- Автоматты реттеу заңдары

Содержание
- 2. Басқарылатын шаманың берілген және нақты мәндерінің айырмасын қабылдай отырып атқарушы органга берілген заңдылықпен басқару ықпалын жасайтын
- 3. 1. Позициялы (релелі) регулятордың сигналы реттеуші органды берілген позицияға немесе орынға жылжытады. Мұндай позициялар екіден аз
- 4. 2а шамасы екі позициялы регулятордың бір мағаналы емес зонасы (1, б суреті). Кіріс x шамасы (өзі
- 5. Үш позициялы регуляторларда (1, б суреті) екі позициялы регуляторларға қарағанда екі тұрақты «көбірек» В1 және «азырақ»
- 6. 05
- 7. Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у(p) к преобразованному по Лапласу входу
- 8. П-регуляторімен кез келген тұрақты объектіні басқаруға болады. Бірақ онда өтпелі процесс баяу өтеді. Сатикалық қате нөлге
- 9. 03
- 10. 04
- 11. 05
- 12. 06
- 13. Дифференциалды регулятор реттелетін шаманың абсолютті мәні емес оның өзгеру жылдамдығына әсер ететін болғандықтан оны тек күрделі
- 14. 08
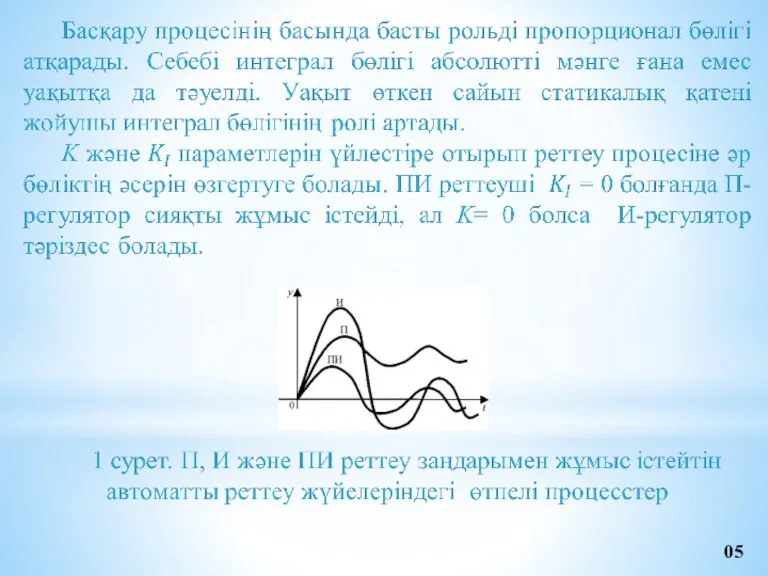
- 15. 2 с урет. П және ПД реттеу заңдарымен жұмыс істейтін автоматты реттеу жүйелеріндегі өтпелі процесстер 07
- 16. 09
- 18. Скачать презентацию
Басқарылатын шаманың берілген және нақты мәндерінің айырмасын қабылдай отырып атқарушы органга
Басқарылатын шаманың берілген және нақты мәндерінің айырмасын қабылдай отырып атқарушы органга
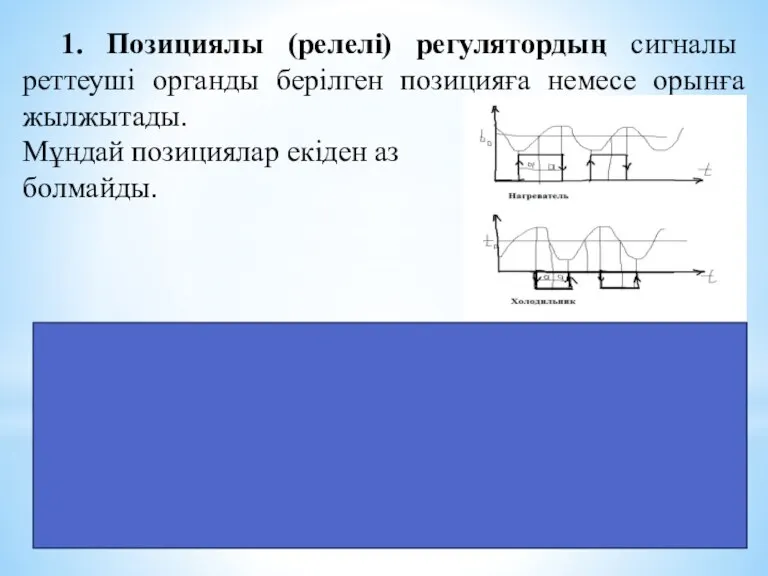
1. Позициялы (релелі) регулятордың сигналы реттеуші органды берілген позицияға немесе орынға
1. Позициялы (релелі) регулятордың сигналы реттеуші органды берілген позицияға немесе орынға
2а шамасы екі позициялы регулятордың бір мағаналы емес зонасы (1, б
2а шамасы екі позициялы регулятордың бір мағаналы емес зонасы (1, б
Үш позициялы регуляторларда (1, б суреті) екі позициялы регуляторларға қарағанда екі
Үш позициялы регуляторларда (1, б суреті) екі позициялы регуляторларға қарағанда екі
05
05
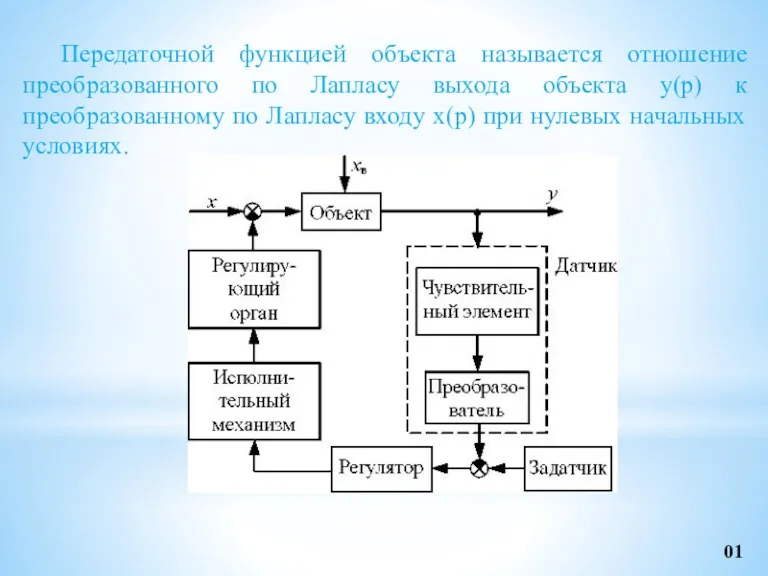
Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у(p)
Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у(p)
П-регуляторімен кез келген тұрақты объектіні басқаруға болады.
Бірақ онда өтпелі процесс
П-регуляторімен кез келген тұрақты объектіні басқаруға болады.
Бірақ онда өтпелі процесс
03
03
04
04
05
05
06
06
Дифференциалды регулятор реттелетін шаманың абсолютті мәні емес оның өзгеру жылдамдығына әсер
Дифференциалды регулятор реттелетін шаманың абсолютті мәні емес оның өзгеру жылдамдығына әсер
08
08
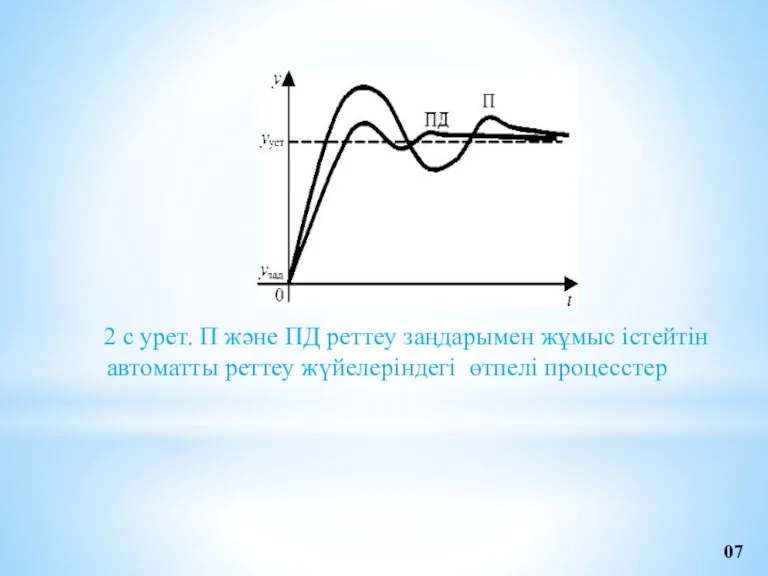
2 с урет. П және ПД реттеу заңдарымен жұмыс істейтін автоматты
2 с урет. П және ПД реттеу заңдарымен жұмыс істейтін автоматты
09
09
 Метод фокальных объектов
Метод фокальных объектов Презентация к родительскому собранию Правила здорового питания
Презентация к родительскому собранию Правила здорового питания Презентация День Конституции России
Презентация День Конституции России Сушка измельченной древесины (продолжение). Лекция №6
Сушка измельченной древесины (продолжение). Лекция №6 Цветик-семицветик
Цветик-семицветик Предложение о сотрудничестве для партнеров. Центр помощи многодетным семьям
Предложение о сотрудничестве для партнеров. Центр помощи многодетным семьям Представление чисел в ЭВМ
Представление чисел в ЭВМ Презентация. Мы живем на земле Сталинградской
Презентация. Мы живем на земле Сталинградской Урок географии. 6 класс. Ориентирование по плану местности. Азимут.
Урок географии. 6 класс. Ориентирование по плану местности. Азимут. Психология обучения
Психология обучения EMS mulfunction
EMS mulfunction 11 “Б” представляет
11 “Б” представляет Биоэтические аспекты инфекционных заболеваний, как источник социальной опасности. Биоэтические аспекты, связанные с ВИЧ
Биоэтические аспекты инфекционных заболеваний, как источник социальной опасности. Биоэтические аспекты, связанные с ВИЧ Создание мультфильмов вместе с детьми
Создание мультфильмов вместе с детьми Моя публикация. Разработка урока по химии 8 класс для детей ОВЗ
Моя публикация. Разработка урока по химии 8 класс для детей ОВЗ Prezentatsia (1)
Prezentatsia (1) Woher kommst du
Woher kommst du Фотопроект Грегга Сегала Люди и мусор, накопленный за 7 дней
Фотопроект Грегга Сегала Люди и мусор, накопленный за 7 дней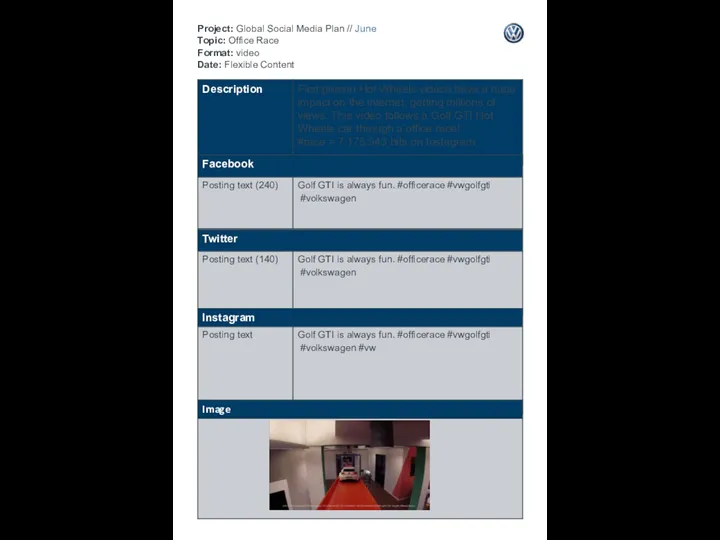 Office Race
Office Race Комплексные решения коррекции фигуры
Комплексные решения коррекции фигуры Chiny – najludniejszy kraj świata
Chiny – najludniejszy kraj świata Иконопись. Русская икона
Иконопись. Русская икона Презентация для логопедических занятий с детьми на тему: Артикуляционная гимнастика (звуки [Л][Л`])
Презентация для логопедических занятий с детьми на тему: Артикуляционная гимнастика (звуки [Л][Л`]) Электронная игра Подбери по форме и цвету
Электронная игра Подбери по форме и цвету 20231105_trenirovochnye_uprazhneniya_na_razvitie_vnimaniya
20231105_trenirovochnye_uprazhneniya_na_razvitie_vnimaniya Прогнозирование социально-экономического развития субъекта РФ. Региональный форсайт
Прогнозирование социально-экономического развития субъекта РФ. Региональный форсайт Наши отцы и деды - защитники Родины
Наши отцы и деды - защитники Родины Презентация по теме Географические координаты 6 класс
Презентация по теме Географические координаты 6 класс