- Математические схемы моделирования в электротехнике

Содержание
- 2. Математические схемы Введение понятия "математическая схема" позволяет рассматривать математику не как метод расчета, а как метод
- 3. Каждая конкретная система S характеризуется набором свойств, под которыми понимаются величины, отражающие поведение моделируемого объекта (реальной
- 4. При этом в перечисленных подмножествах можно выделить управляемые и неуправляемые переменные. В общем случае хi, υl,
- 5. Совокупность зависимостей выходных характеристик системы от времени уj(t) для всех видов j = 1, nY называется
- 6. Типовые схемы. Приведенные математические соотношения представляют собой математические схемы общего вида и позволяют описать широкий класс
- 7. Перечисленные типовые математические схемы, естественно, не могут претендовать на возможность описания на их базе всех процессов,
- 8. НЕПРЕРЫВНО-ДЕТЕРМИНИРОВАННЫЕ МОДЕЛИ (D-СХЕМЫ) Рассмотрим особенности непрерывно-детерминированного подхода на примере использования в качестве математических моделей дифференциальных уравнений.
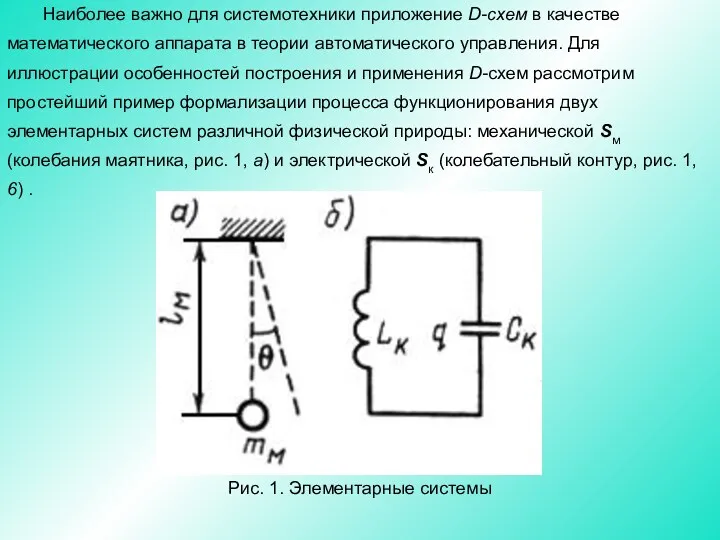
- 9. Наиболее важно для системотехники приложение D-схем в качестве математического аппарата в теории автоматического управления. Для иллюстрации
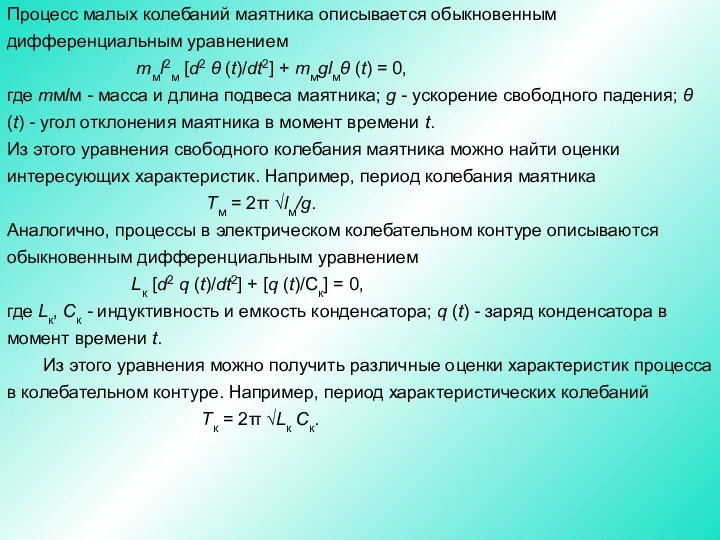
- 10. Процесс малых колебаний маятника описывается обыкновенным дифференциальным уравнением mмl2м [d2 θ (t)/dt2] + mмglмθ (t) =
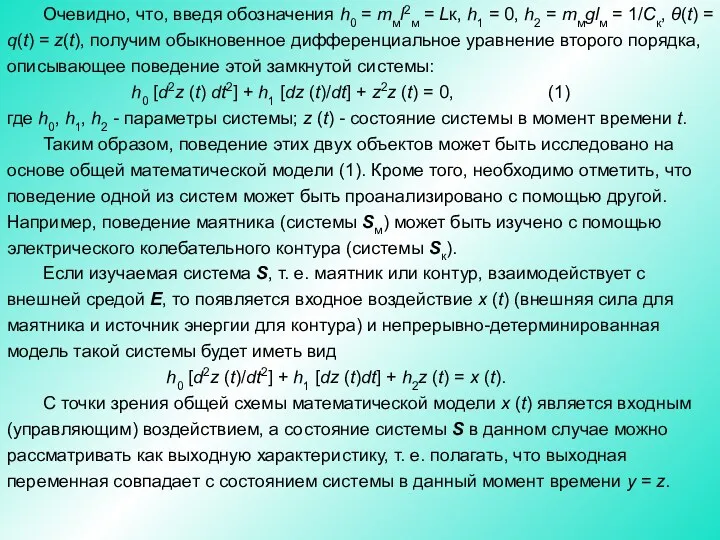
- 11. Очевидно, что, введя обозначения h0 = тмl2м = Lк, h1 = 0, h2 = mмglм =
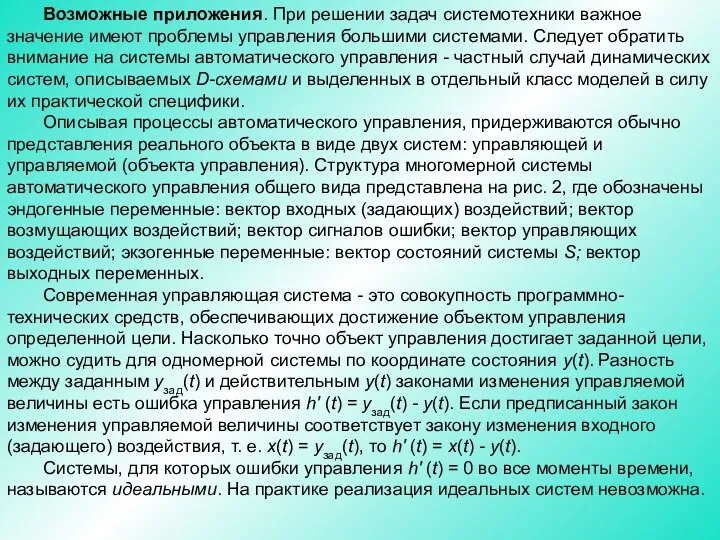
- 12. Возможные приложения. При решении задач системотехники важное значение имеют проблемы управления большими системами. Следует обратить внимание
- 13. Рис. 2. Структура системы автоматического управления
- 14. Таким образом, ошибка h'(t) - необходимый субстрат автоматического управления, основанного на принципе отрицательной обратной связи, так
- 15. Пример 2. Рассмотрим одноканальную систему автоматического управления SA, которая описывается D-схемой общего вида F (уn, уn-1,
- 16. Таким образом, использование D-схем позволяет формализовать процесс функционирования непрерывно-детерминированных систем S и оценить их основные характеристики,
- 17. Абстрактно конечный автомат (англ, finite automata) можно представить как математическую схему (F-схему), характеризующуюся шестью элементами: конечным
- 18. Абстрактный конечный автомат реализует некоторое отображение множества слов входного алфавита X на множество слов выходного алфавита
- 19. Таким образом, уравнения (3) - (7), полностью задающие F-автомат, являются частным случаем уравнений (1) и (2),
- 20. Таким образом, реакция автомата на каждое значение входного сигнала заканчивается за один такт, длительность которого определяется
- 21. При другом способе задания конечного автомата используется понятие направленного графа. Граф автомата представляет собой набор вершин,
- 22. Рис. 3. Графы автоматов Мили (а) и Мура (б)
- 23. При решении задач моделирования систем часто более удобной формой является матричное задание конечного автомата. При этом
- 24. i-я компонента которого - выходной сигнал, отмечающий состояние zi. Пример 3. Для рассмотренного выше F-автомата Мура
- 25. Для детерминированных автоматов выполняется условие однозначности переходов: автомат, находящийся в некотором состоянии, под действием любого входного
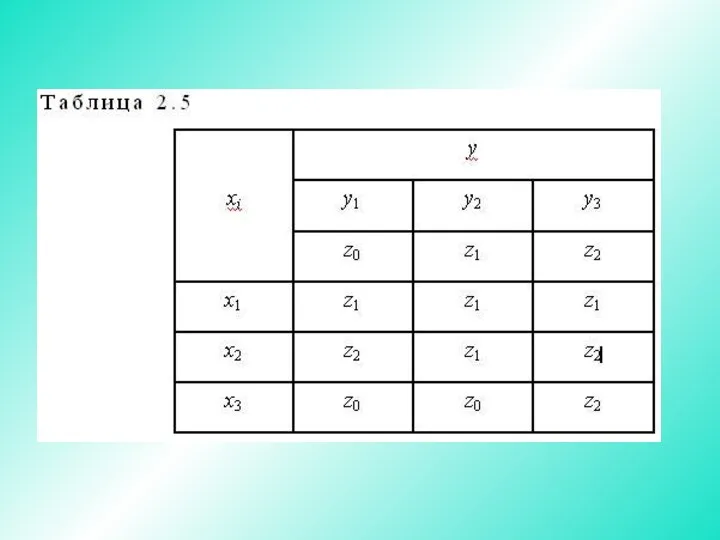
- 26. Пример 4. Рассмотрим асинхронный F-автомат Мура, который описан табл. 2.5 и приведен на рис. 4. Очевидно,
- 28. Таким образом, понятие F-автомата в дискретно-детерминированном подходе к исследованию на моделях свойств объектов является математической абстракцией,
- 29. ДИСКРЕТНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ (Р-СХЕМЫ) Рассмотрим особенности построения математических схем при дискретно-стохастическом подходе к формализации процесса функционирования исследуемой
- 30. Введем математическое понятие Р-автомата, используя понятия, введенные для F-автомата. Рассмотрим множество G, элементами которого являются всевозможные
- 31. Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и Z, что можно представить
- 32. Пусть теперь определение выходного сигнала Р-автомата зависит лишь от того состояния, в котором находится автомат в
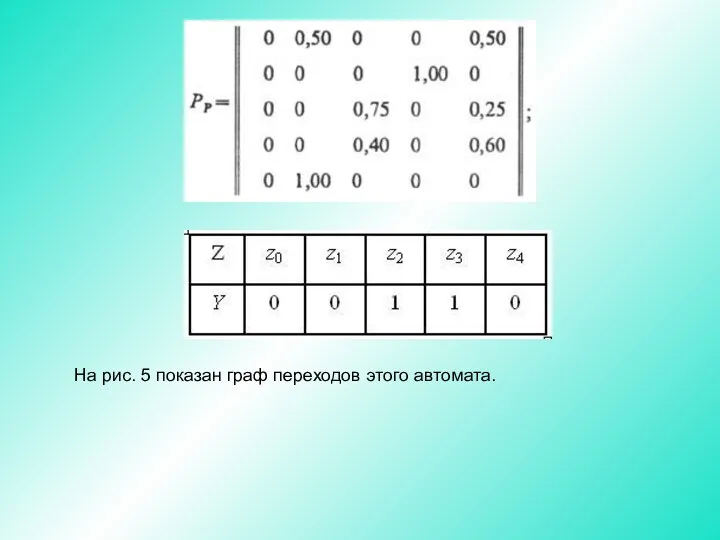
- 33. Пример 5. Рассмотрим Y-детерминированный Р-автомат, который задан таблицей переходов (табл. 2.6) и таблицей выходов: В этих
- 34. Таблица 2.6 Для описания Y-детерминированного Р-автомата необходимо задать начальное распределение вероятностей вида
- 35. Здесь dK - вероятность того, что в начале работы Р-автомат находится в состоянии k. Будем считать,
- 36. На рис. 5 показан граф переходов этого автомата.
- 37. Рис. 5. Граф вероятностного автомата
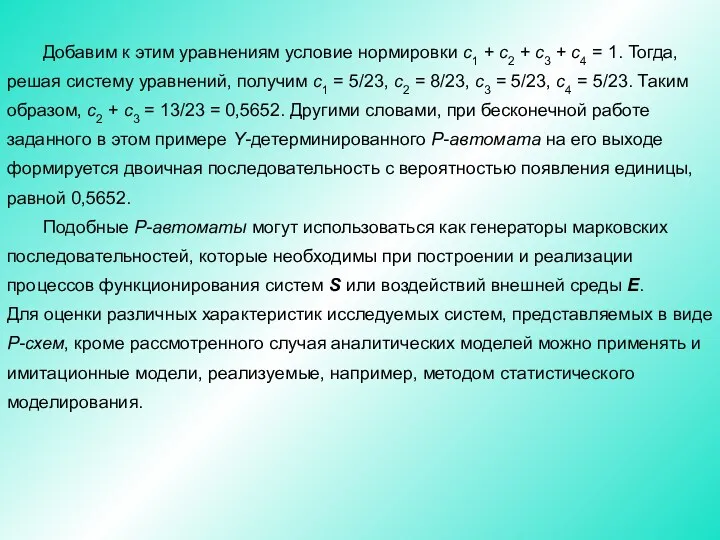
- 38. Требуется оценить суммарные финальные вероятности пребывания этого Р-автомата в состояниях z2 и z3. При использовании аналитического
- 39. Добавим к этим уравнениям условие нормировки c1 + c2 + с3 + c4 = 1. Тогда,
- 40. НЕПРЕРЫВНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ (Q-СХЕМЫ) Особенности непрерывно-стохастического подхода рассмотрим на примере использования в качестве типовых математических схем систем
- 41. В любом элементарном акте обслуживания можно выделить две основные составляющие: ожидание обслуживания заявкой и собственно обслуживание
- 42. Рис. 6. Прибор обслуживания заявок Потоком неоднородных событий называется последовательность {tn, fn), где tn - вызывающие
- 43. Пример потока событий приведен на рис. 7, где обозначено Тj - интервал между событиями (случайная величина);
- 44. Стационарным потоком событий называется поток, для которого вероятность появления того или иного числа событий на интервале
- 45. Интенсивность потока может быть любой неотрицательной функцией времени, имеющей размерность, обратную размерности времени. Для стационарного потока
- 46. В практике моделирования систем, имеющих более сложные структурные связи и алгоритмы поведения, для формализации используются не
- 47. Следует отметить, что в теории массового обслуживания в зависимости от емкости накопителя применяют следующую терминологию для
- 48. В зависимости от динамики приоритетов в Q-схемах различают статические и динамические приоритеты. Статические приоритеты назначаются заранее
- 49. Кроме того, для заявок необходимо задать правила, по которым они остаются в канале Ki или не
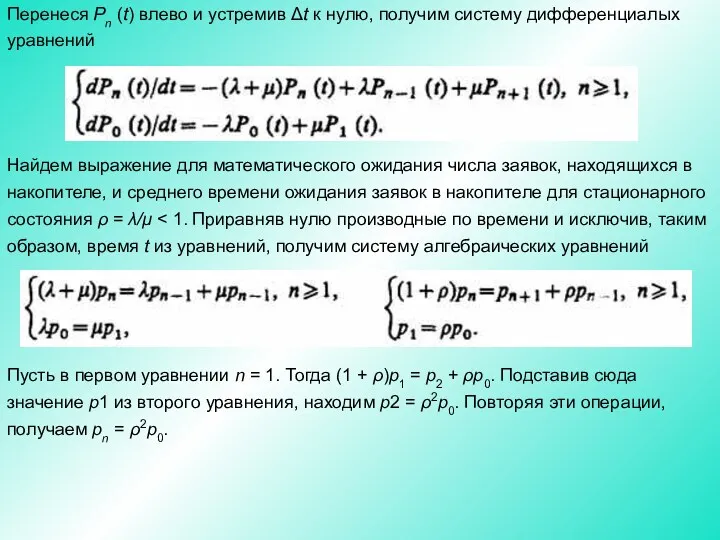
- 50. Пример 7. Допустим, что процесс обслуживания начинается при отсутствии заявок в накопителе. Тогда состояния системы массового
- 51. Перенеся Рn (t) влево и устремив Δt к нулю, получим систему дифференциалых уравнений Найдем выражение для
- 52. Возможности оценки характеристик с использованием аналитических моделей теории массового обслуживания являются весьма ограниченными по сравнению с
- 53. Формально сеть Петри (N-схема) задается четверкой вида N = , где B - конечное множество символов,
- 54. Рис. 8. Графическое изображение N-схемы Графически N-схема изображается в виде двудольного ориентированного мультиграфа, представляющего собой совокупность
- 55. Пример 7. Представим формально N-схему, показанную в виде графа на рис. 7: N = , B
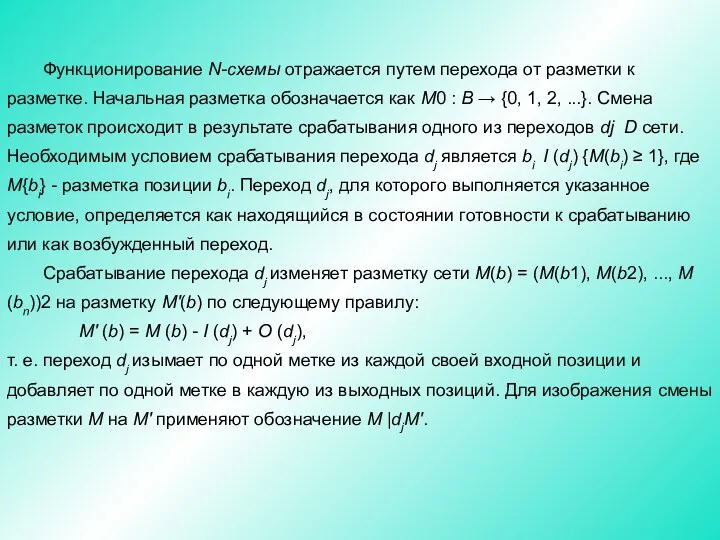
- 56. Функционирование N-схемы отражается путем перехода от разметки к разметке. Начальная разметка обозначается как M0 : В
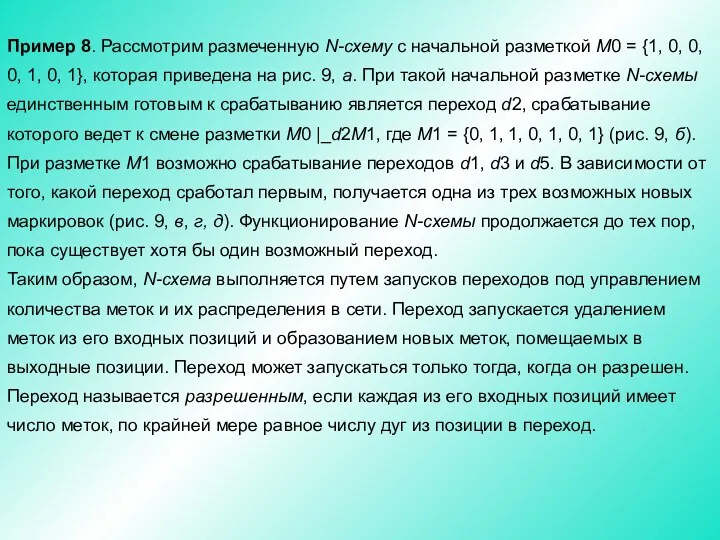
- 57. Пример 8. Рассмотрим размеченную N-схему с начальной разметкой М0 = {1, 0, 0, 0, 1, 0,
- 58. Рис. 9. Пример функционирования размеченной N-схемы
- 59. Пример 9. Для некоторой заданной размеченной N-схемы (рис. 8) с начальной маркировкой M0 = {1, 2,
- 60. Рис. 10. Пример функционирования размеченной заданной N-схемы
- 61. Типовые N-схемы на основе обычных размеченных сетей Петри пригодны для описания в моделируемой системе S событий
- 62. Основные соотношения. Анализ существующих средств моделирования систем и задач, решаемых с помощью метода моделирования на ЭВМ,
- 63. Если некоторые из полученных подсистем оказываются в свою очередь еще достаточно сложными, то процесс их разбиения
- 64. В начальный момент времени t0 состояния z имеют значения, равные z0, т. е. z0 = z(t0),
- 65. На оператор U не накладывается никаких ограничений, поэтому допустимы скачки состояний δz в моменты времени, не
- 66. Возможные приложения. Существует класс больших систем, которые ввиду их сложности не могут быть формализованы в виде
- 67. Рис. 11. Структура агрегативной системы
- 68. Агрегаты, не являющиеся полюсами, называются внутренними. Каждый n-й агрегат А-схемы Аn, имеет входные контакты, на которые
- 69. Взаимодействие А-схемы с внешней средой Е рассматривается как обмен сигналами между внешней средой Е и элементами
- 70. Требования пользователя к модели. Сформулируем основные требования, предъявляемые к модели М процесса функционирования системы S. 1.
- 71. 7. Должно быть реализовано проведение целенаправленных (планируемых) машинных экспериментов с моделью системы с использованием аналитико-имитационного подхода
- 73. Скачать презентацию
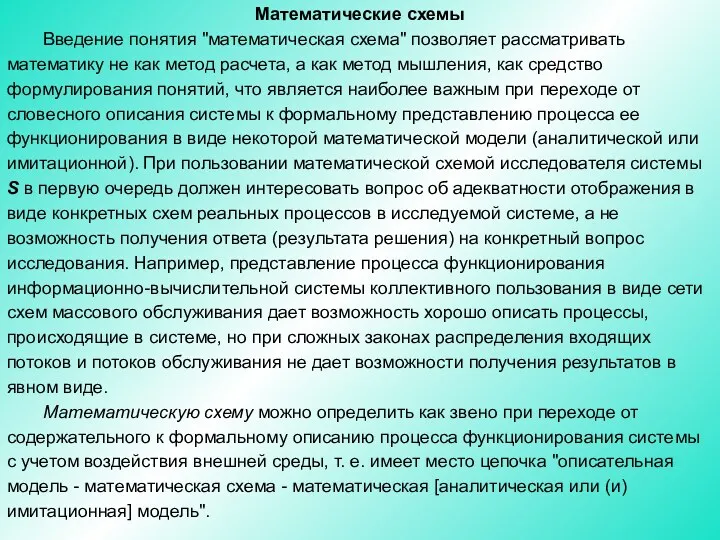
Математические схемы
Введение понятия "математическая схема" позволяет рассматривать математику не как
Математические схемы
Введение понятия "математическая схема" позволяет рассматривать математику не как
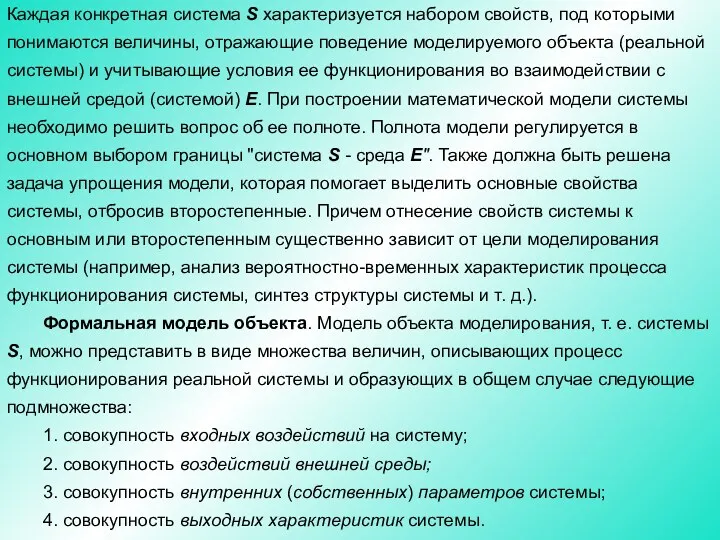
Каждая конкретная система S характеризуется набором свойств, под которыми понимаются величины,
Каждая конкретная система S характеризуется набором свойств, под которыми понимаются величины,
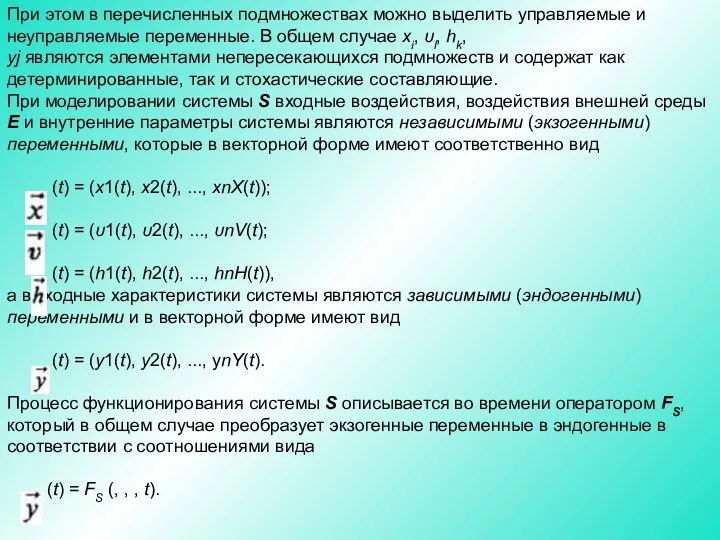
При этом в перечисленных подмножествах можно выделить управляемые и неуправляемые переменные.
При этом в перечисленных подмножествах можно выделить управляемые и неуправляемые переменные.
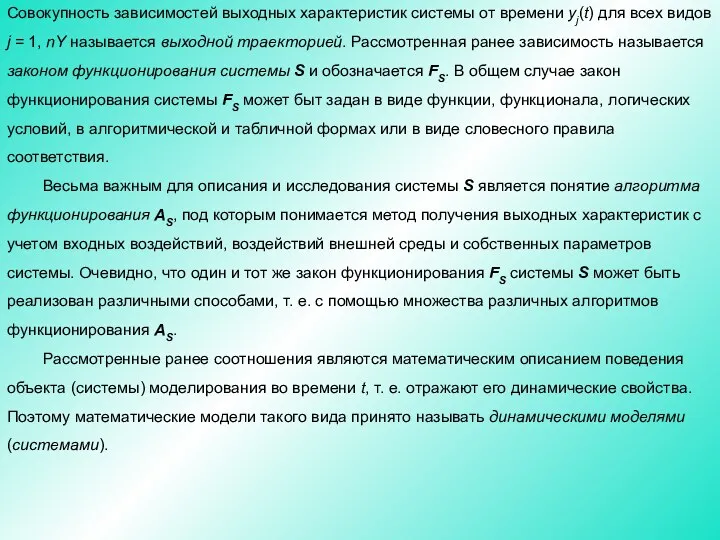
Совокупность зависимостей выходных характеристик системы от времени уj(t) для всех видов
Совокупность зависимостей выходных характеристик системы от времени уj(t) для всех видов
Типовые схемы. Приведенные математические соотношения представляют собой математические схемы общего вида
Типовые схемы. Приведенные математические соотношения представляют собой математические схемы общего вида
Перечисленные типовые математические схемы, естественно, не могут претендовать на возможность описания
Перечисленные типовые математические схемы, естественно, не могут претендовать на возможность описания
НЕПРЕРЫВНО-ДЕТЕРМИНИРОВАННЫЕ МОДЕЛИ
(D-СХЕМЫ)
Рассмотрим особенности непрерывно-детерминированного подхода на примере использования в качестве математических
НЕПРЕРЫВНО-ДЕТЕРМИНИРОВАННЫЕ МОДЕЛИ
(D-СХЕМЫ)
Рассмотрим особенности непрерывно-детерминированного подхода на примере использования в качестве математических
Наиболее важно для системотехники приложение D-схем в качестве математического аппарата в
Наиболее важно для системотехники приложение D-схем в качестве математического аппарата в
Процесс малых колебаний маятника описывается обыкновенным дифференциальным уравнением
mмl2м [d2
Процесс малых колебаний маятника описывается обыкновенным дифференциальным уравнением
mмl2м [d2
Очевидно, что, введя обозначения h0 = тмl2м = Lк, h1 =
Очевидно, что, введя обозначения h0 = тмl2м = Lк, h1 =
Возможные приложения. При решении задач системотехники важное значение имеют проблемы управления
Возможные приложения. При решении задач системотехники важное значение имеют проблемы управления
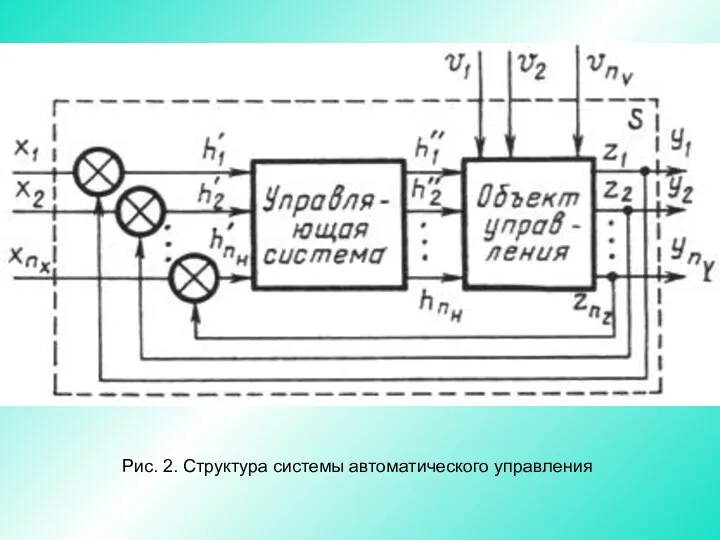
Рис. 2. Структура системы автоматического управления
Рис. 2. Структура системы автоматического управления
Таким образом, ошибка h'(t) - необходимый субстрат автоматического управления, основанного на
Таким образом, ошибка h'(t) - необходимый субстрат автоматического управления, основанного на

Пример 2. Рассмотрим одноканальную систему автоматического управления SA, которая описывается D-схемой
Пример 2. Рассмотрим одноканальную систему автоматического управления SA, которая описывается D-схемой

Таким образом, использование D-схем позволяет формализовать процесс функционирования непрерывно-детерминированных систем S
Таким образом, использование D-схем позволяет формализовать процесс функционирования непрерывно-детерминированных систем S
Абстрактно конечный автомат (англ, finite automata) можно представить как математическую схему
Абстрактно конечный автомат (англ, finite automata) можно представить как математическую схему

Абстрактный конечный автомат реализует некоторое отображение множества слов входного алфавита X
Абстрактный конечный автомат реализует некоторое отображение множества слов входного алфавита X
Таким образом, уравнения (3) - (7), полностью задающие F-автомат, являются частным
Таким образом, уравнения (3) - (7), полностью задающие F-автомат, являются частным
Таким образом, реакция автомата на каждое значение входного сигнала заканчивается за
Таким образом, реакция автомата на каждое значение входного сигнала заканчивается за

При другом способе задания конечного автомата используется понятие направленного графа. Граф
При другом способе задания конечного автомата используется понятие направленного графа. Граф
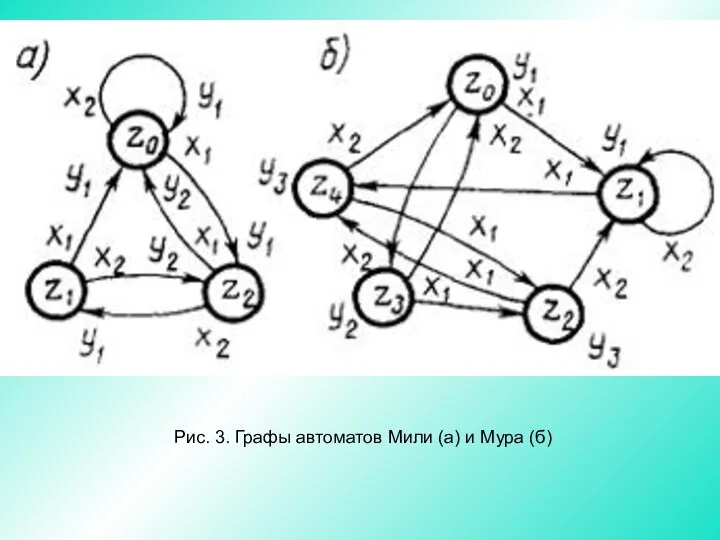
Рис. 3. Графы автоматов Мили (а) и Мура (б)
Рис. 3. Графы автоматов Мили (а) и Мура (б)
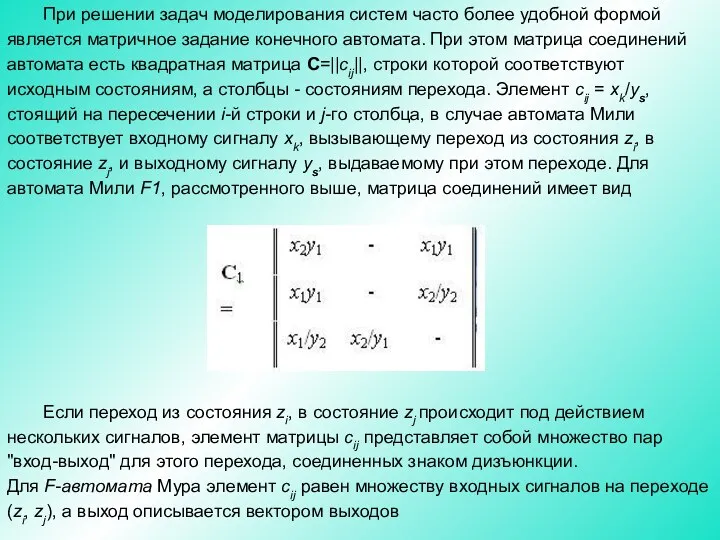
При решении задач моделирования систем часто более удобной формой является матричное
При решении задач моделирования систем часто более удобной формой является матричное
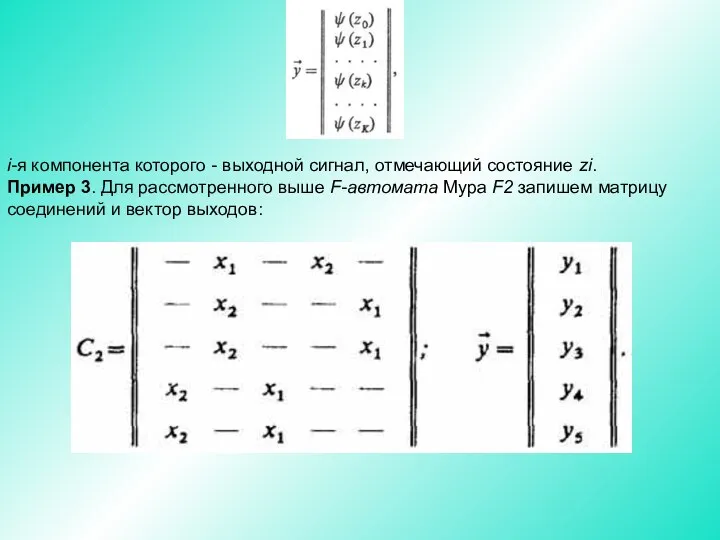
i-я компонента которого - выходной сигнал, отмечающий состояние zi.
Пример 3.
i-я компонента которого - выходной сигнал, отмечающий состояние zi.
Пример 3.
Для детерминированных автоматов выполняется условие однозначности переходов: автомат, находящийся в некотором
Для детерминированных автоматов выполняется условие однозначности переходов: автомат, находящийся в некотором
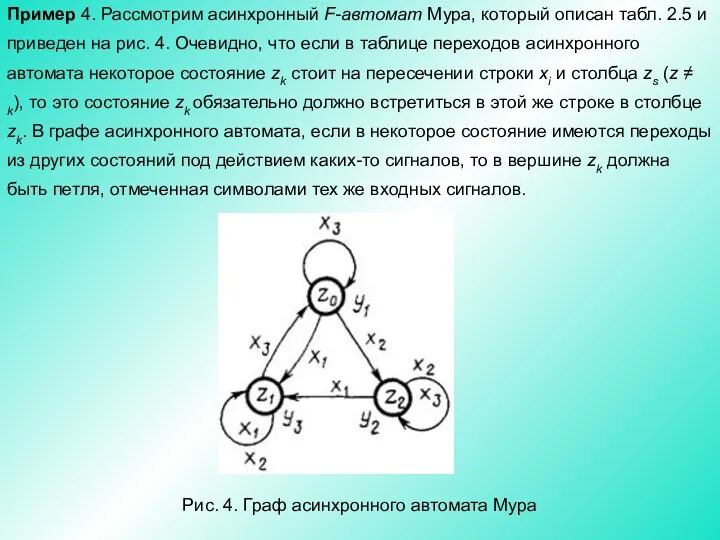
Пример 4. Рассмотрим асинхронный F-автомат Мура, который описан табл. 2.5 и
Пример 4. Рассмотрим асинхронный F-автомат Мура, который описан табл. 2.5 и
Таким образом, понятие F-автомата в дискретно-детерминированном подходе к исследованию на моделях
Таким образом, понятие F-автомата в дискретно-детерминированном подходе к исследованию на моделях
ДИСКРЕТНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ
(Р-СХЕМЫ)
Рассмотрим особенности построения математических схем при дискретно-стохастическом подходе к формализации
ДИСКРЕТНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ
(Р-СХЕМЫ)
Рассмотрим особенности построения математических схем при дискретно-стохастическом подходе к формализации
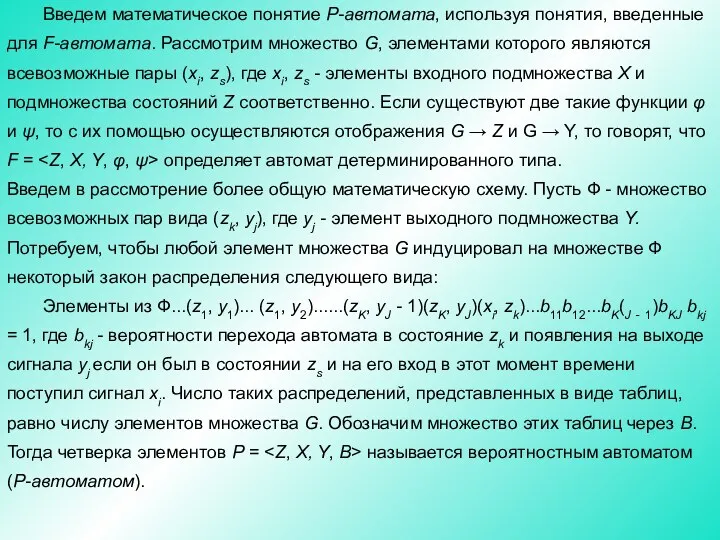
Введем математическое понятие Р-автомата, используя понятия, введенные для F-автомата. Рассмотрим множество
Введем математическое понятие Р-автомата, используя понятия, введенные для F-автомата. Рассмотрим множество

Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y
Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y
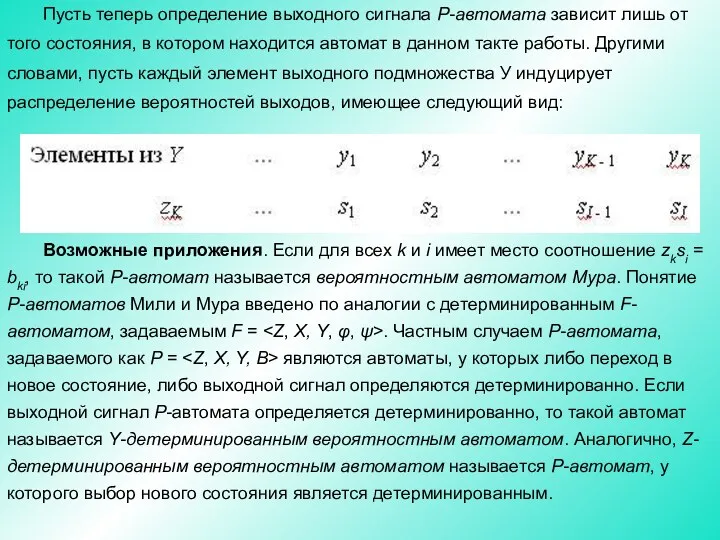
Пусть теперь определение выходного сигнала Р-автомата зависит лишь от того состояния,
Пусть теперь определение выходного сигнала Р-автомата зависит лишь от того состояния,
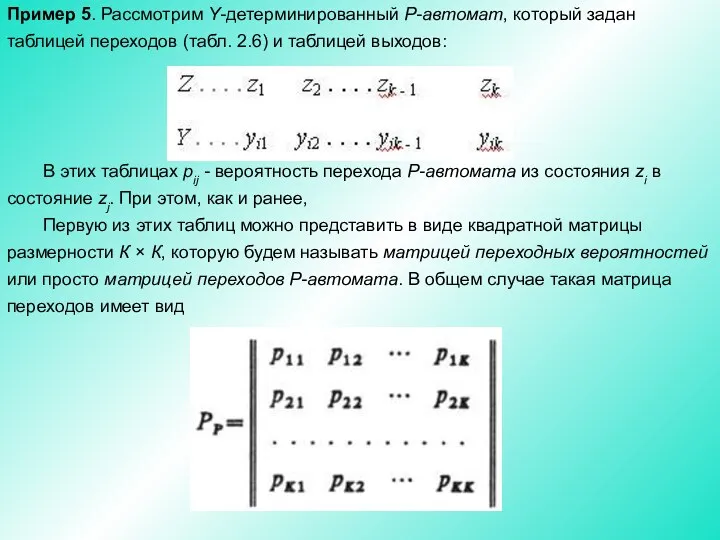
Пример 5. Рассмотрим Y-детерминированный Р-автомат, который задан таблицей переходов (табл. 2.6)
Пример 5. Рассмотрим Y-детерминированный Р-автомат, который задан таблицей переходов (табл. 2.6)

Таблица 2.6
Для описания Y-детерминированного Р-автомата необходимо задать начальное распределение вероятностей
Таблица 2.6
Для описания Y-детерминированного Р-автомата необходимо задать начальное распределение вероятностей
Здесь dK - вероятность того, что в начале работы Р-автомат находится
Здесь dK - вероятность того, что в начале работы Р-автомат находится
На рис. 5 показан граф переходов этого автомата.
На рис. 5 показан граф переходов этого автомата.
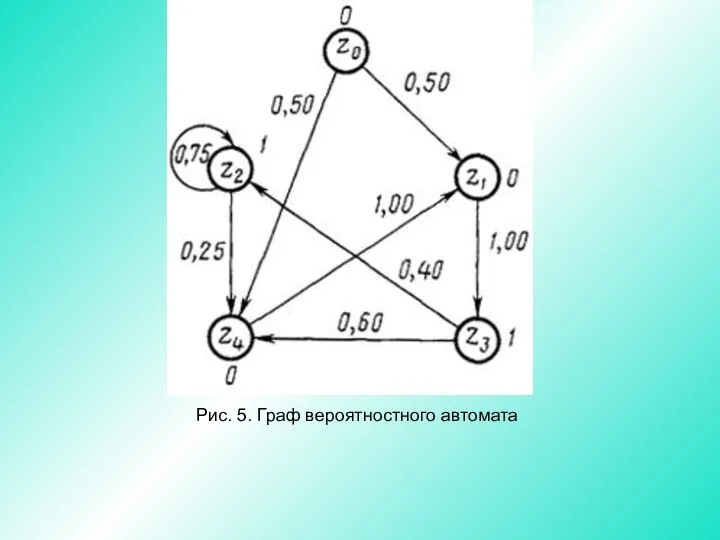
Рис. 5. Граф вероятностного автомата
Рис. 5. Граф вероятностного автомата

Требуется оценить суммарные финальные вероятности пребывания этого Р-автомата в состояниях z2
Требуется оценить суммарные финальные вероятности пребывания этого Р-автомата в состояниях z2
Добавим к этим уравнениям условие нормировки c1 + c2 + с3
Добавим к этим уравнениям условие нормировки c1 + c2 + с3
НЕПРЕРЫВНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ
(Q-СХЕМЫ)
Особенности непрерывно-стохастического подхода рассмотрим на примере использования в качестве типовых
НЕПРЕРЫВНО-СТОХАСТИЧЕСКИЕ МОДЕЛИ
(Q-СХЕМЫ)
Особенности непрерывно-стохастического подхода рассмотрим на примере использования в качестве типовых
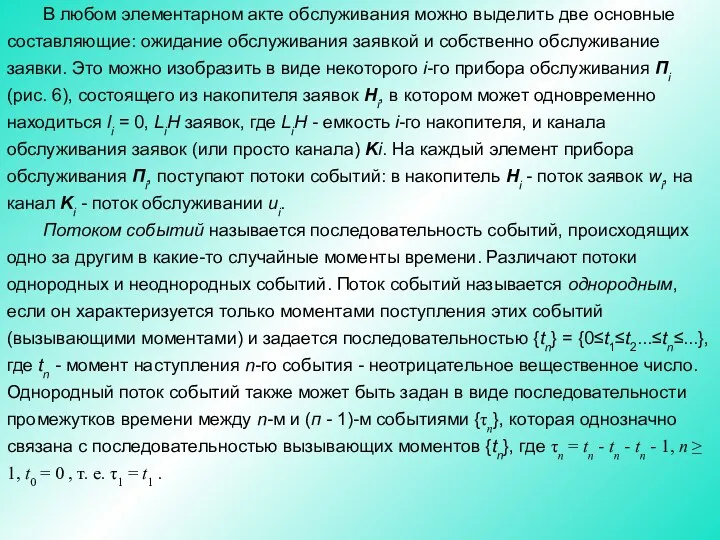
В любом элементарном акте обслуживания можно выделить две основные составляющие: ожидание
В любом элементарном акте обслуживания можно выделить две основные составляющие: ожидание
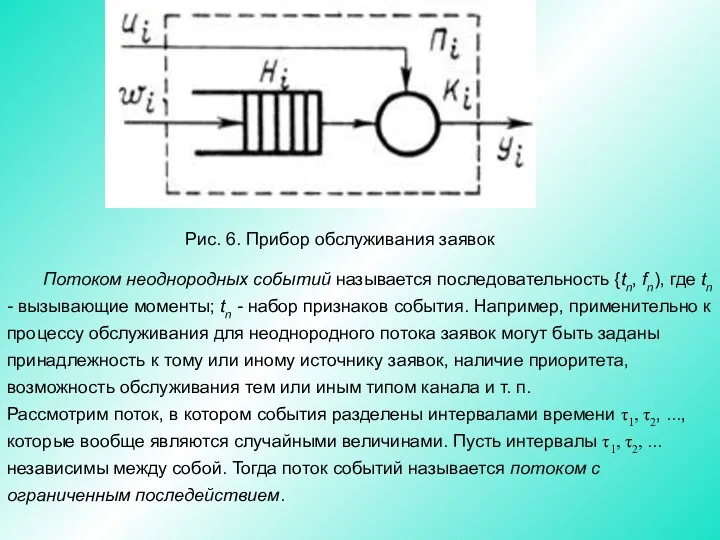
Рис. 6. Прибор обслуживания заявок
Потоком неоднородных событий называется последовательность {tn,
Рис. 6. Прибор обслуживания заявок
Потоком неоднородных событий называется последовательность {tn,
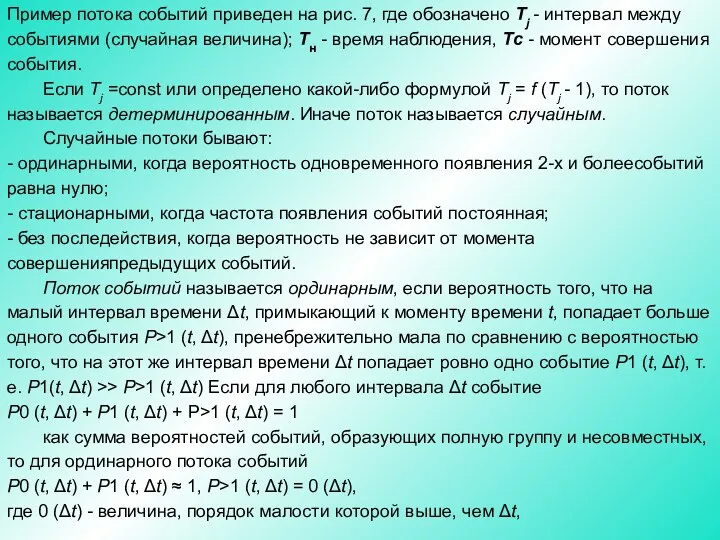
Пример потока событий приведен на рис. 7, где обозначено Тj -
Пример потока событий приведен на рис. 7, где обозначено Тj -
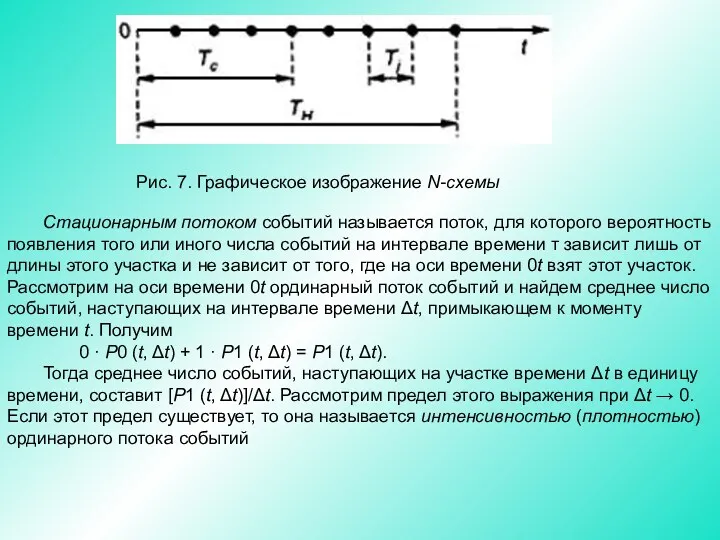
Стационарным потоком событий называется поток, для которого вероятность появления того или
Стационарным потоком событий называется поток, для которого вероятность появления того или

Интенсивность потока может быть любой неотрицательной функцией времени, имеющей размерность, обратную
Интенсивность потока может быть любой неотрицательной функцией времени, имеющей размерность, обратную
В практике моделирования систем, имеющих более сложные структурные связи и алгоритмы
В практике моделирования систем, имеющих более сложные структурные связи и алгоритмы
Следует отметить, что в теории массового обслуживания в зависимости от емкости
Следует отметить, что в теории массового обслуживания в зависимости от емкости

В зависимости от динамики приоритетов в Q-схемах различают статические и динамические
В зависимости от динамики приоритетов в Q-схемах различают статические и динамические
Кроме того, для заявок необходимо задать правила, по которым они остаются
Кроме того, для заявок необходимо задать правила, по которым они остаются
Пример 7. Допустим, что процесс обслуживания начинается при отсутствии заявок в
Пример 7. Допустим, что процесс обслуживания начинается при отсутствии заявок в
Перенеся Рn (t) влево и устремив Δt к нулю, получим систему
Перенеся Рn (t) влево и устремив Δt к нулю, получим систему

Возможности оценки характеристик с использованием аналитических моделей теории массового обслуживания являются
Возможности оценки характеристик с использованием аналитических моделей теории массового обслуживания являются

Формально сеть Петри (N-схема) задается четверкой вида
N =
Формально сеть Петри (N-схема) задается четверкой вида
N =

Рис. 8. Графическое изображение N-схемы
Графически N-схема изображается в виде двудольного
Рис. 8. Графическое изображение N-схемы
Графически N-схема изображается в виде двудольного
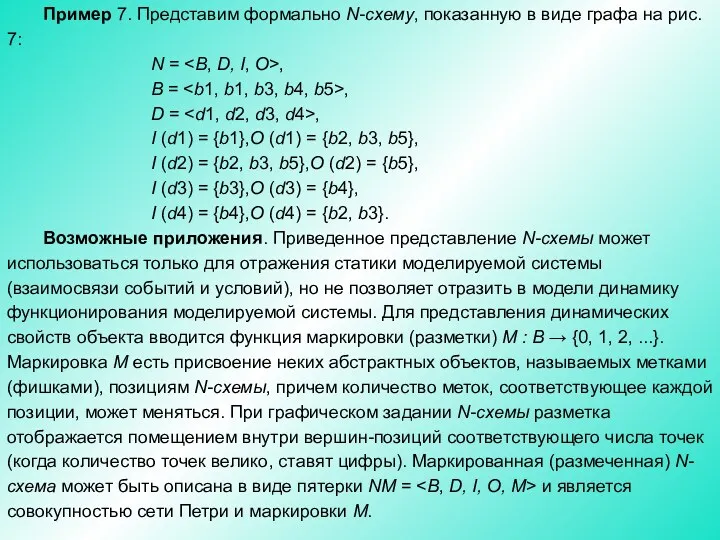
Пример 7. Представим формально N-схему, показанную в виде графа на рис.
Пример 7. Представим формально N-схему, показанную в виде графа на рис.
Функционирование N-схемы отражается путем перехода от разметки к разметке. Начальная разметка
Функционирование N-схемы отражается путем перехода от разметки к разметке. Начальная разметка
Пример 8. Рассмотрим размеченную N-схему с начальной разметкой М0 = {1,
Пример 8. Рассмотрим размеченную N-схему с начальной разметкой М0 = {1,
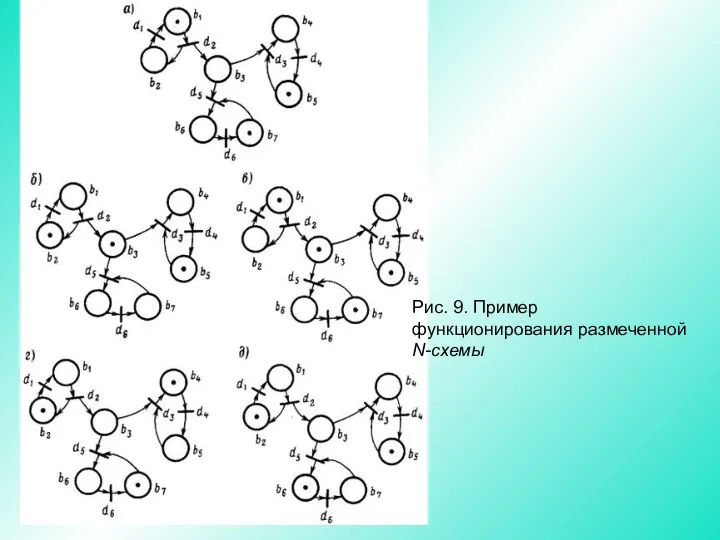
Рис. 9. Пример функционирования размеченной N-схемы
Рис. 9. Пример функционирования размеченной N-схемы
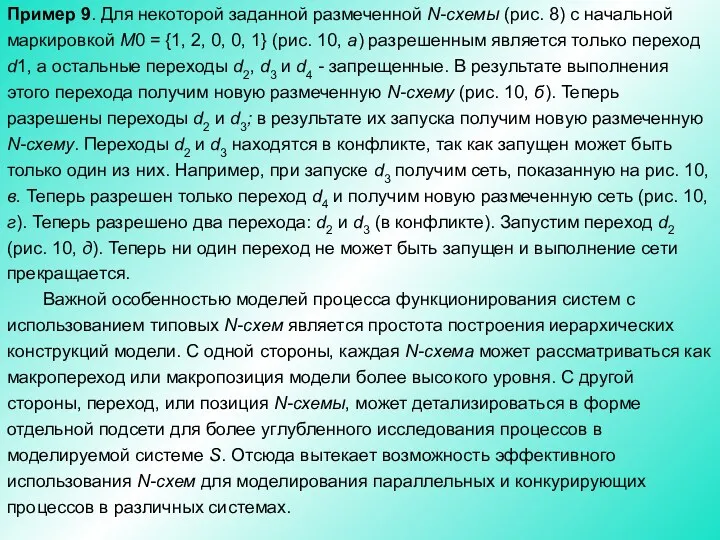
Пример 9. Для некоторой заданной размеченной N-схемы (рис. 8) с начальной
Пример 9. Для некоторой заданной размеченной N-схемы (рис. 8) с начальной
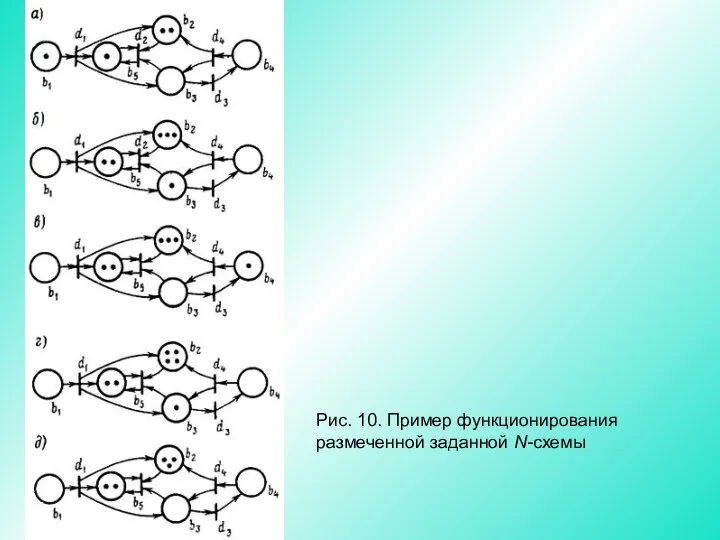
Рис. 10. Пример функционирования размеченной заданной N-схемы
Рис. 10. Пример функционирования размеченной заданной N-схемы
Типовые N-схемы на основе обычных размеченных сетей Петри пригодны для описания
Типовые N-схемы на основе обычных размеченных сетей Петри пригодны для описания
Основные соотношения. Анализ существующих средств моделирования систем и задач, решаемых с
Основные соотношения. Анализ существующих средств моделирования систем и задач, решаемых с
Если некоторые из полученных подсистем оказываются в свою очередь еще достаточно
Если некоторые из полученных подсистем оказываются в свою очередь еще достаточно

В начальный момент времени t0 состояния z имеют значения, равные z0,
В начальный момент времени t0 состояния z имеют значения, равные z0,
На оператор U не накладывается никаких ограничений, поэтому допустимы скачки состояний
На оператор U не накладывается никаких ограничений, поэтому допустимы скачки состояний
Возможные приложения. Существует класс больших систем, которые ввиду их сложности не
Возможные приложения. Существует класс больших систем, которые ввиду их сложности не
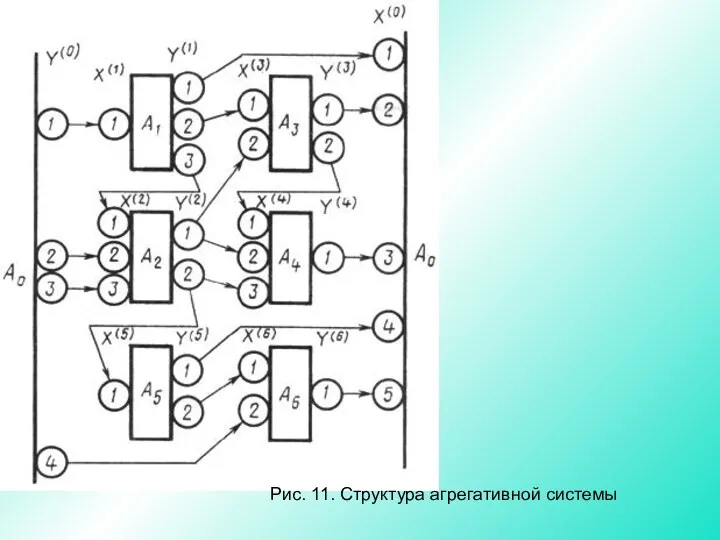
Рис. 11. Структура агрегативной системы
Рис. 11. Структура агрегативной системы

Агрегаты, не являющиеся полюсами, называются внутренними.
Каждый n-й агрегат А-схемы Аn,
Агрегаты, не являющиеся полюсами, называются внутренними.
Каждый n-й агрегат А-схемы Аn,

Взаимодействие А-схемы с внешней средой Е рассматривается как обмен сигналами между
Взаимодействие А-схемы с внешней средой Е рассматривается как обмен сигналами между
Требования пользователя к модели. Сформулируем основные требования, предъявляемые к модели М
Требования пользователя к модели. Сформулируем основные требования, предъявляемые к модели М
7. Должно быть реализовано проведение целенаправленных (планируемых) машинных экспериментов с моделью
7. Должно быть реализовано проведение целенаправленных (планируемых) машинных экспериментов с моделью
 Вероятность равновозможных событий
Вероятность равновозможных событий Деление с остатком. 5 класс
Деление с остатком. 5 класс Математические фокусы. Виды фокусов
Математические фокусы. Виды фокусов Тригонометрический круг
Тригонометрический круг Урок математики Внетабличное деление вида 87 : 29 3 класс
Урок математики Внетабличное деление вида 87 : 29 3 класс Классическое определение вероятности
Классическое определение вероятности Методы построения графиков функций с использованием свойств функции
Методы построения графиков функций с использованием свойств функции Действительные числа
Действительные числа Умники и умницы. Матиматека
Умники и умницы. Матиматека Презентация Закрепление таблицы умножения
Презентация Закрепление таблицы умножения Презентация к уроку математики по теме Признаки предметов 1 класс, программа 2100, урок №5
Презентация к уроку математики по теме Признаки предметов 1 класс, программа 2100, урок №5 Производная
Производная Восемь способов решения одного тригонометрического уравнения
Восемь способов решения одного тригонометрического уравнения Занимательная математика
Занимательная математика Понятие отношения
Понятие отношения Презентация для интерактивной доски
Презентация для интерактивной доски Trigonometry 1
Trigonometry 1 Деление с остатком
Деление с остатком Правила построения рядов динамики
Правила построения рядов динамики Площади фигур. Теорема Пифагора
Площади фигур. Теорема Пифагора Функция. Свойства функции
Функция. Свойства функции Десятичная запись дробных чисел
Десятичная запись дробных чисел Прямая, луч, отрезок.Выполнена учителем начальных классов Поповой Т.Д. Скачать бесплатно и без регистрации
Прямая, луч, отрезок.Выполнена учителем начальных классов Поповой Т.Д. Скачать бесплатно и без регистрации Сфера и шар. Теорема
Сфера и шар. Теорема Трапеция. 8 класс
Трапеция. 8 класс Решение уравнений. Урок математики
Решение уравнений. Урок математики Число 7, цифра 7.
Число 7, цифра 7. Нахождение числа по заданному значению его дроби
Нахождение числа по заданному значению его дроби