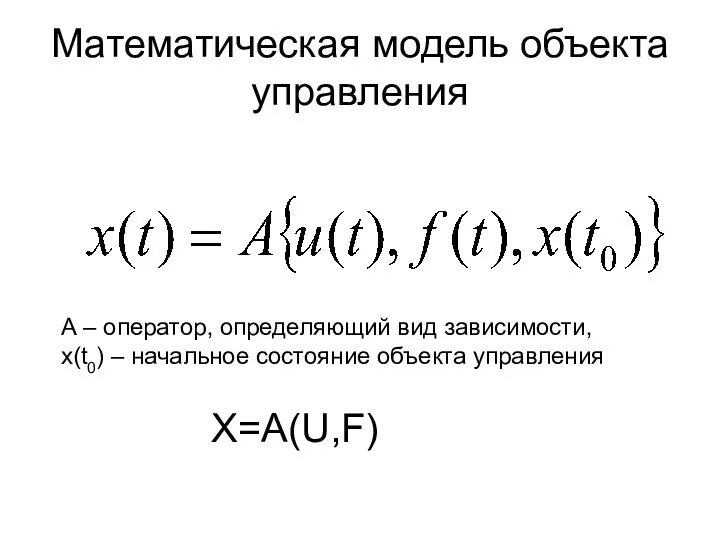
Математическая модель объекта управления
А – оператор, определяющий вид зависимости,
x(t0) –
Математическая модель объекта управления
А – оператор, определяющий вид зависимости,
x(t0) –
Объекты управления в большинстве обладают инерцией, т.е. изменение выходных координат под
Объекты управления в большинстве обладают инерцией, т.е. изменение выходных координат под
Объекты управления в зависимости от реакции на входные воздействия делятся на
Объекты управления в зависимости от реакции на входные воздействия делятся на
Определения
Устойчивым называется объект управления, у которого отклонение управляемой переменной x(t), вызванное
Определения
Устойчивым называется объект управления, у которого отклонение управляемой переменной x(t), вызванное
Управляющее устройство (УУ)
УУ – совокупность технических средств, предназначенных для управления
Управляющее устройство (УУ)
УУ – совокупность технических средств, предназначенных для управления
Управляющее устройство
УУ
g(t)
u(t)
f(t)
x(t)
Управляющее устройство
УУ
g(t)
u(t)
f(t)
x(t)
Входные и выходные переменные УУ
g(t) – задающее воздействие, внешнее воздействие, которое
Входные и выходные переменные УУ
g(t) – задающее воздействие, внешнее воздействие, которое
Функции управляющего устройства
1) получение информации о цели управления;
2) получение информации
Функции управляющего устройства
1) получение информации о цели управления;
2) получение информации
Первые две функции определяют информационный аспект управления;
третья и четвертая – алгоритмический;
пятая
Первые две функции определяют информационный аспект управления; третья и четвертая – алгоритмический; пятая
Функциональные элементы управляющего устройства
Измерительные (чувствительные) элементы (датчики)
Средства вычисления (регуляторы, контроллеры, компьютеры,
Функциональные элементы управляющего устройства
Измерительные (чувствительные) элементы (датчики)
Средства вычисления (регуляторы, контроллеры, компьютеры,
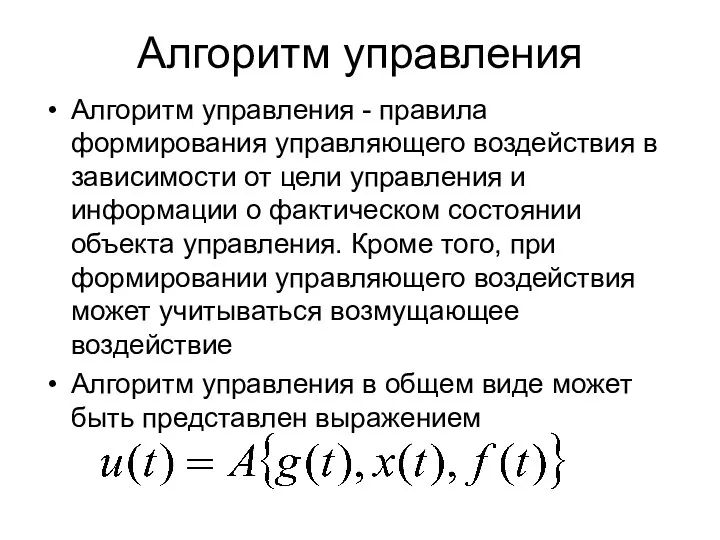
Алгоритм управления
Алгоритм управления - правила формирования управляющего воздействия в зависимости
Алгоритм управления
Алгоритм управления - правила формирования управляющего воздействия в зависимости
Алгоритм функционирования
Алгоритмом функционирования называется совокупность правил, предписаний или математических зависимостей, определяющих
Алгоритм функционирования
Алгоритмом функционирования называется совокупность правил, предписаний или математических зависимостей, определяющих

Функциональная схема системы автоматического регулирования
g(t)
e(t)
U(t)
X(t)
y(t)
f(t)
Функциональная схема системы автоматического регулирования
g(t)
e(t)
U(t)
X(t)
y(t)
f(t)
Состав функциональной схемы
ОУ – объект управления;
Д – датчик (чувствительный элемент, измерительный
Состав функциональной схемы
ОУ – объект управления;
Д – датчик (чувствительный элемент, измерительный
 Презентация-тест по теме Действия с информацией
Презентация-тест по теме Действия с информацией Объединение компьютеров в локальную сеть. Организация работы пользователей в локальных компьютерных сетях
Объединение компьютеров в локальную сеть. Организация работы пользователей в локальных компьютерных сетях Что умеет компьютер
Что умеет компьютер Image-based Rendering
Image-based Rendering Анимации в презентации
Анимации в презентации Управление проектом ИС агентства недвижимости Риэлтор
Управление проектом ИС агентства недвижимости Риэлтор Браузер, веб-обозреватель
Браузер, веб-обозреватель Общие сведения о языке программирования Паскаль
Общие сведения о языке программирования Паскаль Многообразие внешних устройств, подключаемых к компьютеру
Многообразие внешних устройств, подключаемых к компьютеру Эталонный банк данных правовой информации Республики Беларусь
Эталонный банк данных правовой информации Республики Беларусь Современные ИТ. Классификация современных ИТ
Современные ИТ. Классификация современных ИТ Лекция 6. Структура программы. Основные понятия языка. Система базовых типов. Операторы объявлений
Лекция 6. Структура программы. Основные понятия языка. Система базовых типов. Операторы объявлений Команди і виконавці команд. Урок 23. Я досліджую світ
Команди і виконавці команд. Урок 23. Я досліджую світ Отчет по лабораторным работам за семестр, по дисциплине:”Информатика”
Отчет по лабораторным работам за семестр, по дисциплине:”Информатика” Гашение сертификатов. Ветеринарные свидетельства, справки
Гашение сертификатов. Ветеринарные свидетельства, справки Администрирование информационных систем. Серверы имен. DNS, WINS
Администрирование информационных систем. Серверы имен. DNS, WINS Файл. Данные
Файл. Данные Циклдық синхрондаудың құрылуының жалпы принциптері
Циклдық синхрондаудың құрылуының жалпы принциптері Основы JDBC (Java DataBase Connectivity)
Основы JDBC (Java DataBase Connectivity) Мобильное приложение для ЮЛ и ИП. Мобильный бизнес клиент
Мобильное приложение для ЮЛ и ИП. Мобильный бизнес клиент Визуальное проектирование БД. Создание таблиц
Визуальное проектирование БД. Создание таблиц Сбор и группировка статистических данных. Частота
Сбор и группировка статистических данных. Частота Организация обмена данными
Организация обмена данными Залікова робота з предмету Основи КГ та Веб-дизайну
Залікова робота з предмету Основи КГ та Веб-дизайну Потоки и файлы. Часть 2 Работа с файлами
Потоки и файлы. Часть 2 Работа с файлами Відповіді на питання до курсу “Операційні системи”
Відповіді на питання до курсу “Операційні системи” Профессия: Оператор компьютерного набора
Профессия: Оператор компьютерного набора Запросы СУБД Microsoft Access
Запросы СУБД Microsoft Access