- Автоматическая стабилизация и управление углом тангажа

Содержание
- 2. Автопилот угла тангажа (АП) - средство автоматического управления, обеспечивающее стабилизацию и управление продольным короткопериодическим движением самолета
- 3. Состав автопилота: Датчики определения текущих и заданных параметров ЛА; Вычислитель , формирующий управляющий сигнал; Сервопривод, отрабатывающий
- 4. Кинематическая схема последовательного включения исполнительного устройства автоматики в проводку управления через раздвижную тягу Кинематическая схема последовательного
- 5. Система продольного управления с САУ, включённой по параллельной схеме при наличии вспомогательного привода:
- 6. Схема продольного управления с САУ, включённой по последовательной схеме
- 7. Схема аналогового электромеханического автопилота угла тангажа с жесткой и скоростной обратными связями в сервоприводе Состав автопилота:
- 8. Режимы работы АП СОГЛАСОВАНИЕ - рулевая машина высоты не включена, а положение ее выходного вала согласовано
- 9. Функциональная схема аналогового электрогидравлического автопилота угла тангажа Состав автопилота входят те же датчики текущих и заданных
- 10. В процессе эксплуатации осуществляется Проверка работоспособности: Включение питания АП; Включение режимов АП; Включение сигнализации режимов АП;
- 11. 1.2.1 Процесс устранения начального значения угла тангажа . меняет знак 1.2. Управление продольным короткопериодическим движением
- 12. 1. Точность стабилизации угла тангажа 2. Перерегулирование тангажа 3. Время регулирования тангажа Показатели качества управления по
- 13. 1.2.2. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в сервоприводе внешнего ступенчатого моментного возмущения
- 14. 1.2.3. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в сервоприводе ступенчатого внешнего вертикального ветрового
- 15. 1.2.4. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в сервоприводе ступенчатого внешнего силового возмущения
- 16. Лекция 2. Особенности законов управления автопилотов угла тангажа. Для обеспечения астатизма применяются три основных способа. Первый
- 17. 1. Закон управления автопилота угла тангажа с изодромной обратной связью в сервоприводе Изодромную обратную связь можно
- 18. 1. Если автопилот отклоняет руль высоты на угол , то сигнал изодромной обратной связи будет изменяться
- 19. 2. Закон управления автопилота, реализующего принцип пропорционально-интегрально-дифференциального управления (ПИД-управления), имеет вид Данный закон аналогичен рассмотренному процессу
- 20. 3. Использование дополнительного параллельного интегрирующего сервопривода Интегрирующая составляющая закона управления получается путем пропускания сигнала через лектромеханический
- 22. Закон управления цифроаналогового автопилота в режиме стабилизации угла тангажа имеет вид
- 24. Скачать презентацию
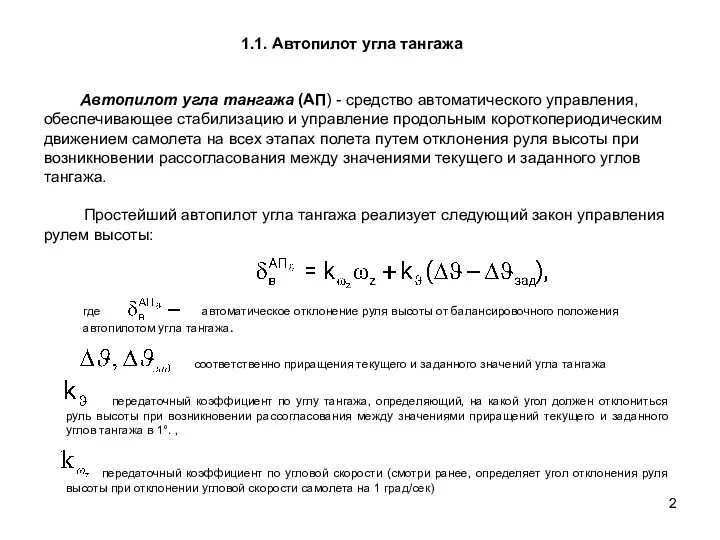
Автопилот угла тангажа (АП) - средство автоматического управления, обеспечивающее стабилизацию и
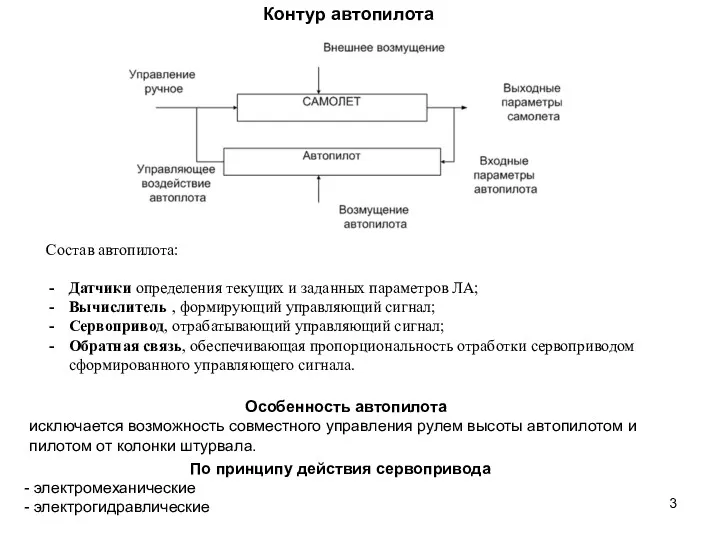
Состав автопилота:
Датчики определения текущих и заданных параметров ЛА;
Вычислитель , формирующий управляющий
Состав автопилота:
Датчики определения текущих и заданных параметров ЛА;
Вычислитель , формирующий управляющий
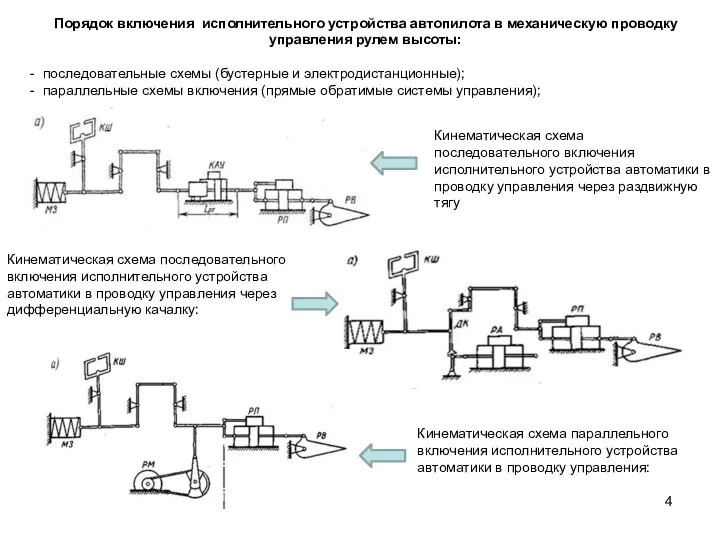
Кинематическая схема последовательного включения исполнительного устройства автоматики в проводку управления через
Кинематическая схема последовательного включения исполнительного устройства автоматики в проводку управления через
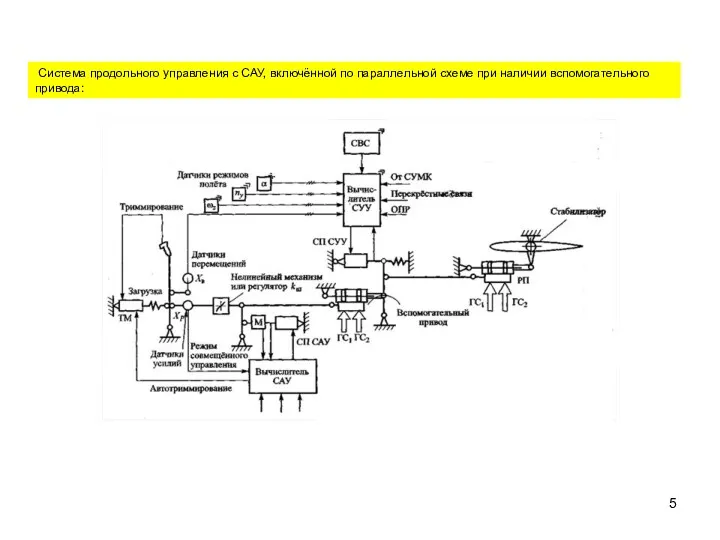
Система продольного управления с САУ, включённой по параллельной схеме при
Система продольного управления с САУ, включённой по параллельной схеме при
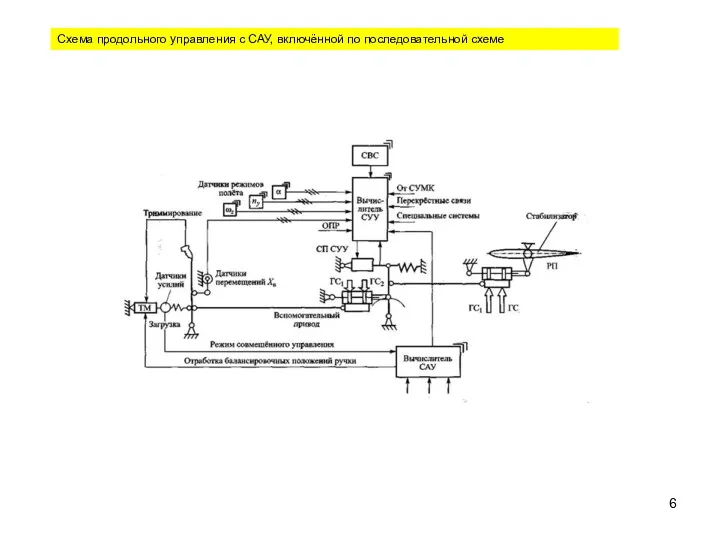
Схема продольного управления с САУ, включённой по последовательной схеме
Схема продольного управления с САУ, включённой по последовательной схеме
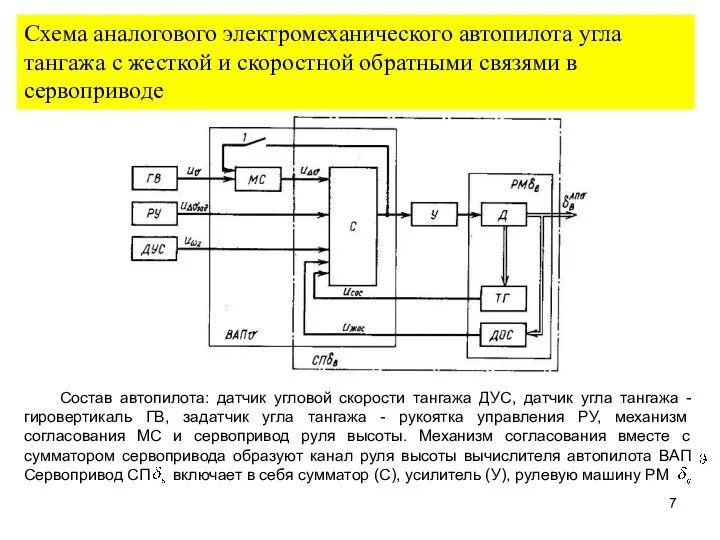
Схема аналогового электромеханического автопилота угла тангажа с жесткой и скоростной обратными
Схема аналогового электромеханического автопилота угла тангажа с жесткой и скоростной обратными
Режимы работы АП
СОГЛАСОВАНИЕ - рулевая машина высоты не включена, а положение
Режимы работы АП
СОГЛАСОВАНИЕ - рулевая машина высоты не включена, а положение
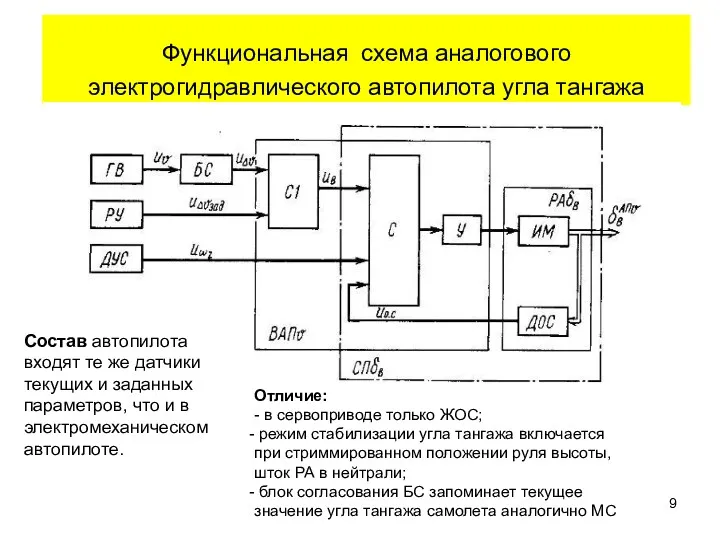
Функциональная схема аналогового электрогидравлического автопилота угла тангажа
Состав автопилота входят те же
Функциональная схема аналогового электрогидравлического автопилота угла тангажа
Состав автопилота входят те же
В процессе эксплуатации осуществляется
Проверка работоспособности:
Включение питания АП;
Включение режимов АП;
Включение
В процессе эксплуатации осуществляется
Проверка работоспособности:
Включение питания АП;
Включение режимов АП;
Включение
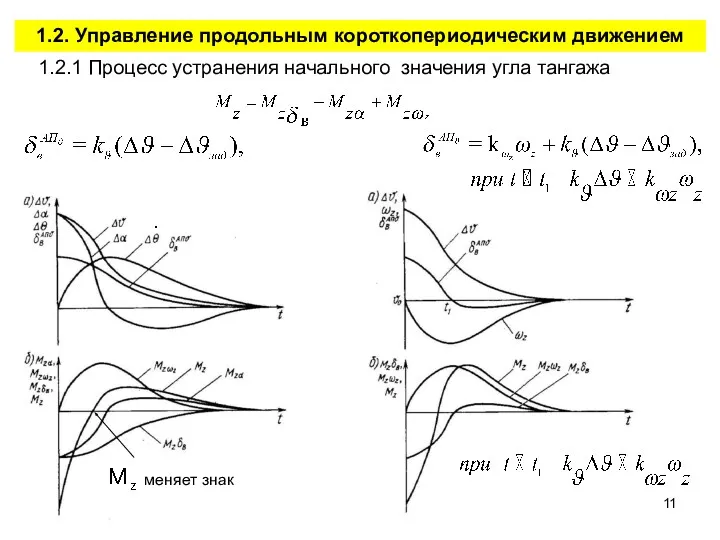
1.2.1 Процесс устранения начального значения угла тангажа
.
меняет знак
1.2. Управление
1.2.1 Процесс устранения начального значения угла тангажа
.
меняет знак
1.2. Управление
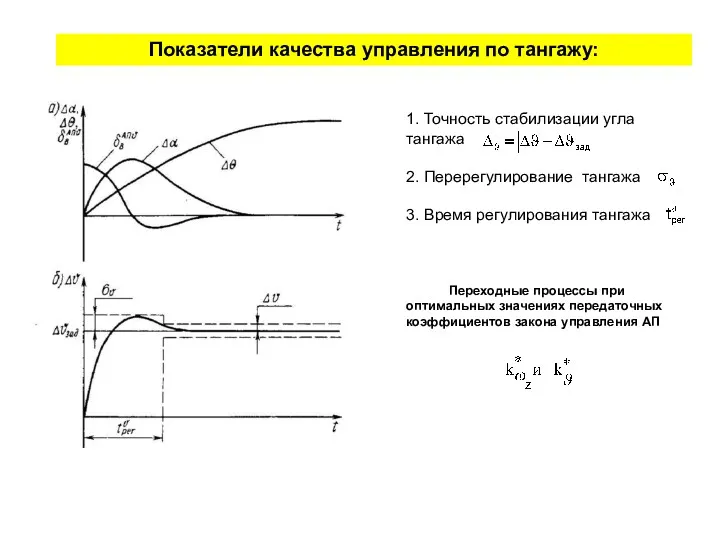
1. Точность стабилизации угла тангажа
2. Перерегулирование тангажа
3. Время регулирования тангажа
Показатели
2. Перерегулирование тангажа
3. Время регулирования тангажа
Показатели
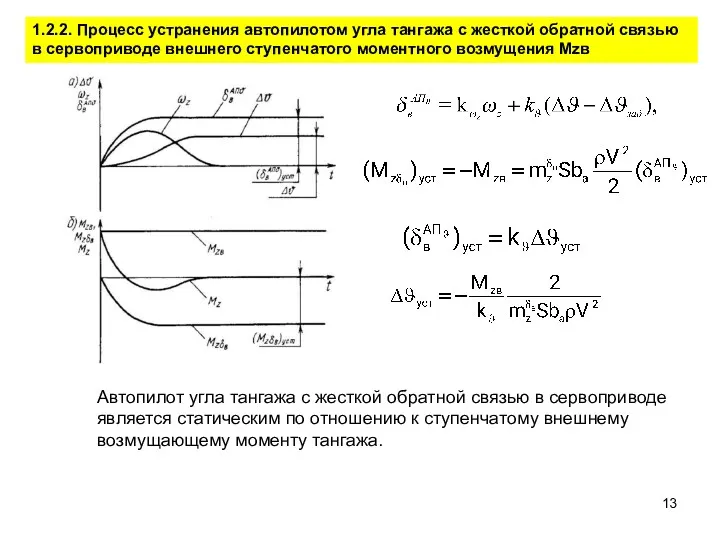
1.2.2. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
1.2.2. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
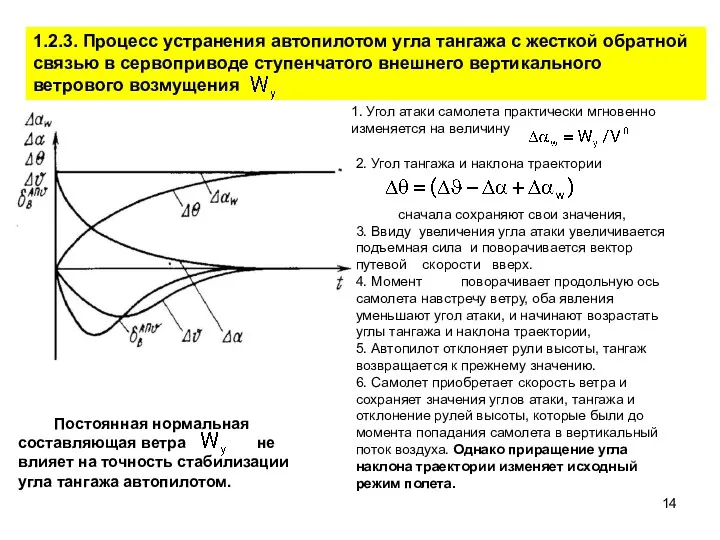
1.2.3. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
1.2.3. Процесс устранения автопилотом угла тангажа с жесткой обратной связью в
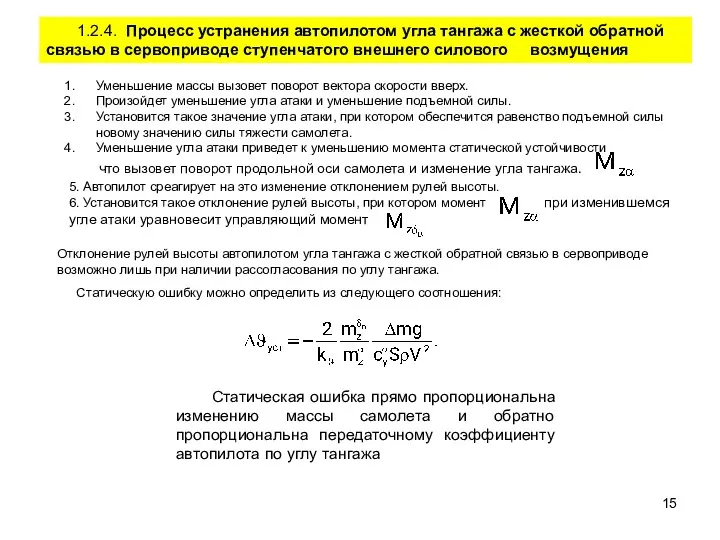
1.2.4. Процесс устранения автопилотом угла тангажа с жесткой обратной связью
1.2.4. Процесс устранения автопилотом угла тангажа с жесткой обратной связью
Лекция 2.
Особенности законов управления автопилотов угла тангажа.
Для обеспечения астатизма применяются
Лекция 2.
Особенности законов управления автопилотов угла тангажа.
Для обеспечения астатизма применяются
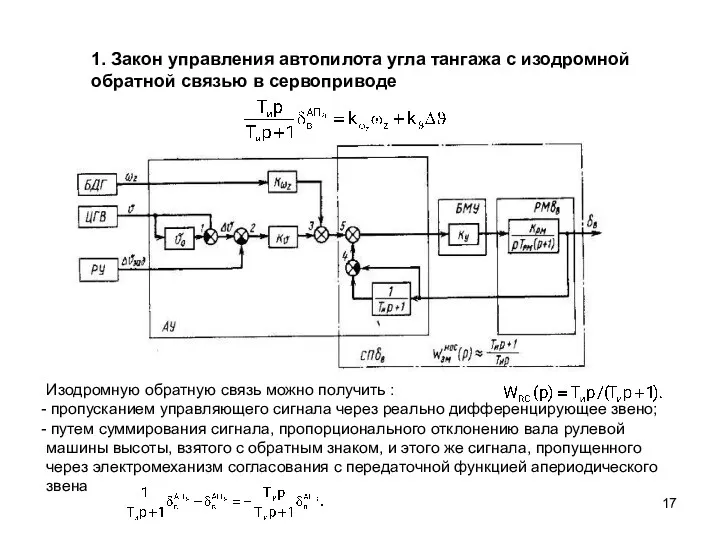
1. Закон управления автопилота угла тангажа с изодромной обратной связью в
1. Закон управления автопилота угла тангажа с изодромной обратной связью в
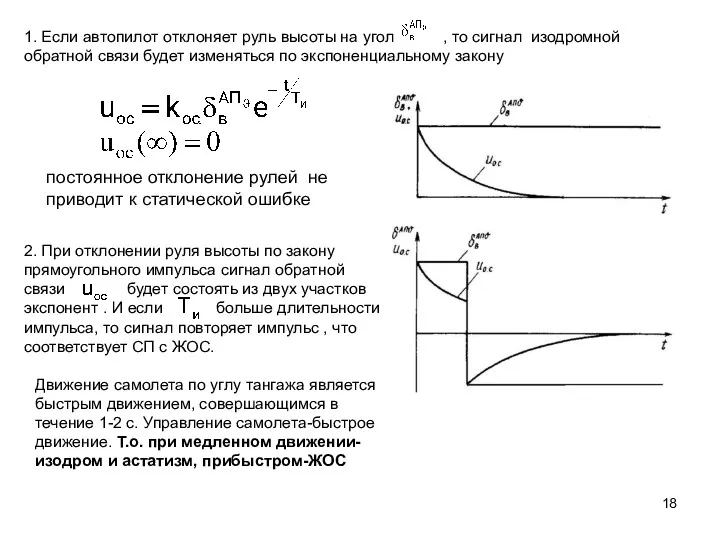
1. Если автопилот отклоняет руль высоты на угол , то сигнал
1. Если автопилот отклоняет руль высоты на угол , то сигнал
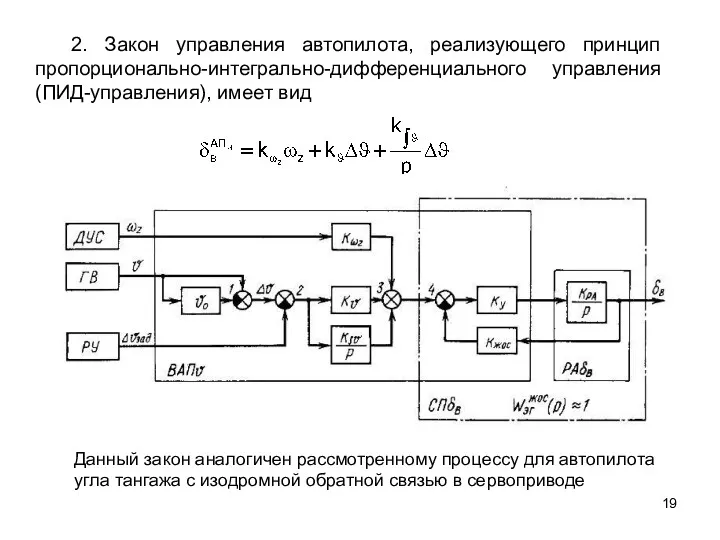
2. Закон управления автопилота, реализующего принцип пропорционально-интегрально-дифференциального управления (ПИД-управления), имеет вид
2. Закон управления автопилота, реализующего принцип пропорционально-интегрально-дифференциального управления (ПИД-управления), имеет вид

3. Использование дополнительного параллельного интегрирующего сервопривода
Интегрирующая составляющая закона управления получается путем
3. Использование дополнительного параллельного интегрирующего сервопривода
Интегрирующая составляющая закона управления получается путем
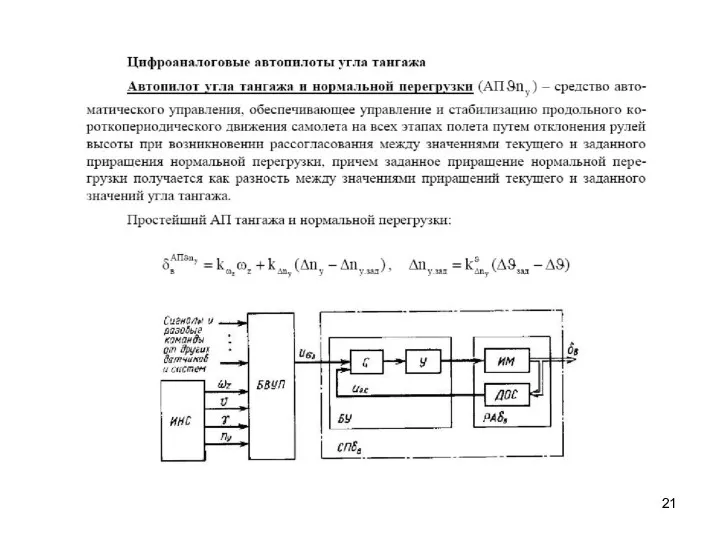

Закон управления цифроаналогового автопилота в режиме стабилизации угла тангажа имеет вид
Закон управления цифроаналогового автопилота в режиме стабилизации угла тангажа имеет вид
 Сюжеты и образы духовной музыки
Сюжеты и образы духовной музыки Достопримечательности Ульяновской области
Достопримечательности Ульяновской области В семье первоклассник
В семье первоклассник Тригонометрические функции числового аргумента
Тригонометрические функции числового аргумента Введение в черчение
Введение в черчение Основы флористики
Основы флористики Презентация ко Дню России
Презентация ко Дню России Презентация к уроку технологии Инструменты помощники
Презентация к уроку технологии Инструменты помощники Формы реализации экономической политики государства
Формы реализации экономической политики государства Средневековые города
Средневековые города Дорогами Великой Отечественной войны. Герои республики Марий Эл
Дорогами Великой Отечественной войны. Герои республики Марий Эл Направления в архитектуре и музыке
Направления в архитектуре и музыке Такие разные Татьяны…
Такие разные Татьяны… Генезис культуры. (Тема 5)
Генезис культуры. (Тема 5) Один - много. Игрушки
Один - много. Игрушки Неправильные-глаголы (1)
Неправильные-глаголы (1) День цвета. Косметика для волос Constant Delight
День цвета. Косметика для волос Constant Delight Географический образ Мексики, часть 2
Географический образ Мексики, часть 2 Основні симптоми та синдроми при цукровому діабеті
Основні симптоми та синдроми при цукровому діабеті Вебинар по обществознанию. Школьный и муниципальный этапы всероссийской олимпиады школьников по истории
Вебинар по обществознанию. Школьный и муниципальный этапы всероссийской олимпиады школьников по истории Презентация Роль полотенца-рушника в традиционной культуре Русского Севера
Презентация Роль полотенца-рушника в традиционной культуре Русского Севера Разработка урока с интерактивной доской, химия 8 класс, Кислоты
Разработка урока с интерактивной доской, химия 8 класс, Кислоты Технология машиностроения
Технология машиностроения Ученые – биологи (2)
Ученые – биологи (2) Инструктаж: Обслуживание вагона
Инструктаж: Обслуживание вагона Сказка про трех братцев am, is, are
Сказка про трех братцев am, is, are Средневековый Китай
Средневековый Китай Advanced web fuzzing today. Веб-сканеры их преимущества и недостатки
Advanced web fuzzing today. Веб-сканеры их преимущества и недостатки