- Автоматическая стабилизация и управление углом тангажа летательного аппарата

Содержание
- 2. Автопилот угла тангажа (АП) - средство автоматического управления, обеспечивающее стабилизацию и управление продольным короткопериодическим движением самолета
- 3. Состав автопилота: Датчики определения текущих и заданных параметров ЛА; Вычислитель , формирующий управляющий сигнал; Сервопривод, отрабатывающий
- 4. Порядок включения автопилота в механическую проводку управления рулем высоты: параллельную схему включения исполнительного устройства сервопривода в
- 5. Схема аналогового электромеханического автопилота угла тангажа с жесткой и скоростной обратными связями в сервоприводе Состав автопилота:
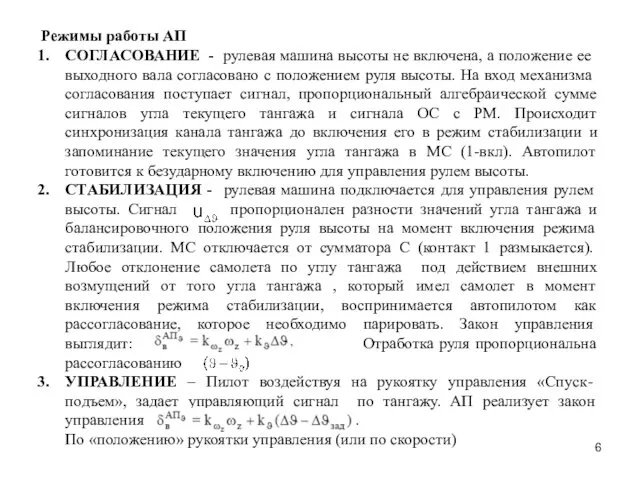
- 6. Режимы работы АП СОГЛАСОВАНИЕ - рулевая машина высоты не включена, а положение ее выходного вала согласовано
- 7. Функциональная схема аналогового электрогидравлического автопилота угла тангажа Состав автопилота входят те же датчики текущих и заданных
- 8. В процессе эксплуатации осуществляется Проверка работоспособности: Включение питания АП; Включение режимов АП; Включение сигнализации режимов АП;
- 9. 1.2.1 Процесс устранения начального значения угла тангажа . меняет знак 1.2. Управление продольным короткопериодическим движением
- 10. 1. Точность стабилизации угла тангажа 2. Перерегулирование тангажа 3. Время регулирования тангажа Показатели качества управления по
- 11. 1.2.2. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в сервоприводе внешнего ступенчатого моментного возмущения
- 12. 1.2.3. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в сервоприводе ступенчатого внешнего вертикального ветрового
- 13. 1.2.4. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в сервоприводе ступенчатого внешнего силового возмущения
- 14. 1.3. Способы обеспечения астатизма контура тангажа (лекция 2) Для обеспечения астатизма применяются три основных способа. Первый
- 15. 1.3.1. Автопилот тангажа с изодромной обратной связью в сервоприводе Изодромную обратную связь можно получить : пропусканием
- 16. 1. Если автопилот отклоняет руль высоты на угол , то сигнал изодромной обратной связи будет изменяться
- 17. 1.3.2. Автопилот тангажа с ПИД-управлением (пропорционально-интегрально-дифференциальное управление) Данный закон аналогичен рассмотренному процессу для автопилота угла тангажа
- 18. 1.3.3. Автопилот тангажа с дополнительным интегрирующим сервоприводом Интегрирующая составляющая закона управления получается путем пропускания сигнала через
- 19. 1.4. Особенности законов управления автопилотов угла тангажа.
- 20. Закон управления цифроаналогового автопилота в режиме стабилизации угла тангажа имеет вид
- 22. Скачать презентацию
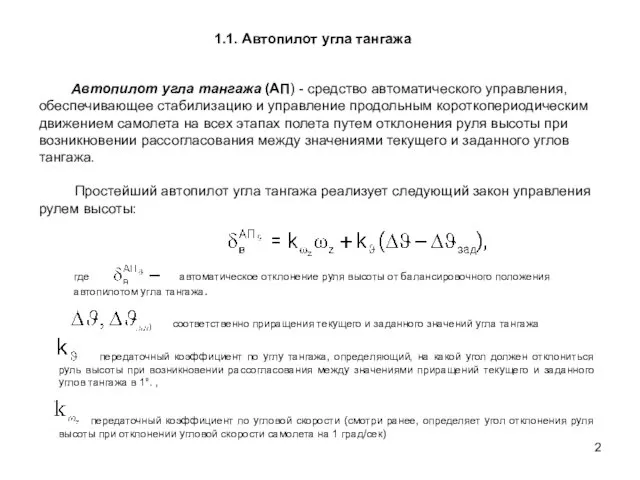
Автопилот угла тангажа (АП) - средство автоматического управления, обеспечивающее стабилизацию и
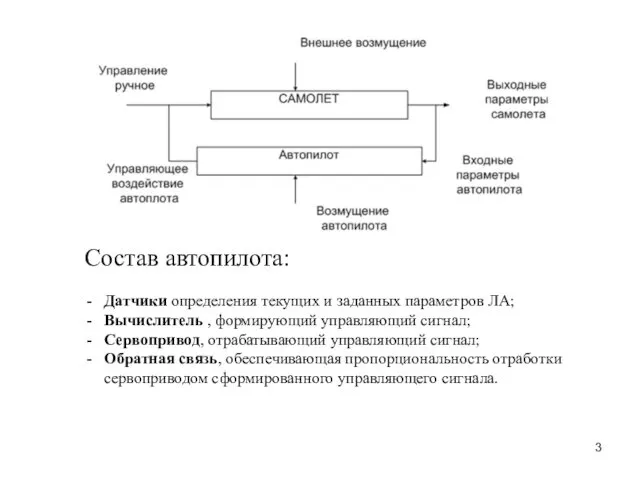
Состав автопилота:
Датчики определения текущих и заданных параметров ЛА;
Вычислитель , формирующий управляющий
Состав автопилота:
Датчики определения текущих и заданных параметров ЛА;
Вычислитель , формирующий управляющий
Порядок включения автопилота в механическую проводку управления рулем высоты:
параллельную схему
Порядок включения автопилота в механическую проводку управления рулем высоты:
параллельную схему
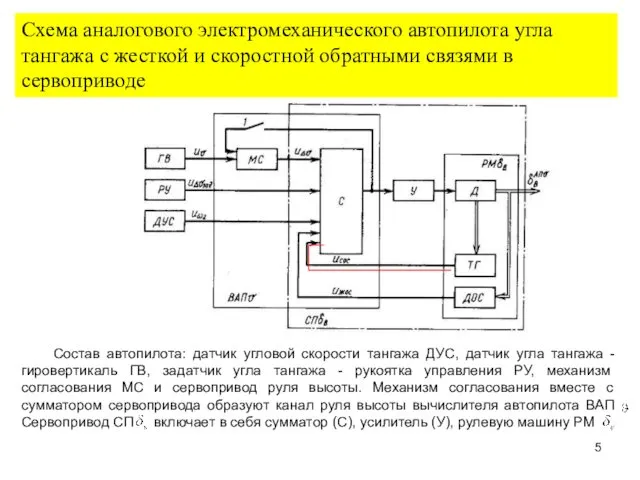
Схема аналогового электромеханического автопилота угла тангажа с жесткой и скоростной обратными
Схема аналогового электромеханического автопилота угла тангажа с жесткой и скоростной обратными
Режимы работы АП
СОГЛАСОВАНИЕ - рулевая машина высоты не включена, а положение
Режимы работы АП
СОГЛАСОВАНИЕ - рулевая машина высоты не включена, а положение

Функциональная схема аналогового электрогидравлического автопилота угла тангажа
Состав автопилота входят те же
Функциональная схема аналогового электрогидравлического автопилота угла тангажа
Состав автопилота входят те же
В процессе эксплуатации осуществляется
Проверка работоспособности:
Включение питания АП;
Включение режимов АП;
Включение
В процессе эксплуатации осуществляется
Проверка работоспособности:
Включение питания АП;
Включение режимов АП;
Включение
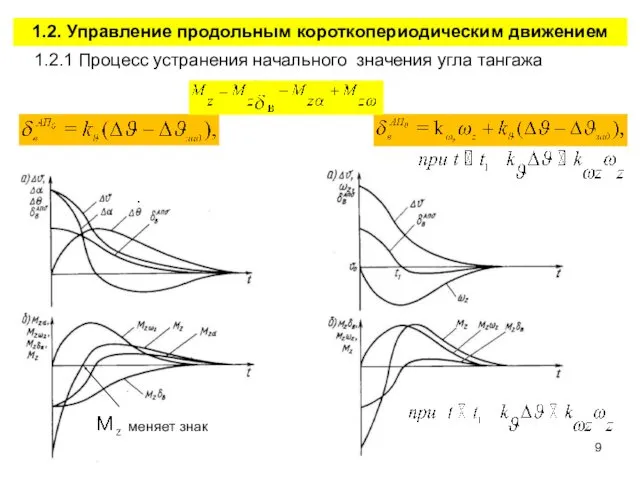
1.2.1 Процесс устранения начального значения угла тангажа
.
меняет знак
1.2. Управление
1.2.1 Процесс устранения начального значения угла тангажа
.
меняет знак
1.2. Управление
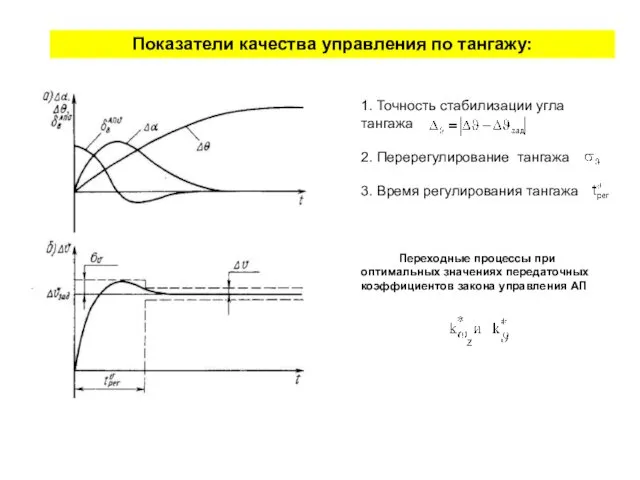
1. Точность стабилизации угла тангажа
2. Перерегулирование тангажа
3. Время регулирования тангажа
Показатели
2. Перерегулирование тангажа
3. Время регулирования тангажа
Показатели
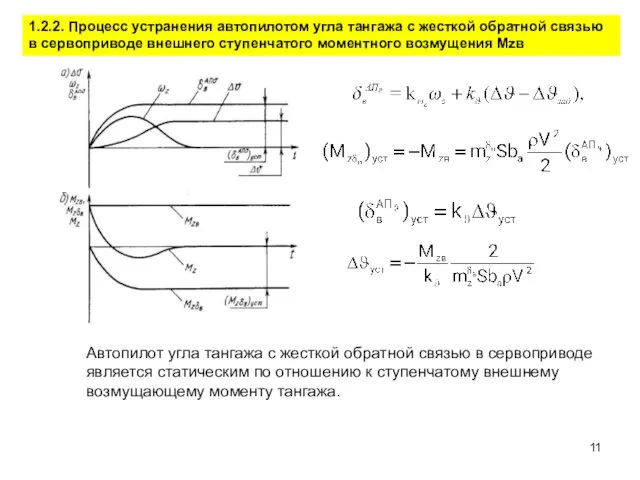
1.2.2. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
1.2.2. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
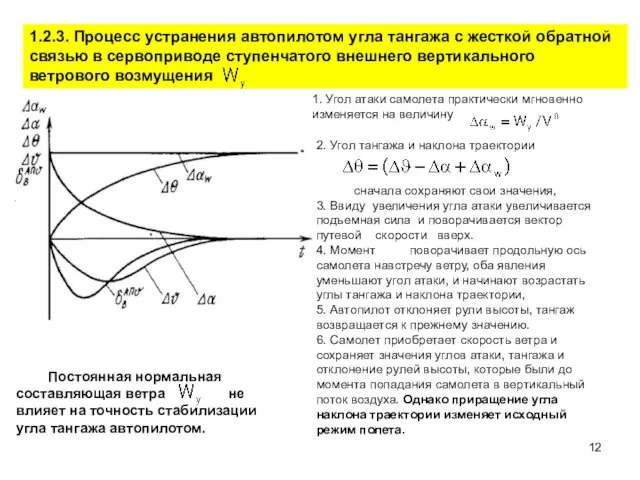
1.2.3. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
1.2.3. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
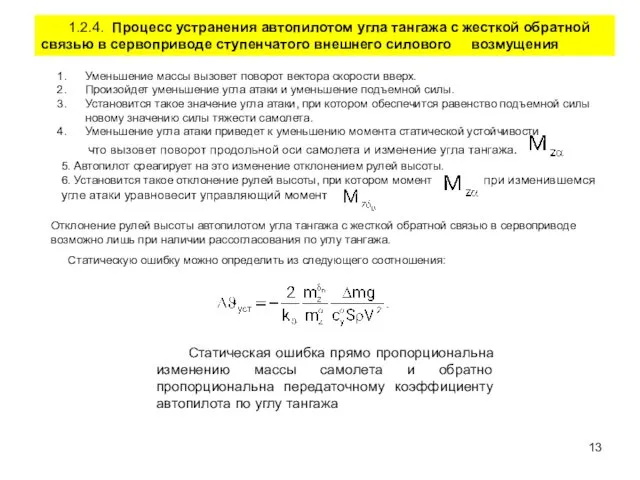
1.2.4. Процесс устранения автопилотом угла тангажа с жесткой обратной связью
1.2.4. Процесс устранения автопилотом угла тангажа с жесткой обратной связью
1.3. Способы обеспечения астатизма контура тангажа (лекция 2)
Для обеспечения астатизма применяются
1.3. Способы обеспечения астатизма контура тангажа (лекция 2)
Для обеспечения астатизма применяются
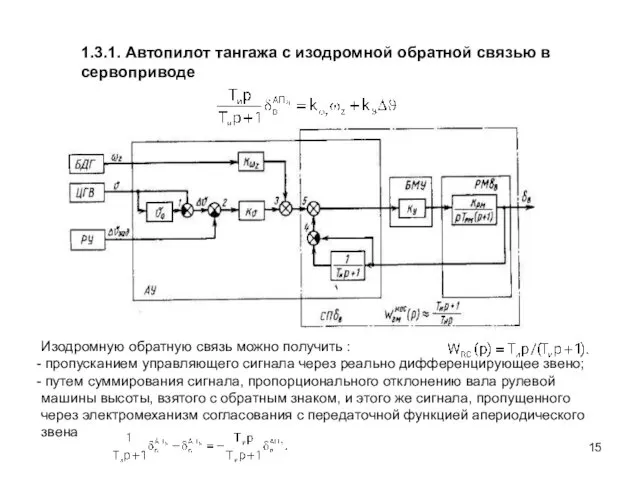
1.3.1. Автопилот тангажа с изодромной обратной связью в сервоприводе
Изодромную обратную связь
1.3.1. Автопилот тангажа с изодромной обратной связью в сервоприводе
Изодромную обратную связь
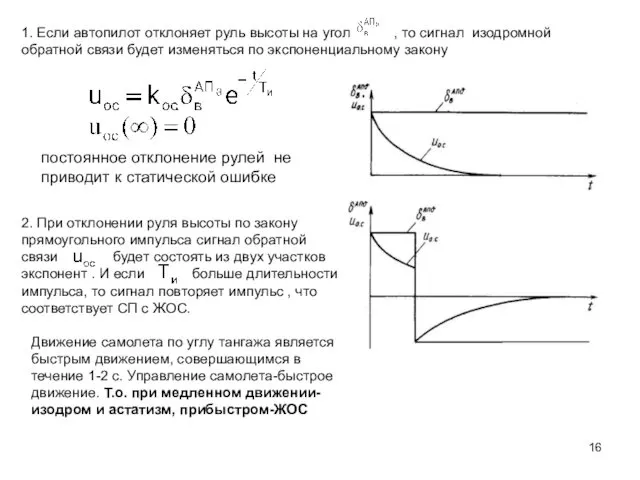
1. Если автопилот отклоняет руль высоты на угол , то сигнал
1. Если автопилот отклоняет руль высоты на угол , то сигнал
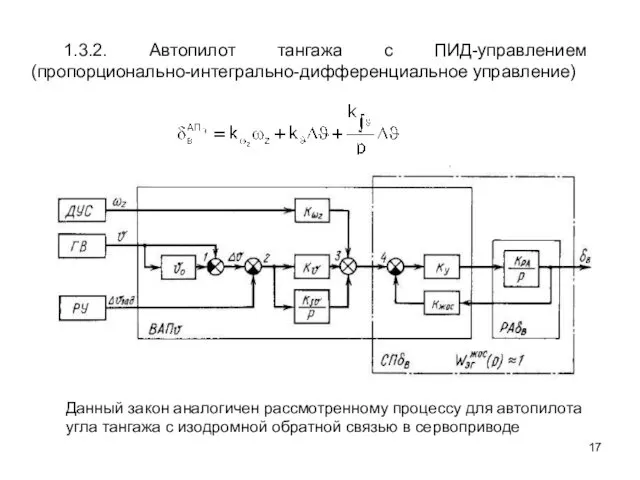
1.3.2. Автопилот тангажа с ПИД-управлением (пропорционально-интегрально-дифференциальное управление)
Данный закон аналогичен рассмотренному процессу
1.3.2. Автопилот тангажа с ПИД-управлением (пропорционально-интегрально-дифференциальное управление)
Данный закон аналогичен рассмотренному процессу

1.3.3. Автопилот тангажа с дополнительным интегрирующим сервоприводом
Интегрирующая составляющая закона управления получается
1.3.3. Автопилот тангажа с дополнительным интегрирующим сервоприводом
Интегрирующая составляющая закона управления получается
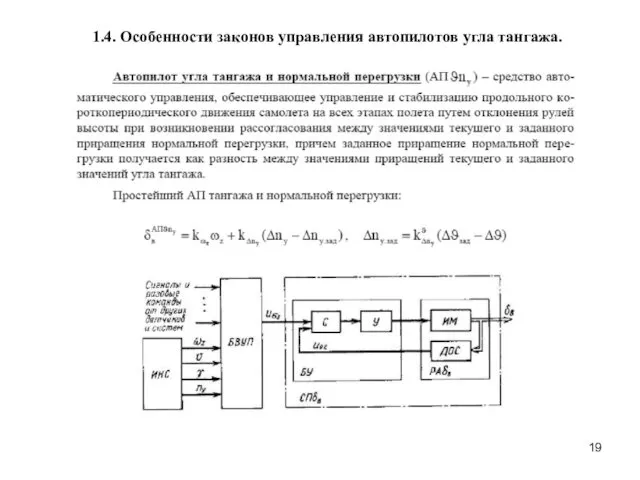
1.4. Особенности законов управления автопилотов угла тангажа.
1.4. Особенности законов управления автопилотов угла тангажа.

Закон управления цифроаналогового автопилота в режиме стабилизации угла тангажа имеет вид
Закон управления цифроаналогового автопилота в режиме стабилизации угла тангажа имеет вид
 Off activities
Off activities Информация, свойства, системы счисления, измерение и представление текстовой и графической информации
Информация, свойства, системы счисления, измерение и представление текстовой и графической информации Основні положення законодавства України щодо внутрішнього переміщення та захисту прав людини ВПО
Основні положення законодавства України щодо внутрішнього переміщення та захисту прав людини ВПО Основные элементы налога
Основные элементы налога Антиген
Антиген Изображение и обозначение резьбы
Изображение и обозначение резьбы Страны Западной и Центральной Африки. Нигерия
Страны Западной и Центральной Африки. Нигерия Развитие фонематического слуха у детей старшего дошкольного возраста
Развитие фонематического слуха у детей старшего дошкольного возраста Математика. Теория вероятностей
Математика. Теория вероятностей Наблюдения и опыты
Наблюдения и опыты Открытое собрание студенческого совета ХТФ для I курса
Открытое собрание студенческого совета ХТФ для I курса Современные строительные материалы
Современные строительные материалы Конфликты человеческой души: интрапсихическая интерпретация
Конфликты человеческой души: интрапсихическая интерпретация матем 15.02
матем 15.02 Цифровые многоканальные телекоммуникационные системы
Цифровые многоканальные телекоммуникационные системы Составление программ рисования графических объектов в ЛогоМирах
Составление программ рисования графических объектов в ЛогоМирах Презентация по подготовке к проведению сейсморазведочных работ в Аральском море
Презентация по подготовке к проведению сейсморазведочных работ в Аральском море Растениеводство в нашем крае. 4 класс
Растениеводство в нашем крае. 4 класс Игра Ребусы. Животные
Игра Ребусы. Животные Медициналық қызмет көлемі және құрылысы
Медициналық қызмет көлемі және құрылысы Музей Метрополитен Нью Йорк
Музей Метрополитен Нью Йорк Көшбасшылық психологиясы
Көшбасшылық психологиясы Конструкция: часть и целое. Здание как сочетание различных объемов. Понятие модуля. 8 класс
Конструкция: часть и целое. Здание как сочетание различных объемов. Понятие модуля. 8 класс Разработка классного часа. Построим дом счастья.
Разработка классного часа. Построим дом счастья. Система счисления
Система счисления Кубанская область и Черноморская губерния (1900 - 1920)
Кубанская область и Черноморская губерния (1900 - 1920)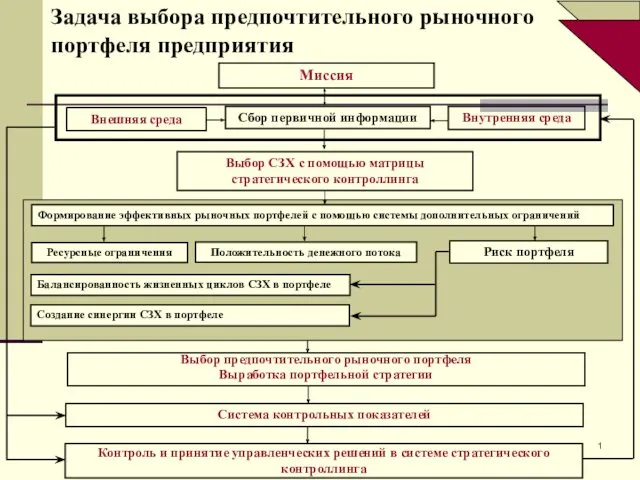 Задача выбора предпочтительного рыночного портфеля предприятия. Тема 5
Задача выбора предпочтительного рыночного портфеля предприятия. Тема 5 Внеклассное мероприятие с мультимедийной презентацией Тема: Пионеры – герои
Внеклассное мероприятие с мультимедийной презентацией Тема: Пионеры – герои