- Автомат Мура

Содержание
- 2. Автомат Мура (абстрактный автомат второго рода) в теории вычислений — конечный автомат, выходное значение сигнала в
- 3. Формальное определение
- 4. Для любого автомата Мура существует эквивалентный ему автомат Мили и наоборот. Любой автомат Мура путём добавления
- 5. Способы задания Диаграмма — изображённый на плоскости ориентированный граф, вершины которого взаимно однозначно соответствуют состояниям автомата,
- 7. Скачать презентацию
Автомат Мура (абстрактный автомат второго рода) в теории вычислений — конечный автомат, выходное значение сигнала в
Автомат Мура (абстрактный автомат второго рода) в теории вычислений — конечный автомат, выходное значение сигнала в
Формальное определение
Формальное определение
Для любого автомата Мура существует эквивалентный ему автомат Мили и наоборот.
Для любого автомата Мура существует эквивалентный ему автомат Мили и наоборот.
Способы задания
Диаграмма — изображённый на плоскости ориентированный граф, вершины которого взаимно однозначно соответствуют
Способы задания
Диаграмма — изображённый на плоскости ориентированный граф, вершины которого взаимно однозначно соответствуют
 Культура и духовная жизнь общества
Культура и духовная жизнь общества Ассамлеи и гулянья в эпоху Петра
Ассамлеи и гулянья в эпоху Петра Работа в microsoft powerpoint 2007
Работа в microsoft powerpoint 2007 Personality disorders and behavior-related diseases, damage and dysfunction of the brain
Personality disorders and behavior-related diseases, damage and dysfunction of the brain Экономическая политика Петра I
Экономическая политика Петра I Экологическая политика Японии в годы кризиса
Экологическая политика Японии в годы кризиса Архитектура компьютера. Виды памяти
Архитектура компьютера. Виды памяти Строительство общеобразовательной школы на территории округа Город Калининград в Восточном жилом районе
Строительство общеобразовательной школы на территории округа Город Калининград в Восточном жилом районе Adaptive type of population. Features of biological and social adaptation of arctic indigenous people
Adaptive type of population. Features of biological and social adaptation of arctic indigenous people Брейн-ринг воспитанников православных школ Красноярской Епархии по учебному предмету Основы православной культуры
Брейн-ринг воспитанников православных школ Красноярской Епархии по учебному предмету Основы православной культуры Сестринский процесс при бронхоэктатической болезни (бронхоэктазах)
Сестринский процесс при бронхоэктатической болезни (бронхоэктазах) Функции Постоянного комитета СФС по соблюдению международных стандартов
Функции Постоянного комитета СФС по соблюдению международных стандартов Условные линии на карте
Условные линии на карте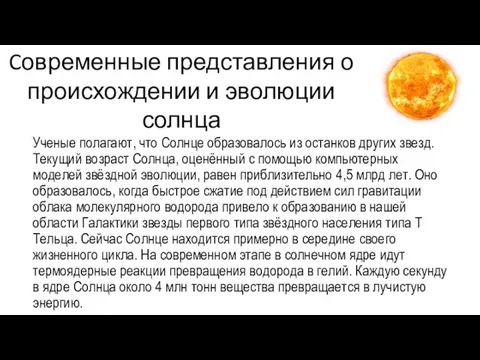 Современные представления о происхождении и эволюции Солнца
Современные представления о происхождении и эволюции Солнца Структура Web-страницы. Форматирование текста на Web-странице
Структура Web-страницы. Форматирование текста на Web-странице Сочинский государственный университет. Факультет туризма и сервиса
Сочинский государственный университет. Факультет туризма и сервиса Толерантность
Толерантность Сибирская язва
Сибирская язва Сопротивление в цепи переменного тока
Сопротивление в цепи переменного тока Умножение дробей. 6 класс
Умножение дробей. 6 класс Цветные сплавы
Цветные сплавы зеленая экономика 17
зеленая экономика 17 Показательные уравнения и неравенства
Показательные уравнения и неравенства Склады и складские операции
Склады и складские операции Федеративна Республіка Німеччина
Федеративна Республіка Німеччина Д.И. Менделеев
Д.И. Менделеев Перечень тем рефератов. Корпоративные финансы
Перечень тем рефератов. Корпоративные финансы Затраты и их классификация. Учет и анализ: управленческий учет
Затраты и их классификация. Учет и анализ: управленческий учет