- Основы биомеханики

Содержание
- 2. Основные принципы биомеханики Движение в суставах определены их формой Усилие мышечного сокращения направлено: а) вдоль мышцы
- 3. РЫЧАГ То – точка опоры или точка вращения Fd - точка приложения действующей (движущей) силы или
- 4. Плечо силы Плечо силы – это кратчайшее расстояние от точки опоры до линии действия силы: LFd
- 5. – величина, характеризующая вращательный эффект силы при действии ее на рычаг. M = F×L где F
- 6. Свойства рычага Условие равновесия рычага: Σ М = О или MFt = MFd При движении: это
- 7. Виды рычагов РЫЧАГ 1 РОДА= РАВНОВЕСИЯ Двуплечий (точки приложения сил располагаются по разные стороны от точки
- 8. РЫЧАГ СИЛЫ РЫЧАГИ 2 РОДА Одноплечие (точки приложения сил располагаются по одну сторону от точки опоры)
- 9. РЫЧАГ РАВНОВЕСИЯ (1 РОДА ) То – вертикаль из ЦТ проходит спереди от фронтальной оси сустава
- 10. РЫЧАГ РАВНОВЕСИЯ (1 РОДА ) Равновесие - MFt = MFd силы направлены в одну сторону Сгибание
- 11. То – головки плюсневых костей Fd – направление действующей силы Ft – направление силы тяжести LFt,
- 12. выигрыш - в амплитуде движения, в скорости, ловкости минус - малая действующая сила. РЫЧАГ СКОРОСТИ (2РОДА)
- 13. РЫЧАГ СКОРОСТИ (2РОДА)
- 14. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ 1. Физиологический поперечник – сумма площадей поперечных сечений всех мышечных
- 15. Сила мышцы, имеющей площадь поперечного сечения 1 см2 примерно равна 10 кг Для сгибателей предплечья –
- 16. Для жевательных мышц, поднимающих нижнюю челюсть – 390-400 кг. Площадь поперечного сечения трех пар мышц составляет
- 17. 2. Количество моторных единиц, участвующих в сокращении. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ Для включения большого
- 18. 2. Количество моторных единиц, участвующих в сокращении. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ Для включения большого
- 19. 2. Количество моторных единиц, участвующих в сокращении. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ Для включения большого
- 20. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ 3.Состав мышечных волокон В одной моторной единице содержится один вид
- 21. У девятикратного олимпийского чемпиона Карла Льюиса в мышцах ног белых волокон было более 70%. Поэтому в
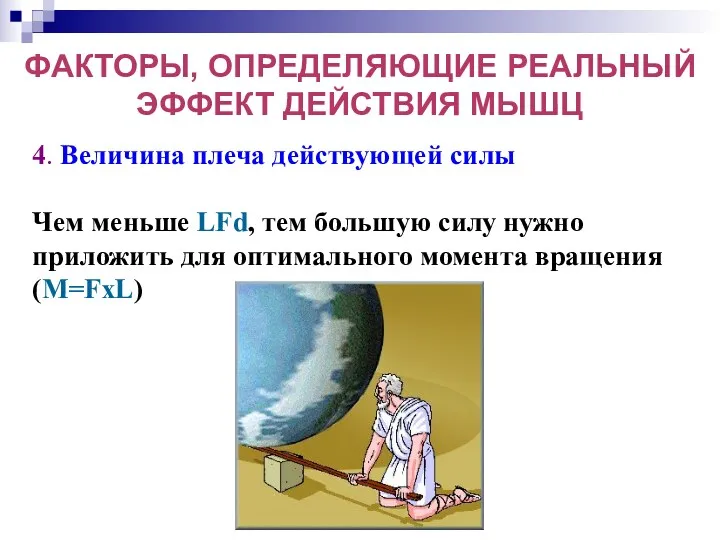
- 22. ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ 4. Величина плеча действующей силы Чем меньше LFd, тем большую
- 23. 5. Угол прикрепления мышцы ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ Оптимально при 90º
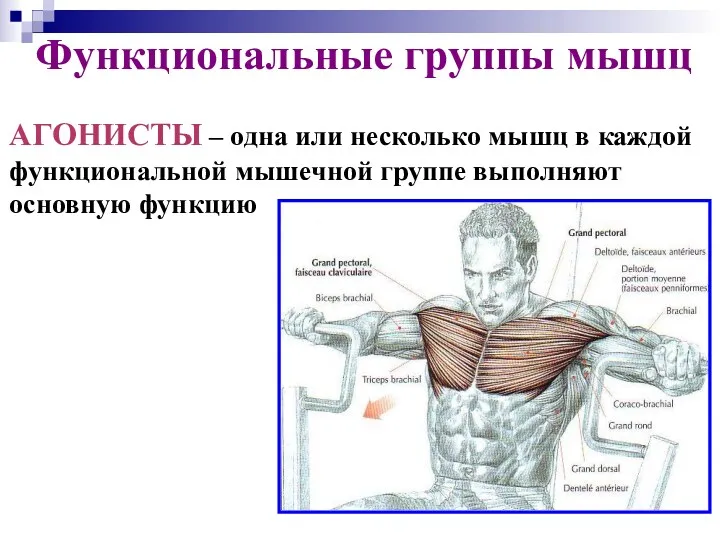
- 24. Функциональные группы мышц АГОНИСТЫ – одна или несколько мышц в каждой функциональной мышечной группе выполняют основную
- 25. СИНЕPГИСТЫ - мышцы одного сустава, которые осуществляют функцию в одном направлении Функциональные группы мышц
- 26. АНТАГОНИСТЫ - мышцы одного сустава, которые осуществляют работу в противоположных направлениях. Функциональные группы мышц
- 27. Деление на группы не постоянно и мышцы могут быть при одном движении синергистами, а при другом
- 28. 1. Односуставные мышцы По отношению к суставам: m. deltoideus m. brachialis
- 29. 2. Многосуставные мышцы По отношению к суставам: m. biceps brachii m. quadriceps femoris
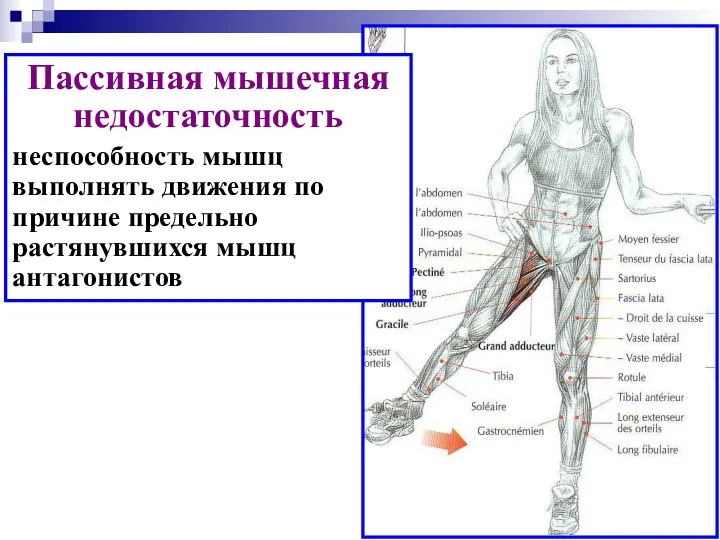
- 30. Пассивная мышечная недостаточность неспособность мышц выполнять движения по причине предельно растянувшихся мышц антагонистов
- 31. Активная мышечная недостаточность многосуставная мышца не может произвести движение в полном объеме во всех суставах (т.к.
- 32. Мышечная координация движений В каждом движении участвуют несколько мышц, являющихся синергистами и антагонистами. Во время сокращений
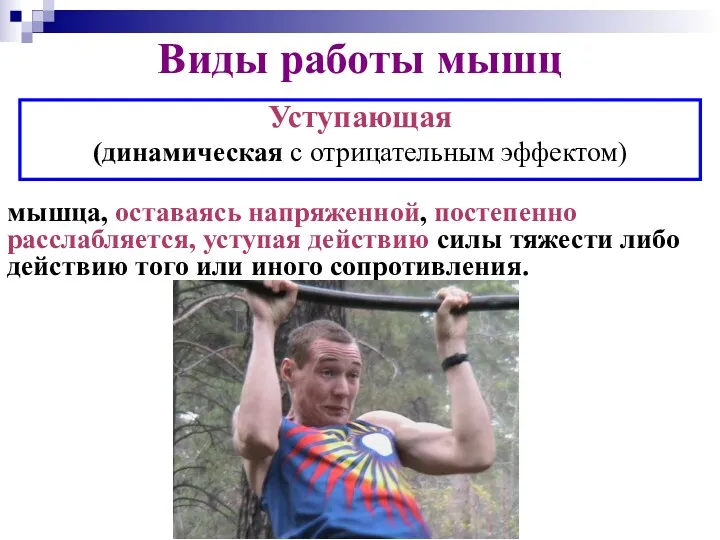
- 33. Виды работы мышц Уступающая (динамическая с отрицательным эффектом) мышца, оставаясь напряженной, постепенно расслабляется, уступая действию силы
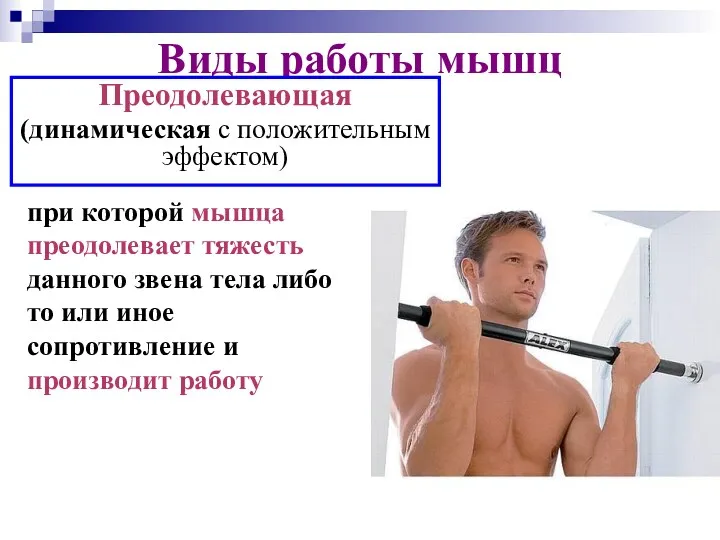
- 34. Виды работы мышц при которой мышца преодолевает тяжесть данного звена тела либо то или иное сопротивление
- 35. Виды работы мышц Удерживающая (статическая) происходит уравновешивание действия сопротивления, в результате чего движение отсутствует
- 36. Любое тело свободно перемещается в пространстве, обладает шестью степенями свободы: 1. вверх и вниз 2. вперед
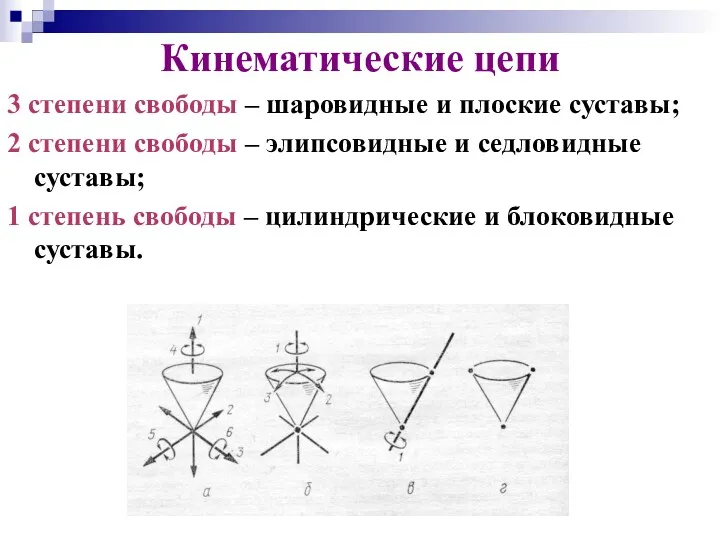
- 37. Кинематические цепи 3 степени свободы – шаровидные и плоские суставы; 2 степени свободы – элипсовидные и
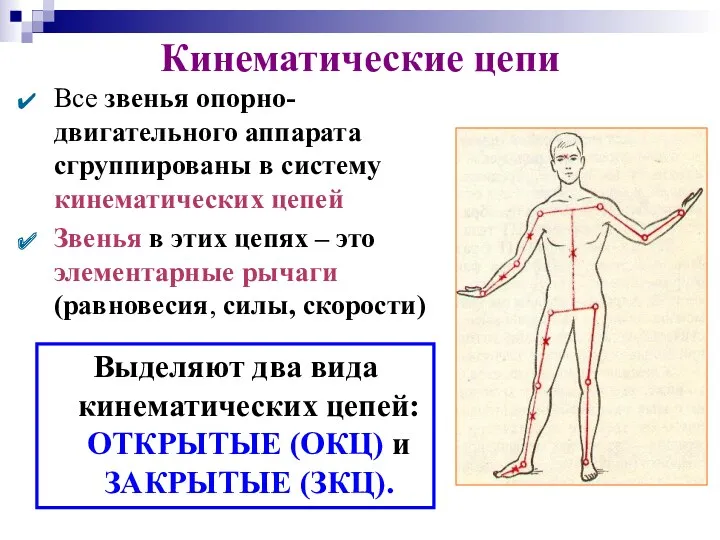
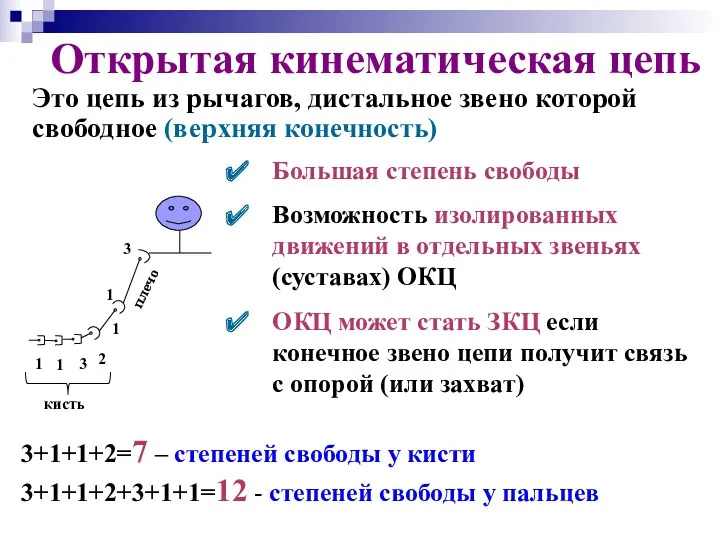
- 39. Кинематические цепи Все звенья опорно-двигательного аппарата сгруппированы в систему кинематических цепей Звенья в этих цепях –
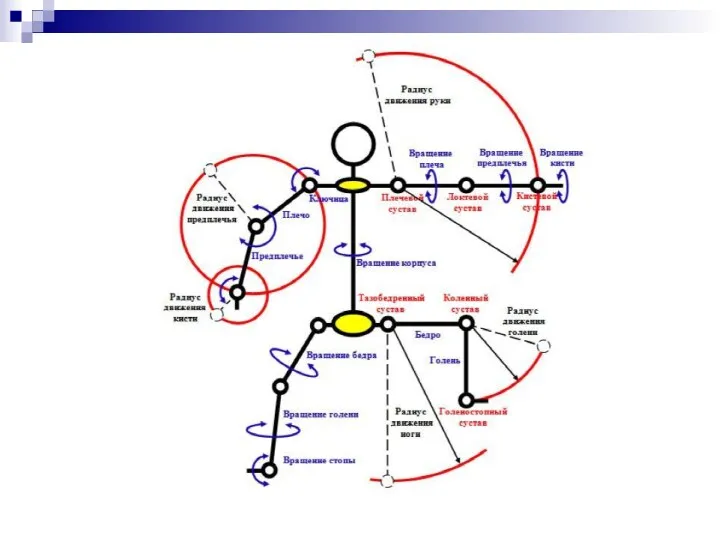
- 40. 3 1 1 2 3 1 1 3+1+1+2=7 – степеней свободы у кисти 3+1+1+2+3+1+1=12 - степеней
- 42. Закрытая кинематическая цепь Невозможны изолированные движения в одном суставе Изменение положения в одном суставе приводит к
- 43. Постоянно закрытая кинематическая цепь Грудная клетка человека состоит из 72 костных и хрящевых элементов, связанных подвижно
- 44. ЦЕНТР ТЯЖЕСТИ геометрическая точка тела, через которую проходит равнодействующая всех сил тяжести, действующих на тело при
- 45. Расположение ОЦТ определяют: 1. Возраст: новорожденные – Th5-6 2 года – L1 5 лет - L3
- 46. Расположение ОЦТ определяют: 2. Пол мужчины – L5 (L3-S5); женщины – S1 (L5 – Co1).
- 47. Расположение ОЦТ определяют: 3. Конституция, физическое развитие.
- 48. Расположение ОЦТ определяют: 4. Положение тела
- 49. 5. Фазы дыхания, перистальтика кишечника Расположение ОЦТ определяют:
- 50. Виды равновесия тела 1. Устойчивое ОЦТ ниже площади опоры Если тело вывести из равновесия, оно под
- 51. 2. Неустойчивое ОЦТ выше площади опоры. Если тело вывести из равновесия, оно падает под действием силы
- 52. Условия устойчивости тела 1. Достаточная площадь опоры
- 53. Условия устойчивости тела 2. Высота расположения ОЦТ чем ниже, тем больше устойчивость
- 54. 3. Вертикаль из ОЦТ должна падать на площадь опоры чем ближе к центру, тем больше устойчивость
- 55. УГОЛ УСТОЙЧИВОСТИ – это угол между вертикалью из ОЦТ и прямой, проведенной из ОЦТ к краю
- 56. Осанка – привычная поза непринужденно, стоящего человека. Держит прямо голову и туловище без активного напряжения мышц.
- 57. Виды осанки (по Аксенову) 1. Нормальная. Степень выраженности лордозов и кифозов равномерное.
- 58. Виды осанки (по Аксенову) 2. Выпрямленная. Слабо выражены изгибы.
- 59. Виды осанки (по Аксенову) 3. Сутуловатая. Большой шейный лордоз, маленький грудной кифоз
- 60. Виды осанки (по Аксенову) 4. Лордотическая. Чрезвычайно развит поясничный лордоз.
- 61. Виды осанки (по Аксенову) 5. Кифотическая. Особенно сильно развит грудной кифоз.
- 63. Скачать презентацию
Основные принципы биомеханики
Движение в суставах определены их формой
Усилие мышечного
Основные принципы биомеханики
Движение в суставах определены их формой
Усилие мышечного

РЫЧАГ
То – точка опоры или точка вращения
Fd - точка приложения действующей
РЫЧАГ
То – точка опоры или точка вращения
Fd - точка приложения действующей
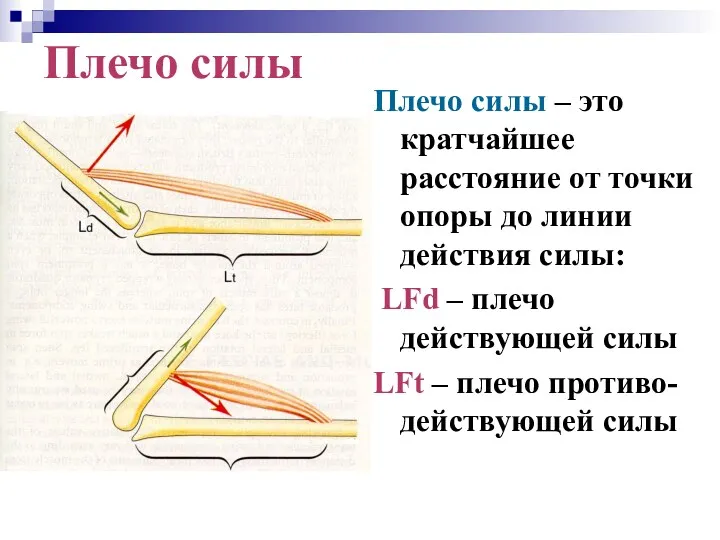
Плечо силы
Плечо силы – это кратчайшее расстояние от точки опоры до
Плечо силы
Плечо силы – это кратчайшее расстояние от точки опоры до
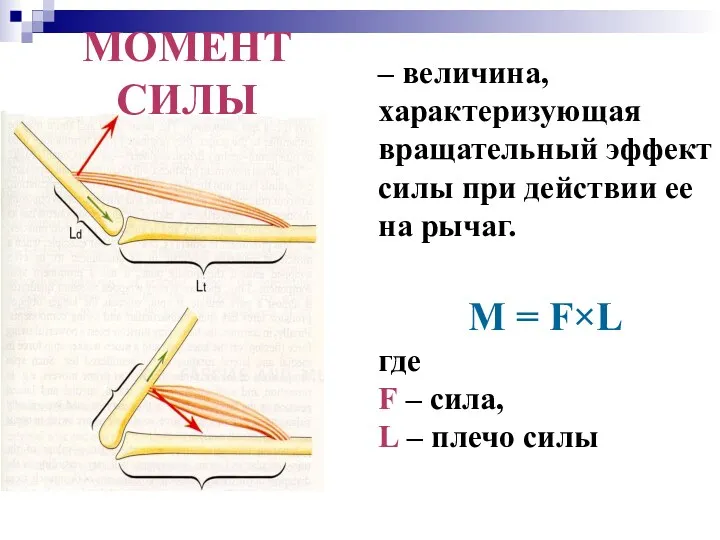
– величина, характеризующая вращательный эффект силы при действии ее на рычаг.
– величина, характеризующая вращательный эффект силы при действии ее на рычаг.
Свойства рычага
Условие равновесия рычага:
Σ М = О или MFt =
Свойства рычага
Условие равновесия рычага:
Σ М = О или MFt =
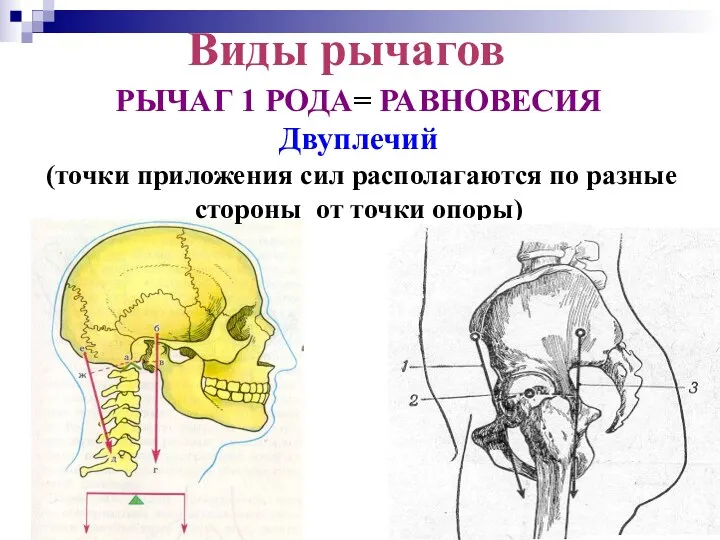
Виды рычагов
РЫЧАГ 1 РОДА= РАВНОВЕСИЯ
Двуплечий
(точки приложения сил располагаются по
Виды рычагов
РЫЧАГ 1 РОДА= РАВНОВЕСИЯ
Двуплечий
(точки приложения сил располагаются по
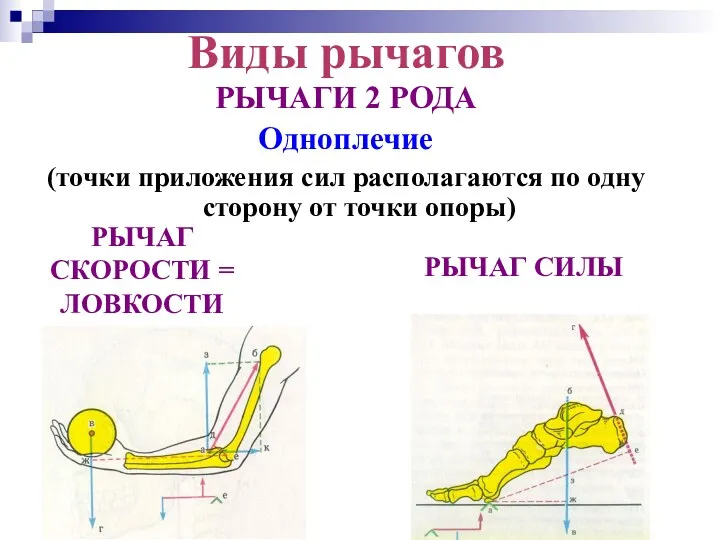
РЫЧАГ СИЛЫ
РЫЧАГИ 2 РОДА
Одноплечие
(точки приложения сил располагаются по одну сторону
РЫЧАГ СИЛЫ
РЫЧАГИ 2 РОДА
Одноплечие
(точки приложения сил располагаются по одну сторону
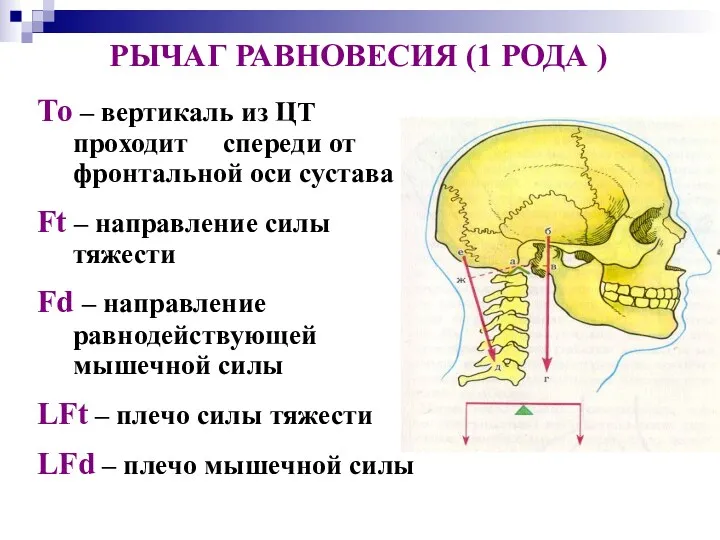
РЫЧАГ РАВНОВЕСИЯ (1 РОДА )
То – вертикаль из ЦТ проходит спереди
РЫЧАГ РАВНОВЕСИЯ (1 РОДА )
То – вертикаль из ЦТ проходит спереди
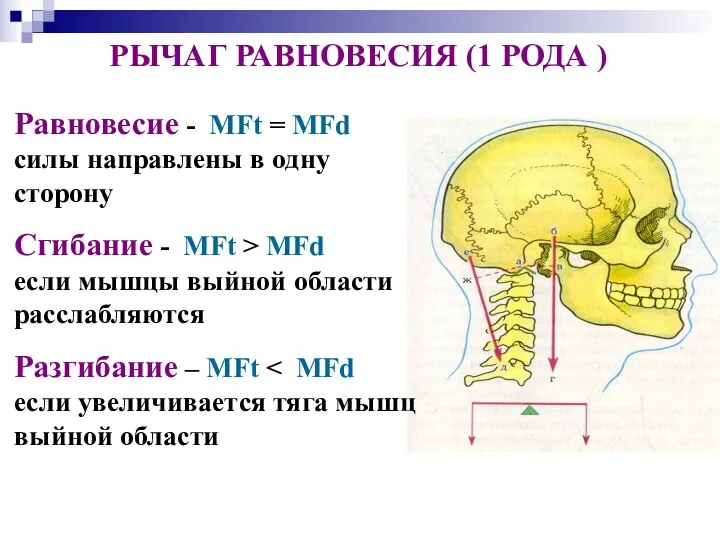
РЫЧАГ РАВНОВЕСИЯ (1 РОДА )
Равновесие - MFt = MFd силы направлены
РЫЧАГ РАВНОВЕСИЯ (1 РОДА )
Равновесие - MFt = MFd силы направлены
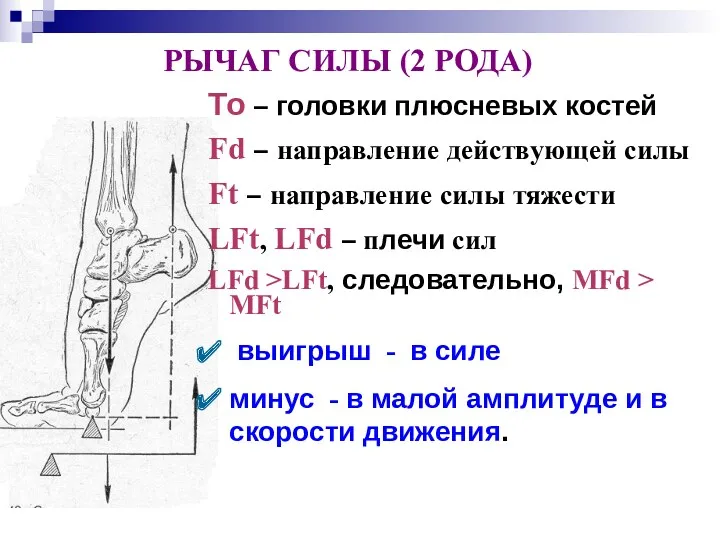
То – головки плюсневых костей
Fd – направление действующей силы
Ft – направление
То – головки плюсневых костей
Fd – направление действующей силы
Ft – направление
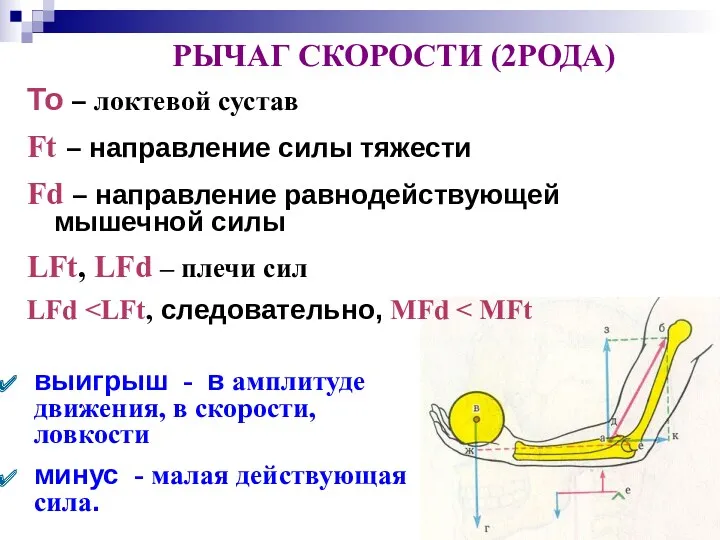
выигрыш - в амплитуде движения, в скорости, ловкости
минус - малая действующая
выигрыш - в амплитуде движения, в скорости, ловкости
минус - малая действующая
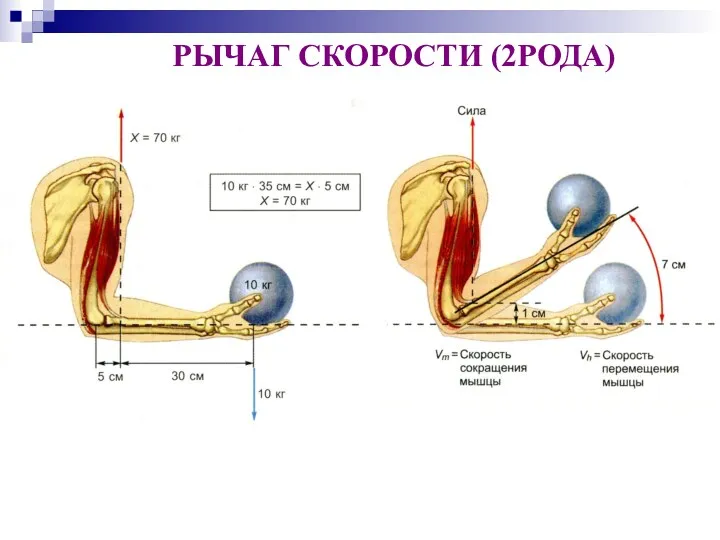
РЫЧАГ СКОРОСТИ (2РОДА)
РЫЧАГ СКОРОСТИ (2РОДА)

ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
1. Физиологический поперечник – сумма площадей
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
1. Физиологический поперечник – сумма площадей
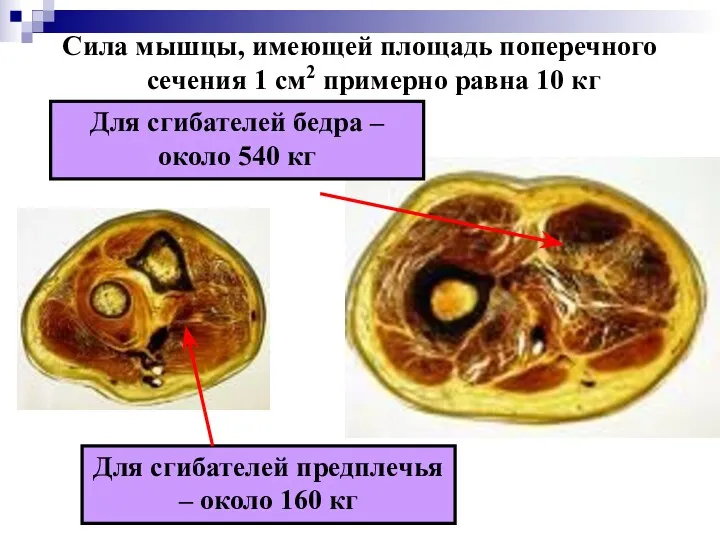
Сила мышцы, имеющей площадь поперечного сечения 1 см2 примерно равна 10
Сила мышцы, имеющей площадь поперечного сечения 1 см2 примерно равна 10

Для жевательных мышц, поднимающих нижнюю челюсть – 390-400 кг. Площадь поперечного
Для жевательных мышц, поднимающих нижнюю челюсть – 390-400 кг. Площадь поперечного
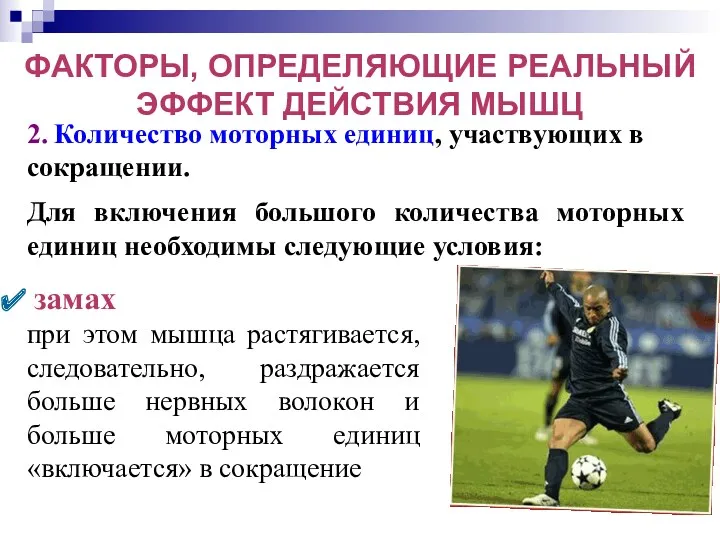
2. Количество моторных единиц, участвующих в сокращении.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ
2. Количество моторных единиц, участвующих в сокращении.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ
2. Количество моторных единиц, участвующих в сокращении.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ
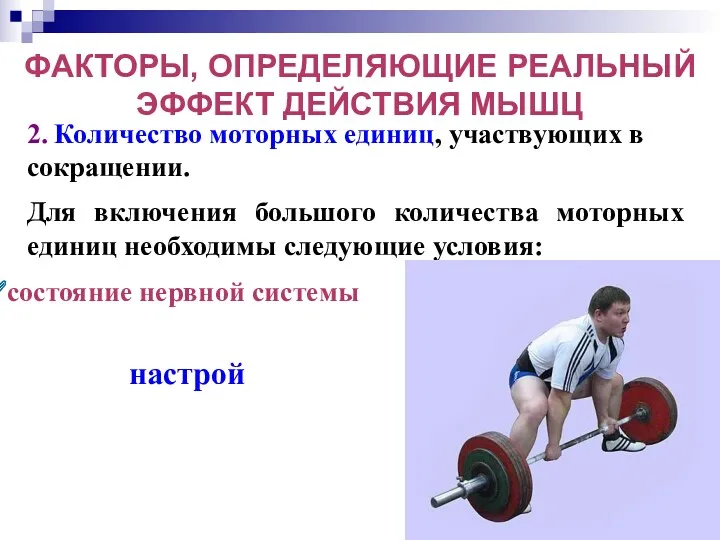
2. Количество моторных единиц, участвующих в сокращении.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ
2. Количество моторных единиц, участвующих в сокращении.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ
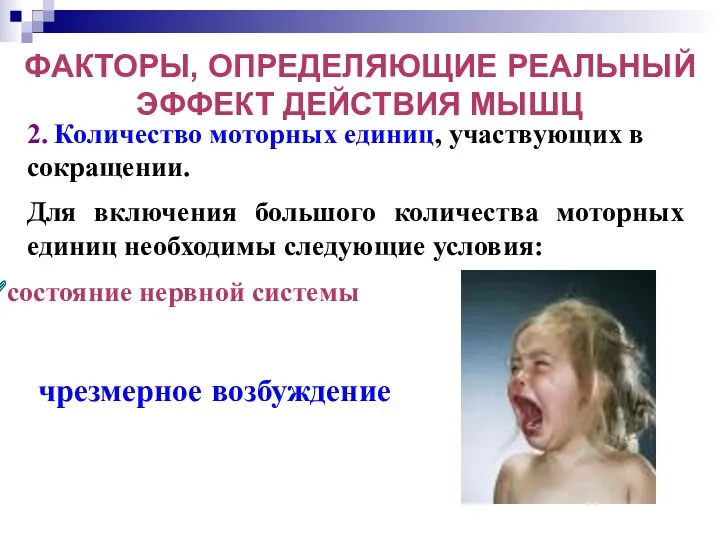
2. Количество моторных единиц, участвующих в сокращении.
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
3.Состав мышечных волокон
В одной моторной единице
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
3.Состав мышечных волокон
В одной моторной единице
У девятикратного олимпийского чемпиона Карла Льюиса в мышцах ног белых волокон
У девятикратного олимпийского чемпиона Карла Льюиса в мышцах ног белых волокон
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
4. Величина плеча действующей силы
Чем
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
4. Величина плеча действующей силы
Чем
5. Угол прикрепления мышцы
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
Оптимально при 90º
5. Угол прикрепления мышцы
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ РЕАЛЬНЫЙ ЭФФЕКТ ДЕЙСТВИЯ МЫШЦ
Оптимально при 90º
Функциональные группы мышц
АГОНИСТЫ – одна или несколько мышц в каждой функциональной
Функциональные группы мышц
АГОНИСТЫ – одна или несколько мышц в каждой функциональной

СИНЕPГИСТЫ - мышцы одного сустава, которые осуществляют функцию в одном направлении
Функциональные
СИНЕPГИСТЫ - мышцы одного сустава, которые осуществляют функцию в одном направлении
Функциональные
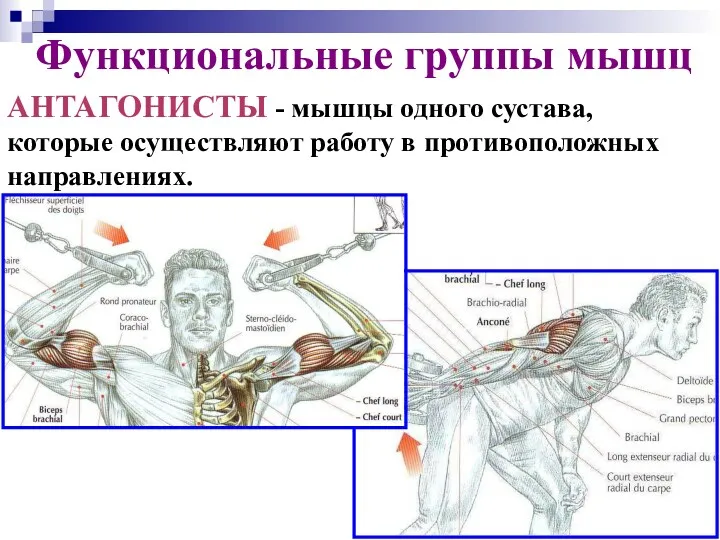
АНТАГОНИСТЫ - мышцы одного сустава, которые осуществляют работу в противоположных направлениях.
Функциональные
АНТАГОНИСТЫ - мышцы одного сустава, которые осуществляют работу в противоположных направлениях.
Функциональные
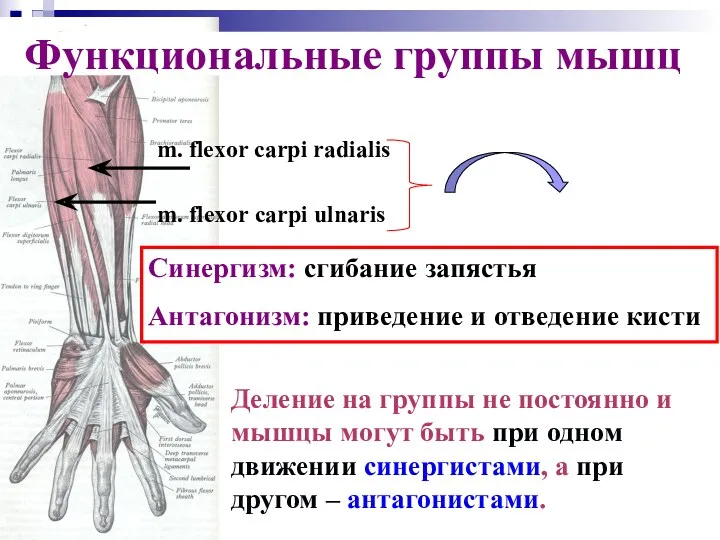
Деление на группы не постоянно и мышцы могут быть при одном
Деление на группы не постоянно и мышцы могут быть при одном
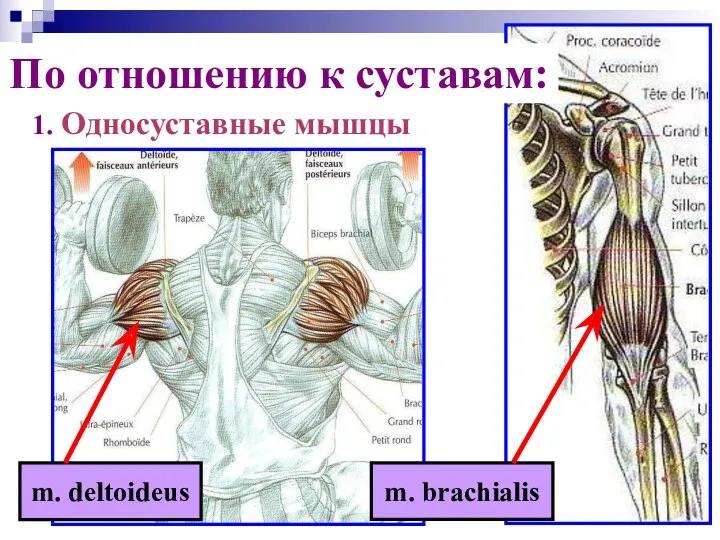
1. Односуставные мышцы
По отношению к суставам:
m. deltoideus
m. brachialis
1. Односуставные мышцы
По отношению к суставам:
m. deltoideus
m. brachialis
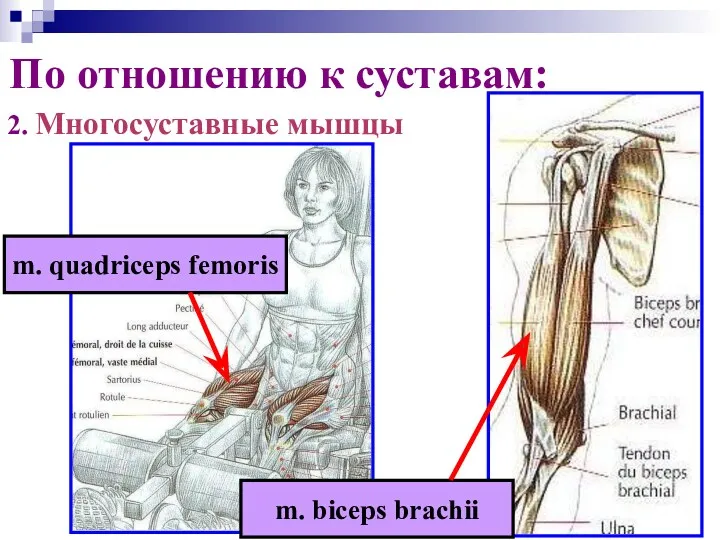
2. Многосуставные мышцы
По отношению к суставам:
m. biceps brachii
m. quadriceps femoris
2. Многосуставные мышцы
По отношению к суставам:
m. biceps brachii
m. quadriceps femoris
Пассивная мышечная недостаточность
неспособность мышц выполнять движения по причине предельно растянувшихся
Пассивная мышечная недостаточность
неспособность мышц выполнять движения по причине предельно растянувшихся

Активная мышечная недостаточность
многосуставная мышца не может произвести движение в полном
Активная мышечная недостаточность
многосуставная мышца не может произвести движение в полном
Мышечная координация движений
В каждом движении участвуют несколько мышц, являющихся синергистами и
Мышечная координация движений
В каждом движении участвуют несколько мышц, являющихся синергистами и
Виды работы мышц
Уступающая
(динамическая с отрицательным эффектом)
мышца, оставаясь напряженной, постепенно
Виды работы мышц
Уступающая
(динамическая с отрицательным эффектом)
мышца, оставаясь напряженной, постепенно
Виды работы мышц
при которой мышца преодолевает тяжесть данного звена тела либо
Виды работы мышц
при которой мышца преодолевает тяжесть данного звена тела либо

Виды работы мышц
Удерживающая
(статическая)
происходит уравновешивание действия сопротивления, в результате чего движение отсутствует
Виды работы мышц
Удерживающая
(статическая)
происходит уравновешивание действия сопротивления, в результате чего движение отсутствует
Любое тело свободно перемещается в пространстве, обладает шестью степенями свободы:
1. вверх
Любое тело свободно перемещается в пространстве, обладает шестью степенями свободы:
1. вверх
Кинематические цепи
3 степени свободы – шаровидные и плоские суставы;
2 степени свободы
Кинематические цепи
3 степени свободы – шаровидные и плоские суставы;
2 степени свободы
Кинематические цепи
Все звенья опорно-двигательного аппарата сгруппированы в систему кинематических цепей
Звенья в
Кинематические цепи
Все звенья опорно-двигательного аппарата сгруппированы в систему кинематических цепей
Звенья в
3
1
1
2
3
1
1
3+1+1+2=7 – степеней свободы у кисти
3+1+1+2+3+1+1=12 - степеней свободы у пальцев
кисть
плечо
Это
3
1
1
2
3
1
1
3+1+1+2=7 – степеней свободы у кисти
3+1+1+2+3+1+1=12 - степеней свободы у пальцев
кисть
плечо
Это
Закрытая кинематическая цепь
Невозможны изолированные движения в одном суставе
Изменение положения в одном
Закрытая кинематическая цепь
Невозможны изолированные движения в одном суставе
Изменение положения в одном
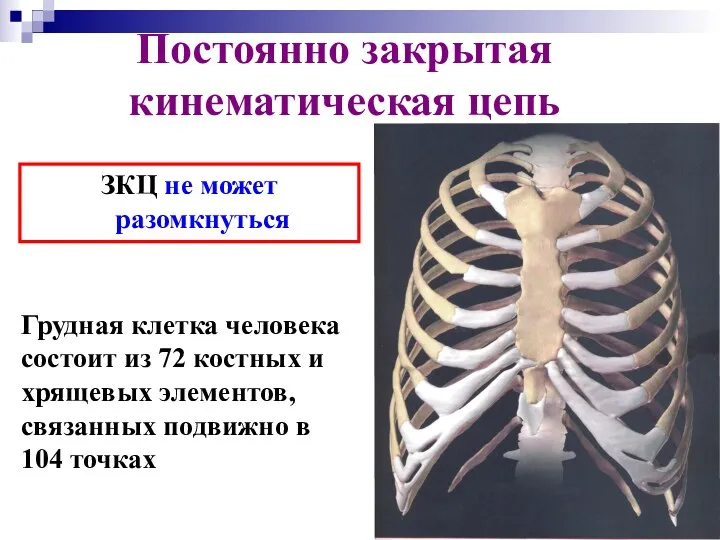
Постоянно закрытая кинематическая цепь
Грудная клетка человека состоит из 72 костных и
Постоянно закрытая кинематическая цепь
Грудная клетка человека состоит из 72 костных и
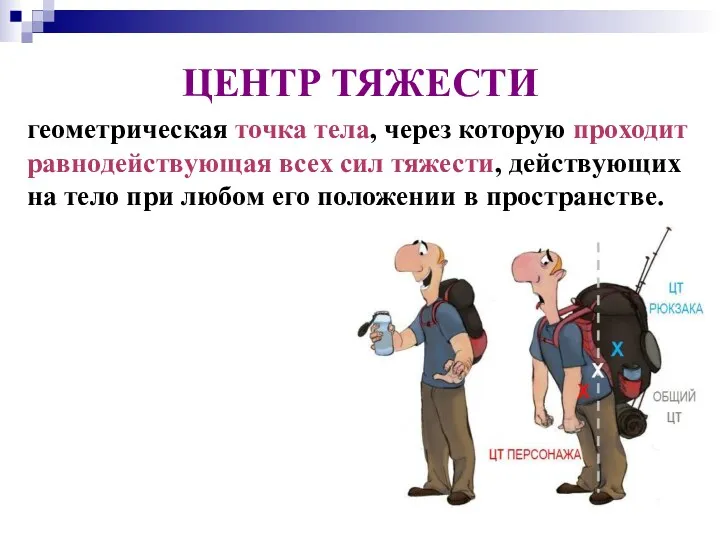
ЦЕНТР ТЯЖЕСТИ
геометрическая точка тела, через которую проходит равнодействующая всех сил
ЦЕНТР ТЯЖЕСТИ
геометрическая точка тела, через которую проходит равнодействующая всех сил
Расположение ОЦТ определяют:
1. Возраст:
новорожденные – Th5-6
2 года – L1
5 лет
Расположение ОЦТ определяют:
1. Возраст:
новорожденные – Th5-6
2 года – L1
5 лет

Расположение ОЦТ определяют:
2. Пол
мужчины –
L5 (L3-S5);
женщины –
S1 (L5 –
Расположение ОЦТ определяют:
2. Пол
мужчины –
L5 (L3-S5);
женщины –
S1 (L5 –

Расположение ОЦТ определяют:
3. Конституция,
физическое развитие.
Расположение ОЦТ определяют:
3. Конституция,
физическое развитие.

Расположение ОЦТ определяют:
4. Положение тела
Расположение ОЦТ определяют:
4. Положение тела

5. Фазы дыхания, перистальтика кишечника
Расположение ОЦТ определяют:
5. Фазы дыхания, перистальтика кишечника
Расположение ОЦТ определяют:
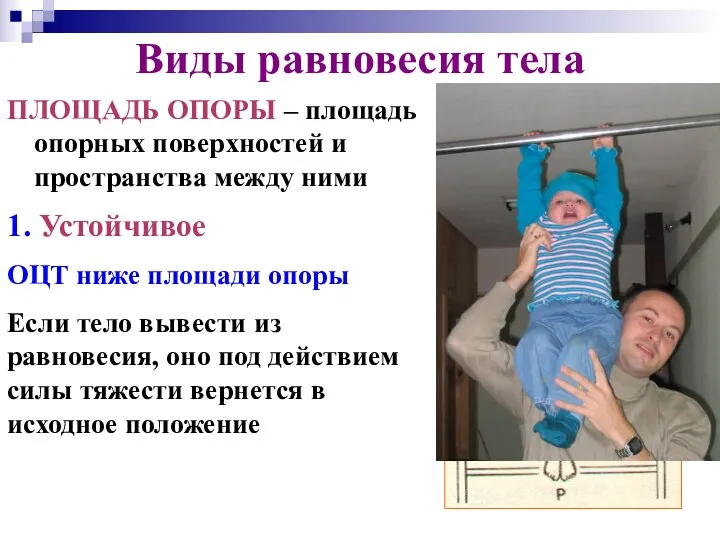
Виды равновесия тела
1. Устойчивое
ОЦТ ниже площади опоры
Если тело вывести из
Виды равновесия тела
1. Устойчивое
ОЦТ ниже площади опоры
Если тело вывести из
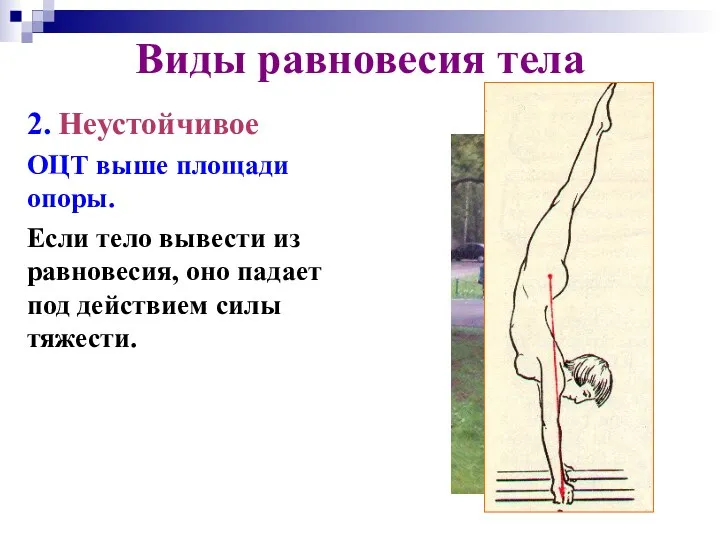
2. Неустойчивое
ОЦТ выше площади опоры.
Если тело вывести из равновесия, оно
2. Неустойчивое
ОЦТ выше площади опоры.
Если тело вывести из равновесия, оно
Условия устойчивости тела
1. Достаточная площадь опоры
Условия устойчивости тела
1. Достаточная площадь опоры

Условия устойчивости тела
2. Высота расположения ОЦТ чем ниже, тем больше устойчивость
Условия устойчивости тела
2. Высота расположения ОЦТ чем ниже, тем больше устойчивость
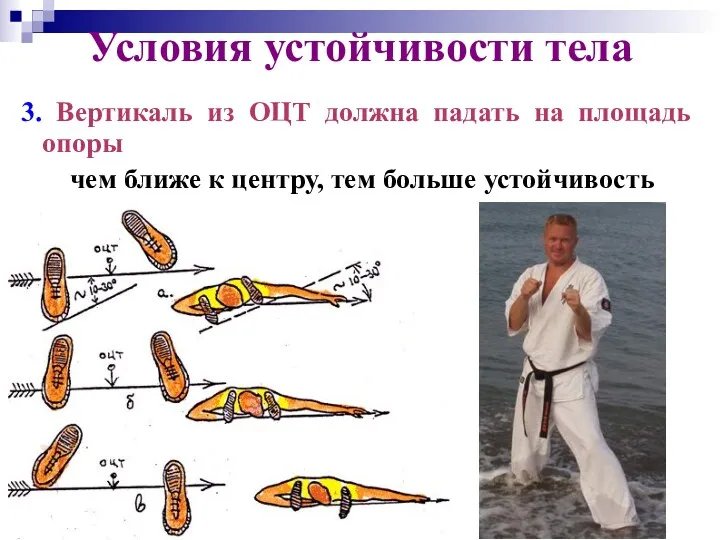
3. Вертикаль из ОЦТ должна падать на площадь опоры
чем ближе
3. Вертикаль из ОЦТ должна падать на площадь опоры
чем ближе
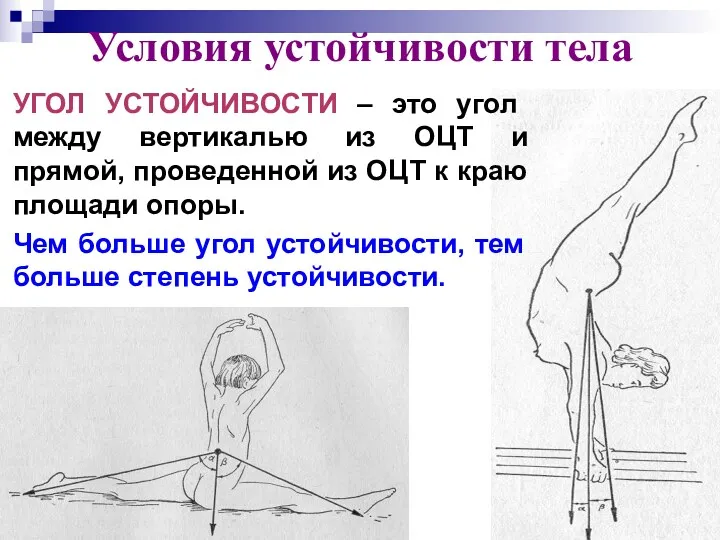
УГОЛ УСТОЙЧИВОСТИ – это угол между вертикалью из ОЦТ и прямой,
УГОЛ УСТОЙЧИВОСТИ – это угол между вертикалью из ОЦТ и прямой,

Осанка – привычная поза непринужденно, стоящего человека. Держит прямо голову и
Осанка – привычная поза непринужденно, стоящего человека. Держит прямо голову и
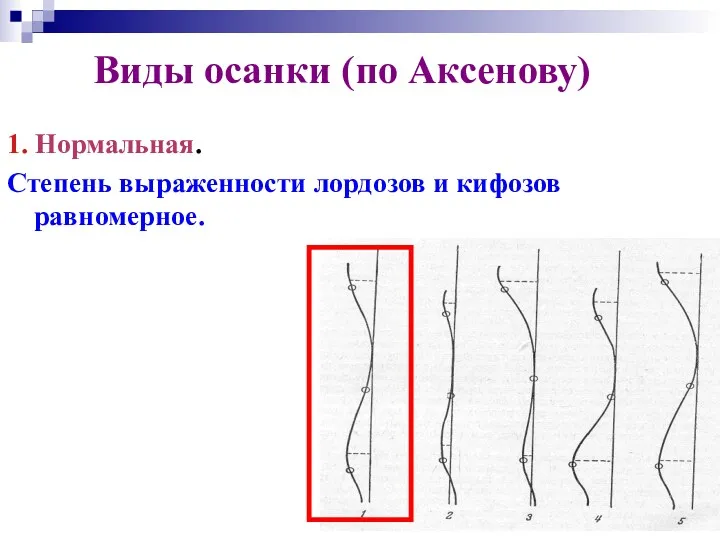
Виды осанки (по Аксенову)
1. Нормальная.
Степень выраженности лордозов и кифозов равномерное.
Виды осанки (по Аксенову)
1. Нормальная.
Степень выраженности лордозов и кифозов равномерное.

Виды осанки (по Аксенову)
2. Выпрямленная.
Слабо выражены изгибы.
Виды осанки (по Аксенову)
2. Выпрямленная.
Слабо выражены изгибы.
Виды осанки (по Аксенову)
3. Сутуловатая.
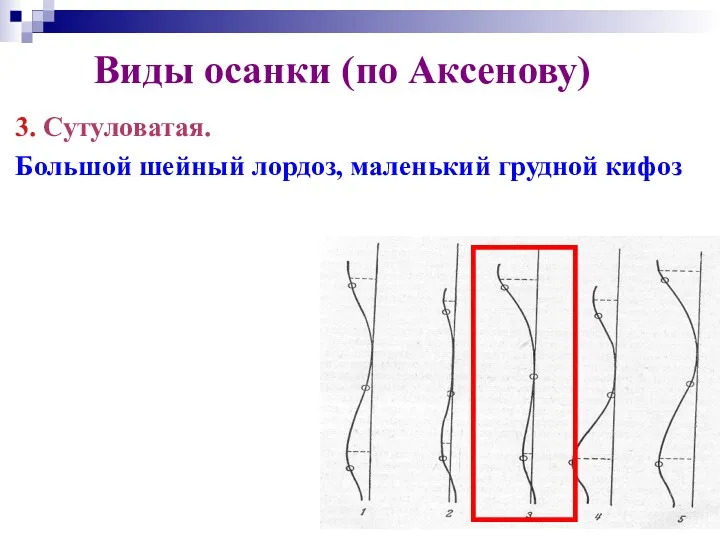
Большой шейный лордоз, маленький грудной кифоз
Виды осанки (по Аксенову)
3. Сутуловатая.
Большой шейный лордоз, маленький грудной кифоз

Виды осанки (по Аксенову)
4. Лордотическая.
Чрезвычайно развит поясничный лордоз.
Виды осанки (по Аксенову)
4. Лордотическая.
Чрезвычайно развит поясничный лордоз.
Виды осанки (по Аксенову)
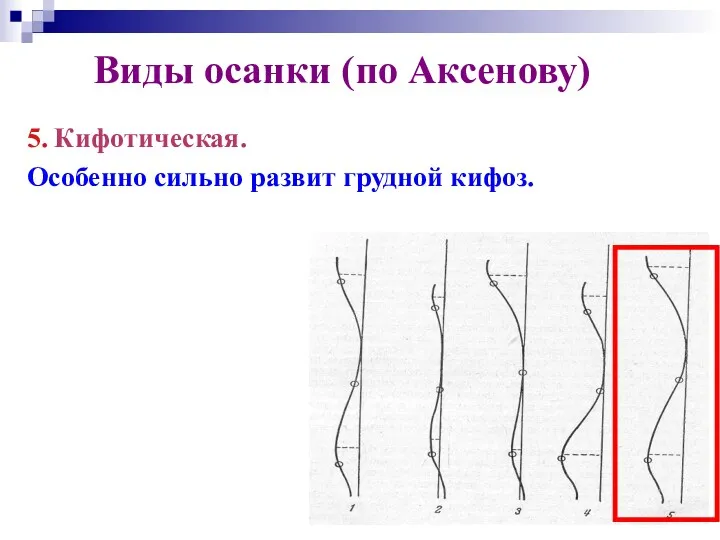
5. Кифотическая.
Особенно сильно развит грудной кифоз.
Виды осанки (по Аксенову)
5. Кифотическая.
Особенно сильно развит грудной кифоз.
 Топографическая анатомия верхней конечности
Топографическая анатомия верхней конечности Перфторан. История открытия голубой крови
Перфторан. История открытия голубой крови Слайд-лекция №20. Антибиотики 1. Пенициллины, Цефалоспорины, Maкролиды
Слайд-лекция №20. Антибиотики 1. Пенициллины, Цефалоспорины, Maкролиды Рациональное питание
Рациональное питание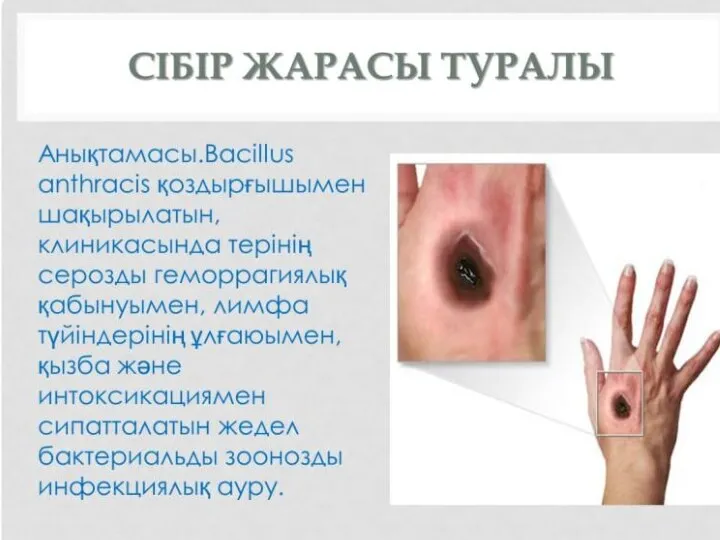 Сібір жарасы туралы
Сібір жарасы туралы Черепно-мозговая травма
Черепно-мозговая травма Дәрілер технологиясы ғылым ретінде. Дәрілер технологиясының міндеттері. Дәрілік препараттар өндірісін мемлекеттік нормалау
Дәрілер технологиясы ғылым ретінде. Дәрілер технологиясының міндеттері. Дәрілік препараттар өндірісін мемлекеттік нормалау Санитарно-эпидемиологические требования к организациям, осуществляющим медицинскую деятельность
Санитарно-эпидемиологические требования к организациям, осуществляющим медицинскую деятельность Огнестрельные и неогнестрельные ранения
Огнестрельные и неогнестрельные ранения Различные виды недержания мочи, диагностика и тактика на амбулаторном этапе
Различные виды недержания мочи, диагностика и тактика на амбулаторном этапе Здоров'я – головне багатсво людини
Здоров'я – головне багатсво людини Холтер мониторирование
Холтер мониторирование Жалпы фармакология. Дәрілік заттардың фармакокинетикасы мен фармакодинамикасы
Жалпы фармакология. Дәрілік заттардың фармакокинетикасы мен фармакодинамикасы Невроздық синдром
Невроздық синдром Хирургическое лечение осложнений язвенной болезни
Хирургическое лечение осложнений язвенной болезни Острый аппендицит
Острый аппендицит Хроническая сердечная недостаточность
Хроническая сердечная недостаточность Новый порядок оказания платных медицинских услуг: как подготовиться к 1 сентября 2023 года
Новый порядок оказания платных медицинских услуг: как подготовиться к 1 сентября 2023 года Чума. История вопроса
Чума. История вопроса Беременность и почки. Анатомо-функциональные изменения почек и мочевых путей у беременных
Беременность и почки. Анатомо-функциональные изменения почек и мочевых путей у беременных Симптоматология острых пневмоний, очаговая и крупозная
Симптоматология острых пневмоний, очаговая и крупозная Аллергия. Противоаллергические средства
Аллергия. Противоаллергические средства Гипо және гипергликемиялық кома. Қант диабетінің клиникалық ағымы, ерекшелігі
Гипо және гипергликемиялық кома. Қант диабетінің клиникалық ағымы, ерекшелігі Здоровье. Здоровый образ жизни
Здоровье. Здоровый образ жизни Лекарственные средства, влияющие на функцию органов дыхания
Лекарственные средства, влияющие на функцию органов дыхания Перша допомога при переломах та вивихах
Перша допомога при переломах та вивихах Физические основы МРТ-диагностики
Физические основы МРТ-диагностики Сибирская язва
Сибирская язва