- Тема 4. Сети Петри

Содержание
- 2. 1 Особенности сетей Петри и области их применения Теория сетей Петри зародилась в 1962 году. Сети
- 3. Работа Петри привлекла внимание сотрудников из проекта Information System Theory (Теория информационных систем) фирмы Applied Data
- 4. 2) Сети Петри позволяют описывать как типовые ситуации в дискретных подсистемах, так и общую динамику работы
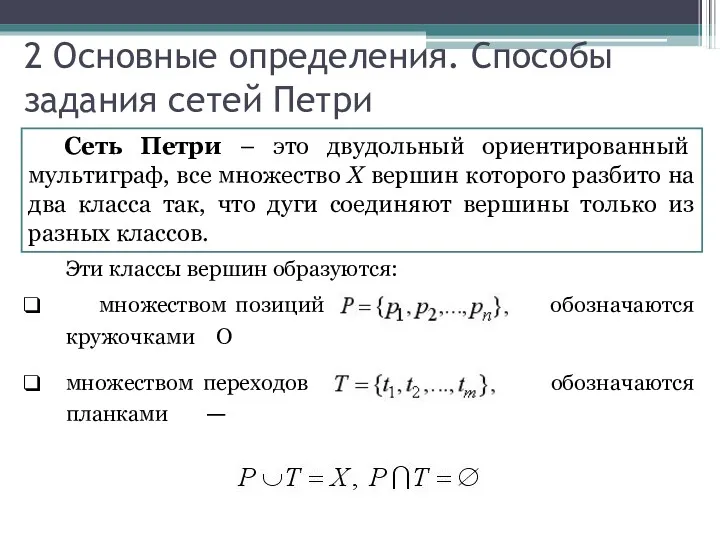
- 5. 2 Основные определения. Способы задания сетей Петри Сеть Петри – это двудольный ориентированный мультиграф, все множество
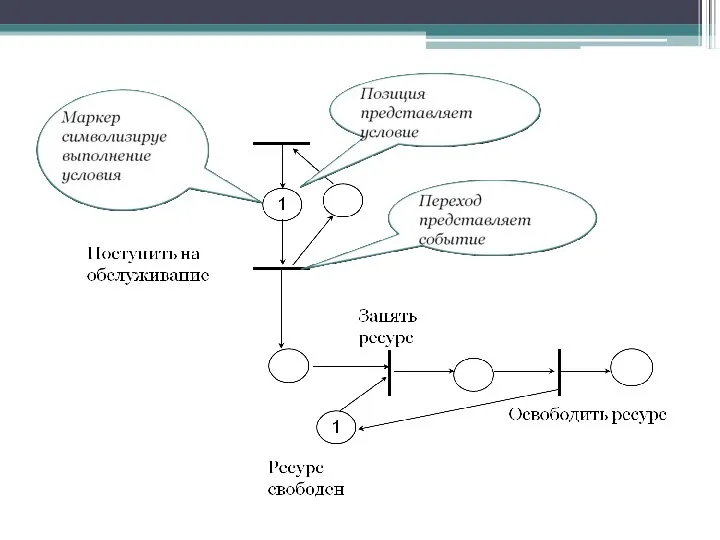
- 6. При моделировании отражаются два аспекта систем: события и условия. Возможность наступления событий обеспечивается выполнением определенных условий.
- 8. Графическое представление сети Петри Множество позиций P = {p1, p2, p3, p4} Множество переходов T =
- 9. Начальная маркировка сети обозначается вектором - определяют для каждой позиции pi количество фишек в этой позиции.
- 10. F(t1) = {p1, p2}, H(t1) = {p1, p3 }, F(t2) = {p4}, H(t2) = {p2, p2,
- 11. Для рассматриваемой сети Петри Матрица D = D+ – D - - матрица инцидентности сети Петри
- 12. 3 Функционирование сетей Петри Выполнение определенных условий связано с появлением меток в соответствующих этим условиям позициях.
- 13. Необходимое условие срабатывания перехода ti: Каждая из его входных позиций должна иметь не меньше фишек, чем
- 14. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3
- 15. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3
- 16. При начальной маркировке μ0 =[3 1 3 2] сети Петри разрешенными являются все переходы t1, t2,
- 17. Переход t1 [μ0] ≥ [100]* D– = [100] · [3 1 3 2] ≥ [1100] –
- 18. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3 Начальная маркировка
- 19. Переход t2 [μ0] ≥ [010]* D– = [010] · [3132] ≥ [0001] – условие выполняется, переход
- 20. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3 Начальная маркировка
- 21. Переход t3 [μ0] ≥ [001]* D– = [001] · [3132] ≥ [0010] – условие выполняется, переход
- 22. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3 Начальная маркировка
- 23. После срабатывания перехода, имеющего несколько выходных позиций, все позиции получают метки, т.e. происходит распараллеливание процесса, и
- 24. Ограниченность. Это свойство связано с введением ограничений на число меток в позициях. Позиция pi называется k-ограниченной,
- 25. Сохраняемость. Сеть Петри С = (P, T, F, H, μ0) называется строго сохраняющей, если сумма фишек
- 26. Достижимость. Свойство достижимости используется при установлении возможности возникновения некоторой ситуации в системе. Пусть проверяемая ситуация описывается
- 27. 5 Анализ сетей Петри Основная задача анализа сетей Петри – задача достижимости: достижима ли маркировка μ'
- 29. Другой подход к анализу сетей Петри называется матричным и основан на их матричном представлении. Пусть осуществляется
- 30. Для того чтобы существовала последовательность срабатываний σ, которая приводит из μ0 в μ', необходимо, чтобы вектор
- 31. Пример 2 Проверим, является ли достижимой одна из маркировок, полученных на пятом шаге построения дерева, составив
- 32. Система имеет решение x1 = 2; x2 = 1; x3 = 2. Это значит, что исследуемая
- 33. 6 Подклассы и расширения сетей Петри К подклассу автоматных графов относят сети Петри, в которых каждый
- 34. К подклассу маркированных графов относятся сети Петри, в которых каждая позиция имеет только один вход и
- 35. К подклассу устойчивых сетей Петри относятся сети, которые обладают следующим свойством: если при любой маркировке μ
- 37. Скачать презентацию
1 Особенности сетей Петри и области их применения
Теория сетей Петри зародилась
1 Особенности сетей Петри и области их применения
Теория сетей Петри зародилась
Работа Петри привлекла внимание сотрудников из проекта Information System Theory (Теория
Работа Петри привлекла внимание сотрудников из проекта Information System Theory (Теория
2) Сети Петри позволяют описывать как типовые ситуации в дискретных подсистемах,
2 Основные определения. Способы задания сетей Петри
Сеть Петри – это двудольный
2 Основные определения. Способы задания сетей Петри
Сеть Петри – это двудольный
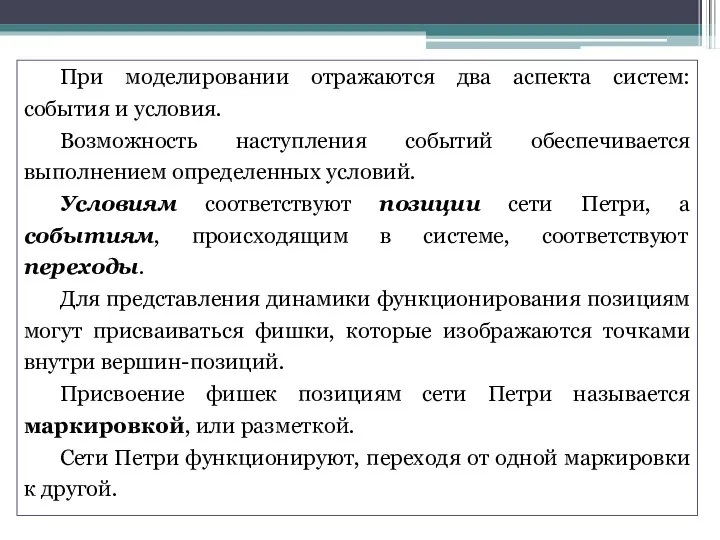
При моделировании отражаются два аспекта систем: события и условия.
Возможность наступления
При моделировании отражаются два аспекта систем: события и условия.
Возможность наступления
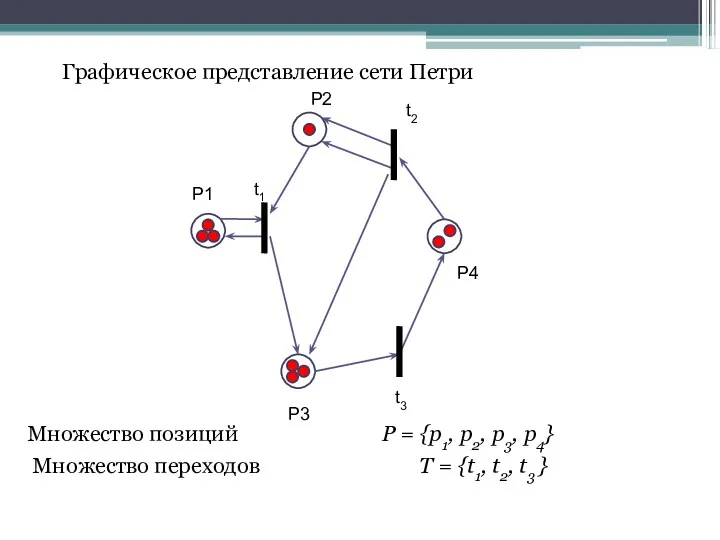
Графическое представление сети Петри
Множество позиций P = {p1, p2, p3, p4}
Графическое представление сети Петри
Множество позиций P = {p1, p2, p3, p4}
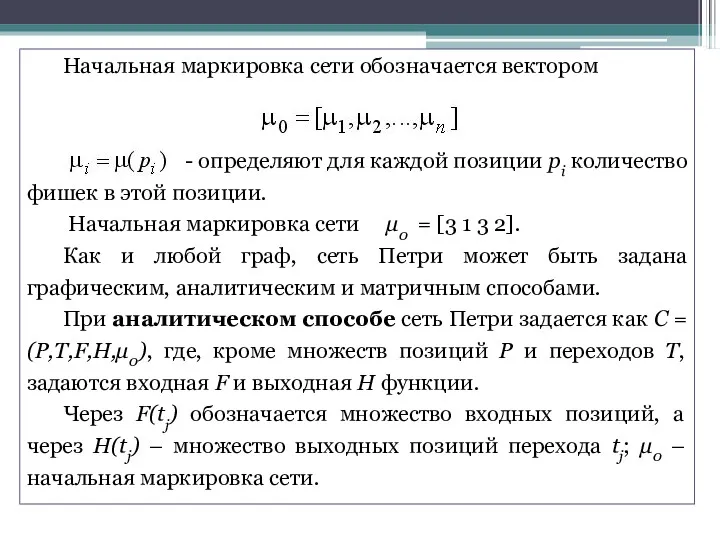
Начальная маркировка сети обозначается вектором
- определяют для каждой позиции pi количество
Начальная маркировка сети обозначается вектором
- определяют для каждой позиции pi количество
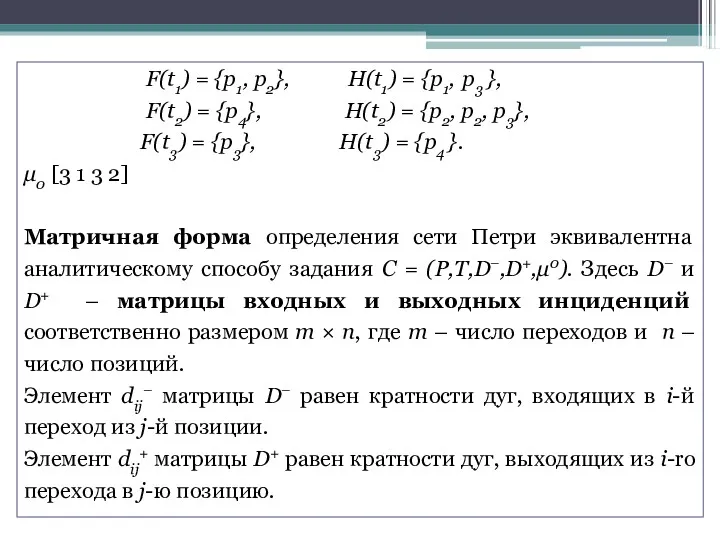
F(t1) = {p1, p2}, H(t1) = {p1, p3 },
F(t2) =
F(t1) = {p1, p2}, H(t1) = {p1, p3 },
F(t2) =
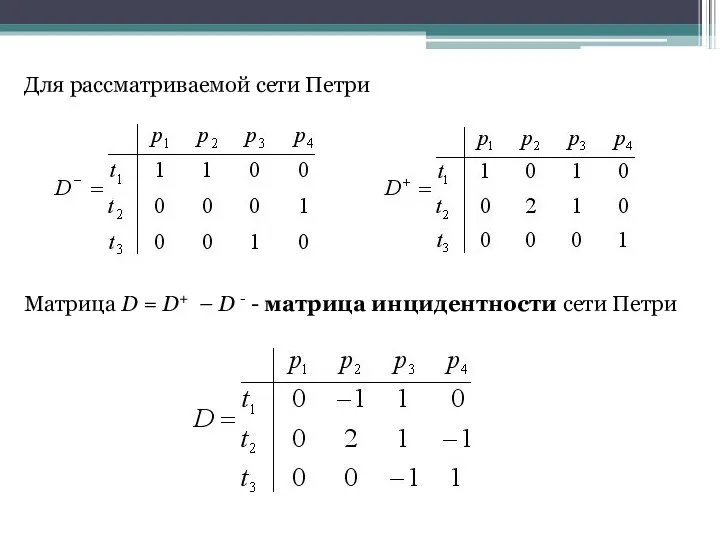
Для рассматриваемой сети Петри
Матрица D = D+ – D -
Для рассматриваемой сети Петри
Матрица D = D+ – D -
3 Функционирование сетей Петри
Выполнение определенных условий связано с появлением меток в
3 Функционирование сетей Петри
Выполнение определенных условий связано с появлением меток в
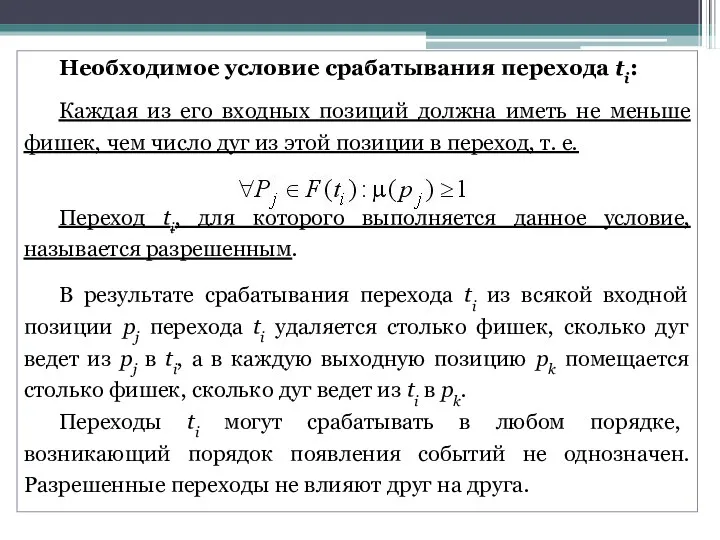
Необходимое условие срабатывания перехода ti:
Каждая из его входных позиций должна
Необходимое условие срабатывания перехода ti:
Каждая из его входных позиций должна
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
![При начальной маркировке μ0 =[3 1 3 2] сети Петри](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/200141/slide-15.jpg)
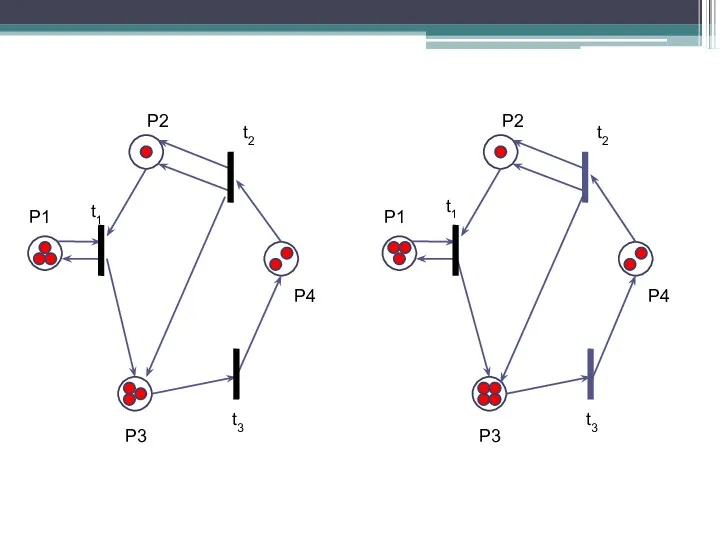
При начальной маркировке μ0 =[3 1 3 2] сети Петри разрешенными
При начальной маркировке μ0 =[3 1 3 2] сети Петри разрешенными
![Переход t1 [μ0] ≥ [100]* D– = [100] · [3](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/200141/slide-16.jpg)
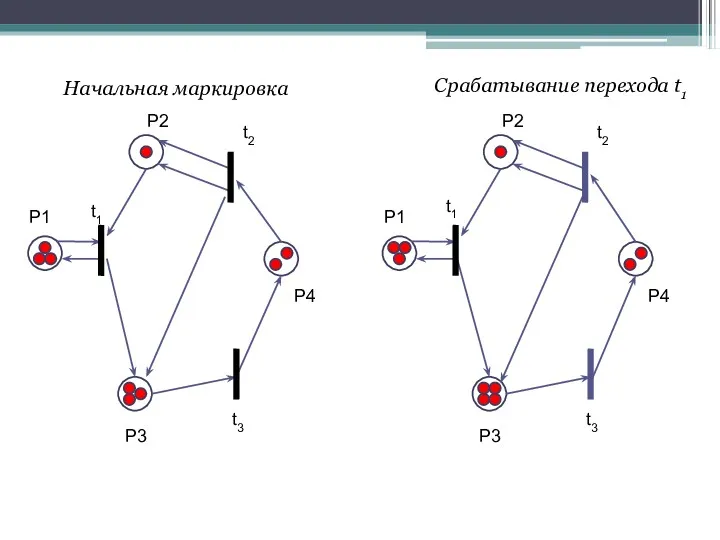
Переход t1
[μ0] ≥ [100]* D– = [100] ·
[3 1 3 2]
Переход t1
[μ0] ≥ [100]* D– = [100] ·
[3 1 3 2]
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t1
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t1
![Переход t2 [μ0] ≥ [010]* D– = [010] · [3132]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/200141/slide-18.jpg)
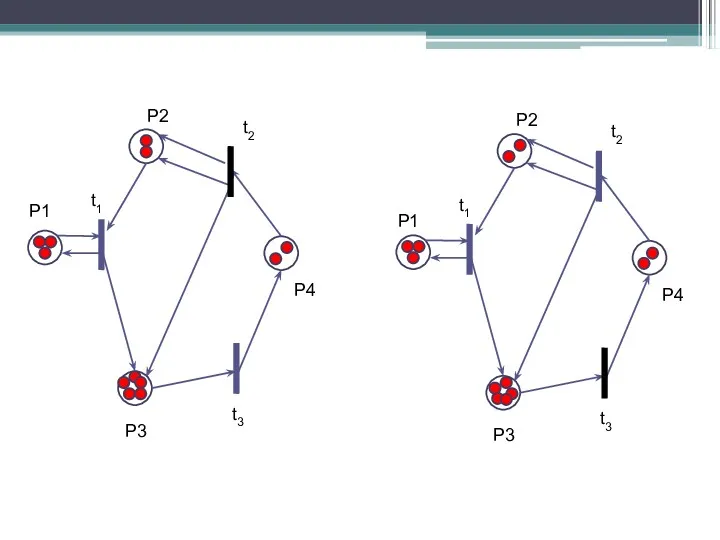
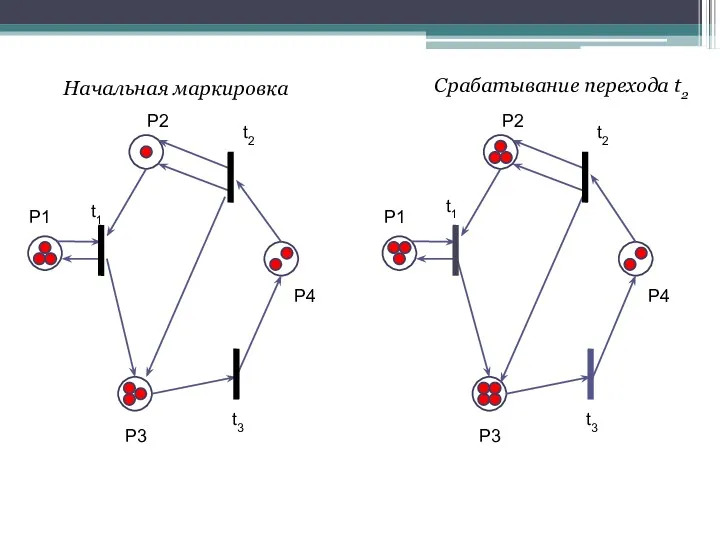
Переход t2
[μ0] ≥ [010]* D– = [010] ·
[3132] ≥ [0001]
Переход t2
[μ0] ≥ [010]* D– = [010] ·
[3132] ≥ [0001]
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t2
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t2
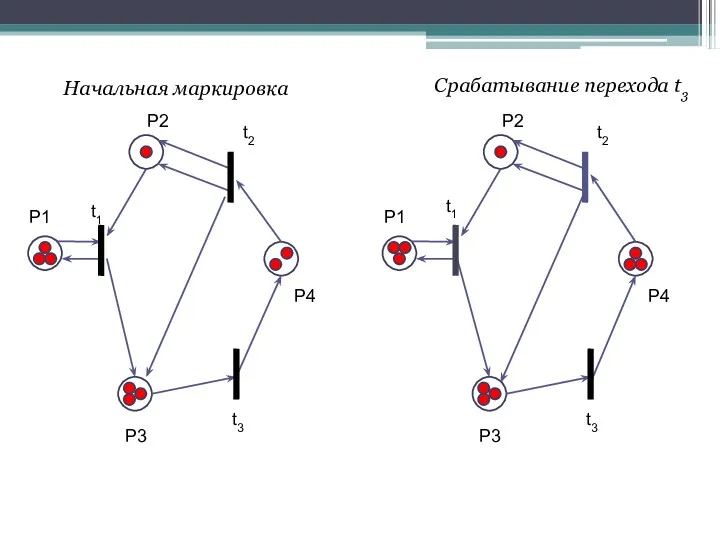
![Переход t3 [μ0] ≥ [001]* D– = [001] · [3132]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/200141/slide-20.jpg)
Переход t3
[μ0] ≥ [001]* D– = [001] ·
[3132] ≥ [0010]
Переход t3
[μ0] ≥ [001]* D– = [001] ·
[3132] ≥ [0010]
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t3
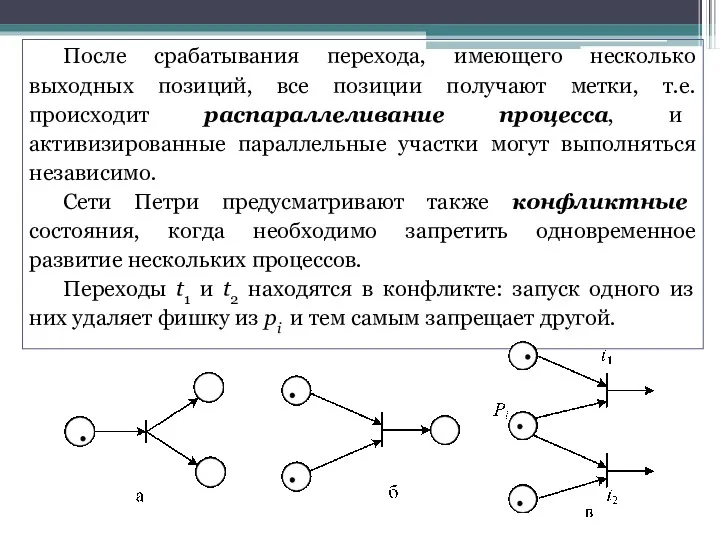
После срабатывания перехода, имеющего несколько выходных позиций, все позиции получают метки,
После срабатывания перехода, имеющего несколько выходных позиций, все позиции получают метки,
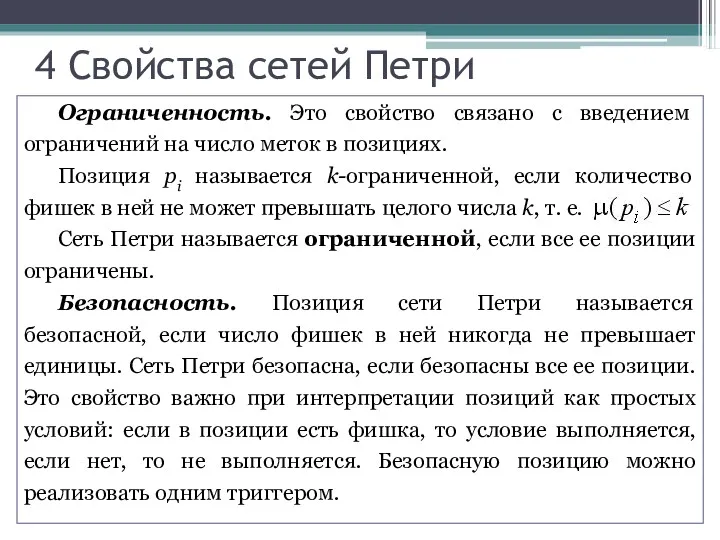
Ограниченность. Это свойство связано с введением ограничений на число меток в
Ограниченность. Это свойство связано с введением ограничений на число меток в
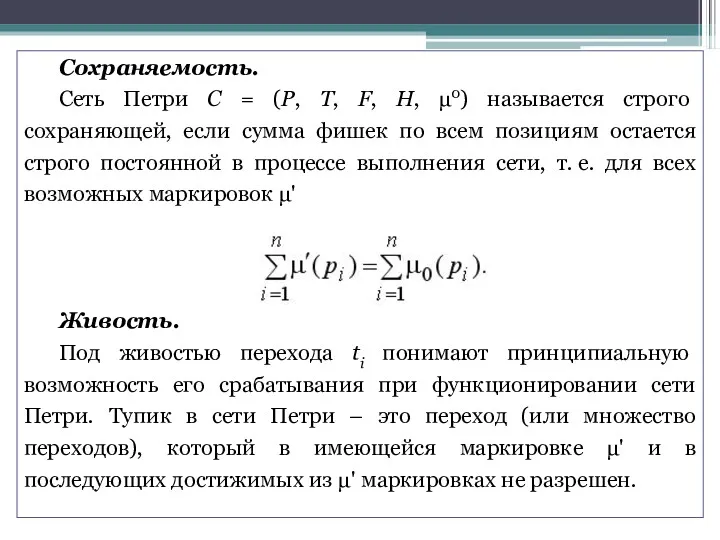
Сохраняемость.
Сеть Петри С = (P, T, F, H, μ0) называется
Сохраняемость.
Сеть Петри С = (P, T, F, H, μ0) называется
Достижимость.
Свойство достижимости используется при установлении возможности возникновения некоторой ситуации в
Достижимость.
Свойство достижимости используется при установлении возможности возникновения некоторой ситуации в
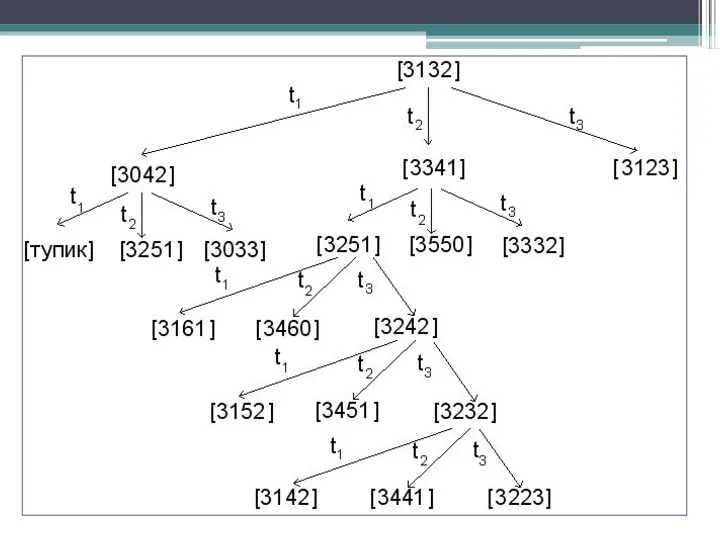
5 Анализ сетей Петри
Основная задача анализа сетей Петри – задача достижимости:
5 Анализ сетей Петри
Основная задача анализа сетей Петри – задача достижимости:
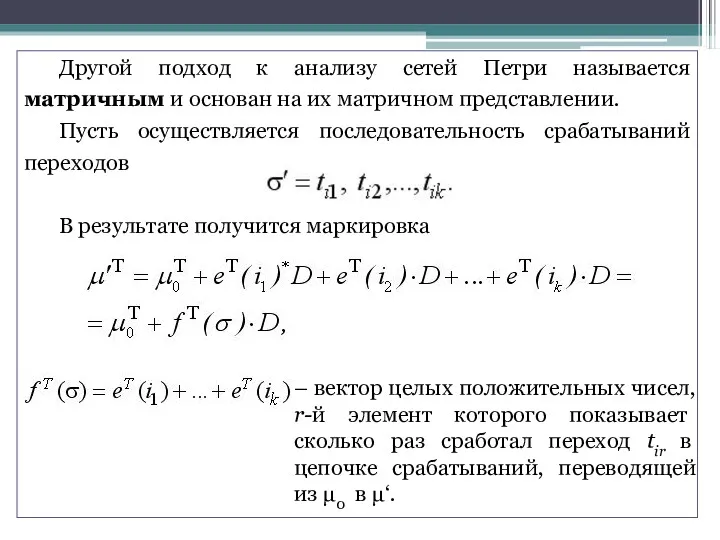
Другой подход к анализу сетей Петри называется матричным и основан на
Другой подход к анализу сетей Петри называется матричным и основан на
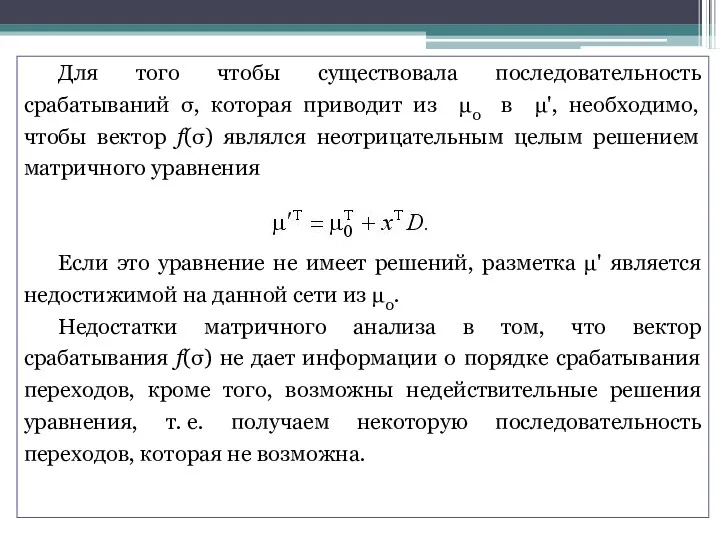
Для того чтобы существовала последовательность срабатываний σ, которая приводит из μ0
Для того чтобы существовала последовательность срабатываний σ, которая приводит из μ0
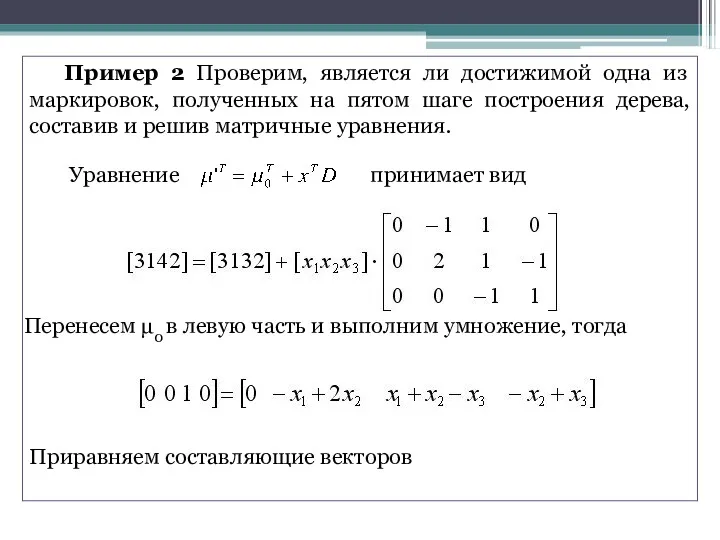
Пример 2 Проверим, является ли достижимой одна из маркировок, полученных на
Пример 2 Проверим, является ли достижимой одна из маркировок, полученных на
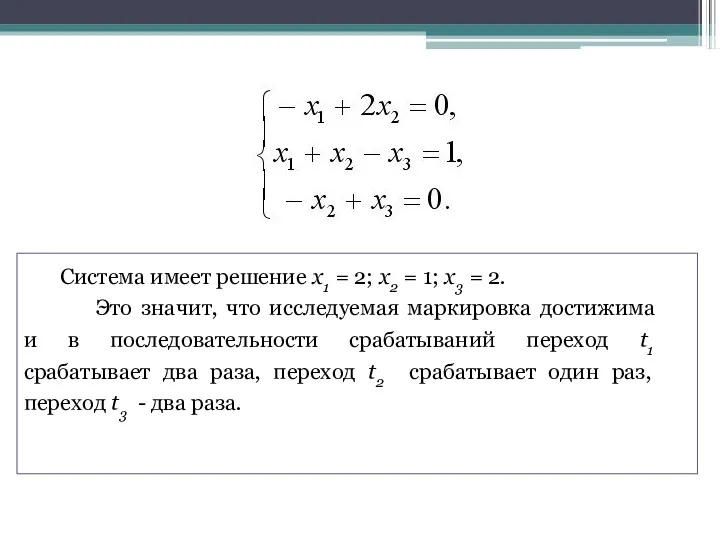
Система имеет решение x1 = 2; x2 = 1; x3 =
Система имеет решение x1 = 2; x2 = 1; x3 =
6 Подклассы и расширения сетей Петри
К подклассу автоматных графов относят сети
6 Подклассы и расширения сетей Петри
К подклассу автоматных графов относят сети
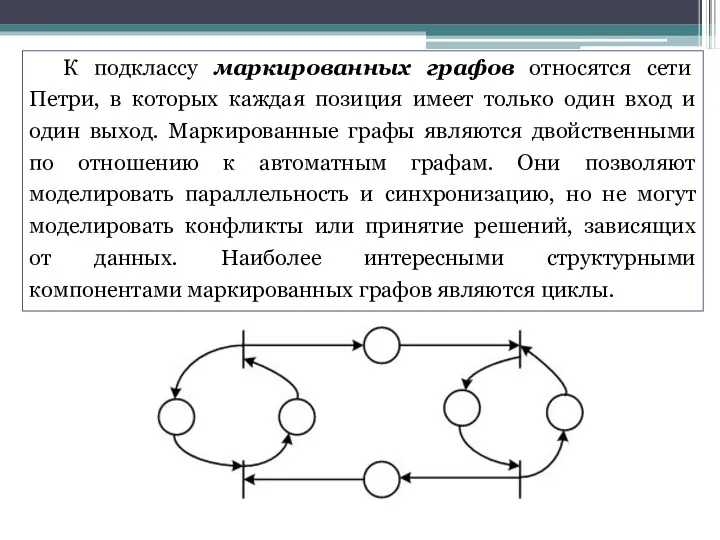
К подклассу маркированных графов относятся сети Петри, в которых каждая позиция
К подклассу маркированных графов относятся сети Петри, в которых каждая позиция
К подклассу устойчивых сетей Петри относятся сети, которые обладают следующим свойством:
К подклассу устойчивых сетей Петри относятся сети, которые обладают следующим свойством:
 Задачи на разрезание. Занятие 3
Задачи на разрезание. Занятие 3 Геометрия в начальной школе
Геометрия в начальной школе Случайная изменчивость. Примеры случайной изменчивости
Случайная изменчивость. Примеры случайной изменчивости Метод анализа иерархий (МАИ)
Метод анализа иерархий (МАИ) Решение двойных неравенств, решение неравенств с одной переменной. 8 класс
Решение двойных неравенств, решение неравенств с одной переменной. 8 класс Цилиндр. Получение цилиндра
Цилиндр. Получение цилиндра урок по математике
урок по математике Математике в военных целях. Занимательные задачи
Математике в военных целях. Занимательные задачи Тест по теме Сложение и вычитание с поддержкой макроса
Тест по теме Сложение и вычитание с поддержкой макроса Интегрирование по частям в определенном интеграле. Замена переменных при вычислении определенного интеграла. (Семинар 18)
Интегрирование по частям в определенном интеграле. Замена переменных при вычислении определенного интеграла. (Семинар 18) Разложение многочлена на множители
Разложение многочлена на множители Открытый урок по теме Умножение
Открытый урок по теме Умножение Проект Удивительный мир числ
Проект Удивительный мир числ Простые и сложные проценты
Простые и сложные проценты Презентация к уроку Скорость сближения. Скорость удаления 4 класс
Презентация к уроку Скорость сближения. Скорость удаления 4 класс Задачи на построение сечений
Задачи на построение сечений Занятие по познавательному развитию Мешок яблок Диск
Занятие по познавательному развитию Мешок яблок Диск Третий признак равенства треугольников
Третий признак равенства треугольников Деловая графика
Деловая графика Кладоискатели. Викторина по математике для 5-6 классов
Кладоискатели. Викторина по математике для 5-6 классов Геометрический смысл производной. Задачи типа В8 в ЕГЭ
Геометрический смысл производной. Задачи типа В8 в ЕГЭ Виды углов. 5 класс
Виды углов. 5 класс Исследование устойчивости особенной точки
Исследование устойчивости особенной точки Географические координаты. Координатная плоскость
Географические координаты. Координатная плоскость Плоска система збіжних сил
Плоска система збіжних сил Блеф клуб. Математическая игра для учащихся 7-х классов
Блеф клуб. Математическая игра для учащихся 7-х классов Скалярное произведение векторов
Скалярное произведение векторов ВПМ. Математичне програмування та дослідження операцій. Оптимізаційні задачі управління запасами. (Лекція 5)
ВПМ. Математичне програмування та дослідження операцій. Оптимізаційні задачі управління запасами. (Лекція 5)