Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.3) презентация
- Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.3)

Содержание
- 2. Устрій та бойове застосування КЗА 86Ж6 Тема № 8: Бойове застосування КЗА 86Ж6. Алгоритми розв'язання функціональних
- 3. ЛІТЕРАТУРА: Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за редакцією Сторубльова О.І.) Навчальний посібник. -
- 4. Навчальні питання 1. Група програм автоматичного захоплення та супроводження повітряних об’єктів за даними УПО 2. Автоматичне
- 5. Етапи автоматичного захоплення та супроводження: 1. Попереднє ототожнення. 2. Точне ототожнення. 3. Формування трасових даних. Задачі
- 6. формування груп, близьких між собою КТ-А та трас; виявлення КТ-А, що відповідають несупроводжуваним ПО, та передача
- 7. встановлення взаємно-однозначної відповідності між КТ-А та трасами; аналіз подальшої обробки. Точне ототожнення.
- 8. організація захоплення (обробка перших та других вводів); згладжування координат та параметрів руху, виявлення маневру; організація передачі
- 9. Під автоматичним захопленням розуміємо процес виявлення траси ПО, що починається першим вводом і закінчується визначенням швидкостей
- 10. Автоматичне захоплення цілі на супроводження
- 11. Автоматичний перший ввод починається з КТ-А, котра не попадає в жодний з наявних стробів ЕТ. Заповнення
- 12. При попаданні в строб при наступному огляді однієї чи декількох КТ-А ототожненням визначається та з них,
- 13. На основі отриманих параметрів руху ПО з'являється можливість розрахувати координати ЕТ та обчислити розміри стробу, виходячи
- 14. Попереднє ототожнення має на меті формування локальних груп близько розташованих одна до одної координатних точок та
- 15. До першої групи входять КТ-А 1, 2, 3 та ЕТ 1, 2. До другої групи входять
- 16. Основне призначення точного ототожнення - встановлення однозначної відповідності між автоматично супроводжуваними трасами та КТ-А однієї локальної
- 17. Логіка додаткової перевірки базується на співставленні номера супроводжуючої РЛС та номера РЛС, від якої отримано КТ-А.
- 18. КТ-А, віднесені до фіктивних трас, по суті не відповідають відомим супроводжуваним чи захоплюваним ПО. Такі КТ-А
- 19. Етап згладжування координат та параметрів руху ПО починається з прийому на обробку КТ-А, що надійшла по
- 20. По причині різних точностей вимірів координат РЛС величини порогів оцінки якості супроводження та виявлення маневру ПО
- 21. При обробці координатної інформації про висоту необхідно розрізняти: - до складу КТ-А входить достовірне значення кута
- 22. При роботі з двокоординатними РЛС на етапі захоплення висота цілі визначається по ε=0, при цьому значення
- 23. Розрахунок ЕТ виконується при оновленні траси в автоматичному та напівавтоматичному режимах супроводження та при виявленні пропусків.
- 24. Ділянка простору, в якій очікується поява відмітки від ПО в момент майбутньої локації, називається стробом. Фізичним
- 25. При попаданні КТ у строб ЕТ по координатах Х, Y, Н розраховується відстань у площині між
- 26. Величина Δβ визначається за формулою:
- 27. Окрiм фiзичного стробування розв'язується задача математичного стробування Координати КТ перераховуються з систем координат Д, β, ε
- 28. У процесі періодичної обробки розв'язуються задачі: - виявлення пропусків оновлення траси; - звільнення формулярів ПО за
- 29. Контроль за оновленням висоти виконується по часу її оновлення. Час останнього оновлення записано в формулярі. Якщо
- 30. Автоматичне захоплення цілей може виконуватись лише в зонi дозволеного автозахоплення по даних РЛС. Пiдключення РЛС до
- 31. УПО 86Ж6 є двоканальним (1к та 3К), тобто одночасно може обробляти iнформацiю не бiльш, нiж вiд
- 32. Критерії формування пакетів відлуння для УПО У залежності вiд виконуваної задачі, повітряної обстановки та типу РЛС,
- 33. Корегування вводу Для вiдмiни ранiше заданої зони дозволеного автозахоплення помiстiть маркер всередину цiєї зони та натиснiть
- 34. Автоматичне супроводження цiлей можливе за даними РЛС, що мають своє УПО (19Ж6, 55Ж6, 35Д6) або підключені
- 35. Якщо ж розпiзнавання виконане, то в залежностi вiд його результатiв на першому знакомісці формуляру вiдобразиться символ
- 37. Скачать презентацию
Устрій та бойове застосування КЗА 86Ж6
Тема № 8: Бойове застосування КЗА
Устрій та бойове застосування КЗА 86Ж6
Тема № 8: Бойове застосування КЗА
ЛІТЕРАТУРА:
Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за редакцією Сторубльова
ЛІТЕРАТУРА:
Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за редакцією Сторубльова
Навчальні питання
1. Група програм автоматичного захоплення та супроводження повітряних об’єктів
Навчальні питання
1. Група програм автоматичного захоплення та супроводження повітряних об’єктів
Етапи автоматичного захоплення та супроводження:
1. Попереднє ототожнення.
2. Точне ототожнення.
3. Формування трасових
Етапи автоматичного захоплення та супроводження:
1. Попереднє ототожнення.
2. Точне ототожнення.
3. Формування трасових
формування груп, близьких між собою КТ-А та трас;
виявлення КТ-А, що відповідають
формування груп, близьких між собою КТ-А та трас;
виявлення КТ-А, що відповідають
встановлення взаємно-однозначної відповідності між КТ-А та трасами;
аналіз подальшої обробки.
Точне ототожнення.
встановлення взаємно-однозначної відповідності між КТ-А та трасами;
аналіз подальшої обробки.
Точне ототожнення.
організація захоплення (обробка перших та других вводів);
згладжування координат та параметрів руху,
організація захоплення (обробка перших та других вводів);
згладжування координат та параметрів руху,
Під автоматичним захопленням розуміємо процес виявлення траси ПО, що починається першим
Під автоматичним захопленням розуміємо процес виявлення траси ПО, що починається першим

Автоматичне захоплення цілі на супроводження
Автоматичне захоплення цілі на супроводження
Автоматичний перший ввод починається з КТ-А, котра не попадає в жодний
Автоматичний перший ввод починається з КТ-А, котра не попадає в жодний
При попаданні в строб при наступному огляді однієї чи декількох КТ-А
При попаданні в строб при наступному огляді однієї чи декількох КТ-А
На основі отриманих параметрів руху ПО з'являється можливість розрахувати координати ЕТ
На основі отриманих параметрів руху ПО з'являється можливість розрахувати координати ЕТ
Попереднє ототожнення має на меті формування локальних груп близько розташованих одна
Попереднє ототожнення має на меті формування локальних груп близько розташованих одна
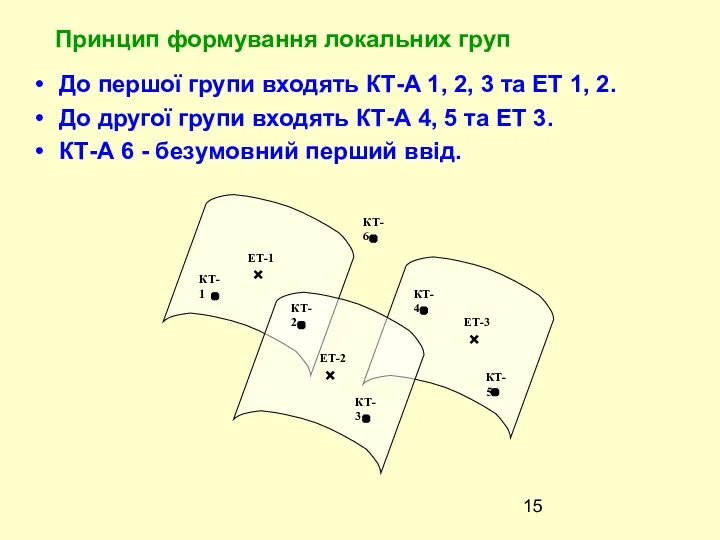
До першої групи входять КТ-А 1, 2, 3 та ЕТ 1,
До першої групи входять КТ-А 1, 2, 3 та ЕТ 1,
Основне призначення точного ототожнення - встановлення однозначної відповідності між автоматично супроводжуваними
Основне призначення точного ототожнення - встановлення однозначної відповідності між автоматично супроводжуваними
Логіка додаткової перевірки базується на співставленні номера супроводжуючої РЛС та номера
Логіка додаткової перевірки базується на співставленні номера супроводжуючої РЛС та номера
КТ-А, віднесені до фіктивних трас, по суті не відповідають відомим супроводжуваним
КТ-А, віднесені до фіктивних трас, по суті не відповідають відомим супроводжуваним
Етап згладжування координат та параметрів руху ПО починається з прийому на
Етап згладжування координат та параметрів руху ПО починається з прийому на
По причині різних точностей вимірів координат РЛС величини порогів оцінки якості
По причині різних точностей вимірів координат РЛС величини порогів оцінки якості
При обробці координатної інформації про висоту необхідно розрізняти:
- до складу КТ-А
При обробці координатної інформації про висоту необхідно розрізняти:
- до складу КТ-А
При роботі з двокоординатними РЛС на етапі захоплення висота цілі визначається
При роботі з двокоординатними РЛС на етапі захоплення висота цілі визначається
Розрахунок ЕТ виконується при оновленні траси в автоматичному та напівавтоматичному режимах
Розрахунок ЕТ виконується при оновленні траси в автоматичному та напівавтоматичному режимах
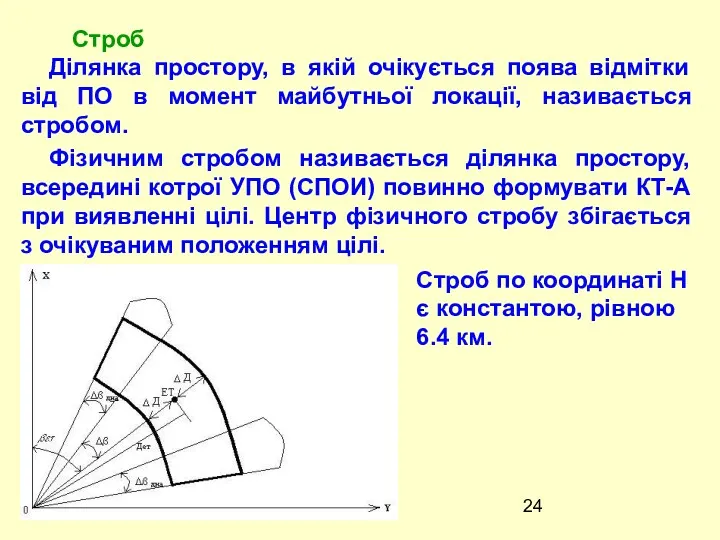
Ділянка простору, в якій очікується поява відмітки від ПО в момент
Ділянка простору, в якій очікується поява відмітки від ПО в момент
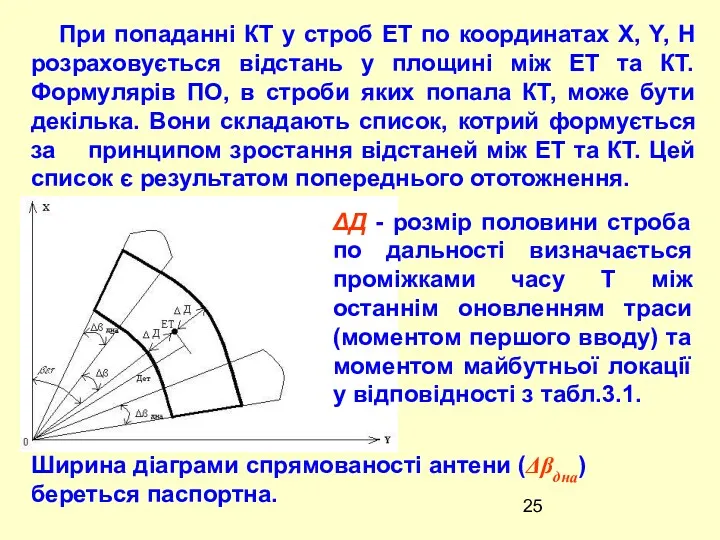
При попаданні КТ у строб ЕТ по координатах Х, Y, Н
При попаданні КТ у строб ЕТ по координатах Х, Y, Н
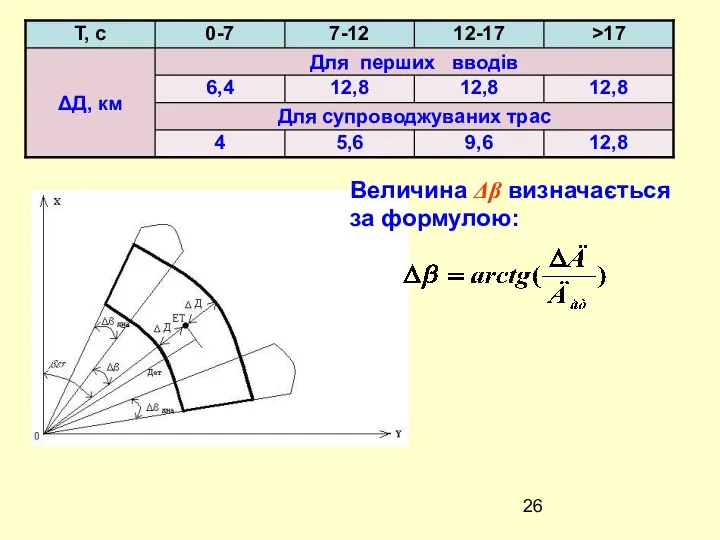
Величина Δβ визначається за формулою:
Величина Δβ визначається за формулою:
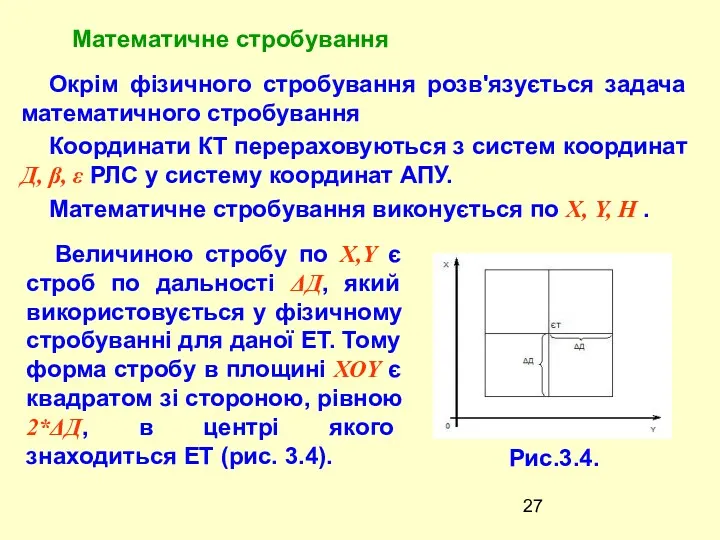
Окрiм фiзичного стробування розв'язується задача математичного стробування
Координати КТ перераховуються з систем
Окрiм фiзичного стробування розв'язується задача математичного стробування
Координати КТ перераховуються з систем
У процесі періодичної обробки розв'язуються задачі:
- виявлення пропусків оновлення траси;
- звільнення
У процесі періодичної обробки розв'язуються задачі:
- виявлення пропусків оновлення траси;
- звільнення
Контроль за оновленням висоти виконується по часу її оновлення. Час останнього
Контроль за оновленням висоти виконується по часу її оновлення. Час останнього
Автоматичне захоплення цілей може виконуватись лише в зонi дозволеного автозахоплення по
Автоматичне захоплення цілей може виконуватись лише в зонi дозволеного автозахоплення по
УПО 86Ж6 є двоканальним (1к та 3К), тобто одночасно може обробляти
УПО 86Ж6 є двоканальним (1к та 3К), тобто одночасно може обробляти
Критерії формування пакетів відлуння для УПО
У залежності вiд виконуваної задачі, повітряної
Критерії формування пакетів відлуння для УПО
У залежності вiд виконуваної задачі, повітряної
Корегування вводу
Для вiдмiни ранiше заданої зони дозволеного автозахоплення помiстiть маркер всередину
Корегування вводу
Для вiдмiни ранiше заданої зони дозволеного автозахоплення помiстiть маркер всередину
Автоматичне супроводження цiлей можливе за даними РЛС, що мають своє УПО
Автоматичне супроводження цiлей можливе за даними РЛС, що мають своє УПО
Якщо ж розпiзнавання виконане, то в залежностi вiд його результатiв на
Якщо ж розпiзнавання виконане, то в залежностi вiд його результатiв на
 ekonomika_1
ekonomika_1 Для защиты (1)
Для защиты (1) f-6a699244
f-6a699244 Скульптура – гімн людині
Скульптура – гімн людині Spor Yönetimi
Spor Yönetimi Игра. Знатоки Илиады и Одиссеи
Игра. Знатоки Илиады и Одиссеи Проблемы субъектов Международного права
Проблемы субъектов Международного права Принципы фармакокоррекции инфекционных и инвазионных болезней
Принципы фармакокоррекции инфекционных и инвазионных болезней Ассирийская держава
Ассирийская держава Кружок Речевичок.Групповое занятие Крапивные истории
Кружок Речевичок.Групповое занятие Крапивные истории Идейно – политические учения
Идейно – политические учения Test result from Aquarius's solenoid lock sample
Test result from Aquarius's solenoid lock sample ВЛИЯНИЕ УСТНОГО НАРОДНОГО ТВОРЧЕСТВА НА РАЗВИТИЕ РЕЧИ ДЕТЕЙ 3 – 4 ЛЕТ.
ВЛИЯНИЕ УСТНОГО НАРОДНОГО ТВОРЧЕСТВА НА РАЗВИТИЕ РЕЧИ ДЕТЕЙ 3 – 4 ЛЕТ. Compare photos
Compare photos Запрещение химического и биологического оружия. Проблемы соблюдения договора о ликвидации ракет средней и меньшей дальности
Запрещение химического и биологического оружия. Проблемы соблюдения договора о ликвидации ракет средней и меньшей дальности Прокуратура Российской Федерации. Организационно-правовые основы деятельности прокуратуры
Прокуратура Российской Федерации. Организационно-правовые основы деятельности прокуратуры Нервная система. Рефлексы
Нервная система. Рефлексы afrika8 slon
afrika8 slon Триз Мир фантазии Урок № 8
Триз Мир фантазии Урок № 8 Числовые и буквенные выражения и их значения
Числовые и буквенные выражения и их значения Общее знакомство с растениями
Общее знакомство с растениями презентация для игры по станциям.
презентация для игры по станциям. Бронхиальная астма у детей
Бронхиальная астма у детей Строгание. Виды рубанков
Строгание. Виды рубанков Дерево тематик. Пассажиры
Дерево тематик. Пассажиры Презентация Брянские поэты
Презентация Брянские поэты Игра РЕГУЛИРОВЩИК
Игра РЕГУЛИРОВЩИК Подбор скважинного оборудования
Подбор скважинного оборудования