- Методы и средства распознавания образов и визуализации

Содержание
- 2. Распознавание Под распознаванием мы понимаем «отнесение исследуемого объекта, задаваемого в виде совокупности наблюдений, к одному из
- 3. Направления в области распознавания В настоящий момент существуют три основных направления в области распознавания: 1. Распознавание
- 4. Выявление характерных точек Как правило, выявление характерных точек на изображении включает следующие основные этапы: Получение нормализованного
- 5. Применение фильтров Габора В 1946 г. Д. Габор предложил подход, описывающий некоторую временную функцию, с одновременным
- 6. Применение фильтров Габора Упорядоченная группа таких фильтров, используемых с разными параметрами, часто называется Габоровскими вейвлетами. Окрестность,
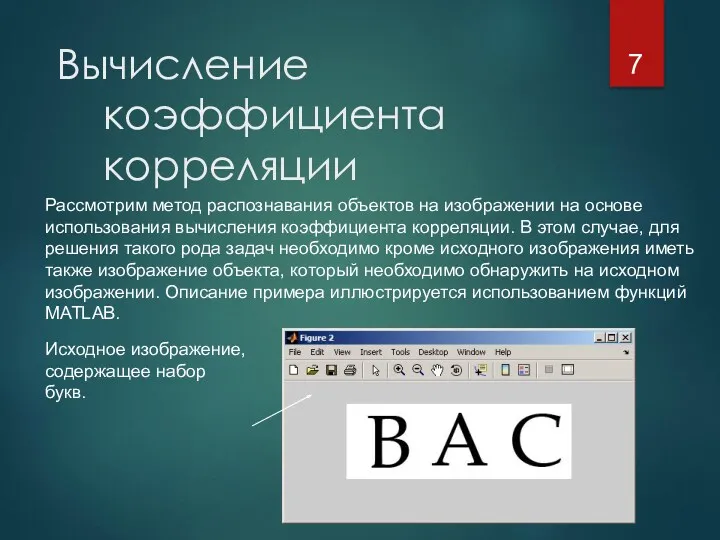
- 7. Вычисление коэффициента корреляции Рассмотрим метод распознавания объектов на изображении на основе использования вычисления коэффициента корреляции. В
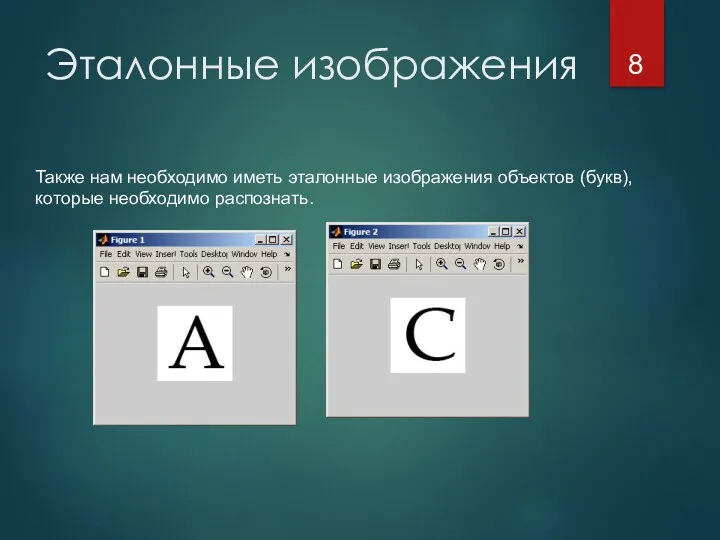
- 8. Эталонные изображения Также нам необходимо иметь эталонные изображения объектов (букв), которые необходимо распознать.
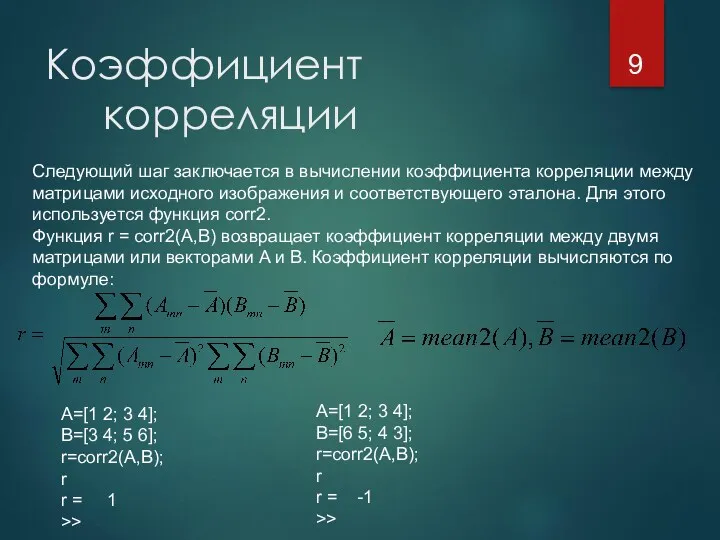
- 9. Коэффициент корреляции Следующий шаг заключается в вычислении коэффициента корреляции между матрицами исходного изображения и соответствующего эталона.
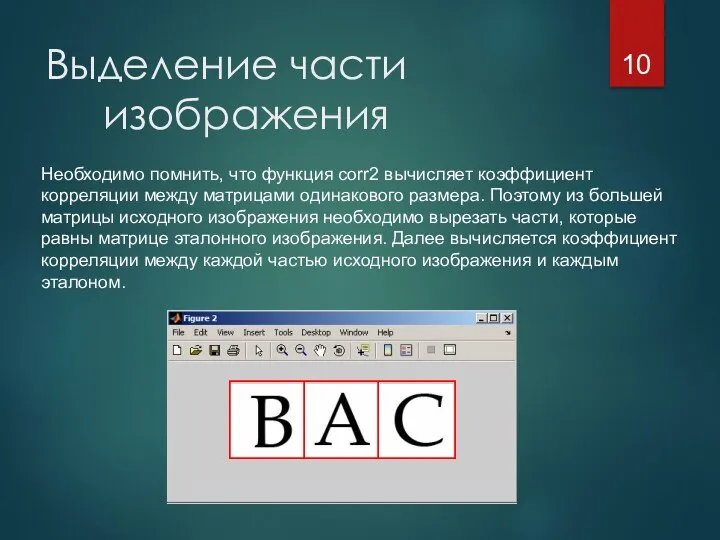
- 10. Выделение части изображения Необходимо помнить, что функция corr2 вычисляет коэффициент корреляции между матрицами одинакового размера. Поэтому
- 11. Коэффициент корреляции Итак, коэффициент корреляции между первым эталоном (буква А) и исходным изображением вычисляется следующим образом.
- 12. Коэффициент корреляции Расположение максимума коэффициента корреляции свидетельствует о том, что эта часть исходного изображения максимально похожа
- 13. Распознавание номерных знаков автомобилей При решении задачи распознавания номерных знаков автомобилей можно выделить два этапа: локализация
- 14. Преобразование изображения в оттенки серого I=imread('inputimage.bmp'); figure,imshow(I); I=rgb2gray(I);figure, imshow(I);
- 15. Фильтрация шумов Для устранения импульсных выбросов используется медианная фильтрация. for i=1:N; for j=1:M-2; I(i,j)=median(median(I(i,j:j+2))); end; end;
- 16. Фильтр повышения резкости 'unsharp' Фильтр, повышающий резкость изображения, имеет маску, определяемую следующим выражением: где параметр a
- 17. Выравнивание гистограммы Функция histeq улучшает контраст изображения с помощью преобразования значений пикселей исходного изображения таким образом,
- 18. Определение расположения номерного знака на изображении После проведения предварительной обработки изображения необходимо определить расположение номерного знака.
- 19. Функция BWLABEL Функция [L, num]=bwlabel(BW, n) дополнительно в параметр num возвращает количество объектов, найденных на изображении
- 20. Визуализация найденного массива координат объектов feats=imfeature(L,'Centroid','Extent',8); Extent=zeros(num); CentX=zeros(num); CentY=zeros(num); for i=1:1:num; Extent(i)=feats(i).Extent; CentX(i)=feats(i).Centroid(1); CentY(i)=feats(i).Centroid(2); %text(CentX(i),CentY(i),'x','Color',[1 0
- 21. Выделение номерного знака на изображении I=imread('217670.jpg'); I =rgb2gray(I); bw = im2bw(I,0.6); imshow(bw) L = bwlabel(bw); %L
- 22. Распознавание символов После локализации номерного знака на изображении, выполняется второй этап – распознавание символов. Для этого
- 23. Поиск по эталону
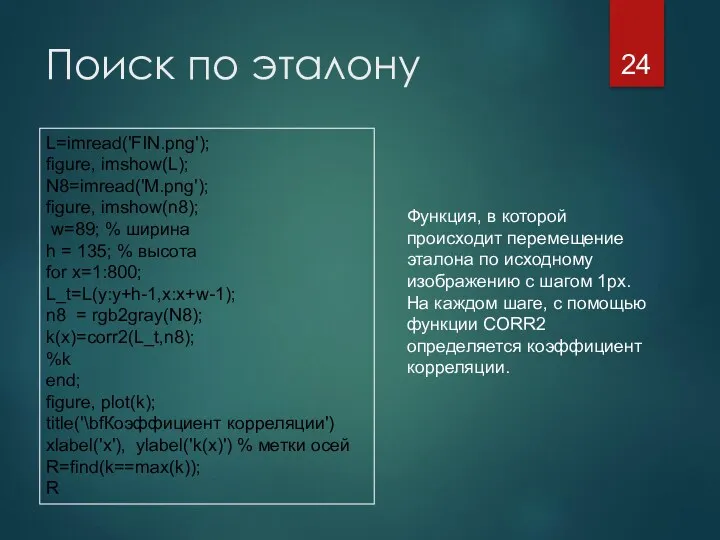
- 24. Поиск по эталону L=imread('FIN.png'); figure, imshow(L); N8=imread('M.png'); figure, imshow(n8); w=89; % ширина h = 135; %
- 25. Поиск по эталону Коэффициента корреляции между матрицами исследуемого изображения и соответствующего эталона
- 26. Обнаружение лиц на изображении Проблема автоматического выделения объектов заданного класса на цифровых визуальных изображениях актуальна для
- 27. Методы обнаружения лиц на изображениях За последние несколько лет было предложено множество алгоритмов обнаружения лиц, использующих
- 28. Библиотека компьютерного зрения OpenCV OpenCV (англ. Open Source Computer Vision Library, библиотека компьютерного зрения с открытым
- 29. Код программы using (Image image = new Image ("faces.jpg")) //Read the image as a Bgr 8-bit
- 30. Результат выполнения программы
- 32. Скачать презентацию
Распознавание
Под распознаванием мы понимаем «отнесение исследуемого объекта, задаваемого в виде совокупности
Распознавание
Под распознаванием мы понимаем «отнесение исследуемого объекта, задаваемого в виде совокупности
Направления в области распознавания
В настоящий момент существуют три основных
Направления в области распознавания
В настоящий момент существуют три основных
Выявление характерных точек
Как правило, выявление характерных точек на изображении включает
Выявление характерных точек
Как правило, выявление характерных точек на изображении включает
Применение фильтров Габора
В 1946 г. Д. Габор предложил подход, описывающий некоторую
Применение фильтров Габора
В 1946 г. Д. Габор предложил подход, описывающий некоторую

Применение фильтров Габора
Упорядоченная группа таких фильтров, используемых с разными параметрами, часто
Применение фильтров Габора
Упорядоченная группа таких фильтров, используемых с разными параметрами, часто
Вычисление коэффициента корреляции
Рассмотрим метод распознавания объектов на изображении на
Вычисление коэффициента корреляции
Рассмотрим метод распознавания объектов на изображении на
Эталонные изображения
Также нам необходимо иметь эталонные изображения объектов (букв), которые
Эталонные изображения
Также нам необходимо иметь эталонные изображения объектов (букв), которые
Коэффициент корреляции
Следующий шаг заключается в вычислении коэффициента корреляции между матрицами
Коэффициент корреляции
Следующий шаг заключается в вычислении коэффициента корреляции между матрицами
Выделение части изображения
Необходимо помнить, что функция corr2 вычисляет коэффициент корреляции
Выделение части изображения
Необходимо помнить, что функция corr2 вычисляет коэффициент корреляции
Коэффициент корреляции
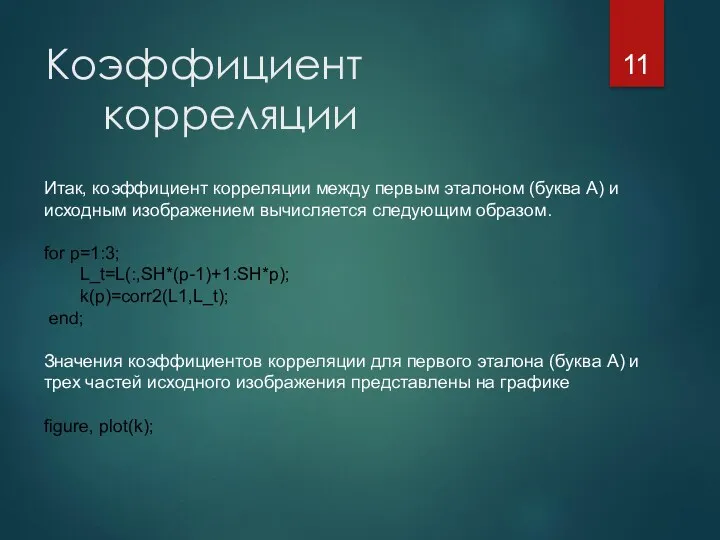
Итак, коэффициент корреляции между первым эталоном (буква А) и
Коэффициент корреляции
Итак, коэффициент корреляции между первым эталоном (буква А) и
Коэффициент корреляции
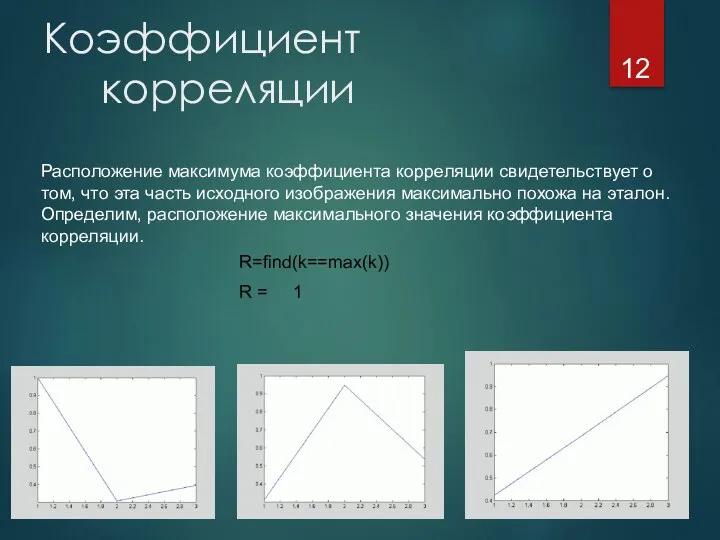
Расположение максимума коэффициента корреляции свидетельствует о том, что эта
Коэффициент корреляции
Расположение максимума коэффициента корреляции свидетельствует о том, что эта
Распознавание номерных знаков автомобилей
При решении задачи распознавания номерных знаков автомобилей можно
Распознавание номерных знаков автомобилей
При решении задачи распознавания номерных знаков автомобилей можно
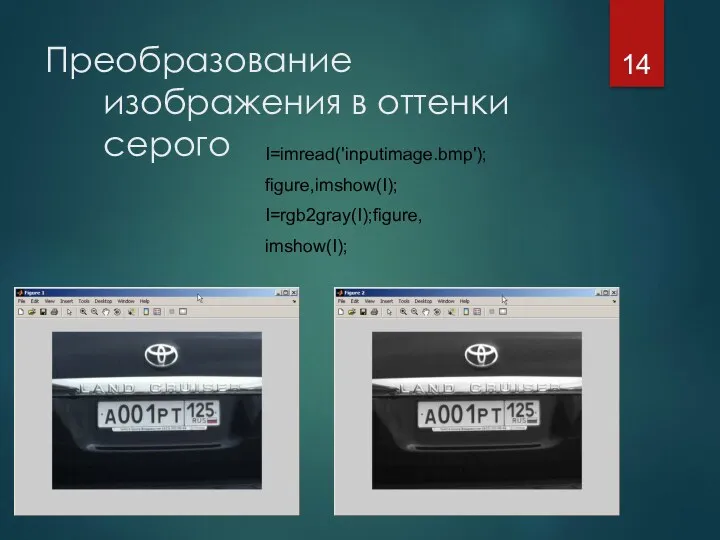
Преобразование изображения в оттенки серого
I=imread('inputimage.bmp');
figure,imshow(I);
I=rgb2gray(I);figure,
imshow(I);
Преобразование изображения в оттенки серого
I=imread('inputimage.bmp');
figure,imshow(I);
I=rgb2gray(I);figure,
imshow(I);
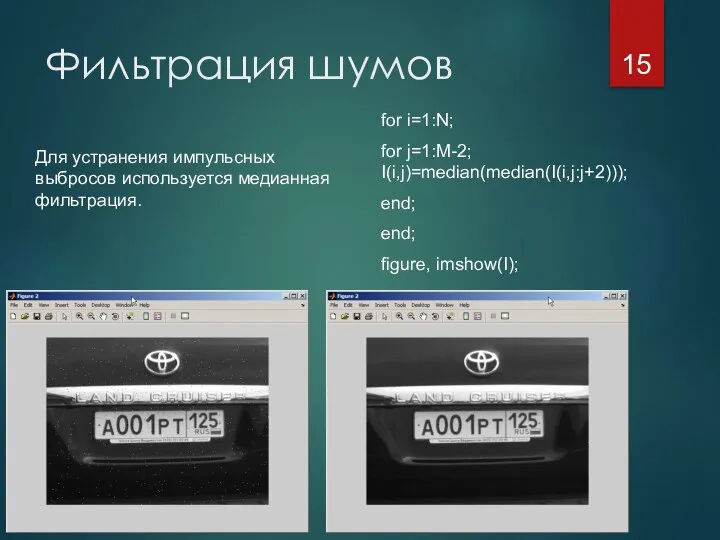
Фильтрация шумов
Для устранения импульсных выбросов используется медианная фильтрация.
for i=1:N;
for j=1:M-2;
Фильтрация шумов
Для устранения импульсных выбросов используется медианная фильтрация.
for i=1:N;
for j=1:M-2;
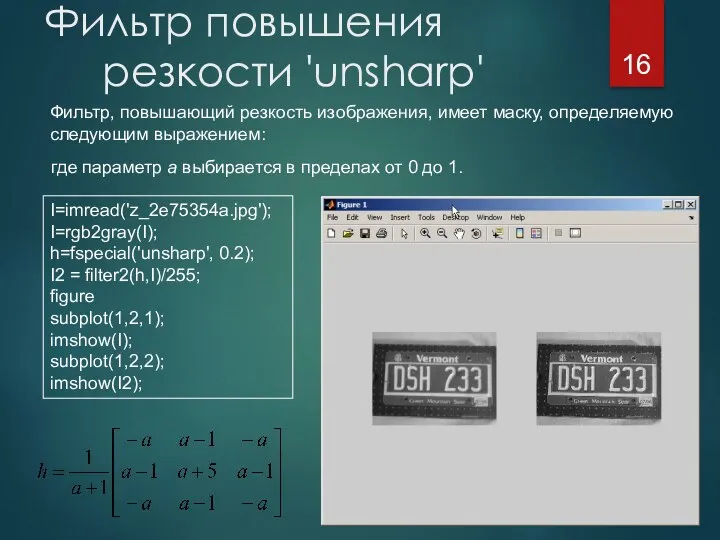
Фильтр повышения резкости 'unsharp'
Фильтр, повышающий резкость изображения, имеет маску, определяемую следующим
Фильтр повышения резкости 'unsharp'
Фильтр, повышающий резкость изображения, имеет маску, определяемую следующим
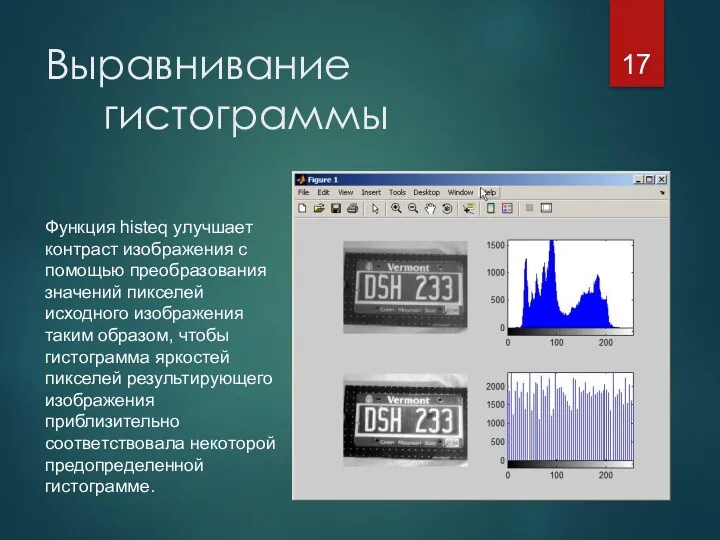
Выравнивание гистограммы
Функция histeq улучшает контраст изображения с помощью преобразования значений пикселей
Выравнивание гистограммы
Функция histeq улучшает контраст изображения с помощью преобразования значений пикселей
Определение расположения номерного знака на изображении
После проведения предварительной обработки изображения необходимо
Определение расположения номерного знака на изображении
После проведения предварительной обработки изображения необходимо
![Функция BWLABEL Функция [L, num]=bwlabel(BW, n) дополнительно в параметр num](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/317164/slide-18.jpg)
Функция BWLABEL
Функция [L, num]=bwlabel(BW, n) дополнительно в параметр num возвращает
Функция BWLABEL
Функция [L, num]=bwlabel(BW, n) дополнительно в параметр num возвращает
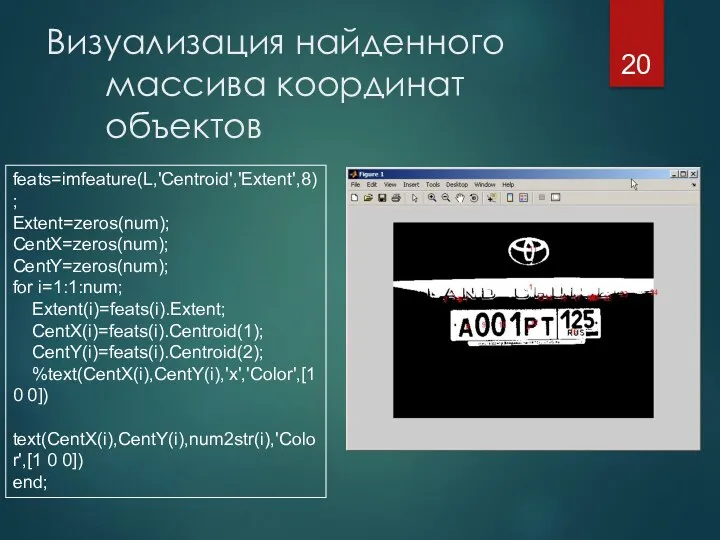
Визуализация найденного массива координат объектов
feats=imfeature(L,'Centroid','Extent',8);
Extent=zeros(num);
CentX=zeros(num);
CentY=zeros(num);
for i=1:1:num;
Extent(i)=feats(i).Extent;
CentX(i)=feats(i).Centroid(1);
CentY(i)=feats(i).Centroid(2);
%text(CentX(i),CentY(i),'x','Color',[1
Визуализация найденного массива координат объектов
feats=imfeature(L,'Centroid','Extent',8);
Extent=zeros(num);
CentX=zeros(num);
CentY=zeros(num);
for i=1:1:num;
Extent(i)=feats(i).Extent;
CentX(i)=feats(i).Centroid(1);
CentY(i)=feats(i).Centroid(2);
%text(CentX(i),CentY(i),'x','Color',[1
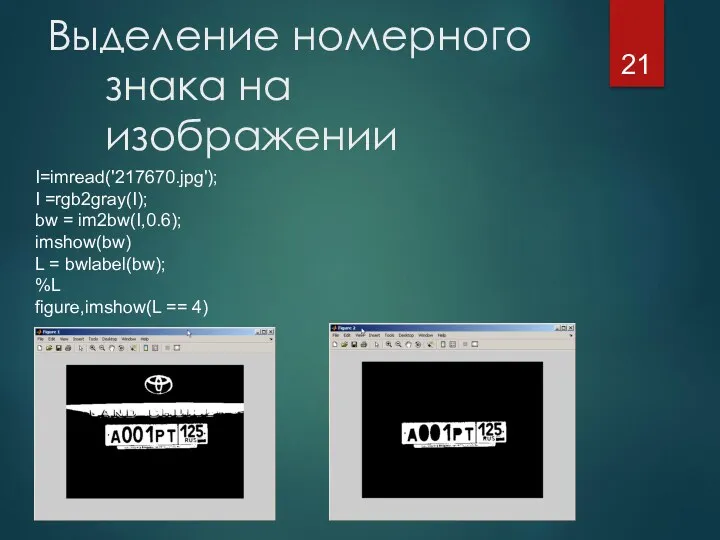
Выделение номерного знака на изображении
I=imread('217670.jpg');
I =rgb2gray(I);
bw = im2bw(I,0.6);
imshow(bw)
L = bwlabel(bw);
%L
figure,imshow(L
Выделение номерного знака на изображении
I=imread('217670.jpg');
I =rgb2gray(I);
bw = im2bw(I,0.6);
imshow(bw)
L = bwlabel(bw);
%L
figure,imshow(L
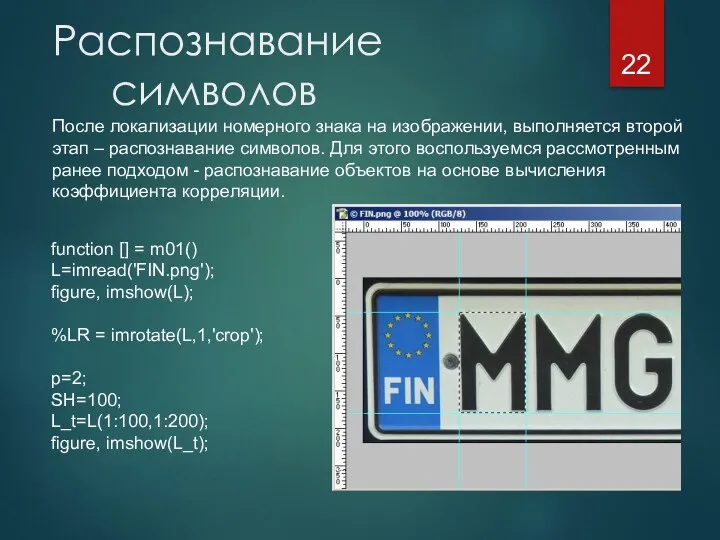
Распознавание символов
После локализации номерного знака на изображении, выполняется второй этап –
Распознавание символов
После локализации номерного знака на изображении, выполняется второй этап –
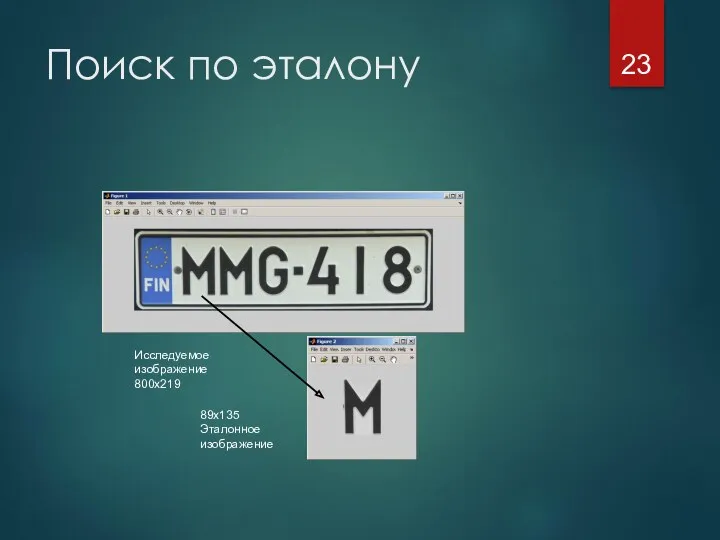
Поиск по эталону
Поиск по эталону
Поиск по эталону
L=imread('FIN.png');
figure, imshow(L);
N8=imread('M.png');
figure, imshow(n8);
w=89; % ширина
h = 135; %
Поиск по эталону
L=imread('FIN.png');
figure, imshow(L);
N8=imread('M.png');
figure, imshow(n8);
w=89; % ширина
h = 135; %
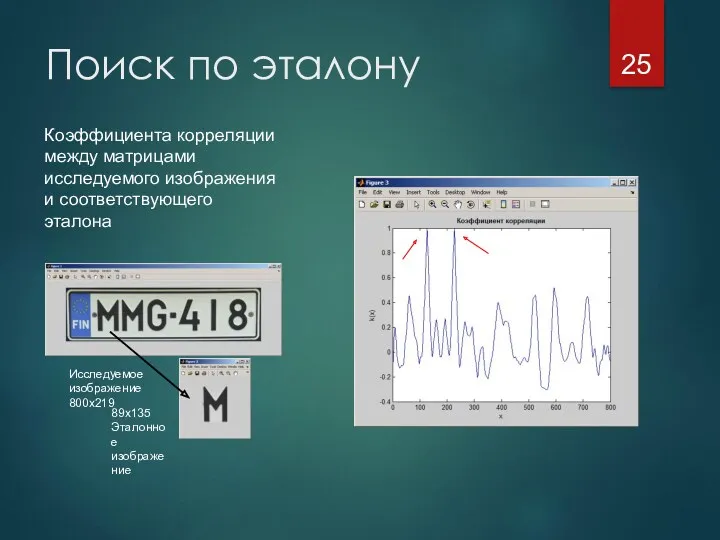
Поиск по эталону
Коэффициента корреляции между матрицами исследуемого изображения и соответствующего эталона
Поиск по эталону
Коэффициента корреляции между матрицами исследуемого изображения и соответствующего эталона
Обнаружение лиц на изображении
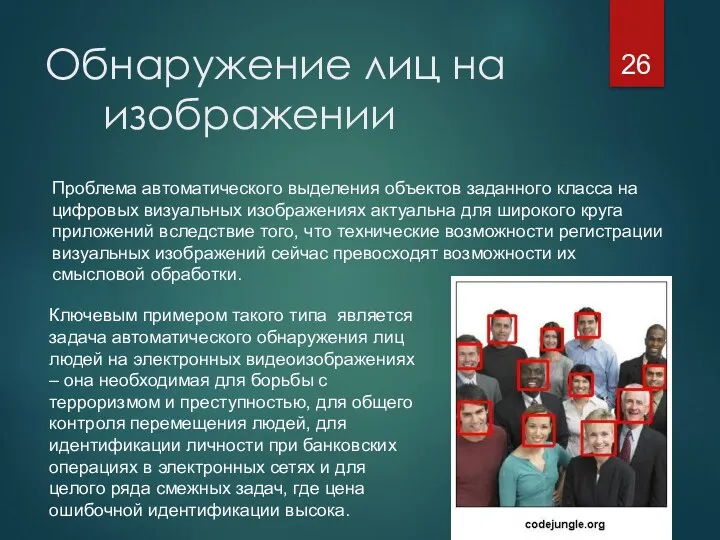
Проблема автоматического выделения объектов заданного класса на цифровых
Обнаружение лиц на изображении
Проблема автоматического выделения объектов заданного класса на цифровых
Методы обнаружения лиц на изображениях
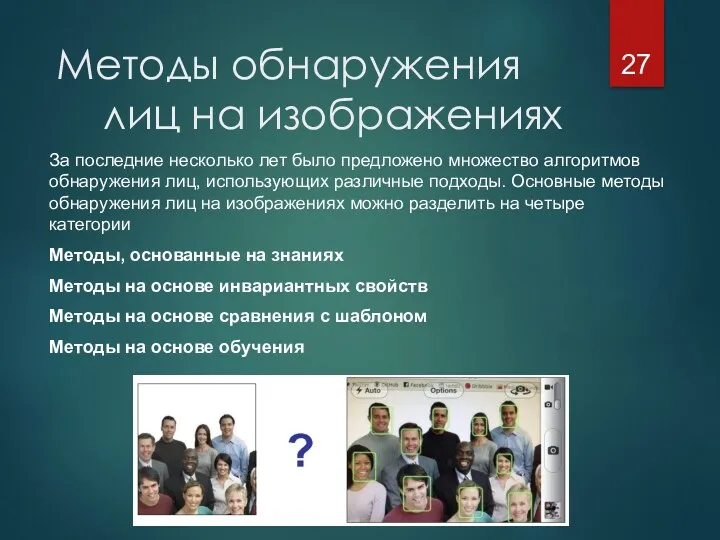
За последние несколько лет было
Методы обнаружения лиц на изображениях
За последние несколько лет было
Библиотека компьютерного зрения OpenCV
OpenCV (англ. Open Source Computer Vision Library, библиотека компьютерного
Библиотека компьютерного зрения OpenCV
OpenCV (англ. Open Source Computer Vision Library, библиотека компьютерного
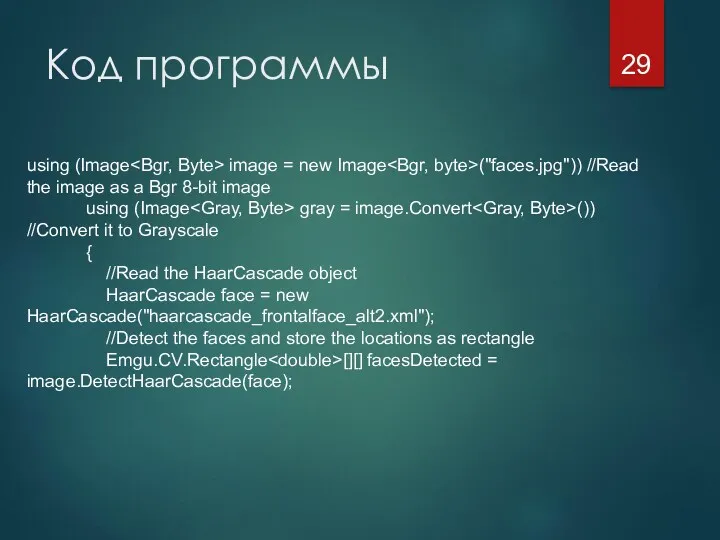
Код программы
using (Image image = new Image("faces.jpg")) //Read the
Код программы
using (Image
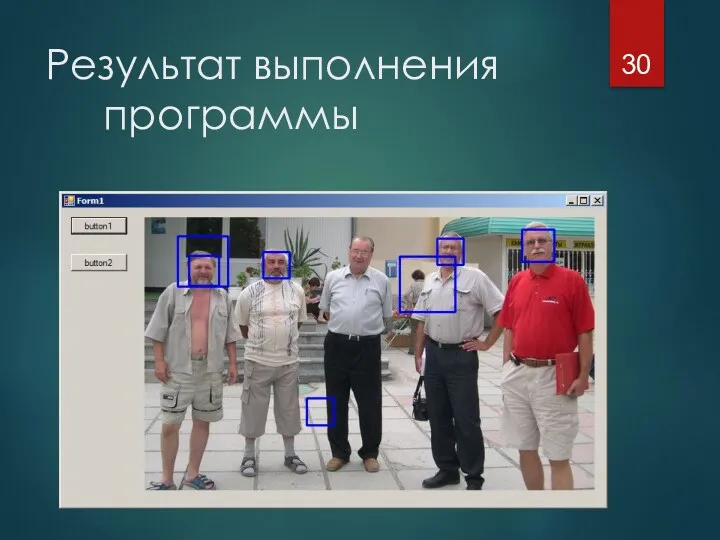
Результат выполнения программы
Результат выполнения программы
 Имидж делового мужчины
Имидж делового мужчины Как приручить дракона
Как приручить дракона Государственные символы России
Государственные символы России Символізм у художньому мистецтві
Символізм у художньому мистецтві Вишиванка у моєму житті
Вишиванка у моєму житті Классификация материалов, используемых в изобразительном искусстве и дизайне
Классификация материалов, используемых в изобразительном искусстве и дизайне Сценография, как особый вид художественного творчества. Для обучающихся в детских творческих коллективах
Сценография, как особый вид художественного творчества. Для обучающихся в детских творческих коллективах Народні символи України
Народні символи України Образец экзаменационной презентации
Образец экзаменационной презентации Творческий путь художников-модельеров Виталия Куракова и Татьяны Коротковой
Творческий путь художников-модельеров Виталия Куракова и Татьяны Коротковой Сообщество фурри
Сообщество фурри 15 мультфильмов из СССР, которые нужно показать детям
15 мультфильмов из СССР, которые нужно показать детям Культура Древнего Китая
Культура Древнего Китая Работа школьных музеев
Работа школьных музеев Самые необычные музеи мира
Самые необычные музеи мира Весна на картинах художников
Весна на картинах художников Художественная Фотография
Художественная Фотография Пам'ятники Сумщини
Пам'ятники Сумщини Нужна ли музыка в театре, кино и телепередачах?
Нужна ли музыка в театре, кино и телепередачах? Портрет. Отрисовка полного портрета
Портрет. Отрисовка полного портрета Рок-стиль в одежде
Рок-стиль в одежде Жив ли мегалодон
Жив ли мегалодон Правила линейной и воздушной перспективы
Правила линейной и воздушной перспективы Про деда мороза
Про деда мороза Базовые техники окрашивания
Базовые техники окрашивания Architectural monuments and memorials of India
Architectural monuments and memorials of India Мақал-мәтелдердің этномәдени сипаты
Мақал-мәтелдердің этномәдени сипаты Ёлочка, красавица. Откуда у ёлки прекрасный наряд
Ёлочка, красавица. Откуда у ёлки прекрасный наряд