- История развития робототехники

Содержание
- 2. История робототехники неразрывно связана с большинством изобретений, сделанных человечеством. Практически невозможно отделить ее от истории развития
- 3. Своим названием роботы обязаны совсем не кибернетикам и даже не инженерам, а... писателю. Это Карел Чапек
- 4. С ДРЕВНОСТИ до XVI ВЕКА Середина III тыс. до н. э. Египтяне изобретают идею думающих машин:
- 5. XVII - XVIII ВЕКА В 1617 году Шотландский лорд Джон Непер (John Napier) создает приспособление для
- 6. XIX ВЕК В 1800 году Алессандро Вольта (Alessandro Volta) создает электрические батареи. В 1807 году Генри
- 7. ХХ ВЕК В 1913 году Чарльз Маколи (Charles P. R. Macaulay) конструирует логическую машину для решения
- 8. Наши дни Кевин Уорвик (Kevin Warwick) в Орегонском университете создает первого киборга (кибернетический организм). В небольшой
- 9. Январь 2002 год Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен на рынок шведской компанией
- 10. Сентябрь 2003 год На выставке Sony Dream World 2003 представлен робот QRIO, ранее известный под именем
- 11. Февраль 2004 год Toyota объявила о проекте «Роботы-помощники». Цель компании - создание роботов, обладающих человеческими характеристиками.
- 12. Октябрь 2005 год Компанией iRobot совместно с Центром фотоники Бостонского университета представлен робот PackBot с системой
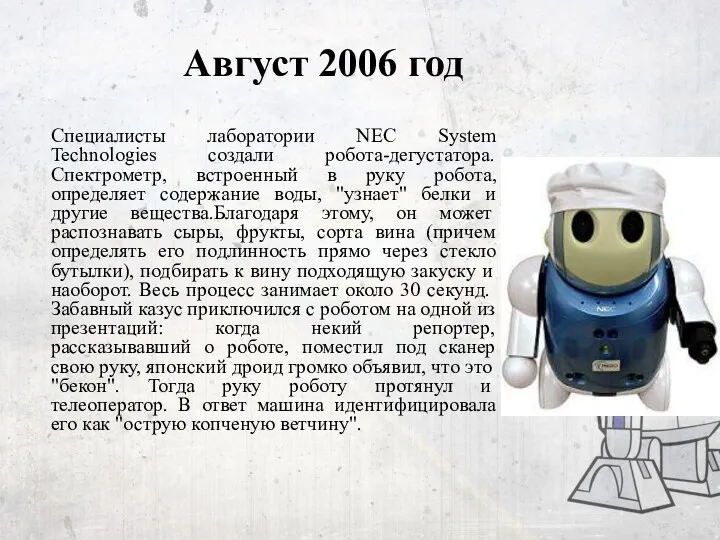
- 13. Август 2006 год Специалисты лаборатории NEC System Technologies создали робота-дегустатора. Спектрометр, встроенный в руку робота, определяет
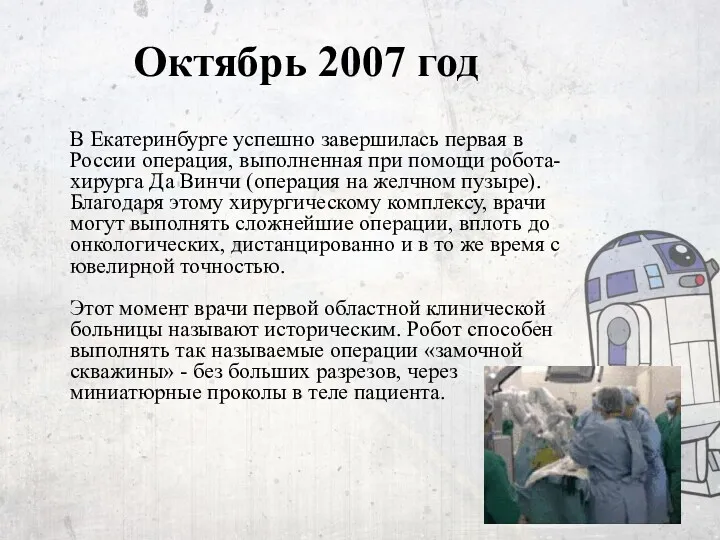
- 14. Октябрь 2007 год В Екатеринбурге успешно завершилась первая в России операция, выполненная при помощи робота-хирурга Да
- 15. Норвежский специалист робототехники Каре Халворсен (Kare Halvorsen aka. Zenta) воплотил в реальность мечты всех любителей фантастики.
- 16. Направления робототехники Промышленные роботы. Военные и космические роботы. Бытовые роботы. Андроиды.
- 17. Промышленные роботы
- 18. Военные и космические роботы
- 19. Бытовые роботы
- 20. Андроиды
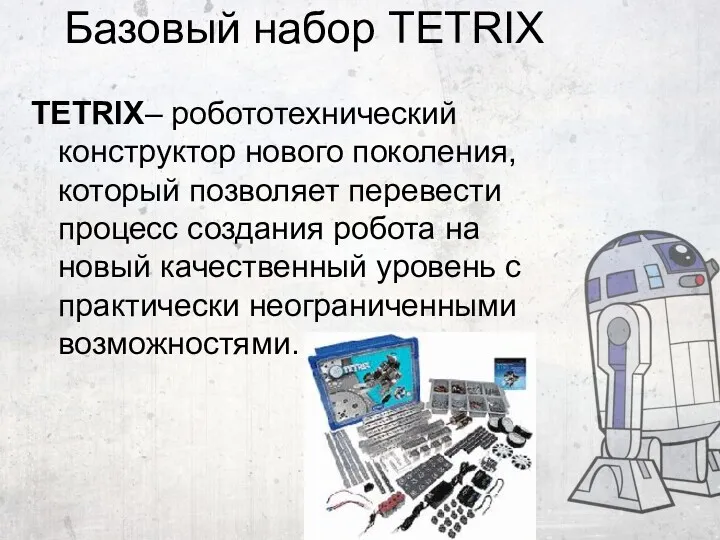
- 22. Базовый набор TETRIX TETRIX– робототехнический конструктор нового поколения, который позволяет перевести процесс создания робота на новый
- 24. Скачать презентацию

История робототехники неразрывно связана с большинством изобретений, сделанных человечеством. Практически невозможно
История робототехники неразрывно связана с большинством изобретений, сделанных человечеством. Практически невозможно

Своим названием роботы обязаны совсем не кибернетикам и даже не инженерам,
С ДРЕВНОСТИ до XVI ВЕКА
Середина III тыс. до н. э.
Египтяне изобретают
С ДРЕВНОСТИ до XVI ВЕКА
Середина III тыс. до н. э.
Египтяне изобретают
XVII - XVIII ВЕКА
В 1617 году
Шотландский лорд Джон Непер (John Napier)
XVII - XVIII ВЕКА
В 1617 году
Шотландский лорд Джон Непер (John Napier)
XIX ВЕК
В 1800 году
Алессандро Вольта (Alessandro Volta) создает электрические батареи.
В 1807
XIX ВЕК
В 1800 году
Алессандро Вольта (Alessandro Volta) создает электрические батареи.
В 1807
ХХ ВЕК
В 1913 году
Чарльз Маколи (Charles P. R. Macaulay) конструирует логическую
ХХ ВЕК
В 1913 году
Чарльз Маколи (Charles P. R. Macaulay) конструирует логическую
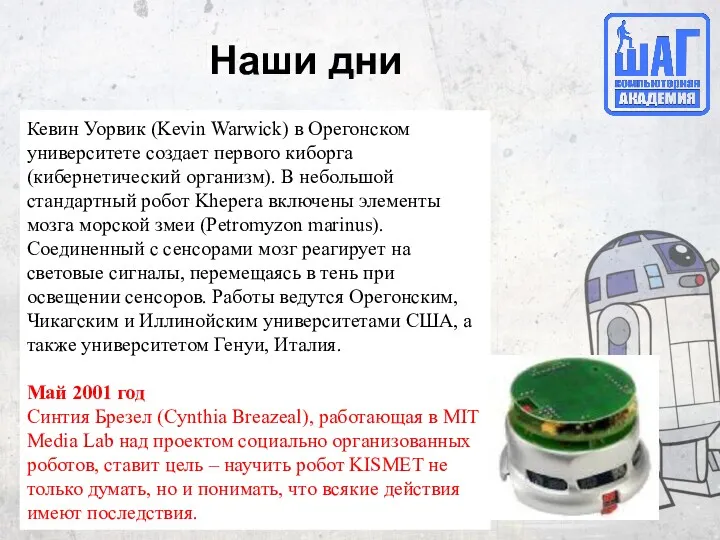
Наши дни
Кевин Уорвик (Kevin Warwick) в Орегонском университете создает первого
Наши дни
Кевин Уорвик (Kevin Warwick) в Орегонском университете создает первого
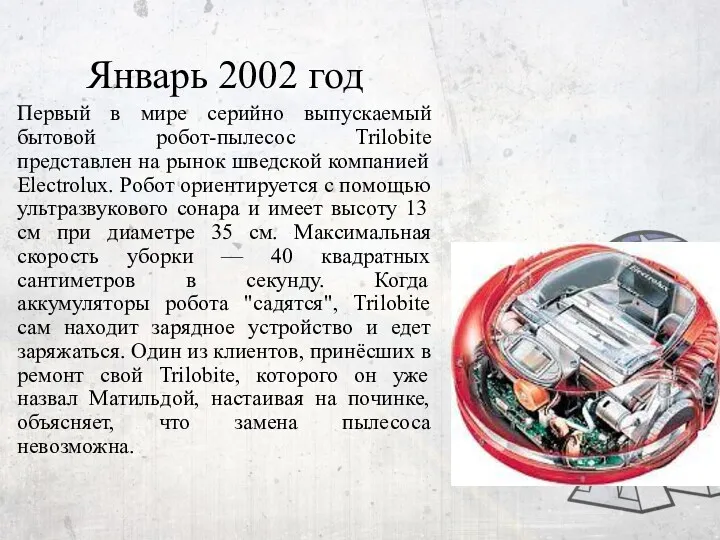
Январь 2002 год
Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен
Январь 2002 год
Первый в мире серийно выпускаемый бытовой робот-пылесос Trilobite представлен
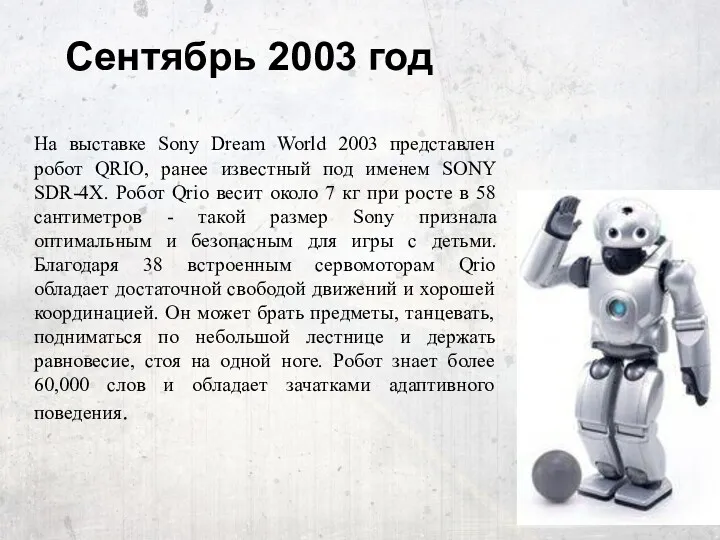
Сентябрь 2003 год
На выставке Sony Dream World 2003 представлен робот QRIO,
Сентябрь 2003 год
На выставке Sony Dream World 2003 представлен робот QRIO,

Февраль 2004 год
Toyota объявила о проекте «Роботы-помощники». Цель компании - создание
Февраль 2004 год
Toyota объявила о проекте «Роботы-помощники». Цель компании - создание
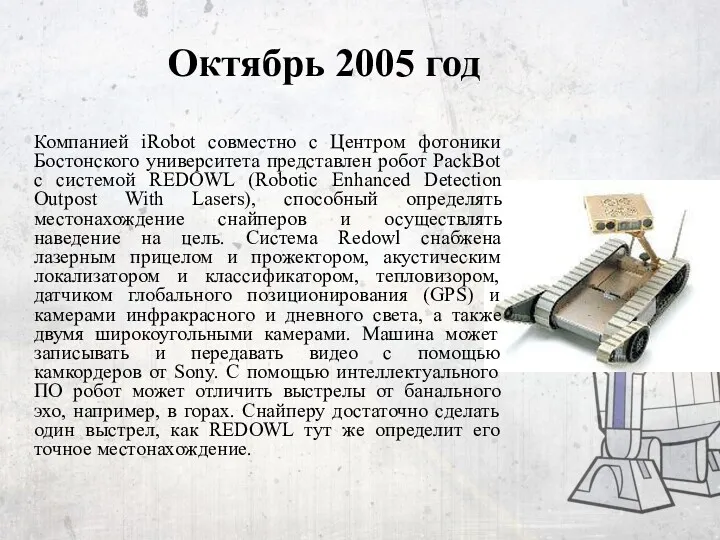
Октябрь 2005 год
Компанией iRobot совместно с Центром фотоники Бостонского университета представлен
Октябрь 2005 год
Компанией iRobot совместно с Центром фотоники Бостонского университета представлен
Август 2006 год
Специалисты лаборатории NEC System Technologies создали робота-дегустатора. Спектрометр,
Август 2006 год
Специалисты лаборатории NEC System Technologies создали робота-дегустатора. Спектрометр,
Октябрь 2007 год
В Екатеринбурге успешно завершилась первая в России операция, выполненная
Октябрь 2007 год
В Екатеринбурге успешно завершилась первая в России операция, выполненная
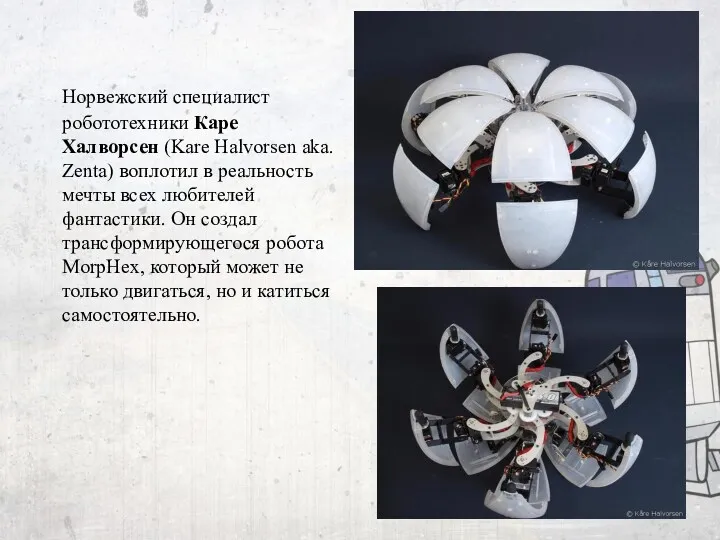
Норвежский специалист робототехники Каре Халворсен (Kare Halvorsen aka. Zenta) воплотил в реальность
Норвежский специалист робототехники Каре Халворсен (Kare Halvorsen aka. Zenta) воплотил в реальность
Направления робототехники
Промышленные роботы.
Военные и космические роботы.
Бытовые роботы.
Андроиды.
Направления робототехники
Промышленные роботы.
Военные и космические роботы.
Бытовые роботы.
Андроиды.

Промышленные роботы
Промышленные роботы

Военные и космические роботы
Военные и космические роботы

Бытовые роботы
Бытовые роботы

Андроиды
Андроиды
Базовый набор TETRIX
TETRIX– робототехнический конструктор нового поколения, который позволяет перевести процесс
Базовый набор TETRIX
TETRIX– робототехнический конструктор нового поколения, который позволяет перевести процесс
 Авторитарные режимы в Европе
Авторитарные режимы в Европе Культура Галицько-Волинської держави. Макет давнього міста Галич
Культура Галицько-Волинської держави. Макет давнього міста Галич Боль моей души - Афганистан
Боль моей души - Афганистан Современная политическая карта мира
Современная политическая карта мира Конспект урока по истории древнего мира 5 класс. Тема Древнейшие люди+презентация
Конспект урока по истории древнего мира 5 класс. Тема Древнейшие люди+презентация День славянской письменности и культуры
День славянской письменности и культуры История изобретения паровых машин
История изобретения паровых машин The Walt Disney studios history
The Walt Disney studios history История подвижных игр
История подвижных игр Становление и развитие земельного права в России. 1960-2002 годы
Становление и развитие земельного права в России. 1960-2002 годы Государственные праздники Российской Федерации
Государственные праздники Российской Федерации Пилип Орлик та його Конституція
Пилип Орлик та його Конституція Реформы 1860 - 1870 - х годов. Социальная и правовая модернизация
Реформы 1860 - 1870 - х годов. Социальная и правовая модернизация Мировой экономический кризис (1929-1932)
Мировой экономический кризис (1929-1932) Гражданская война в США
Гражданская война в США Исторические и социокультурные особенности становления и развития образования в России. Образование в допетровской Руси
Исторические и социокультурные особенности становления и развития образования в России. Образование в допетровской Руси Коренной перелом. Курская битва 5 июля – 23 августа 1943 года
Коренной перелом. Курская битва 5 июля – 23 августа 1943 года Soyons fiers de n
Soyons fiers de n Polskie legendy
Polskie legendy Чернобыльская трагедия
Чернобыльская трагедия К 75-летию Победы
К 75-летию Победы Выдающиеся архитектурные сооружения и памятники всех времен и народов
Выдающиеся архитектурные сооружения и памятники всех времен и народов Культура и повседневная жизнь народов России в XVIв
Культура и повседневная жизнь народов России в XVIв Известные люди города Вологды
Известные люди города Вологды Особливості середньовічноі архітектури. Романський стиль
Особливості середньовічноі архітектури. Романський стиль There are a lot of museums in London
There are a lot of museums in London Культурное пространство империи второй половины XIX века, достижения российской науки и образования
Культурное пространство империи второй половины XIX века, достижения российской науки и образования Известные люди, связанные с городом Тулой
Известные люди, связанные с городом Тулой