- Автоматизированные системы управления. Цель и задачи курса

Содержание
- 2. Лекция №1 Цель и задачи курса. 1. Краткие исторические сведения. 2. Основные понятия и определения дисциплины.
- 3. Список рекомендуемой литературы Мартыненко и др. Автоматика и автоматизация производственных процессов М. Агропромиздат 1985г. 2. Бородин
- 4. Главные цели автоматизации: повышение производительности труда, обеспечение безопасности работ и улучшение качества продукции при условии оптимального
- 5. Т А У Реальные объекты математические модели 3
- 6. Система регулирования температуры 2
- 7. Автоматическое управление – управление, осуществляемое без непосредственного участия человека. Объект управления (объект регулирования, ОУ) – устройство,
- 8. Ручное управление – все функции управления выполняет человек-оператор. Автоматизированное управление – управление, при котором часть функций
- 9. Входное воздействие (Х) – воздействие, подаваемое на вход системы или устройства. Выходное воздействие (Y) – воздействие,
- 10. Управляющее воздействие (u) - воздействие управляющего устройства на объект управления. Управляющее устройство (УУ) - устройство, осуществляющее
- 11. Ошибка управления (е = х - у) - разность между предписанным (х) и действительным (у) значениями
- 12. УПРАВЛЯЮЩЕЕ УСТРОИСТВО (УУ) – совоку- пность элементов, обеспечивающих управление. АВТОМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОИ- СТВО (АУУ) - устройство,
- 13. Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью воздействия, в котором управление (u) вырабатывается
- 14. 2. Методы и функции управления технологическими процессами Сортировка Сигнализация Сбор информации Защита (автоблокировка) Дистанционное управление Измерение
- 15. А в т о м а т и ч е с к и е и з
- 16. А в т о м а т и ч е с к и й с б
- 17. Телемеханическое управление – АУ, предназначенные автоматической передачи на расстояние команд управления и получения информации о состоянии
- 18. 3. К л а с с и ф и к а ц и я С А
- 19. Н е д о с т а т о к – невозможность коррекции управления при нежелательном
- 20. б) Управлением по отклонению называется управление, основанное на использовании информации о результатах управления 7 f(t) x(t)
- 21. Этот принцип управления называется принципом обратной связи (ОС) или замкнутым управлением Основной н е д о
- 22. Если можно измерить возмущение, то этот сигнал можно использовать в разомкнутой САУ для увеличения ее точности.
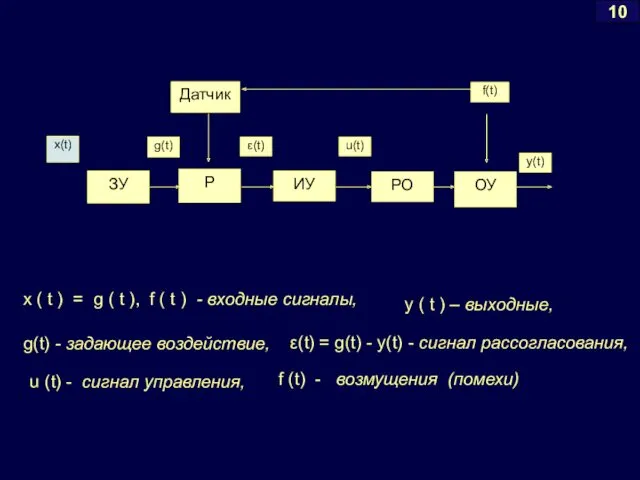
- 23. Датчик Р ЗУ ИУ РО ОУ f(t) g(t) ε(t) y(t) u(t) x(t) x ( t )
- 24. САУ, основанные на одновременном использовании принципов управления по отклонению и по возмущению, называются к о м
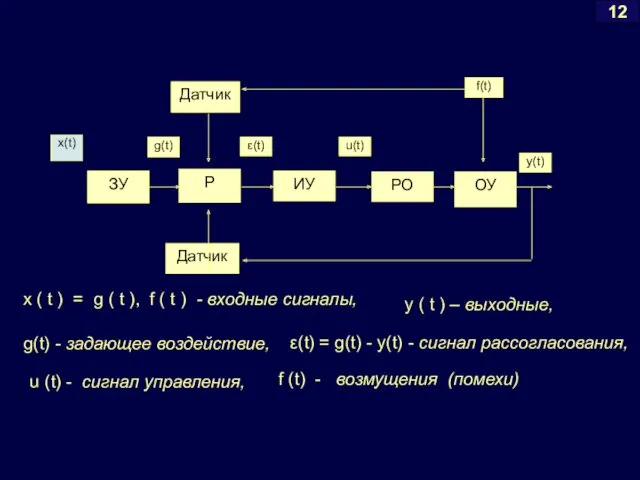
- 25. Датчик Р Датчик ЗУ ИУ РО ОУ f(t) g(t) ε(t) y(t) u(t) x(t) x ( t
- 26. 1.2 По виду задающего воздействия САУ с ОС бывают: - следящими, - стабилизации - программного управления
- 27. Системой стабилизации называется следящая САУ при постоянном задающем воздействии: g(t) = const Следящей называется САУ, предназначенная
- 29. Скачать презентацию
Лекция №1
Цель и задачи курса.
1. Краткие исторические сведения.
2. Основные понятия
Лекция №1 Цель и задачи курса. 1. Краткие исторические сведения. 2. Основные понятия
Список рекомендуемой литературы
Мартыненко и др. Автоматика и автоматизация производственных процессов М.
Список рекомендуемой литературы
Мартыненко и др. Автоматика и автоматизация производственных процессов М.
Главные цели автоматизации:
повышение производительности труда,
обеспечение безопасности работ
Главные цели автоматизации:
повышение производительности труда,
обеспечение безопасности работ
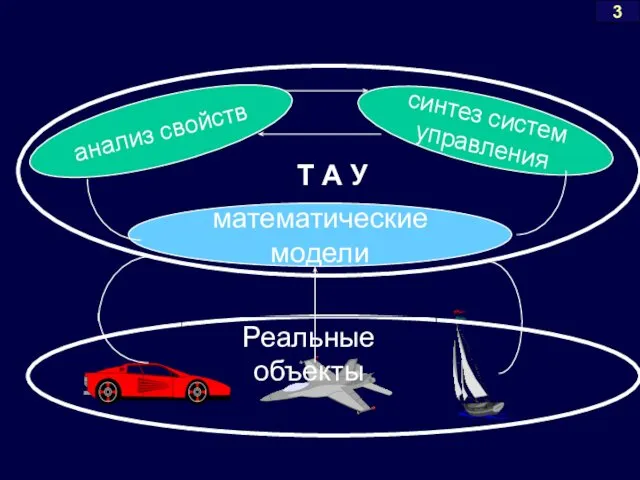
Т А У
Реальные объекты
математические модели
3
Т А У
Реальные объекты
математические модели
3

Система регулирования температуры
2
Система регулирования температуры
2
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Ручное управление – все функции управления выполняет человек-оператор.
Автоматизированное
Ручное управление – все функции управления выполняет человек-оператор.
Автоматизированное
Входное воздействие (Х) – воздействие, подаваемое на вход системы или
Входное воздействие (Х) – воздействие, подаваемое на вход системы или
Управляющее воздействие (u) - воздействие управляющего устройства на объект управления.
Управляющее устройство
Управляющее воздействие (u) - воздействие управляющего устройства на объект управления.
Управляющее устройство
Ошибка управления (е = х - у) - разность между предписанным
Ошибка управления (е = х - у) - разность между предписанным
УПРАВЛЯЮЩЕЕ УСТРОИСТВО (УУ) – совоку-
пность элементов, обеспечивающих управление.
АВТОМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОИ-
СТВО (АУУ)
УПРАВЛЯЮЩЕЕ УСТРОИСТВО (УУ) – совоку-
пность элементов, обеспечивающих управление.
АВТОМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОИ-
СТВО (АУУ)
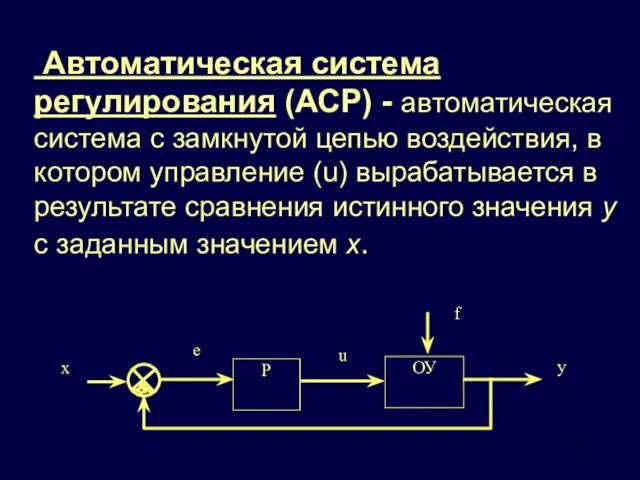
Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью
Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью

2. Методы и функции управления
технологическими процессами
Сортировка
Сигнализация
Сбор
информации
Защита
(автоблокировка)
Дистанционное
2. Методы и функции управления
технологическими процессами
Сортировка
Сигнализация
Сбор
информации
Защита
(автоблокировка)
Дистанционное
А в т о м а т и ч е с
А в т о м а т и ч е с
А в т о м а т и ч е с
Телемеханическое управление
– АУ, предназначенные автоматической передачи на расстояние команд управления
– АУ, предназначенные автоматической передачи на расстояние команд управления
3. К л а с с и ф и к а
3. К л а с с и ф и к а
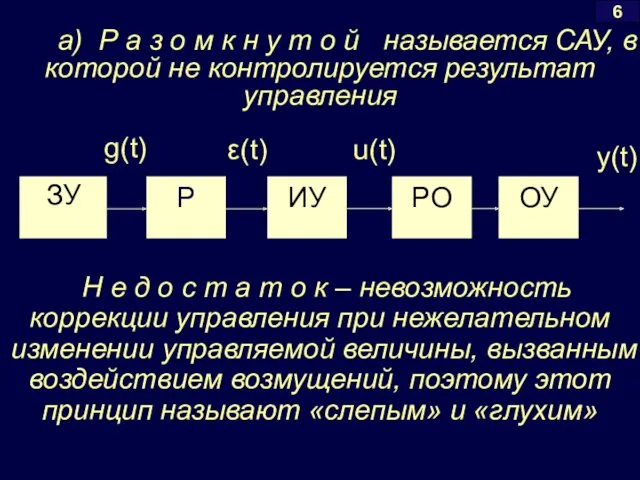
Н е д о с т а т о к
Н е д о с т а т о к
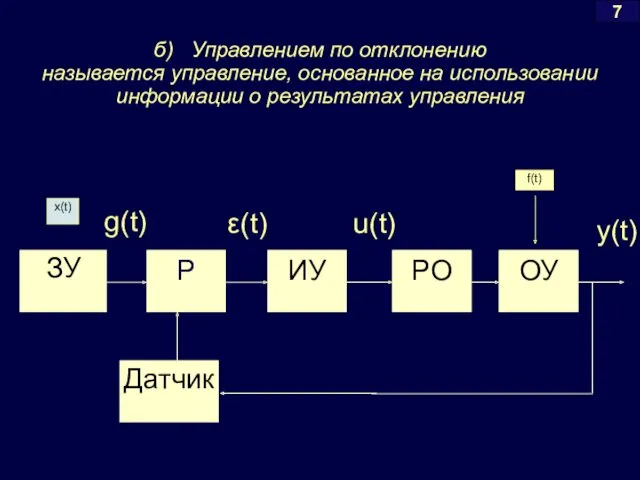
б) Управлением по отклонению
называется управление, основанное на использовании информации о результатах
б) Управлением по отклонению
называется управление, основанное на использовании информации о результатах
Этот принцип управления называется принципом обратной связи (ОС)
или замкнутым управлением
Основной
Этот принцип управления называется принципом обратной связи (ОС)
или замкнутым управлением
Основной
Если можно измерить возмущение, то этот сигнал можно использовать в разомкнутой
Если можно измерить возмущение, то этот сигнал можно использовать в разомкнутой
Датчик
Р
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f
Датчик
Р
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f
САУ, основанные на одновременном использовании принципов управления по отклонению и по
САУ, основанные на одновременном использовании принципов управления по отклонению и по
Датчик
Р
Датчик
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f
Датчик
Р
Датчик
ЗУ
ИУ
РО
ОУ
f(t)
g(t)
ε(t)
y(t)
u(t)
x(t)
x ( t ) = g ( t ), f
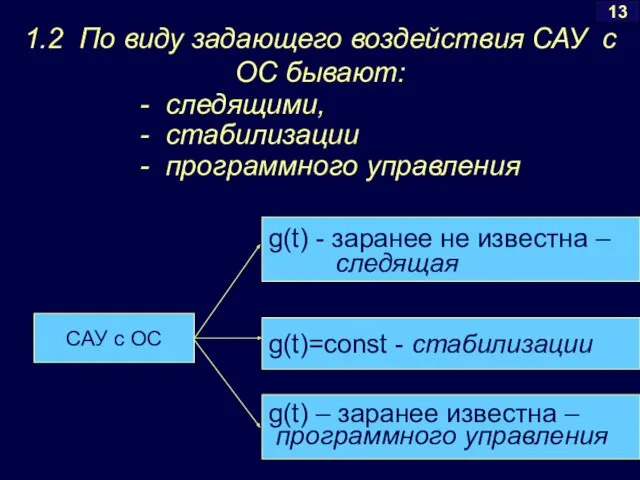
1.2 По виду задающего воздействия САУ с ОС бывают:
-
1.2 По виду задающего воздействия САУ с ОС бывают:
-
Системой стабилизации называется следящая САУ при
постоянном задающем воздействии: g(t)
Системой стабилизации называется следящая САУ при
постоянном задающем воздействии: g(t)
 Виды конструкторской документации
Виды конструкторской документации Нефть и способы ее переработки
Нефть и способы ее переработки Традиции русского чаепития
Традиции русского чаепития ПОСТРОЕНИЕ РАЗВИВАЮЩЕЙ СРЕДЫ ПО ФГОС
ПОСТРОЕНИЕ РАЗВИВАЮЩЕЙ СРЕДЫ ПО ФГОС APN Polska
APN Polska Художественная обработка древесины. Мозаика. 7 класс
Художественная обработка древесины. Мозаика. 7 класс Презетация По праздничным иконам вспоминаем Евангелие. Рождество Христово.
Презетация По праздничным иконам вспоминаем Евангелие. Рождество Христово. Данные. Операции с данными
Данные. Операции с данными Физминутка Зарядка
Физминутка Зарядка Система комп’ютерного моделювання процесів життєдіяльності органів і систем організму СКІФ
Система комп’ютерного моделювання процесів життєдіяльності органів і систем організму СКІФ Управление качеством
Управление качеством Верховный бог Олимпа Зевс
Верховный бог Олимпа Зевс Совершенства (атрибуты) Бога
Совершенства (атрибуты) Бога Формирование информационной культуры личности
Формирование информационной культуры личности Возбудитель коклюша Bordetella pertussis
Возбудитель коклюша Bordetella pertussis Презентация о Молдавии
Презентация о Молдавии Особенности социально-педагогического сопровождения детей-сирот и детей, оставшихся без попечения родителей
Особенности социально-педагогического сопровождения детей-сирот и детей, оставшихся без попечения родителей По дорогам сказок
По дорогам сказок Космические телескопы
Космические телескопы Національна економіка
Національна економіка КВН Какое прекрасное имя Россия
КВН Какое прекрасное имя Россия История ХХ века как анекдот в романе Ю. Юнассона и его экранизации
История ХХ века как анекдот в романе Ю. Юнассона и его экранизации Балаганная игрушка Петрушка из папье-маше (3 класс)
Балаганная игрушка Петрушка из папье-маше (3 класс) Растительность Уссурийской тайги
Растительность Уссурийской тайги Industry of fish and fish products
Industry of fish and fish products Ізотопи і нукліди
Ізотопи і нукліди Образ коня в каргопольской игрушке
Образ коня в каргопольской игрушке Классный час День Неизвестного солдата
Классный час День Неизвестного солдата