- Алгоритмические структуры и элементарные действия

Содержание
- 2. Цели урока Научиться реализовывать алгоритмы для элементарных действий мобильного робота Познакомиться с базовыми алгоритмическими структурами
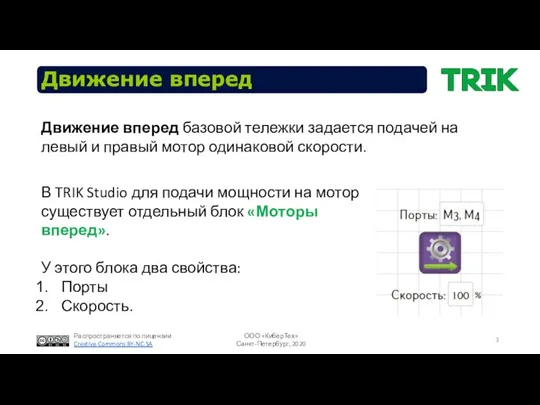
- 3. Движение вперед Движение вперед базовой тележки задается подачей на левый и правый мотор одинаковой скорости. В
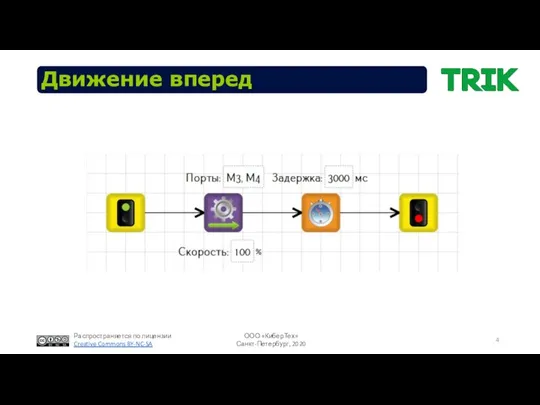
- 4. Движение вперед
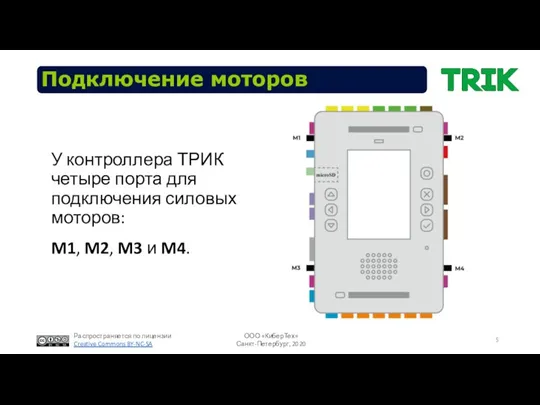
- 5. Подключение моторов У контроллера ТРИК четыре порта для подключения силовых моторов: M1, M2, M3 и M4.
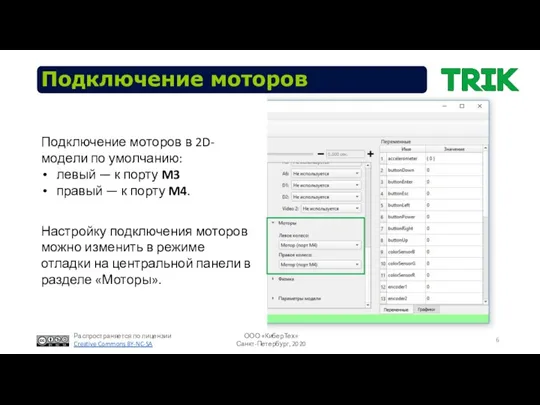
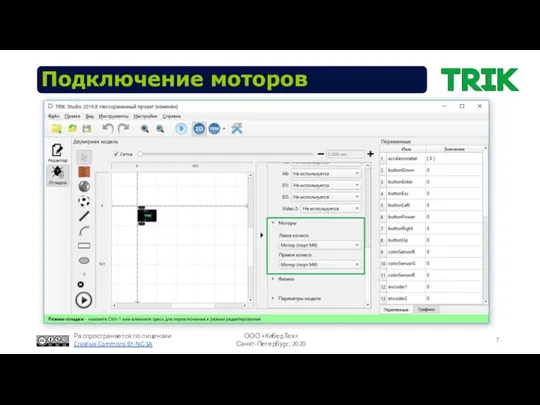
- 6. Подключение моторов Подключение моторов в 2D-модели по умолчанию: левый — к порту M3 правый — к
- 7. Подключение моторов
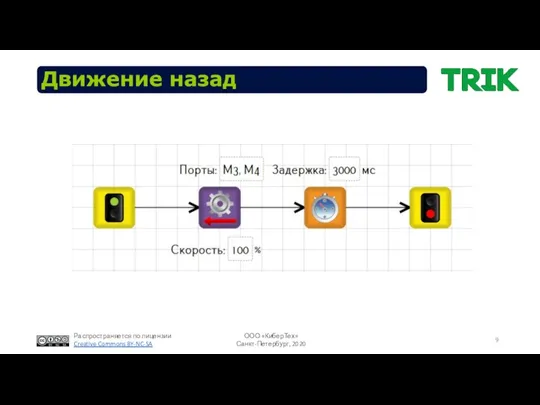
- 8. Движение назад Движение назад выполняется аналогично. Используем блок «Моторы назад».
- 9. Движение назад
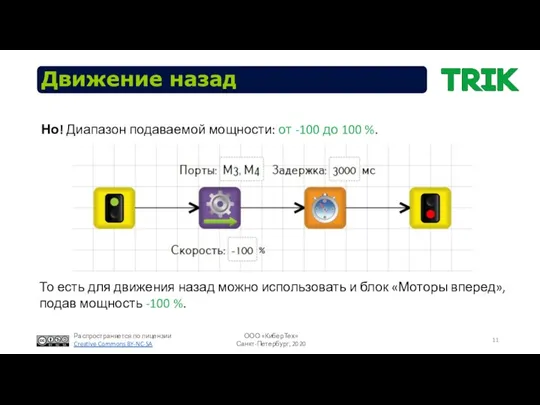
- 10. Движение назад Но! Диапазон подаваемой мощности: от -100 до 100 %. То есть для движения назад
- 11. Движение назад Но! Диапазон подаваемой мощности: от -100 до 100 %. То есть для движения назад
- 12. Повороты Повороты можно разделить на 3 типа: резкий поворот мощность подается только на одно колесо плавный
- 13. Модели алгоритмов Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это «плохой» подход, так как
- 14. Точные перемещения Поставьте галочку «Сетка». Теперь вы можете отслеживать точные перемещения модели. 1 клетка = 17,5
- 15. Переменные Переменная — поименованная область памяти. В TRIK Studio можно ввести свои переменные, используя блоки: «Инициализация
- 16. Нецелые числа пишутся через точку. Например: 1.75 Для перехода на новую строку используйте «Shift» + «Enter»
- 17. Задача 2.1.1 Робот находится в синей зоне старта. Робот должен проехать вперед, развернуться на 180°между зонами
- 18. Задача 2.1.2. Обогнуть угол. Робот должен проехать вперед со скоростью 60, повернуть на 90°, проехать вперед
- 19. Точные перемещения. Задача Задача 2.1.3. Проехать вперед ровно на 1 метр и 5 сантиметров. Использовать энкодерную
- 20. Решение. Для решения этой задачи необходимо вспомнить элементарные формулы из курса школьной математики: расчет длины окружности
- 21. Точные перемещения. Решение
- 22. Точные перемещения. Задача Для решения вам понадобится дополнительный параметр: b = 17.5 см (ширина колеи робота)
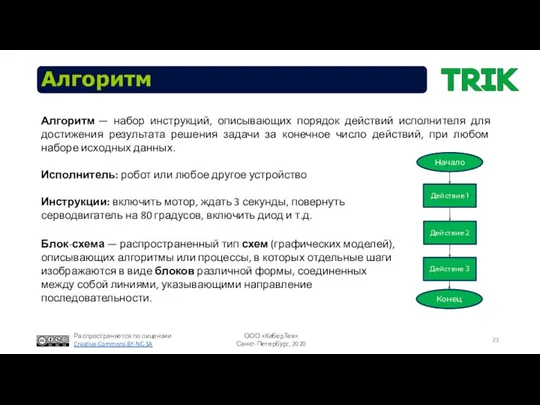
- 23. Алгоритм Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения задачи за конечное
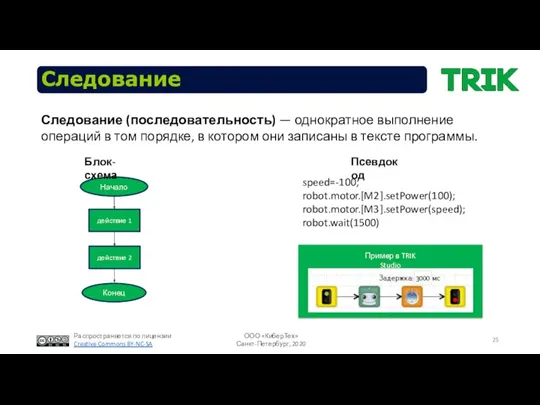
- 24. Алгоритмические структуры Следование (последовательность) — однократное выполнение операций в том порядке, в котором они записаны в
- 25. Следование (последовательность) — однократное выполнение операций в том порядке, в котором они записаны в тексте программы.
- 26. Задача 2.1.5. (самостоятельно) Написать алгоритм движения модели «змейкой». Использовать энкодерную модель. Следование. Задача
- 27. Ветвление Выполнение программы идет по одной из двух, нескольких или множества ветвей. Выбор ветви зависит от
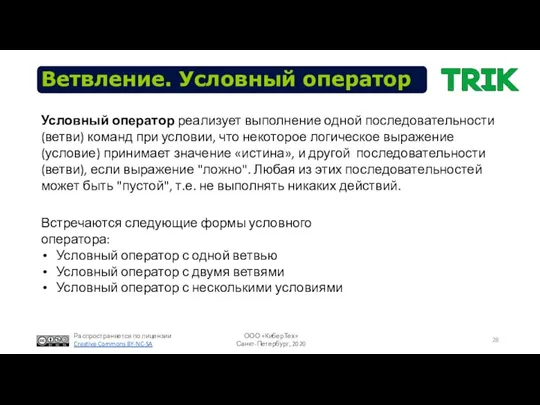
- 28. Ветвление. Условный оператор Встречаются следующие формы условного оператора: Условный оператор с одной ветвью Условный оператор с
- 29. Условный оператор с 1 ветвью Пример в TRIK Studio if (encoder.[E2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Псевдокод Блок-схема Условие
- 30. Условный оператор с 2 ветвями if (encoder.[E2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000); Пример в TRIK Studio Условие
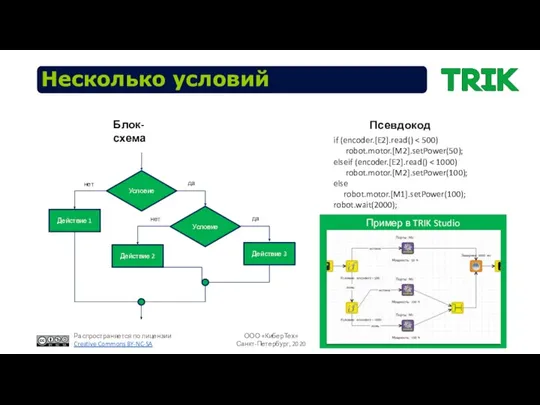
- 31. Несколько условий Условие Действие 1 нет да Блок-схема Псевдокод Условие Действие 2 да Действие 3 нет
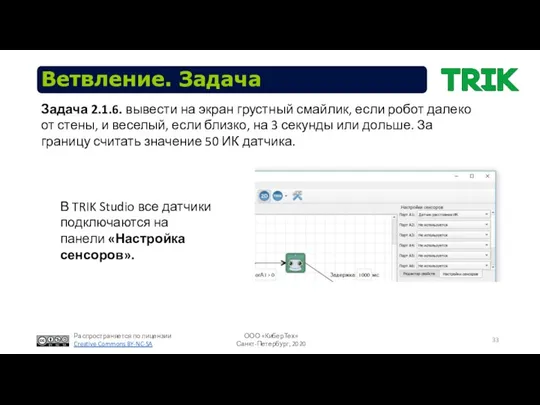
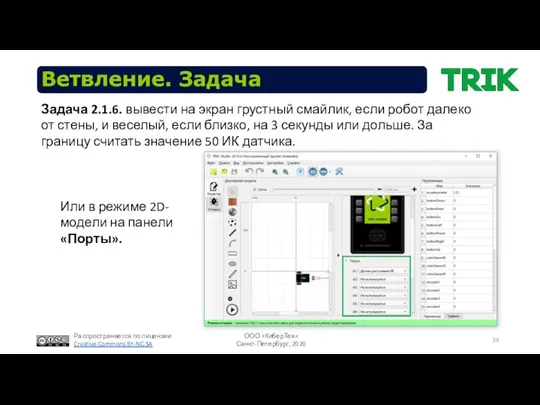
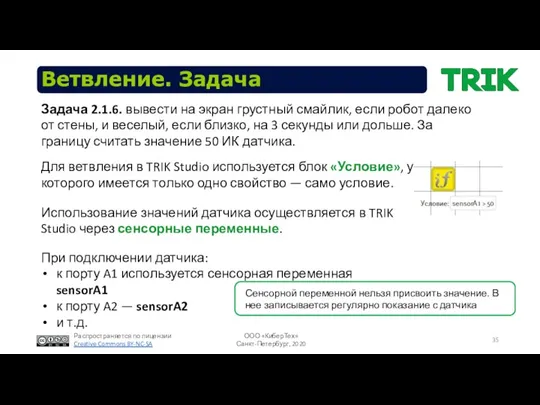
- 32. Ветвление. Задача Задача 2.1.6. вывести на экран грустный смайлик, если робот далеко от стены, и веселый,
- 33. Ветвление. Задача В TRIK Studio все датчики подключаются на панели «Настройка сенсоров». Задача 2.1.6. вывести на
- 34. Ветвление. Задача Или в режиме 2D-модели на панели «Порты». Задача 2.1.6. вывести на экран грустный смайлик,
- 35. Ветвление. Задача Для ветвления в TRIK Studio используется блок «Условие», у которого имеется только одно свойство
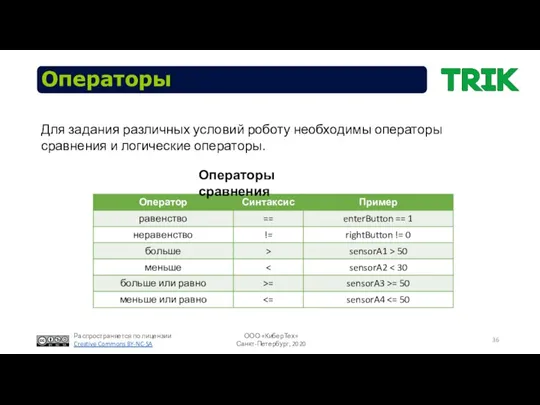
- 36. Операторы Операторы сравнения Для задания различных условий роботу необходимы операторы сравнения и логические операторы.
- 37. Операторы Для задания различных условий роботу необходимы операторы сравнения и логические операторы. Логические операторы
- 38. Ветвление. Задача Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния. Рабочий диапазон: 10–80 см. sensorA1>50
- 39. Ветвление. Задача Псевдокод if (robot.sensor.[A1].read() > 50) robot.sadSmile(); else robot.smile(); robot.wait(3000); Решение в TRIK Studio На
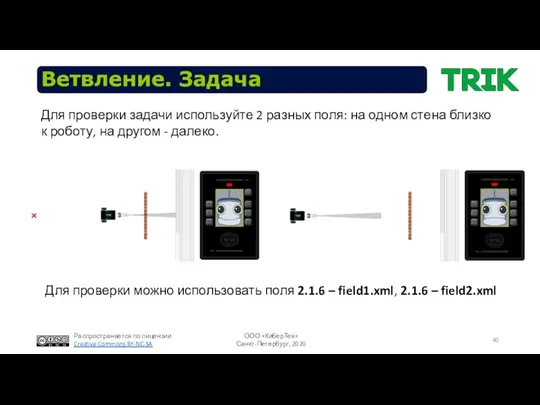
- 40. Ветвление. Задача Для проверки задачи используйте 2 разных поля: на одном стена близко к роботу, на
- 41. Ветвление. Задача Задача 2.1.7 (самостоятельно) Вывести на экран: Веселый смайлик, если ИК датчик выдает до 40.
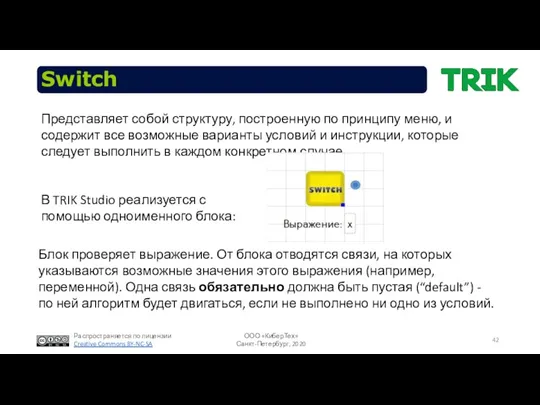
- 42. Switch Представляет собой структуру, построенную по принципу меню, и содержит все возможные варианты условий и инструкции,
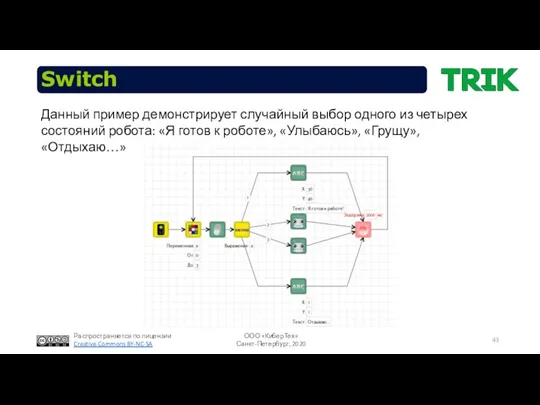
- 43. Switch Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я готов к роботе», «Улыбаюсь»,
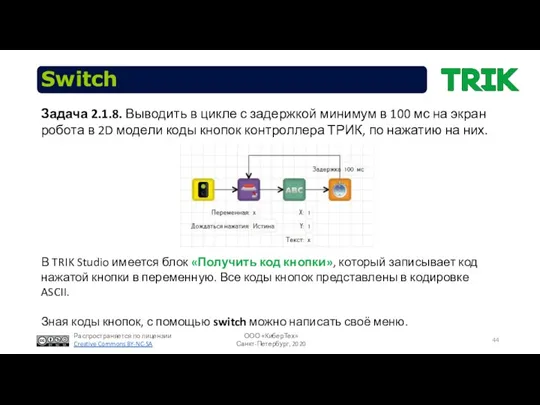
- 44. Switch В TRIK Studio имеется блок «Получить код кнопки», который записывает код нажатой кнопки в переменную.
- 45. Switch Выполнять в цикле действия по нажатию клавиш: «вверх» (103) — крутить моторами вперед «вниз» (108)
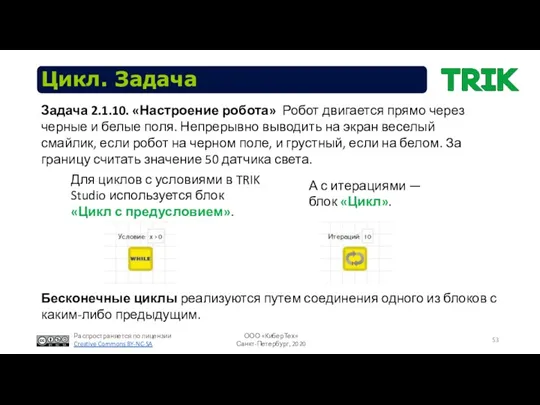
- 46. Цикл Существует 4 основных вида циклов: Безусловные циклы Цикл с предусловием Цикл с постусловием Цикл со
- 47. Цикл безусловный while true do robot.motor.[M2].setPower(100); Пример в TRIK Studio В этом случае у программы может
- 48. Цикл с предусловием Блок-схема Псевдокод Условие Начало действие 1 нет да действие 2 Конец while encoder.[E2].read()
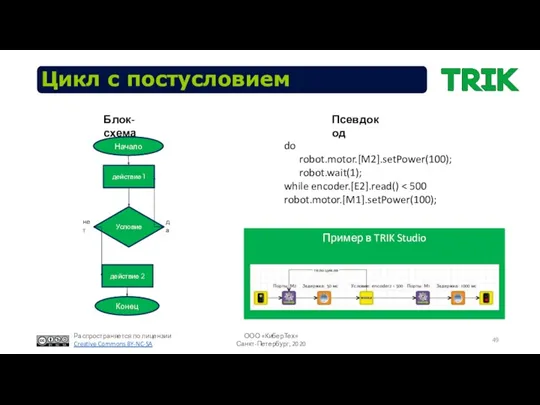
- 49. Цикл с постусловием Пример в TRIK Studio Условие действие 1 нет да действие 2 Конец do
- 50. Цикл с итерациями итерация Пример в TRIK Studio robot.motor.[M3].setPower(100); for (i = 0; i robot.wait(1); robot.motor.[M4].setPower(100);
- 51. Цикл. Задача Задача 2.1.10. «Настроение робота» Робот двигается прямо через черные и белые поля. Непрерывно выводить
- 52. Цикл. Задача Задача 2.1.10. «Настроение робота» Робот двигается прямо через черные и белые поля. Непрерывно выводить
- 53. Цикл. Задача Бесконечные циклы реализуются путем соединения одного из блоков с каким-либо предыдущим. Для циклов с
- 54. Цикл. Задача Псевдокод robot.motor.[M3].setPower(100); robot.motor.[M4].setPower(100); while true do if (robot.sensor.[A1].read() > 50) robot.smile(); else robot.sadSmile(); robot.wait(30);
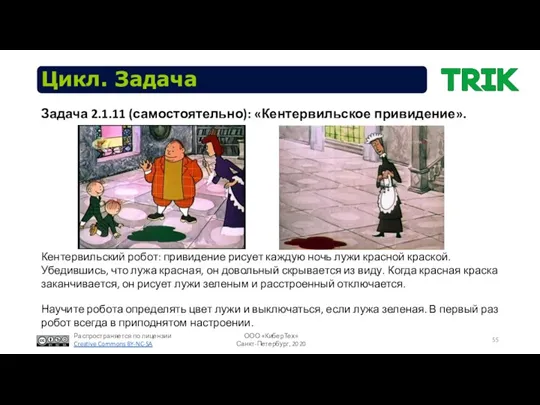
- 55. Цикл. Задача Задача 2.1.11 (самостоятельно): «Кентервильское привидение». Кентервильский робот: привидение рисует каждую ночь лужи красной краской.
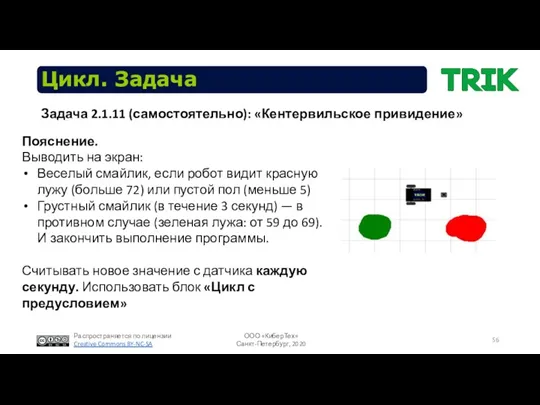
- 56. Цикл. Задача Пояснение. Выводить на экран: Веселый смайлик, если робот видит красную лужу (больше 72) или
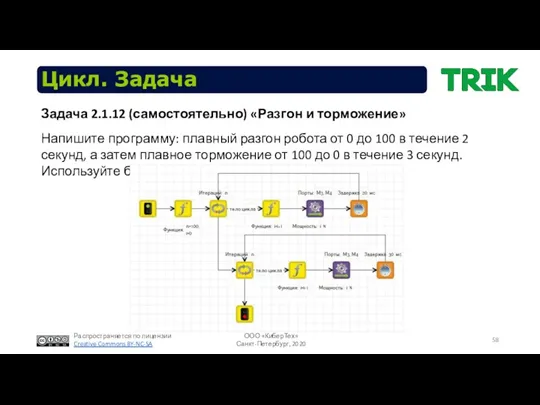
- 57. Цикл. Задача Напишите программу: плавный разгон робота от 0 до 100 в течение 2 секунд, а
- 58. Цикл. Задача Напишите программу: плавный разгон робота от 0 до 100 в течение 2 секунд, а
- 60. Скачать презентацию
Цели урока
Научиться реализовывать алгоритмы для элементарных действий мобильного робота
Познакомиться с базовыми
Цели урока
Научиться реализовывать алгоритмы для элементарных действий мобильного робота
Познакомиться с базовыми
Движение вперед
Движение вперед базовой тележки задается подачей на левый и правый
Движение вперед
Движение вперед базовой тележки задается подачей на левый и правый
Движение вперед
Движение вперед
Подключение моторов
У контроллера ТРИК четыре порта для подключения силовых моторов:
M1, M2,
Подключение моторов
У контроллера ТРИК четыре порта для подключения силовых моторов: M1, M2,
Подключение моторов
Подключение моторов в 2D-модели по умолчанию:
левый — к порту M3
правый
Подключение моторов
Подключение моторов в 2D-модели по умолчанию:
левый — к порту M3
правый
Подключение моторов
Подключение моторов

Движение назад
Движение назад выполняется аналогично.
Используем блок «Моторы назад».
Движение назад
Движение назад выполняется аналогично.
Используем блок «Моторы назад».
Движение назад
Движение назад

Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
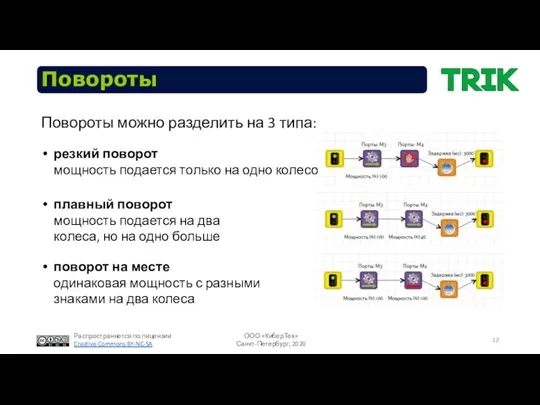
Повороты
Повороты можно разделить на 3 типа:
резкий поворот
мощность подается только на
Повороты
Повороты можно разделить на 3 типа:
резкий поворот мощность подается только на
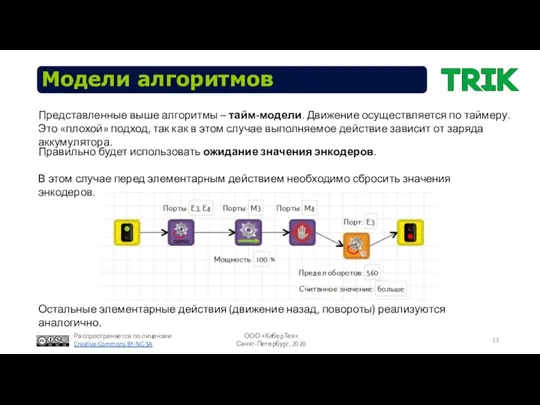
Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
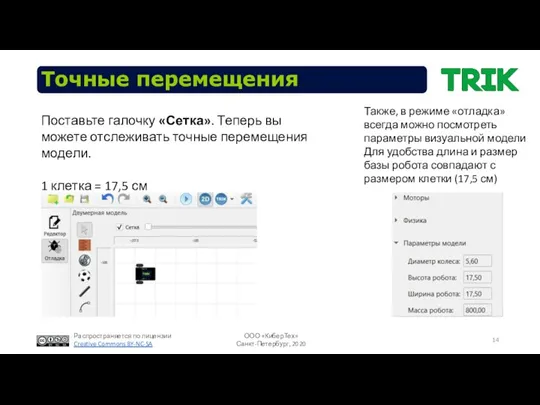
Точные перемещения
Поставьте галочку «Сетка». Теперь вы можете отслеживать точные перемещения модели.
Точные перемещения
Поставьте галочку «Сетка». Теперь вы можете отслеживать точные перемещения модели.
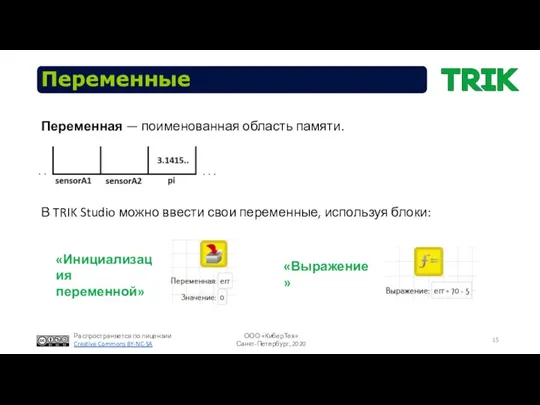
Переменные
Переменная — поименованная область памяти.
В TRIK Studio можно ввести свои переменные,
Переменные
Переменная — поименованная область памяти.
В TRIK Studio можно ввести свои переменные,
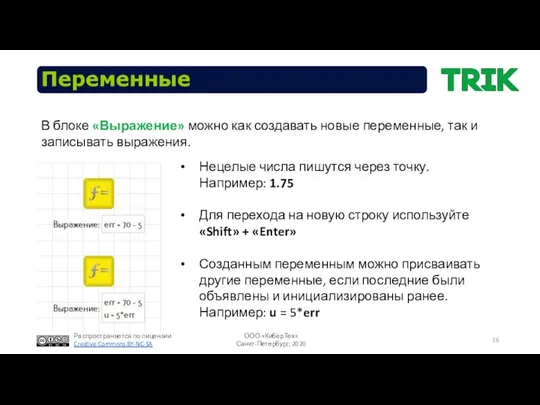
Нецелые числа пишутся через точку.
Например: 1.75
Для перехода на новую строку
Нецелые числа пишутся через точку.
Например: 1.75
Для перехода на новую строку
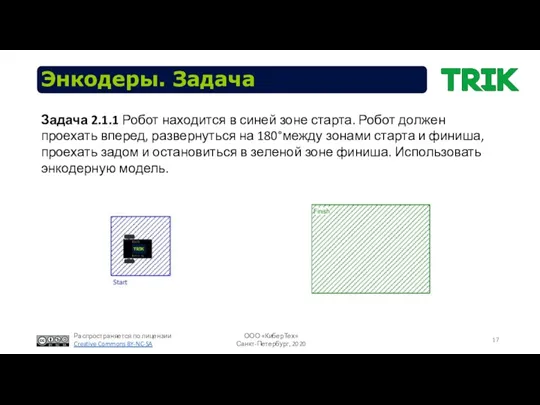
Задача 2.1.1 Робот находится в синей зоне старта. Робот должен проехать
Задача 2.1.1 Робот находится в синей зоне старта. Робот должен проехать
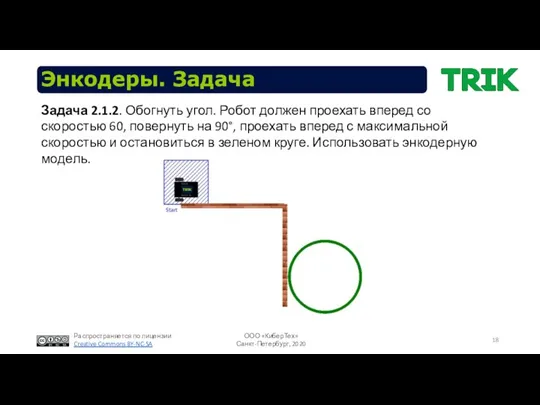
Задача 2.1.2. Обогнуть угол. Робот должен проехать вперед со скоростью 60,
Задача 2.1.2. Обогнуть угол. Робот должен проехать вперед со скоростью 60,

Точные перемещения. Задача
Задача 2.1.3. Проехать вперед ровно на 1 метр и
Точные перемещения. Задача
Задача 2.1.3. Проехать вперед ровно на 1 метр и

Решение.
Для решения этой задачи необходимо вспомнить элементарные формулы из курса школьной
Решение. Для решения этой задачи необходимо вспомнить элементарные формулы из курса школьной

Точные перемещения. Решение
Точные перемещения. Решение
Точные перемещения. Задача
Для решения вам понадобится дополнительный параметр:
b = 17.5 см
Точные перемещения. Задача
Для решения вам понадобится дополнительный параметр:
b = 17.5 см
Алгоритм
Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения
Алгоритм
Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения

Алгоритмические структуры
Следование (последовательность) — однократное выполнение операций в том порядке, в
Алгоритмические структуры
Следование (последовательность) — однократное выполнение операций в том порядке, в
Следование (последовательность) — однократное выполнение операций в том порядке, в котором
Следование (последовательность) — однократное выполнение операций в том порядке, в котором

Задача 2.1.5. (самостоятельно) Написать алгоритм движения модели «змейкой». Использовать энкодерную модель.
Следование.
Задача 2.1.5. (самостоятельно) Написать алгоритм движения модели «змейкой». Использовать энкодерную модель.
Следование.

Ветвление
Выполнение программы идет по одной из двух, нескольких или множества ветвей.
Ветвление
Выполнение программы идет по одной из двух, нескольких или множества ветвей.
Ветвление. Условный оператор
Встречаются следующие формы условного оператора:
Условный оператор с одной ветвью
Условный
Ветвление. Условный оператор
Встречаются следующие формы условного оператора:
Условный оператор с одной ветвью
Условный

Условный оператор с 1 ветвью
Пример в TRIK Studio
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Псевдокод
Блок-схема
Условие
действие
Условный оператор с 1 ветвью
Пример в TRIK Studio
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Псевдокод
Блок-схема
Условие
действие
![Условный оператор с 2 ветвями if (encoder.[E2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100);](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/242279/slide-29.jpg)
Условный оператор с 2 ветвями
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Пример в
Условный оператор с 2 ветвями
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Пример в
Несколько условий
Условие
Действие 1
нет
да
Блок-схема
Псевдокод
Условие
Действие 2
да
Действие 3
нет
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(50);
elseif (encoder.[E2].read() <
Несколько условий
Условие
Действие 1
нет
да
Блок-схема
Псевдокод
Условие
Действие 2
да
Действие 3
нет
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(50);
elseif (encoder.[E2].read() <

Ветвление. Задача
Задача 2.1.6. вывести на экран грустный смайлик, если робот далеко
Ветвление. Задача
Задача 2.1.6. вывести на экран грустный смайлик, если робот далеко
Ветвление. Задача
В TRIK Studio все датчики подключаются на панели «Настройка сенсоров».
Задача
Ветвление. Задача
В TRIK Studio все датчики подключаются на панели «Настройка сенсоров».
Задача
Ветвление. Задача
Или в режиме 2D-модели на панели «Порты».
Задача 2.1.6. вывести на
Ветвление. Задача
Или в режиме 2D-модели на панели «Порты».
Задача 2.1.6. вывести на
Ветвление. Задача
Для ветвления в TRIK Studio используется блок «Условие», у которого
Ветвление. Задача
Для ветвления в TRIK Studio используется блок «Условие», у которого
Операторы
Операторы сравнения
Для задания различных условий роботу необходимы операторы сравнения и логические
Операторы
Операторы сравнения
Для задания различных условий роботу необходимы операторы сравнения и логические
Операторы
Для задания различных условий роботу необходимы операторы сравнения и логические операторы.
Логические
Операторы
Для задания различных условий роботу необходимы операторы сравнения и логические операторы.
Логические

Ветвление. Задача
Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния.
Рабочий диапазон:
Ветвление. Задача
Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния.
Рабочий диапазон:
![Ветвление. Задача Псевдокод if (robot.sensor.[A1].read() > 50) robot.sadSmile(); else robot.smile();](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/242279/slide-38.jpg)
Ветвление. Задача
Псевдокод
if (robot.sensor.[A1].read() > 50)
robot.sadSmile();
else
robot.smile();
robot.wait(3000);
Решение в TRIK Studio
На
Ветвление. Задача
Псевдокод
if (robot.sensor.[A1].read() > 50)
robot.sadSmile();
else
robot.smile();
robot.wait(3000);
Решение в TRIK Studio
На
Ветвление. Задача
Для проверки задачи используйте 2 разных поля: на одном стена
Ветвление. Задача
Для проверки задачи используйте 2 разных поля: на одном стена

Ветвление. Задача
Задача 2.1.7 (самостоятельно) Вывести на экран:
Веселый смайлик, если ИК
Ветвление. Задача
Задача 2.1.7 (самостоятельно) Вывести на экран:
Веселый смайлик, если ИК
Switch
Представляет собой структуру, построенную по принципу меню, и содержит все возможные
Switch
Представляет собой структуру, построенную по принципу меню, и содержит все возможные
Switch
Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я
Switch
Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я
Switch
В TRIK Studio имеется блок «Получить код кнопки», который записывает код
Switch
В TRIK Studio имеется блок «Получить код кнопки», который записывает код
Switch
Выполнять в цикле действия по нажатию клавиш:
«вверх» (103) — крутить моторами
Switch
Выполнять в цикле действия по нажатию клавиш: «вверх» (103) — крутить моторами
Цикл
Существует 4 основных вида циклов:
Безусловные циклы
Цикл с предусловием
Цикл с постусловием
Цикл со
Цикл
Существует 4 основных вида циклов:
Безусловные циклы
Цикл с предусловием
Цикл с постусловием
Цикл со
![Цикл безусловный while true do robot.motor.[M2].setPower(100); Пример в TRIK Studio](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/242279/slide-46.jpg)
Цикл безусловный
while true do
robot.motor.[M2].setPower(100);
Пример в TRIK Studio
В этом случае у
Цикл безусловный
while true do
robot.motor.[M2].setPower(100);
Пример в TRIK Studio
В этом случае у

Цикл с предусловием
Блок-схема
Псевдокод
Условие
Начало
действие 1
нет
да
действие 2
Конец
while encoder.[E2].read() < 500 do
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Пример в
Цикл с предусловием
Блок-схема
Псевдокод
Условие
Начало
действие 1
нет
да
действие 2
Конец
while encoder.[E2].read() < 500 do
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Пример в
Цикл с постусловием
Пример в TRIK Studio
Условие
действие 1
нет
да
действие 2
Конец
do
robot.motor.[M2].setPower(100);
robot.wait(1);
while
Цикл с постусловием
Пример в TRIK Studio
Условие
действие 1
нет
да
действие 2
Конец
do
robot.motor.[M2].setPower(100);
robot.wait(1);
while
![Цикл с итерациями итерация Пример в TRIK Studio robot.motor.[M3].setPower(100); for](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/242279/slide-49.jpg)
Цикл с итерациями
итерация
Пример в TRIK Studio
robot.motor.[M3].setPower(100);
for (i = 0; i <
Цикл с итерациями
итерация
Пример в TRIK Studio
robot.motor.[M3].setPower(100);
for (i = 0; i <

Цикл. Задача
Задача 2.1.10. «Настроение робота» Робот двигается прямо через черные и
Цикл. Задача
Задача 2.1.10. «Настроение робота» Робот двигается прямо через черные и
Цикл. Задача
Задача 2.1.10. «Настроение робота» Робот двигается прямо через черные и
Цикл. Задача
Задача 2.1.10. «Настроение робота» Робот двигается прямо через черные и
Цикл. Задача
Бесконечные циклы реализуются путем соединения одного из блоков с каким-либо
Цикл. Задача
Бесконечные циклы реализуются путем соединения одного из блоков с каким-либо
![Цикл. Задача Псевдокод robot.motor.[M3].setPower(100); robot.motor.[M4].setPower(100); while true do if (robot.sensor.[A1].read()](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/242279/slide-53.jpg)
Цикл. Задача
Псевдокод
robot.motor.[M3].setPower(100);
robot.motor.[M4].setPower(100);
while true do
if (robot.sensor.[A1].read() > 50)
robot.smile();
else
Цикл. Задача
Псевдокод
robot.motor.[M3].setPower(100);
robot.motor.[M4].setPower(100);
while true do
if (robot.sensor.[A1].read() > 50)
robot.smile();
else
Цикл. Задача
Задача 2.1.11 (самостоятельно): «Кентервильское привидение».
Кентервильский робот: привидение рисует каждую ночь
Цикл. Задача
Задача 2.1.11 (самостоятельно): «Кентервильское привидение».
Кентервильский робот: привидение рисует каждую ночь
Цикл. Задача
Пояснение.
Выводить на экран:
Веселый смайлик, если робот видит красную
Цикл. Задача
Пояснение.
Выводить на экран:
Веселый смайлик, если робот видит красную
Цикл. Задача
Напишите программу: плавный разгон робота от 0 до 100 в
Цикл. Задача
Напишите программу: плавный разгон робота от 0 до 100 в
Цикл. Задача
Напишите программу: плавный разгон робота от 0 до 100 в
Цикл. Задача
Напишите программу: плавный разгон робота от 0 до 100 в
 Проблемы качества жизни в паллиативной медицине
Проблемы качества жизни в паллиативной медицине История написания романа Петр I
История написания романа Петр I Теория эволюции Дарвина
Теория эволюции Дарвина Правописание религиозной лексики
Правописание религиозной лексики Презентация к уроку основ православной культуры Высокий иконостас.
Презентация к уроку основ православной культуры Высокий иконостас. Достопримечательности Германии
Достопримечательности Германии Путёвка в жизнь
Путёвка в жизнь Политическая система Китайской Народной Республики
Политическая система Китайской Народной Республики традиции Радуга Бобова-михеева Диск
традиции Радуга Бобова-михеева Диск Воспитание и школа в эпоху средневековья
Воспитание и школа в эпоху средневековья Художественная культура мусульманского Востока
Художественная культура мусульманского Востока презентация по теме Черный, белый и золотой пояс Челябинского Урала
презентация по теме Черный, белый и золотой пояс Челябинского Урала Дорога в небо
Дорога в небо Материалы художника и химия
Материалы художника и химия Спинной мозг
Спинной мозг Международная защита прав человека
Международная защита прав человека Числовая последовательность
Числовая последовательность Индийские касты
Индийские касты Инженерные профессии
Инженерные профессии Виртуальная зависимость
Виртуальная зависимость Поняття про свердловину
Поняття про свердловину Выдающаяся личность Байкен Ашимов Ашимович
Выдающаяся личность Байкен Ашимов Ашимович Налоги как источник дохода государства
Налоги как источник дохода государства Презентация к уроку по теме Редукторы для газовой сварки
Презентация к уроку по теме Редукторы для газовой сварки Игра - путешествие Добро пожаловать в театр
Игра - путешествие Добро пожаловать в театр Моя малая родина - город Зеленогорск
Моя малая родина - город Зеленогорск Города России. Владивосток
Города России. Владивосток Сила пара
Сила пара